337 Simulation and Modelling

of 35
-
Upload
bhavika-tekwani -
Category
Documents
-
view
227 -
download
0
Transcript of 337 Simulation and Modelling
-
8/13/2019 337 Simulation and Modelling
1/35
-
8/13/2019 337 Simulation and Modelling
2/35
There are many application areas, e.g. Computer architecture
Networks/distributed systems
Software performance engineering
Telecommunications
Manufacturing
Healthcare
Transport
Finance
Environmental science/engineering
Here, well focus on the important common principles, ratherthan become entrenched in specic application areas
5
Some Important Questions
What are we trying to measure? How do we measure it? What sorts of model can we build? Is the model well-dened? How can we solve the model? What formalisms can we use to help dene a model? How does the model compare to the real system?
6
The Focus...
Were going to focus on discrete event systems, with continuous time and discrete states
Our models will essentially be stochastic transition systemswhere delays are associated with each state
Different high-level formalisms can be used to dene thesemodels well study some popular approaches
These models can variously be solved using Simulation Numerical algorithms Analytically
Broadly, these are in increasing order of efficiency and decreasingorder of generality
7
This course...
Part I: Models
1. Modelling overview (ajf )
Examples and motivation Performance measures and their relationships
2. Timed transition systems (ajf)
Markov Processes (MPs)
Generalised Semi-Markov Processes (GSMPs)
8
-
8/13/2019 337 Simulation and Modelling
3/35
3. Solution methods (ajf)
Numerical solution of MPs Analytical solution of MPs Simulation of MPs and GSMPs
Part II: High-level formalisms, tools and techniques
1. Discrete-event Simulation (a jf)
Libraries for discrete-event simulation (Java)
Random number generation & distribution sampling Output analysis Applications
9
2. Stochastic Petri Nets (jb)
Notation Generation of underlying MP Applications
3. Stochastic Process Algebras (jb)
Introduction to PEPA Generation of underlying MP
Applications3. Markovian Queueing Networks (jb)
10
Modelling Overview
Example 1: A Simple TP server
A TP system accepts and processes a stream of transactions,mediated through a (large) buffer:
...
Transactions arrive randomly at some specied rate The TP server is capable of servicing transactions at a given
service rate
Q: If both the arrival rate and service rate are doubled, whathappens to the mean response time?
11
Example 2: A simple TP server
Consider the same system as above:
...
The arrival rate is 15tps The mean service time per transaction is 60ms The current mean response time is around 350ms
Q: What happens to the mean response time if the arrival rateincreases by 10%?
12
-
8/13/2019 337 Simulation and Modelling
4/35
Example 3: Heathrow airport
There are ve security scanners (X-ray) between the check-in anddepartures lounges at Terminal 4. One of them is broken:
...
BROKEN
DEPATURES LOUNGE
Around 3.8 customers pass through the terminal each second It takes about 30 minutes on average to get through securityQ: How long would it take on average if all 5 scanners were working?
13
Example 4: A central server
Jobs are submitted to a central server
2
3
1
Completions
Arrivals
Disk2
Disk 1
On average, each submitted job makes 121 visits to the CPU, has70 disk 1 accesses and 50 disk 2 accesses
The mean service times are 5 ms for the CPU, 30 ms for disk 1and 27ms for disk 2Q: How would the system response time change if we replace the
CPU with one twice as fast?
14
Example 5: A manufacturing system
A factory has 5 assembly areas
jobs
Queue
QueueType 0
0
3
1
2
4
15
There are three job types, numbered 0, 1 and 2, which occurwith probability 0.3, 0.5 and 0.2 respectively
Jobs arrive at the rate of 4/hr and visit the stations in the order:0 2, 0, 1, 4
1 3, 0, 22 1, 4, 0, 3, 2
The mean time for each job type at each station in visit order is0 0.50, 0.60, 0.85, 0.50
1 1.10, 0.80, 0.75
2 1.10, 0.25, 0.70, 0.90, 1.00
Q: If you were to invest in one extra machine, where would you putit?
16
-
8/13/2019 337 Simulation and Modelling
5/35
There are many techniques one can use to model such systems Simple models involve nothing more than back-of-the-envelope
calculations
The most complex model is a full-blown simulation A tiny taster...
17
Two Simple Experiments with Random Numbers
Example 1: The Birthday Bet
You meet n people at a party youve never met before
You bet one of them that at least two of the n people have thesame birthday (e.g. 5th March) (Assume birthdays are uniformlydistributed and ignore leap years)
Question: How big should n be for your winning chances to be> 50%?
Alternatively, what is the probability , p
n say, that two or more
people in a random group of n people have the same birthday?
18
Under the assumptions of the model, there is an analyticalsolution:
pn = 1 n 1
i =1
365 i365
Amazingly, p22 = 0 .476 and p23 = 0 .507, so the break-even pointis 23
If we couldnt do the math, we could instead simulate thescenario by generating m sets of n random birthdays (randomintegers between 0 and 364) and counting the number of sets cthat contain a duplicate
If the result of each of the m experiments is 0 or 1, then eachoutcome is an observation or estimate of pn , albeit a very badone!
Of course, a better estimate is c/m19
public class birthday {public static void main( String args[] ) {
int n = Integer.parseInt( args[0] ) ;int k = Integer.parseInt( args[1] ) ;i n t b = 0 , c = 0 ;
fo r ( i n t i = 0 ; i < m ; i++ ) {int tot[] = new int[365] ;for ( in t j = 0 ; j < n && to t [b] < 2 ; j++ ) {
b = (int)( Math.random() * 365 ) ;tot[b]++ ; if ( tot[b] == 2 ) c++ ;
}}
System.out.println( (float)c / m ) ;} }
20
-
8/13/2019 337 Simulation and Modelling
6/35
Here are the averages of 5 runs of the program for differentvalues of n and m
m n
5 10 15 20 25 30
100 0.000 0.000 0.200 0.200 0.400 0.200
101 0.000 0.080 0.300 0.460 0.520 0.840
102 0.028 0.100 0.236 0.482 0.580 0.660
103 0.024 0.117 0.250 0.402 0.567 0.716
104 0.028 0.117 0.255 0.414 0.565 0.710
105 0.027 0.117 0.254 0.412 0.569 0.707
For each n there is a noticeable convergence as m increases
21
Lets home in on m = 22, 23 and 24 and look at the 95%condence intervals (see later) for the mean using m = 10 5
m Mean 95% Condence Interval
22 0.476 (0.475,0.478)
23 0.508 (0.506,0.510)24 0.538 (0.537,0.539)
22
Example 2: Come, Friendly Bombs
It is required to drop bombs on a small island that is being usedas an illegal arms stash
Each of 10 bombers will aim one bomb at the centre of theisland (assume normalised to be the origin (0,0))
From a safe height there is a bombing error (due to uctuatingair temperature/density/velocity etc.) which is approximatelynormally distributed with standard deviation 180 m in thehorizontal; similarly 100 m in the vertical
Q: How many bombs will hit the island, on average?
Q: At greater risk, the bombers can y lower and reduce thestandard deviations by 30%. What is the hit rate now?
23
(0,0)
(180,60)
(170,110)
MISS
MISS
HIT
HITBombers
y
x
(280,80)
(140,30)
(180,100)
(40,200)
(10,140)
24
-
8/13/2019 337 Simulation and Modelling
7/35
In general, this cannot be solved analytically we must resort tosimulation
The island will be modelled as a polygon
We will simulate a number, m, of missions and will estimatethe average number of hits per mission The impact point of each bomb is simulated by sampling the two
Normal distributions (details later)
The hit/miss status reduces to a point in polygon test...
25
public class Bombers {static boolean isOnTarget( double x, double y ) {
double[] xs = {-280,10,180,170,40,-180,-140} ;double[] ys = {-80,-140,-60,110,200,100,-30} ;
int ncrosses = 0, n = xs.length - 1 ;for ( int i = 0 ; i < xs.length ; i++ ) {
if ( ( ( ys[i] y && y >= ys[n] ) ) &&
x < xs[i] + ( xs[n] - xs[i] ) * ( y - ys[i] ) /( ys[n] - ys[i] ) )
ncrosses++ ;
n = i ;}return ( ncrosses % 2 == 1 ) ; }
26
public static void main( String args[] ) {int m = Integer.parseInt( args[0] ) ;int hits = 0 ;fo r ( i n t i = 0 ; i < m ; i++ ) {
fo r ( i n t j = 0 ; j < 10 ; j++ ) {
double x = Normal.normal( 0, 180 ) ;double y = Normal.normal( 0, 100 ) ;if ( isOnTarget( x, y ) )
hits++ ;}
}System.out.println( (float)hits / m ) ;
}}
27
Here are the results of 5 runs of the program for differentnumbers of simulated missions ( m):
m Run 1 Run 2 Run 3 Run 4 Run 5
101 5.800 4.900 5.100 5.800 5.500
102 5.110 4.930 5.610 5.330 5.010
103 5.357 5.310 5.326 5.249 5.284
104 5.359 5.319 5.336 5.345 5.374
105 5.352 5.346 5.343 5.340 5.354
The ve results are noticeably more consistent as m increases
28
-
8/13/2019 337 Simulation and Modelling
8/35
This is what happens if the standard deviations are reduced by30% (to 126m and 70m respectively), for 10 5 missions:
m Run 1 Run 2 Run 3 Run 4 Run 5
105 7.679 7.675 7.672 7.676 7.675
By averaging the results for m = 10 5 an estimate of theimprovement in hit rate is (approximately) 44%
29
Some observations so far...
Mathematical models can be really simple Under the given assumptions, mathematical models deliver exact
answers
Mathematical models can only be used in restricted cases Simulation models are extremely exible (just change the code!) Simulation models produce estimates , not exact answers Each run of a simulation model produces a different estimate
The longer we run a simulation the better the estimatesbecome
30
Fundamental Laws
Consider the following:
SystemArrivals Completions
Lets assume we observe the system for time T and let The number of arrivals be A
The number of completions be C
From these we can dene a number of useful performancemeasures and establish relationships between them
31
Some Direct Measures
The Arrival Rate is = A/T The Throughput is = C/T
If the system comprises a single resource whose total busy time is Bthen,
The Utilisation is U = B/T The average Service Demand of each job (or average service
time ) is S = B/C
Note: The net service rate is = 1 /S = C/B
Now some Fundamental Laws (or Operational Laws )...
32
-
8/13/2019 337 Simulation and Modelling
9/35
The Utilisation Law
Since U = B/T = C/T B/C we have:
U =
S Sometimes we work with service rates rather than times , in
which case we have U = /
Importantly, note that U < 1 so we require = 1 /S > Q: What if = ?
33
Littles Law
Suppose we plot ( A C ) over the observation time ( T ):
t1 t2 t4 t11t3 t5 t6 t7 t8 t9 t10 time
1
4
3
2
T
Total area
0
= I
0
AC
Let the accumulated area be I (in request-seconds)
34
The average number of jobs in the system is N = I /T The average time each job spends in the system (the average
waiting time ) is W = I /C
Since I /T = C/T I/C we have:
N = W Note: Assumes ( A C ) is zero at either end of the observation
period, or that is much larger than the residual populations ateither end
35
Littles Law can be applied to any system (and subsystem) inequilibrium, e.g.
...
Clients
CPU
Subservers
36
-
8/13/2019 337 Simulation and Modelling
10/35
The Response Time Law
The special case of a population of users in think/computemode is ubiquitous and has its own law
Let Z be the think time, i.e. the time between completion of one request and the submission of the next N is now the total population of users and the request
submission rate
The average total time for each cycle is W + Z , so from LittlesLaw, N = (W + Z ), or
W = N/ Z 37
The Forced Flow Law
Suppose the system in question comprises a number of resourcesthat a job can visit during its time in the system
Let C k be the number of job completions at, resource k The average number of visits each job makes to resource k is
then V k = C k /C
Rearranging: C k = V k C so, dividing both sides by T ,C k /T = V k C /T , i.e.
k =
V k where k is the throughput of resource k38
The Flow Balance Asuumption
It is often useful to assume that A = C in which case,A/T = C/T , i.e. =
In particular, systems that are in equilibrium (or steady state )must satisfy this property in the long term
Note: If the ow balance assumption does not hold in the longterm (as time ), then the system is fundamentally unstable
Motto: What goes in must come out!
39
Timed State Transition Systems
We now focus attention on modelling systems with state Time is continuous, but the states are assumed to be discrete and
nite, or countably innite, in number
E1 E2 E4t1 t2 t3
E3t4 t5
E5etc.
Times1 s2 s3 s4 s5Initial state s0
State transitions
State holding times
These are called discrete-event systems Note that the state doesnt change between events (transitions)
40
-
8/13/2019 337 Simulation and Modelling
11/35
We need to know the distribution of the time the system spendsin a given state
timeE E
t t
(t) (t)t = t t
Density function
The state holding times might bebased on measurement, or assumed
distributionto have a known mathematical
State s
Measured/assumed distribution
41
In order to understand the key issues, consider a very simpleexample: a single server with a FIFO queue; arrival rate andservice rate :
Population n Population n1 2
... ...
Infinite capacity Infinite capacity
1 2
The simplest way to represent the state of the system is toidentify a state with each queue population (0 , 1, 2..., N ):
0 1
...
...arrival arrival arrival arrival
com plet ion completion completion completion
NN1
Transitions are triggered by events, here job arrival and jobcompletion
42
With no time delays, this is just a Labelled Transition System orLTS, cf FSP. Its not useful for performance analysis!
To add state holding times in a completely general way weassociate clocks with events
aC
C a(set )arrival
aCC c
C a
C ccompletion
(set )C ccompletion
(set )
C a C c(set , )
C a C c(set , )
C aC c
C aC c
C c
...
...
10
arrival arrival
completion
Clock for arrival eventClock for completion event
N1 N(set )arrival
completion
Events that are active in a given state compete to trigger thenext transition, via expiry of their clock
Events may schedule other events by setting their clocks duringthe transition
43
aC
C a(set )arrival
C a
C ccompletion
(set )C ccompletion
(set )
C a C c(set , )
C a C c(set , )
C aC c
C aC c
C c
...
...
10
arrival arrival
completion
N1 N(set )arrival
completion
Clocks run down (to 0) at a state-dependent rate The event whose clock reaches 0 rst in any state triggers the
next transition
A clock setting function sets the clocks for new events that arescheduled during the transition
The clocks of old events, i.e. that are active in both the old andnew states, continue to run down
Events that were active in the old state, but not the new, arecancelled
44
-
8/13/2019 337 Simulation and Modelling
12/35
The Generalised Semi-Markov Process (GSMP)
A formal system that encapsulates this behaviour is theGeneralised Semi-Markov Process ; the components are: A set S of states (nite or countably innite) A set of events E = {e1 ,...,e N } E (s) the set of events schdeuled to occur in state sS p(s ; s, e ) the probability that the next state is s when event
e occurs in state s F (x; s , e , s , e ) the distribution function used to set the clock
for new event e when event e triggers a transition from s to s
r(s, e ) the rate at which the clock for event eE runs downin state s S 0 , F 0 the distribution functions used to assign the initial
state and to set the clocks for all active events in that state.
45
It is important to understand the concept of old , new andcancelled events
0000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000001111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111
000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111
0 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 0
1 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 1
0 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 00 0 0
1 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 11 1 1
000000000111111111 000000000111111111000000000000000000000000000000000000111111111111111111111111111111111111
000000000000000000000000000000000000111111111111111111111111111111111111
E(s) E(s)Old eventsO(s; s, e ) = E(s) (E(s){e})
New events N(s; s, e ) = E(s)(E(s){e
Cancelled events(E(s){e})E(s)
We talk of scheduling new events and descheduling cancelledevents
46
Example: consider the transition from s to s via event e2 below
C 1C 2C 3
C 5
C 4C 3
NewOldCancelled
4(e , e )53(e )
1(e )
s
se
e
e
e
e
e
3
1
2
4
5
3
47
Note: This only allows one event to trigger a transition GSMPsin general allows multiple events to occur simultaneously
Back to the example. We have... S = {0, 1, 2..., N } E =
{a, c
} where a=arrival, c=completion
E (0) = {a}, E (0 < a < N ) = {a, c}, E (N ) = {c} p(s + 1; s, a ) = 1 , p(s 1; s, c) = 1; 0 elsewhere F (x; s ,a ,s ,e ) = F a (x)
F (x; s ,c ,s ,e ) = F c(x)
For all sS , r (s, e ) = 1 for all e in E (s)
S 0 (0) = 1 , S 0 (s = 0) = 0, F 0 (x; a, 0) = F a (x)
48
-
8/13/2019 337 Simulation and Modelling
13/35
The state at time t denes a continuous-time process, X (t) say;formally, this is the GSMP
Note that the clocks in state sS determine how long theprocess remains in state s, prior to the next transition, e.g.
= time of ith transitioni
4
3
2
1
0 Time 1 2 3 4 5 6 7 8 9
X(t) = 3t
49
A sample path of a GSMP is a particular (random) traversal of the transition system
To start it off, we use S 0 to select an initial state sS ; for eachevent e
E (s) use F 0 (x; s, e ) to initialise C e
A sample path is then generated by repeating the following steps:1. Find tnext = min {C e /r (s, e ) | eE (s)} and let e be the
winning event
2. Determine the next state s using p(.; s, e )
3. For each oO(s ; s, e ), reduce C n by tnext r (s, o)
4. For each n
N (s ; s, e ), set C n using F (x; s ,n ,s ,e )
5. Set s = s
50
Example: The innite capacity single-server queue in Java (i.e.as above but with N = )
Assume the inter-arrival times are uniform-random between 0and 1 (i.e. U (0, 1)) and that service times are xed at 0.25...
class ssqClocks2 {public static void main( String args[] ) {
int s, sPrime ;double now = 0.0 ; // Keeps track of timedouble stopTime ;double arrClock = 0.0 ;double compClock = 0.0 ;double stopTime = Double.parseDouble( args[0] ) ;
51
s = 0 ;arrClock = Math.random() ;while ( now < stopTime ) {
i f ( s = = 0 ) {// E(0) = {arrival}
now += arrClock ; // Note: all rates are 1// p(1;0,arrival) = 1sPrime = 1 ;// O(1;0,arrival) = {}// N(1;0,arrival) = {arrival,completion}arrClock = Math.random() ;compClock = 0.25 ;
52
-
8/13/2019 337 Simulation and Modelling
14/35
} else {if ( arrClock < compClock ) { // Arrival event
now += arrClock ;// p(s+1;s,arrival) = 1
sPrime = s + 1 ;// O(s;s,arrival) = {completion}compClock -= arrClock ;// N(s+1;s,arrival) = {arrival}, s>0arrClock = Math.random() ;
53
} else { // Completion eventnow += compClock ;// p(s-1;s,completion) = 1sPrime = s - 1 ;
// O(s;s,completion) = {arrival}, s>0arrClock -= compClock ;// N(s-1;s,completion) = {completion}, s>0// = {}, s=0if ( sPrime > 0 ) {
compClock = 0.25 ; ;}
}}s = sPrime ; }}}
54
The above code is an example of a discrete event simulation With completely general clock setting functions, simulation is the
only way to analyse a GSMP
The code above doesnt accumulate any measures, but we caneasily keep track of, e.g.
The time the system spends in each state
The area under some function of the state (see the exampleunder Littles Law earlier)
The average time between leaving one set of states andentering another
and so on
From these, useful performance measures can be computed
55
Another example: The Machine repair Problem There are N machines in a factory that are subject to periodic
failure
Machines that fail are serviced in fail-time order by a repairer
The individual time-to-breakage ( B ) and repair times ( R) areeach assumed to be independent and identically distributed This can be modelled as a tandem queueing system:
... ...
Total population N
Working machines Broken machines
56
-
8/13/2019 337 Simulation and Modelling
15/35
Because the population ( N ) is xed the state can be describeduniquely by the population of one queue (broken machines, say)
We need only two events: break and repair , say
Let F b(x) = P (B
x) be the distribution function for the time
to breakage for a given machine, and F r (x) = P (R x) be thatfor the repair time
A GSMP for this system is as follows...
57
S = {0, 1,...,N }E = {break , repair }
E (0) = {break }E (N ) = {repair }
E (0 < s < N ) = {break,repair } p(s 1; s, repair) = 1 , 0 < s N p(s + 1; s, break) = 1 , 0 s < N
p(s ; s, e ) = 0 for all other s , s , e
F (x; s , break , s , e ) = F b(x) = P (B x)F (x; s , repair , s , e ) = F r (x) = P (R x)
r (s, e ) = 1 , 0 s N, eE (s)S 0 (0) = 1 , S 0 (s > 0) = 0 , F 0 (x; break , 0) = F b(x)
58
Q: What are the new events, N (s ; s, e ), in each state s whenevent e triggers a transition from state s?
Exercise: sketch the Java code for generating sample paths fromthe GSMP in this case
59
Distribution Sampling
Sample path generation (discrete event simulation) depends onthe ability to sample distributions, e.g. of
Inter-arrival times
Service/repair times Message lengths
Batch size
etc.
E.g. in computing a sample path of a GSMP we need to samplesuch distributions in order to set the clocks
Where possible, we sample from a mathematical distribution, butif this is not possible we must use empirical data
60
-
8/13/2019 337 Simulation and Modelling
16/35
Example Uses of Mathematical Distributions
Exponential Approximates inter-arrival times well in somesystems, e.g. independently arriving jobs/customers
Weibull Fits well time-to-failure of certain components/servicesNormal Often accurate when a time delay is the sum of number
of independent sub-delays, e.g. product assembly (BEWARE of negative observations!)
Gamma Very versatile: can be parameterised to model manynon-negative r.v.s
Cauchy A heavy-tailed distribution; ts well Linux le sizes,for example
Geometric (Discrete) Sometimes used to model (integer) batchsizes
61
Sampling Continuous Distributions
There are a number of methods; most importantly:1. The inverse tranform method
2. The rejection method3. The convolution method
and various special methods for particular distributions (e.g. seetutorial exercise)
62
Short Diversion: Sampling U(0,1)
All distribution samplers assume the ability to generateuniform-random numbers in the interval (0 , 1)
The robust RNGs exploit number theory and are based on theLinear Congruential Generator which generates a sequencex0 , x 1 , x 2 ... via the rule
xn +1 = ( ax n + c) mod m
where a is a multiplier , c is an increment and m is the modulus
Samples from U (0, 1), viz. u0 , u 1 , u 2 ,... are obtained by settingu i = xi /m,i = 0 , 1, 2,... .
Note that 0 x i < m so the maximum period is m An important objective is to maximise the period
63
Multiplicative Congruential Generators
A Multiplicative Congruential Generator (MCG) is obtained bysetting c = 0 in an LCG (but note now that x i must be non-zero)
It can be shown that a multiplicative generator has (maximum)period m
1 if m is prime and if the smallest integer k for which
(ak 1) mod m = 0 is k = m 1 Example: a = 3 , m = 7 whereupon, (only) when k = m 1 = 6,
ak 1 = 728 = 104 7; starting with x 0 = 1, we obtain:x0 = 1 , x 1 = 3 , x 2 = 2 , x 3 = 6 , x 4 = 4 , x 5 = 5
Period =6, x 6 = 1 , x 7 = 3 ...
Javas Math.random() uses an MCG with a 48-bit seed
Modern generators combine several MCGs or generalise theMCG approach e.g. the Mersenne Twister (period 2 19937 1)!
64
-
8/13/2019 337 Simulation and Modelling
17/35
Well assume the ability to generate U (0, 1) samples by anystandard method (well use Javas Math.random() ) and take itfrom there
Recall that a continuous random variable, X say, can becharacterised by its density and/or distribution functions:
P (x < X x+ dx) = f (x)dx F (x) = x f (y)dy = P (X x)
65
1. The (Inverse) Transform Method
Suppose X is a continuous r.v. with cdf F (x) = P (X x) andthat we are trying to sample X
A curious but useful result is that if we dene R = F (X ) thenRU (0, 1); OR... given RU (0, 1) sample X from F
1 (R):
x
F(x)
X
r
R
x
1
Note that F (x) increases monotonically, so:P (X x) = P (F 1 (R) x) = P (R F (x)) = F (x),
66
Algorithm: Sample U (0, 1) giving some value 0 R 1, thencompute F 1 (R)
Of course, this only works if F (x) has an inverse!
Example: U(a,b)
If X U (a, b) thenF (x) =
x aba
, a x b
Setting R = F (x) and inverting F givesX = F 1 (R) = R(ba) + a
This conrms what we (should!) already know: if RU (0, 1),then ( R(ba) + a)U (a, b)
67
Example: exp( )
If X exp() thenF (x) = 1 exp x , x 0
Setting R = F (X ) and inverting, we get:
R = 1 exp X1 R = exp X
loge (1 R) = X loge (1 R)
= X
So, if R
U (0, 1), then
log
e(1
R)/
U (0, 1) (this is alsothe case for loge (R)/ since (1 R)U (0, 1))
68
-
8/13/2019 337 Simulation and Modelling
18/35
2. The Rejection Method
If F (x) cannot be inverted we can sometimes work with thedensity function f (x)
The rejection method is a Monte Carlo algorithm (i.e. basedon random sampling): we enclose f (x) in a box and then throwdarts(!)
f(x)
xa b
m
Y
Y
1
2
X X 1 2(Accept) (Reject)
69
The procedure is as follows:1. Find an a, b and m that bounds all (or most of) f (x)
2. Pick two random samples X U (a, b) and Y U (0, m)3. If the point ( X, Y ) lies beneath the curve for f (x) accept X ;
otherwise reject X and repeat from step 2
Intuitively, the method works because the smaller f (X ) is theless likely you are to accept X
More rigorously, we need to show that the density function forthose values of X that we accept is precisely f (x), i.e. we need toshow that:
P (x < X x + dx | Y < f (X )) = f (x) dx
70
xa + x b x
m
f(x)
X
Y
Using the formula for conditional probability, this becomes:P (x < X x + dx,Y < f (X )) /P (Y < f (X ))
= dx/ (b
a)
f (x)/m
1/ (m(ba))= f (x) dx
71
The efficiency depends on the number of rejections R beforeaccepting a value of X
The probability of accepting X in any one experiment, p say, issimply the ratio of the area of the box to that under the curve,i.e.
p = 1
m(ba) Since each experiment is independent, R is geometrically
distributed:P (R = r ) = p(1 p)r
If f has very long tails, p will be small, although it is possible todivide the x axis into regions and treat each separately
72
-
8/13/2019 337 Simulation and Modelling
19/35
3. The Convolution Method
A number of distributions can be expressed in terms of the(possibly weighted) sum of two or more random variables fromother distributions (The distribution of the sum is the
convolution of the distributions of the individual r.v.s)
Example: Erlang( k, )
A r.v. X Erlang( k, ) is dened as the sum of k r.v.s each withdistribution exp( k)
We can think of X being the time taken to pass through a chainof k servers, each with an exp( k) service time distribution:
k k k
1 2 k
73
Notice thatE [X ] =
1k
+ 1k
+ . . . 1k
= 1
We can generate Erlang( k, ) samples using the sampler for theexponential distribution: if X i
exp( k) then
X =k
i =1X i Erlang( k, )
If R i U (0, 1) then X i is sampled using log R i / (k) We can save the expensive log calculations in the summation by
turning the sum into a product:
X =k
i =1
log R ik
= 1k
logk
i =1R i
74
Sampling Discrete Distributions
All discrete distribution sampling is based on the inversetransform method, either through table look-up or algebraicallyin some cases
We work with the cumulative distribution function F (x), whichfor a discrete r.v. is a step function, e.g.
F(x)
1
0 x
0.39
0.15
0 1 2 3 4 5
0.66
0.81
75
Here, we have:x p(x) F(x)
0 0.15 0.15
1 0.24 0.39
2 0.22 0.61
3 0.15 0.81
4 0.09 1.00
To generate a sample, we drive the table backwards We simply pick a value on the y-axis (a U (0, 1) sample) and then
map this back to an interval on the x-axis
Q This involves a linear-time lookup. Can we do better...?!A Yes! But how...? See the quiz during the tutorial!
76
-
8/13/2019 337 Simulation and Modelling
20/35
Steady State Output Analysis
Usually (but not always) were interested in measuring a systemat equilibrium , or in steady state
A system is in equilibrium if the state probabilites areindependent of time, i.e. for state variable S (t)
P (S (t) = s) = ps (t) ps as t
P(s(t) = s2 )
P(s(t) = s1 )
P(s(t) = s3 )
1
23
p
pp
Transient
Somewhere here
Probability
Equilibriumtime
77
To estimate equilibrium behaviour we must ignore thepost-initialisation (warm-up) transient as it may introduce bias
We must start any measurement (or reset ongoing measurement)at the end of the transient period
Note: this simply means that the state probabilities areapproximately those at equilibrium the state on an individualsample path at that time may assume any value
In general, we can only work out the approximate length of thewarm-up transient by doing pilot runs, e.g.
Plot running mean or moving average over one run
Plot measures having discarded p% of the initial observations Plot means/distributions of n th observation of many runs
78
Condence Intervals
Suppose we have n independent, identically-distributed (iid)observations X i , 1 i n each with mean and variance 2
Wed like to compute a point estimate for based on the X i thats easy:
X = 1n
n
i =1X i
Wed also like a measure of condence in this estimate We seek two numbers, a, b say, for which we can state:
P (a b) = pfor some probability p, e.g. 0.9, 0.95...
This is called a condence interval and is usually symmetricabout X , i.e. (a, b) = X h where h is the half-width
79
The Central Limit Theorem tells us that the sample mean of theX i approaches the N (, 2 /n ) distribution as n Normalising,
X N (,
2 /n )
X
2 /n N (0, 1) as n
Because we know the cdf of N (0, 1) we can easily locate twopoints z and z such that
P (z < X
2 /n z) = 1
for any given
z is messy to compute, so particular values have been tabulated(see handouts)
80
-
8/13/2019 337 Simulation and Modelling
21/35
Rearranging...P X
z n < X +
z n = 1
If we know we can nd X
z/ n by looking up z in tables of
N (0, 1)
/ 2 / 2
0z z
This is ne provided n is sufficiently large We can replace by S (sample standard deviation), again
provided n is sufficiently large
81
Q What does sufficiently large mean?
A It depends on the distribution of the X i
However, key fact: it can be shown that if the X i , 1 i n, arethemselves normally distributed then
X
S 2 /nhas the Students t distribution with parameter n 1 (degreesof freedom)
Provided the X i are normally distributed and independent, anexact 100(1
)% condence interval for the mean ( ) is
X tn 1 ,1 / 2 S
n n 2, tn 1 ,1 / 2 from tables
82
Example: Suppose the observations 1.20, 1.50, 1.68, 1.89, 0.95,1.49, 1.58, 1.55, 0.50, 1.09 are samples from a normal distributionwith unknown mean . Construct a 90% condence interval for
The sample mean is
X = 110
10
i =1X i = 1 .34
where X i is the i th observation
The sample variance is
S 2 = 1n 1
n
i =1(X i X )
2 = 0 .17
so S = 0 .41
83
From tables of the Students t distribution , t 9 ,0 .95 = 1 .83 so the90% condence interval is
X 1.83 0.41 10 = 1 .34 0.24
In the context of a simulation, how do we ensure in general thatour observations are a. independent and b. approximatelynormally distributed?
If the observations come from independent runs of thesimulation, then they will be independent
If the observations are themselves internally-computedpopulation means then they will be approximately normally
distributed (Central Limit Theorem) problem solved!
But what if theyre not?!
84
-
8/13/2019 337 Simulation and Modelling
22/35
Batched Means
A popular general approach seeks to achieve approximatenormality and independence simultaneously
Idea: Run the model once and divide the post-warm-up periodinto n batches (typically 10 n 30) where batch i computesthe average of m estimates Y i, 1 ,...,Y i,m
Compute X i = 1 j m Y i,j , i = 1 ,...,n Provided m is reasonably large, the X i will (hopefully) be
approximately normal and independent
...
Batc o servations
m individual observationsor state changes
1X X 2 3X nXTransient0
End SimulationReset measures
85
Independence
Independent replications guarantees independent observations atthe expense of a warm-up transient at the start of each run
The batched means method involves a single run and a singlewarm-up transient, but the observations might now be dependent(why?)
If the observations are dependent then the formula for the samplevariance S 2 will be wrong because the covariances are ignored
Consequence: The condence interval will be too narrow
86
Recall, covariance measures the dependence between two r.v.s For r.v.s X and Y with means X and Y , and variances 2X and
2Y respectively
COV (X, Y ) = = E ([X X ][Y Y ])= E (XY ) X Y
Note that covariance may be positive (positive correlation),negative (negative correlation) or zero (uncorrelated, whichimplies the r.v.s are independent)
Note thatCOV (X, X ) = E ([X X ]
2 ) = V AR(X )
87
Recall also,V AR(X + Y ) = E [((X + Y ) (X + Y ))
2 ]
= E [((X X ) + ( Y Y ))2 ]
= E [(X X )2 ] + E [(Y Y )
2 ]
+ 2 E [((X X )(Y Y ))]= 2X + 2Y + 2 COV (X, Y )
Of course, if X and Y are independent then C OV (X, Y ) = 0 andV AR(X + Y ) = 2X +
2Y
88
-
8/13/2019 337 Simulation and Modelling
23/35
To obtain our condence interval we assumed thatV AR(X ) = 2 /n , but if the X i , 1 i n are dependent then
V AR(X ) = V AR(1n
n
i =1X i )
= 1
n 2V AR(
n
i =1X i )
= 1
n 2E ([(
n
i =1X i ) n]
2 )
= 1
n 2E ([
n
i =1(X i )]
2 )
= 2
n +
1n 2
2n 1
i =1
n
j = i +1Cov( X i , X j )
89
The bottom line: Covariances are typically positive so if weignore them altogether S 2 /n becomes an under-estimate of V AR(X ) and the condence intervals will be too narrow
90
State Space Coverage
For any discrete-event model consider the underlying statetransition system
...
Statetransition(Event)
State space
The accuracy (consistency) of a measure derived directly, orindirectly, from the (equilibrium) state probabilities is determinedby the average number of times the simulation visits each state
91
Many visits high accuracy; few visits low accuracy
...
Parameterisation 1: Simulation time Parameterisation 2: Simulation timespent in a small number of states spent covering a large number of states
...
State with equilibrium probability >
For the same simulator execution time we would expect narrowercondence intervals from the model on the left than the one onthe right
92
-
8/13/2019 337 Simulation and Modelling
24/35
Markov Processes
Note that the future history of a GSMP is determined entirely bythe current state
However, note that the current state includes clock settings thatare history dependent, e.g.:
C k
C k (set )
C k (set )
C k (set )s
e1
e2
e3
In general, the value of clock C k depends on how we entered thestate
93
Now... suppose that when entering state s ,1. Each transition into s initialises the clocks of the new events
in e E (s ) using the same distribution F (x; e ), i.e.
independently of how the state was entered
2. All clocks are set according to an exponential dsitribution, i.e.
F (x; e ) = 1 e rxfor some parameter r that depends only on e
The exponential distribution is memoryless , in that the future isindependent of the past, i.e. if X exp(r )
P (t < X t + s | X > t ) = P (X s) s, t 0
94
With the above assumptions the GSMP now assumes a verymuch simpler form:
1. All occurrences of event e are associated with the samedistribution, hence the same distribution parameter
2. There is no need to remember the time spent in any previous
state(s), e.g. throught the use of clocks (memorylessness)3. In state s we simply race the distribution samplers
associated with eE (s) and choose the event with thesmallest time
4. Transitions need only be labelled with the associated (rate)parameter, e.g. for our queue:
c0 1...
...
c1
95
This much simpler process is called a Markov Process Markov Processes are easily analysed by discrete-event
simulation (Exercise: sketch the algorithm)
Crucially, however, they can be analysed Numerically, provided the state space is nite
Analytically, in some special cases
provided the process is irreducible : every state can be reachedfrom any other
96
-
8/13/2019 337 Simulation and Modelling
25/35
Numerical Solution Methods (Equilbrium)
Let the state space be S and ps (t) be P (S (t) = s) where S (t)S is the state at time t
Let q
s,s be the transition rate from state s
S to states S, s
= s
At equilibrium, the process is time homogeneous : ps (t + ) = ps (t) = ps , say
It can be shown that every nite, irreducible, time-homogeneousMarkov process has a unique equilibrium probability distribution
ps , sS , which is also limt ps (t)
97
At equilibrium, the probability uxes (average number of transitions per unit time) into, and out of, each state must be inbalance, i.e. for each state sS
pss S,s = s
q s,s =s S,s = s
ps q s ,s
These (linear) ux equations are called the global balance equations and are subject to the normalising equation
sS ps = 1
98
Example:
s
q
s
ss
s,sq s,ss,s
q
q
s,s
The ux out is ps (q s,s + q s,s ); the ux in is ps q s ,s + ps q s ,s Thus, at equilibrium:
ps (q s,s + q s,s ) = ps q s ,s + ps q s ,s
We can use standard linear solvers to nd ps for any state s ,given the transition rates q s,s , s , s S
99
The problem is usually dened in matrix form, viz. the solutionto p Q = 0 where p = ( ps 1 , ps 2 ,...,p s N ), S = {s1 , s 2 ,...,s N } is thestate space, and Q is the Generator Matrix
Q =
q 1 q s 1 ,s 2 q s 1 ,s 3 . .. q s 1 ,s N q s 2 ,s 1 q 2 q s 2 ,s 3 . .. q s 2 ,s N
...
q s N ,s 1 q s N ,s 2 q s N ,s 3 ... q N
The diagonal terms q i , s i S encode the net output rate fromstate i in the balance equations:
q i = s j S,j = i
q s i ,s j
100
-
8/13/2019 337 Simulation and Modelling
26/35
For example, consider p applied to the rst column: ps 1 q 1 + ps 2 q s 2 ,s 1 + ... + ps N q s N ,s 1 = 0
which is the balance equation for state s 1
As an example, consider our single-server queue (the M/M/1/cqueue), state space {0, 1,...,c}
Q =
0 0 ... 0 ( + ) 0 ... 00 ( + ) ... 0...
...
Recall: is the service rate ; 1 is the mean service time , S say
101
Note that Q is singular and there are innitely many solutions topQ = 0 as written
In order to solve for the equilibrium distribution p it is necessaryencode the normalising condition:
sS ps = 1
Simple: pick a column, j , set all its elements to 1, and likewisethe j th element of the 0 vector, e.g. in our example we mightsolve pQ = 1 c , or
p
0 0 ... 1 ( + ) 0 ... 10 ( + ) ... 1...
... 1
= (0 , 0, ..., 1)
Now choose your favourite solver and click go!102
Analytical Solution Methods
For Markov processes with the right structure direct analyticalsolutions to the system of equations p Q = 0 can be obtained
Our M/M/1/c queue is an example; well consider the casec =
(the standard M/M/1 queue), although there is a
solution for nite c
The balance equations are:p 0 = p1
( + ) pi = pi 1 + pi +1 , i > 0
By inspection, the (unique) solution is pn = n p0 , where =
103
p0 is found from the normalising equation:n =0 pn =
n =0
n p0 = 1
Rearranging... p0 =
n =0n
1
= 1
Notice, importantly, that the sum only converges if < 1 i.e. < ; hence the case = has no solution (the system isunstable )
Putting this together, we obtain:
pn = (1
) n , n
0
104
-
8/13/2019 337 Simulation and Modelling
27/35
Performance Measures for the M/M/1 Queue
Throughput,
We can use the above result to determine the throughput : = p0 0 + (1 p0 ) = =
Server utilisation, U
The server is idle when n = 0; busy otherwiseU = 1
Pr
{ The server is idle
}= 1 p0 = 1 (1 )= =
= S
105
Mean queue length, N
Recall the denition of the mean queue length:N =
n =0npn
The n in the summation is ddly, but notice that:nn =
dd
n
Hence:N =
n =0
npn = (1 )
n =0
nn
= (1 ) dd
n =0n =
1
106
Mean Response ( Waiting) Time, W
Recall: the mean response time is the mean time that a jobspends in the system (queueing time + service time)
The easiest way to nd W is to use Littles Law
N = W = W Thus
W = N/
= (1 )
= 1
107
Mean Queueing Time
The time spent waiting to go into service ( W Q say) is easilycomputed once we know W :
W Q = W 1
=
Note: If a customer is removed from the queue before it goes intoservice then Littles Law applied to W Q delivers the meannumber of customers waiting to be served:
N Q = W Q
= 2
1
108
-
8/13/2019 337 Simulation and Modelling
28/35
Some Examples
U N W
2 4 2 1/ 2 1 1/ 2
2 5 2 2/ 5 2/ 3 1/ 32 10 2 1/ 5 1/ 4 1/ 8
3 4 3 3/ 4 3 1
5 10 5 1/ 2 1 1/ 5
8 12 8 2/ 3 2 1/ 4
Compare these with results from the GSMP simulation
109
More than one Queue
Consider two queues in tandem:Population n Population n1 2
... ...
Infinite capacity Infinite capacity
1 2
Note: the arrival rate (throughput) is the same for both queues
Lets proceed as before - the state this time is the population of both queue 1 ( n 1 say) and queue 2 (n 2 say), i.e. a pair ( n1 , n 2 )
The queue length vector random variable is ( N 1 , N 2 ) and wellwrite pn 1 ,n 2 = P (N 1 = n1 , N 2 = n2 ) at equilibrium
110
Because the state is a pair (of queue populations) the statetransition diagram is now two dimensional:
1
1 1
2 2 2
2 2
2
0,0
0,11,0
1,1 0,2
2,0
111
Now a small problem: no closed contour gives us an immediatelysolvable balance equation, e.g. the dotted box:
p 0 ,0 = 2 p0 ,1
or the solid box:
( + 1 ) p2 ,0 = p1 ,0 + 2 p2 ,1
We can, however, come up with four equations which cover allstates and transitions. For n 1 , n 2 > 0:
p 0 ,0 = 2 p0 ,1
( + 1 ) pn 1 ,0 = pn 1 1 ,0 + 2 pn 1 ,1
( + 2 ) p0 ,n 2 = 1 p1 ,n 2 1 + 2 p0 ,n 2 +1
( + 1 + 2 ) pn 1 ,n 2 = pn 1 1 ,n 2 + 1 pn 1 +1 ,n 2 1 + 2 pn 1 ,n 2 +1
112
-
8/13/2019 337 Simulation and Modelling
29/35
One way to proceed is to guess a solution! Lets try: pn 1 ,n 2 = n 11 n 22 p0 ,0
where 1 = / 1 , 2 = / 2
We can test it by substitution into the balance equations: 01
02 p0 ,0 = 2
01
12 p0 ,0
by p0 ,0 =
( + 1 ) n 11 02 p0 ,0 = n 1
11
02 p0 ,0 + 2 n 11
12 p0 ,0
by n 11 p0 ,0 + 1 = / 1 + 2 2 = 1 +
and so on for the other cases (check them out!)
113
So it is a solution, and its unique! We nd p0 ,0 again using the fact the probabilities sum to 1:
n 1 , n 2
n 1 , n 2 0
pn 1 ,n 2 =n 1 , n 2
n 1 , n 2 0
n 11 n 22 p0 ,0 = 1
Hence
p0 ,0 =
n 1 =0
n 2 =0n 11 n
2
2
1
=
n 1 =0n 11
1
n 2 =0n 22
1
= (1 1 )(1 2 )
114
Incredibly, we arrive at:
pn 1 ,n 2 = (1 1 ) n 11 (1 2 ) n 22 , n1 , n 2 0
So, the joint probability (of being in state ( n 1 , n 2 ) is the productof the marginals (the probability of the rst queue being in staten 1 and similarly the second)
This is an example of the Product Form result which applies to anarbitrary queueing network, provided the initial assumptions hold
An extraordinary consequence of this is that each queue nowoperates as if it were an M/M/1 queue with an independentPoisson arrival stream
115
In particular, the M/M/1 queue results apply to each node inisolation, hence, for example:
The utilisations are U 1 = 1 and U 2 = 2 The mean population of queue 2 is
2
1 2 The mean time spent in queue 1 is1
2 The probability that queue 2 contains exactly 4 customers is
p(N 2 = 4) = (1 2 )42
and so on...Q: What about arbitrary networks? More later...
116
d h
-
8/13/2019 337 Simulation and Modelling
30/35
Part II: High-level Modelling Tools
GSMPs are a neat way to describe general discrete-event systems BUT - they are low level and hard to get right
Markov processes provide an elegant way to formulate and solvemathematically tractable discrete-event systems BUT - they are even lower level than GSMPs and hard to get
right
The same applies to other transition systems we havent seen yet(e.g. SMPs, STAs...)
In practice wed like high-level formalisms/tools that correspondto, or are directly translated into, these formal state transitionsystems
117
Some Targeted Approches
1. Discrete-event simulation languages/APIs
GPSS, Simula, Simscript, SimC++, SimPy, JINQS...
2. Markovian Stochastic Petri Nets Mobius, PRISM, DNAmaca...
3. Markovian Process Algebras
PEPA, EMPA, TIPP, SFSP...4. Generalised/extended Stochastic Process Algebras
SPADES, EMPA blah , SPADES(!), MoDeST...5. Queueing Networks
Athene, QNET, QNAT,...
118
1. Tools for Discrete-event Simulation
These all provide abstractions for encoding GSMP-likeoperations at a high level, e.g. for
Managing simulated (virtual) time
Dening and scheduling events
Measurement and analysis
Meaurement is typically built in to supporting libraries/classes,e.g. for modelling resources, queues
Explicit measurement classes are also made available, e.g. tocompute explicitly means, variances, bar charts...
Output analysis may support e.g. independent replications,batch-meanand calculation of condence intervals
119
In a GSMP the current state is dened by the value(s) of program variable(s), e.g. class instance variables
The set of states is implicitly dened in terms of these statevariables
New events in state s , N (s ; s, e ), are created by explicitly
scheduling them during the transition from s to s
Event scheduling involves sampling the appropriate clock settingfunction (distribution sampling)
Cancelled events in state s , K (s ; s, e ) say, are removed bydescheduling them during the transition from s to s
Probabilistic choice of next state is achieved by sampling aU (0, 1), i.e. via a RNG
120
A i l l ( h JINQS API) E l Th Si l Q ( )
-
8/13/2019 337 Simulation and Modelling
31/35
A simple example (the JINQS API)... now() delivers the current virtual time ( double )
schedule( e ) adds event e to an event set (aka calendar queue, event diary, future event list...)
deschedule( e ) removes event e from the event set simulate() invokes events in time order and advances time
Events are class instances, with associated code ( public voidinvoke() {... }) for effecting a state transition andscheduling/descheduling events
All events have an invocation time a superclass instancevariable
The event code models a transition in some underlying GSMP
121
Example: The Single-server Queue (no measures)
The state is the queue population ( int ) stop is an abstract (virtual) method in superclass Sim that
controls termination
import tools.* ;
class SSQSim extends Sim {in t n = 0 ;
public boolean stop() {return now() > 100000.0 ;
}
122
One arrival schedules the next. In state 1, we set the clock forthe completion event, as in the GSMP...
class Arrival extends Event {public Arrival( double t ) {
super( t ) ;}public void invoke() {
schedule( new Arrival( now() + Math.random() ) ) ;n++ ;if ( n == 1 )
schedule( new Completion( now() + 0.25 ) ) ;
}}
123
The code for the completion event mirrors the equivalentGSMP...
class Completion extends Event {public Completion( double t ) {
super( t ) ;}public void invoke() {
n-- ;if ( n > 0 )
schedule( new Completion( now() + 0.25 ) ) ;}
}
124
The initial state is 0 (w p 1 in the GSMP); the only active Application: The Simple Computer Model
-
8/13/2019 337 Simulation and Modelling
32/35
The initial state is 0 (w.p. 1 in the GSMP); the only activeevent in state 0 is Arrival ...
public SSQSim() {schedule( new Arrival( now() + Math.random() ) ) ;execute() ;
}}
public class ssq1Ev {public static void main( String args[] ) {
new SSQSim() ;}
}
125
Application: The Simple Computer Model
Jobs are submitted to a job queue for execution by a CPU There are periodic page faults which are serviced by one of two
disks
Whilst a fault is being serviced the CPU switches to the next jobin the job queue; once serviced, the job re-enters the back of the job queue
2
3
1
Completions
Arrivals
Disk2
Disk 1
126
From careful observation it has been established that: Each submitted job makes 121 visits to the CPU, has 70 page
faults serviced by disk 1 and 50 by disk 2 on average
The mean service times are 0.005s for the CPU, 0.03s for disk1 and 0.027s for disk 2
The current arrival rate of jobs = 0.1/ s
Note: the CPU mean service time is the mean time a job spendsat the CPU (before leaving or page-faulting)
Q: How does the system response time ( W ) vary as the loadincreases?
For illustration purposes, well assume all time delays areexponentially distributed (this is easily changed)
127
The state of the underlying GSMP is the population of each of the three queues (( c,m,n ) say)
Here well use explicit Queues; each entry is a job, representedby its arrival time
Events: Arrival new job arrival
StopJob exit CPU
Resume( n, ... ) exit disk n
We need four distribution samplers for setting clocks:inter-arrival time, cpu time slice and two disk (page fault) servicetimes
Well measure response time W using a CustomerMeasure
128
i l * The arrival event ( Arrive ) generates the next arrival places the
-
8/13/2019 337 Simulation and Modelling
33/35
import tools.* ;
class CPUSim extends Sim {Queue cpuQ = new Queue(),
diskQ[] = { new Queue(), new Queue() } ;Exp iaTime,sTime[] = { new Exp( 1000.0/30 ),
new Exp( 1000.0/27 ) },xTime = new Exp( 1000.0/5 ) ;
CustomerMeasure respTime = new CustomerMeasure() ;
int completions = 0 ;int stopCount = 100000000 ;
129
The arrival event ( Arrive ) generates the next arrival, places thenew job in the job queue ( cpuQ) and starts the CPU if it was idle(state (0 ,m,n ) in the GSMP)
Event StopJob may exit the job or pass it to one of thediskstransition from ( c,m,n ) to either ( c 1,m,n ) w.p. 1/121,(c 1, m + 1 , n ) w.p. 70/121, or ( c,m,n + 1) w.p. 50/121
In states ( c, 0, n ), (c,m, 0), c,m, n 0 we need to schedule aResume event at the corresponding disk
On exit from a server the next job in the job queue is started, if there is one
Well build in an EndOfWarmUp event to allow us to deletetransient measures
130
class Arrival extends Event {public Arrival( double t ) {
super( t ) ;}public void invoke() {
schedule( new Arrival( now() + iaTime.next() ) ) ;cpuQ.enqueue( new Double( now() ) ) ;if ( cpuQ.queueLength() == 1 )
schedule( new StopJob( now() + xTime.next() ) ) ;}
}
131
class StopJob extends Event {public StopJob( double t ) {
super( t ) ;}public void invoke() {
Double t = (Double) cpuQ.dequeue() ;if ( Math.random()
-
8/13/2019 337 Simulation and Modelling
34/35
// StopJob continued...else {
int i = (int) ( Math.random() + 50.0/120 ) ;diskQ[i].enqueue( t ) ;
if ( diskQ[i].queueLength() == 1 )schedule( new Resume( i, now() + sTime[i].next() ) ) ;}if ( cpuQ.queueLength() > 0 )
schedule( new StopJob( now() + xTime.next() ) ) ;}
}
133
class Resume extends Event {int d ;public Resume( int disk, double t ) {
super( t ) ;
d = disk ;}public void invoke() {
Double t = (Double) diskQ[d].dequeue() ;cpuQ.enqueue( t ) ;if ( cpuQ.queueLength() == 1 )
schedule( new StopJob( now() + xTime.next() ) ) ;if ( diskQ[d].queueLength() > 0 )
schedule( new Resume( d, now() + sTime[d].next() ) ) ;} }
134
class EndOfWarmUp extends Event {public EndOfWarmUp( double t ) {
super( t ) ;}
public void invoke() {respTime.resetMeasures() ;completions = 0 ;stopCount = 5000 ; // Whatever...!
}}
135
public boolean stop() {return completions == 3000 ;
}public CPUSim( double lambda ) {
iaTime = new Exp( lambda ) ;schedule( new Arrival( now() + iaTime.next() ) ) ;schedule( new EndOfWarmUp( now() + 15000 ) ) ; // Whatever!simulate() ;System.out.println( respTime.mean() ) ;
}}
136
Some Results Now lets up the load to = 0 .4...
-
8/13/2019 337 Simulation and Modelling
35/35
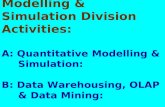
Here are three example time series plots for the mean waitingtime (moving average) when = 0 .15:
CPU model - disk 1 mean queue length for =0.15(three trial runs)
0
2
4
6
8
10
12
14
16
0 4000 8000 12000 16000 20000 24000 28000
Time
M e a n
W a i
t i n g
T i m e ,
W
It looks as if the system is approaching equilibrium after around15000 time units
137
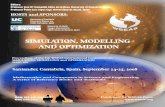
pCPU model - disk 1 mean queue length for =0.4
(three trial runs)
0
5
10
15
20
25
30
0 4 000 80 00 12000 16000 20000 24000 28000
Time
M e a n W a i
t i n g
T i m e ,
W
As increases the system takes longer to reach equilibrium(why?)
An an example, wed expect measurements taken between 15000and 30000 time units, say, to have wider condence intervals for = 0 .4 than for = 0 .15. Lets see...
138
W (exact) Point Estimate 90% Condence Interval
(10 independent replications)
0.1 4.86 4.839 (4.776, 4.902)
0.15 5.42 5.267 (5.044, 5.490)
0.20 6.16 6.198 (5.790, 6.607)
0.25 7.17 6.679 (6.158, 7.199)
0.30 8.68 8.662 (7.784, 9.541)
0.35 11.25 11.726 (10.767, 12.685)
0.40 16.86 16.295 (12.297, 20.293)
0.45 42.45 30.765 (18.621, 42.909)
Q: Whats going on? Q: Where did the exact results come from?
139