
Nonoverlap of the Star Unfolding Boris Aronov and Joseph O’Rourke, 1991 A Summary by Brendan...
26
Nonoverlap of the Star Unfolding Boris Aronov and Joseph O’Rourke, 1991 A Summary by Brendan Lucier, 2004
-
Upload
charity-anthony -
Category
Documents
-
view
214 -
download
0
Transcript of Nonoverlap of the Star Unfolding Boris Aronov and Joseph O’Rourke, 1991 A Summary by Brendan...
Nonoverlap of the Star Unfolding
Boris Aronov and Joseph O’Rourke, 1991
A Summary by Brendan Lucier, 2004
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
Introduction – What is this paper about, and why do I like it? It is a mathematics paper with algorithmic
consequencesProves theorems and shows how they simplify
existing algorithms Single-source shortest path queries (Chen and
Han, 1990) Finding edge sequences for shortest paths (Sharir
and Schorr, 1986) Computing geodesic diameter of a polyhedron
(Agarwal, Aronov, O’Rourke, and Schevon, 1990)
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
Shortest Paths on a Polyhedron
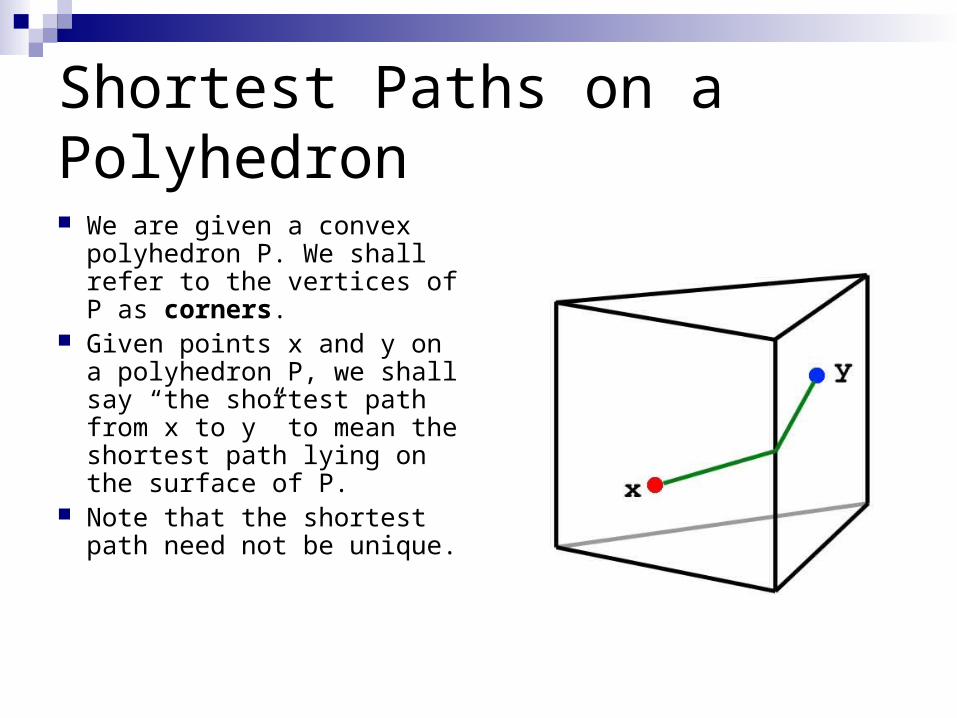
We are given a convex polyhedron P. We shall refer to the vertices of P as corners.
Given points x and y on a polyhedron P, we shall say “the shortest path from x to y” to mean the shortest path lying on the surface of P.
Note that the shortest path need not be unique.
Ridge Trees
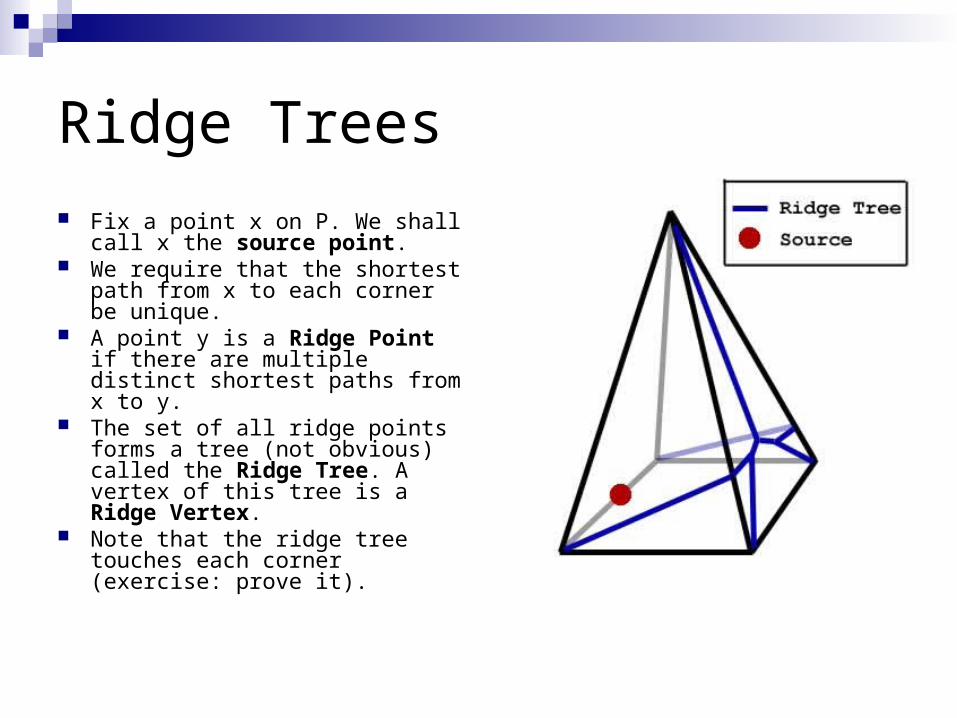
Fix a point x on P. We shall call x the source point.
We require that the shortest path from x to each corner be unique.
A point y is a Ridge Point if there are multiple distinct shortest paths from x to y.
The set of all ridge points forms a tree (not obvious) called the Ridge Tree. A vertex of this tree is a Ridge Vertex.
Note that the ridge tree touches each corner (exercise: prove it).
The Star Unfolding
Take a convex polyhedron P with n corners. Choose a point x on P with a unique shortest path to
each corner of P. Cut P along the shortest paths from x to each corner.
Note that there will be n cuts. Unfold the polyhedron into the plane. This is a Star Unfolding Sx of P.
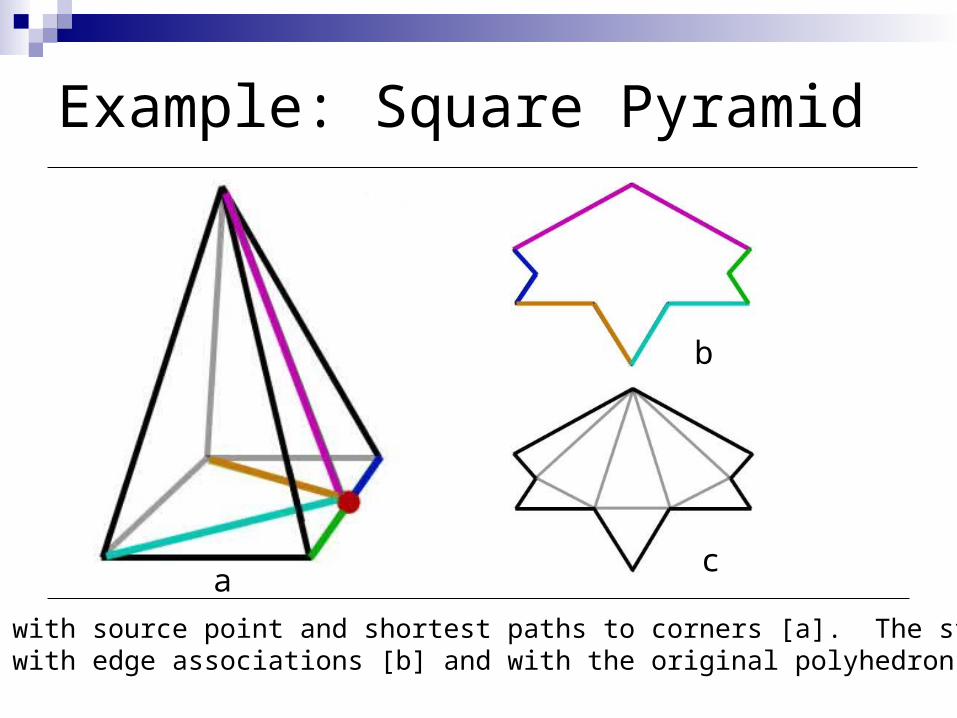
Example: Square Pyramid
A pyramid with source point and shortest paths to corners [a]. The star unfolding with edge associations [b] and with the original polyhedron edges [c].
a
b
c
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
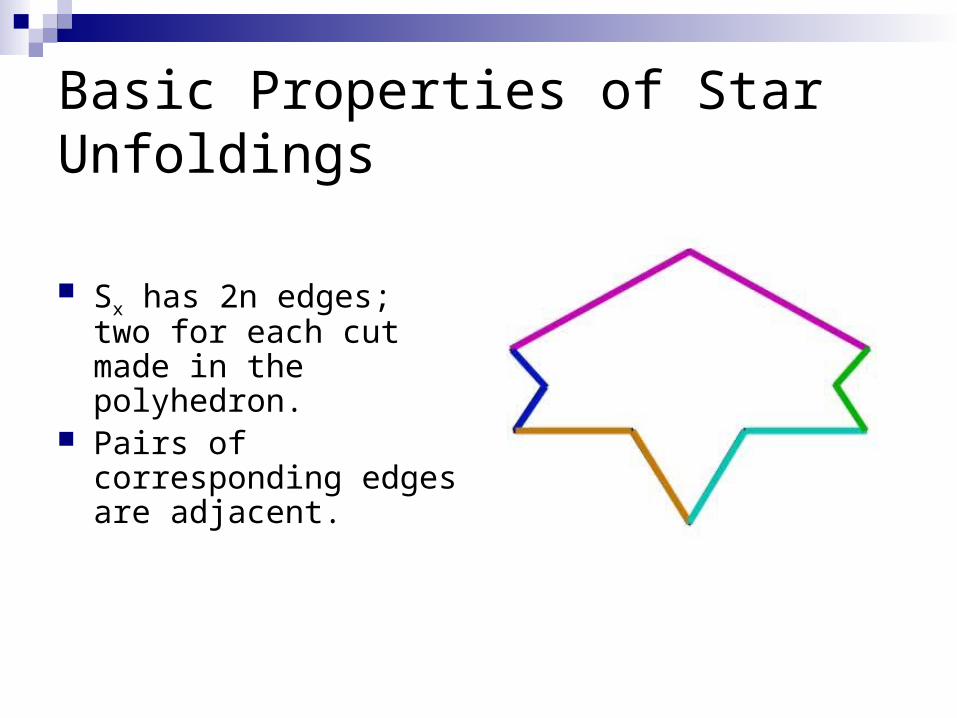
Basic Properties of Star Unfoldings
Sx has 2n edges; two for each cut made in the polyhedron.
Pairs of corresponding edges are adjacent.
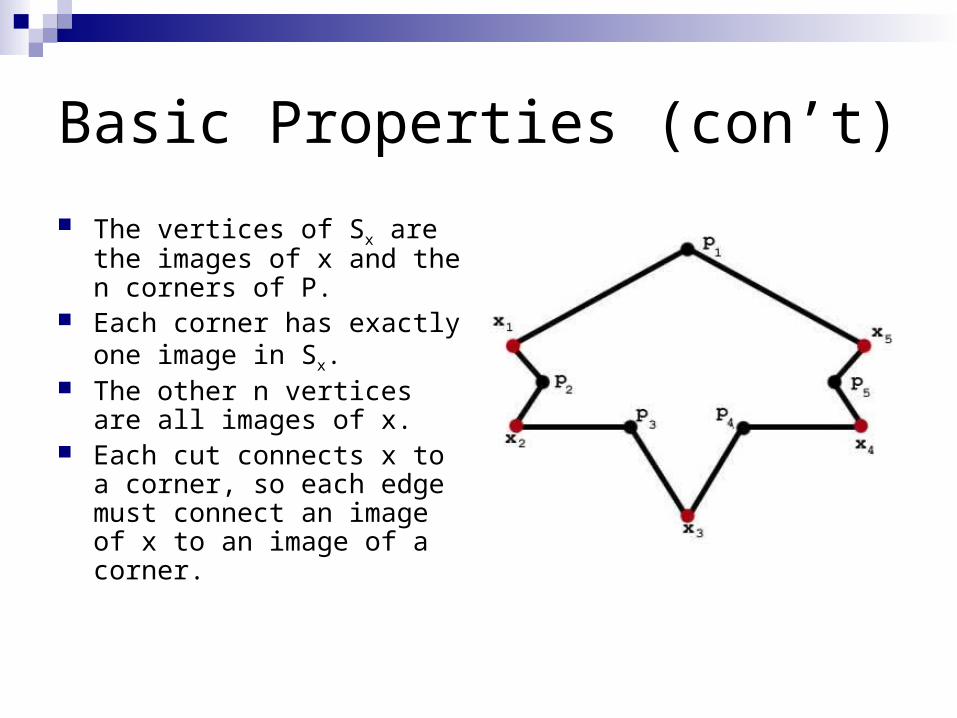
Basic Properties (con’t)
The vertices of Sx are the images of x and the n corners of P.
Each corner has exactly one image in Sx.
The other n vertices are all images of x.
Each cut connects x to a corner, so each edge must connect an image of x to an image of a corner.
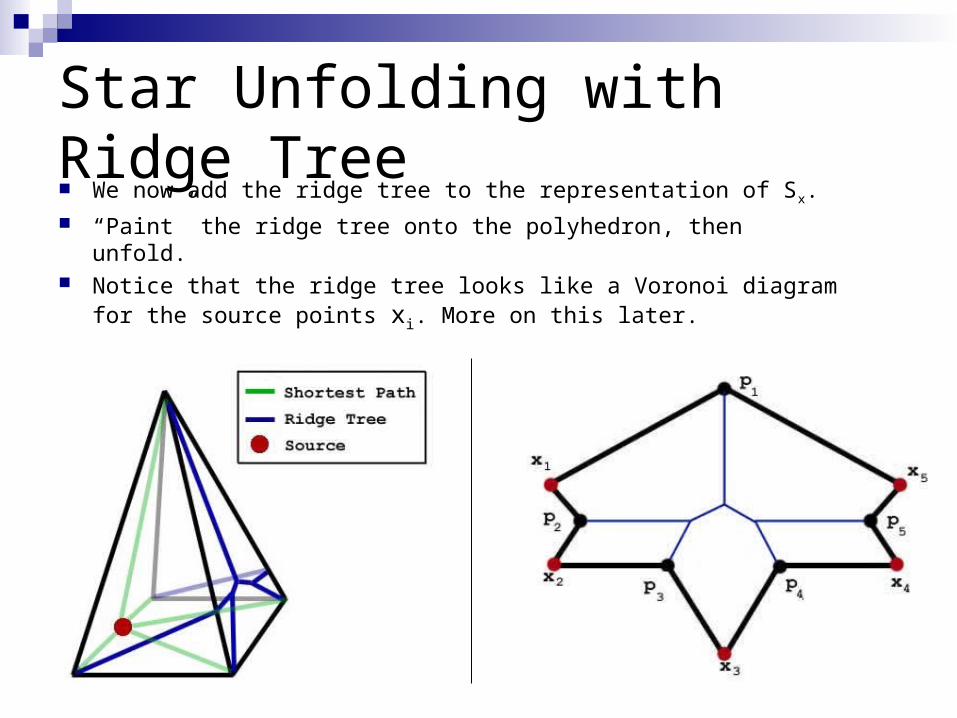
Star Unfolding with Ridge Tree We now add the ridge tree to the representation of Sx. “Paint” the ridge tree onto the polyhedron, then unfold. Notice that the ridge tree looks like a Voronoi diagram for the source
points xi. More on this later.
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
Outline of Main Theorem
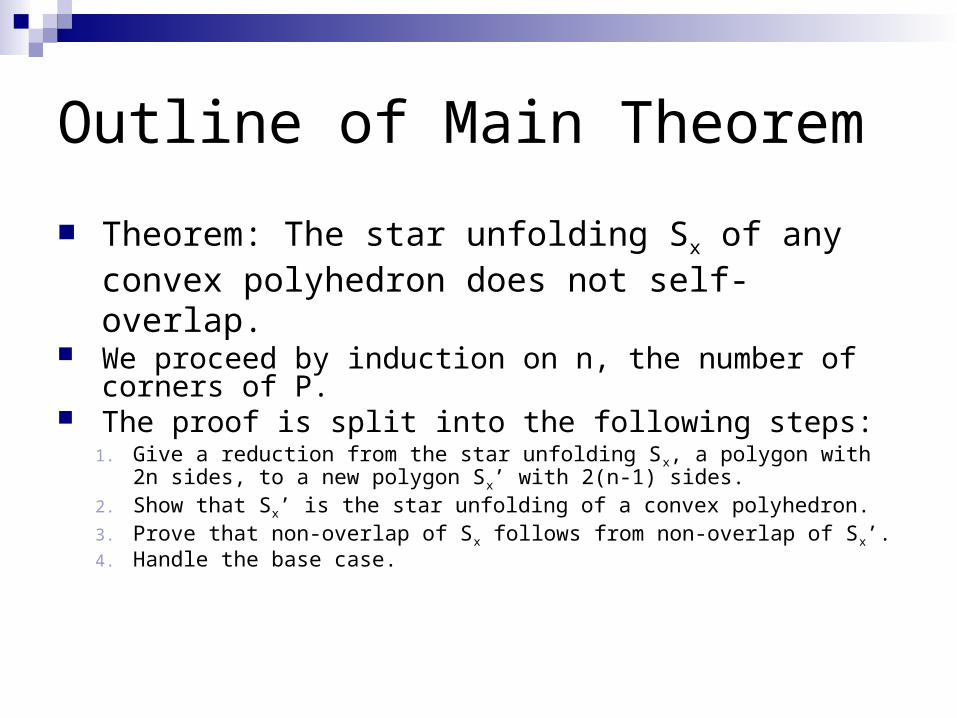
Theorem: The star unfolding Sx of any convex polyhedron does not self-overlap.
We proceed by induction on n, the number of corners of P.
The proof is split into the following steps:1. Give a reduction from the star unfolding Sx, a polygon with 2n
sides, to a new polygon Sx’ with 2(n-1) sides.2. Show that Sx’ is the star unfolding of a convex polyhedron.3. Prove that non-overlap of Sx follows from non-overlap of Sx’.4. Handle the base case.
Step 1: The Reduction
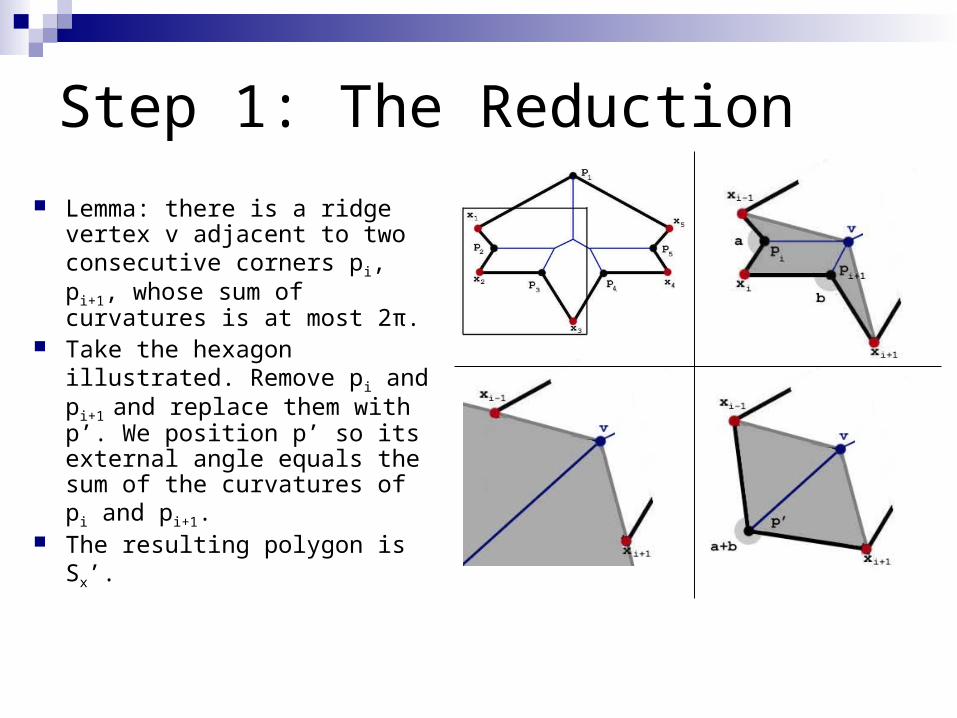
Lemma: there is a ridge vertex v adjacent to two consecutive corners pi, pi+1, whose sum of curvatures is at most 2π.
Take the hexagon illustrated. Remove pi and pi+1 and replace them with p’. We position p’ so its external angle equals the sum of the curvatures of pi and pi+1.
The resulting polygon is Sx’.
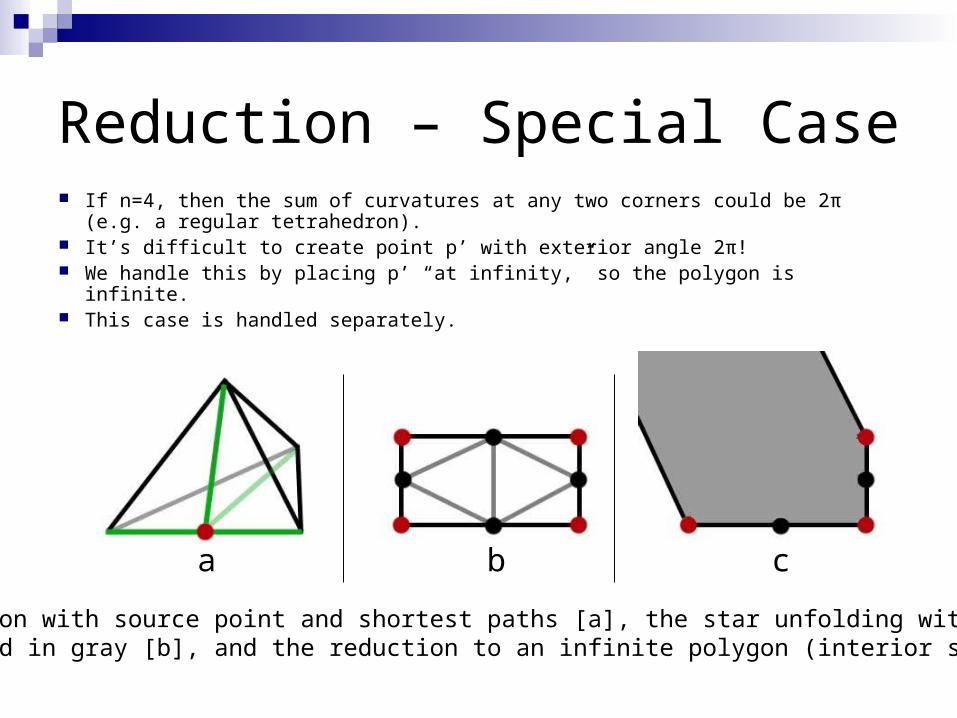
Reduction – Special Case If n=4, then the sum of curvatures at any two corners could be 2π (e.g. a
regular tetrahedron). It’s difficult to create point p’ with exterior angle 2π! We handle this by placing p’ “at infinity,” so the polygon is infinite. This case is handled separately.
A tetrahedron with source point and shortest paths [a], the star unfolding with polyhedronedges shaded in gray [b], and the reduction to an infinite polygon (interior shaded) [c].
a b c
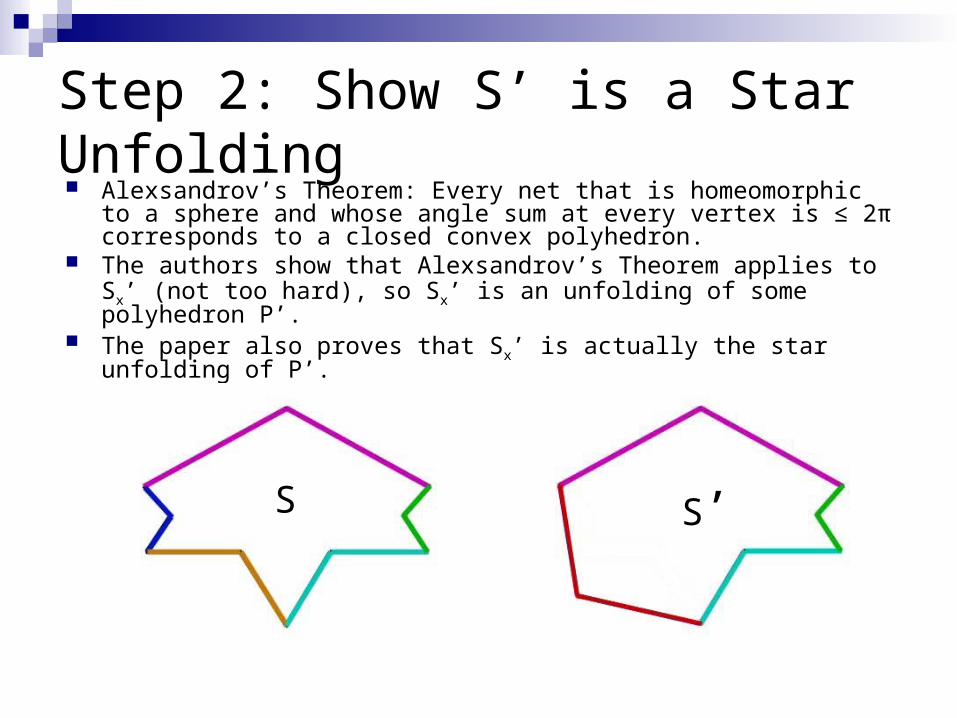
Step 2: Show S’ is a Star Unfolding Alexsandrov’s Theorem: Every net that is homeomorphic to a sphere and
whose angle sum at every vertex is ≤ 2π corresponds to a closed convex polyhedron.
The authors show that Alexsandrov’s Theorem applies to Sx’ (not too hard), so Sx’ is an unfolding of some polyhedron P’.
The paper also proves that Sx’ is actually the star unfolding of P’.
S S’
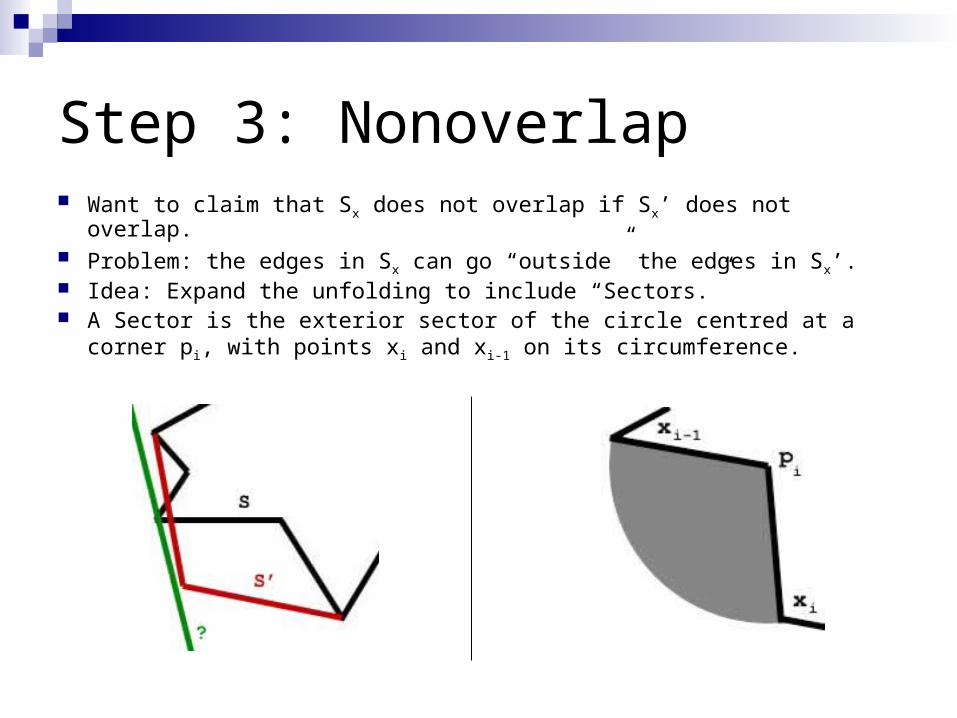
Step 3: Nonoverlap Want to claim that Sx does not overlap if Sx’ does not overlap. Problem: the edges in Sx can go “outside” the edges in Sx’. Idea: Expand the unfolding to include “Sectors.” A Sector is the exterior sector of the circle centred at a corner p i, with
points xi and xi-1 on its circumference.
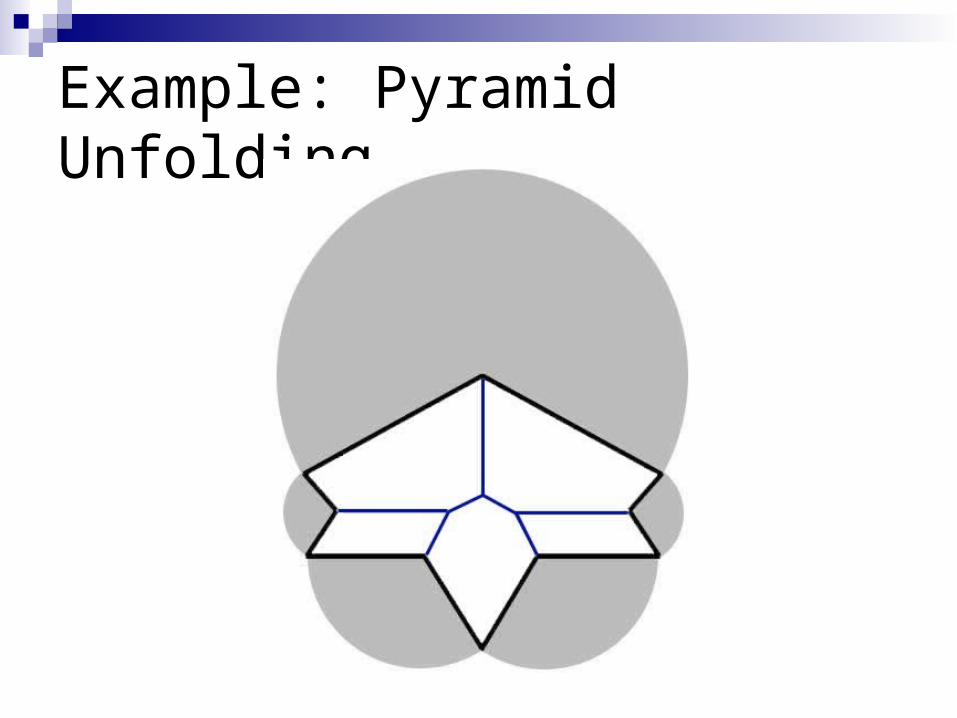
Example: Pyramid Unfolding
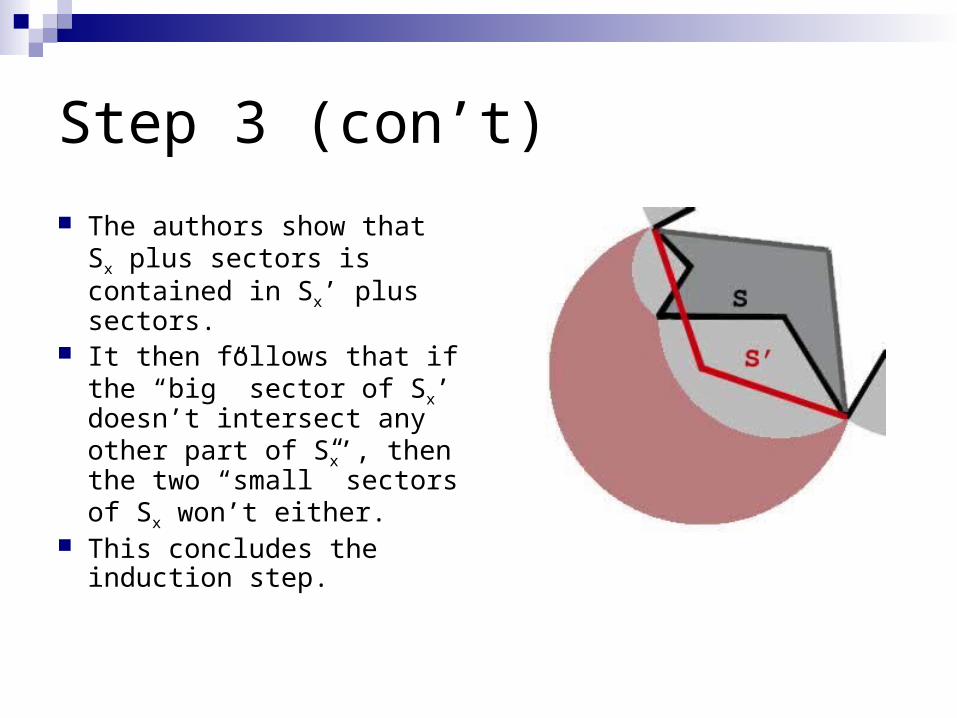
Step 3 (con’t)
The authors show that Sx plus sectors is contained in Sx’ plus sectors.
It then follows that if the “big” sector of Sx’ doesn’t intersect any other part of Sx’, then the two “small” sectors of Sx won’t either.
This concludes the induction step.
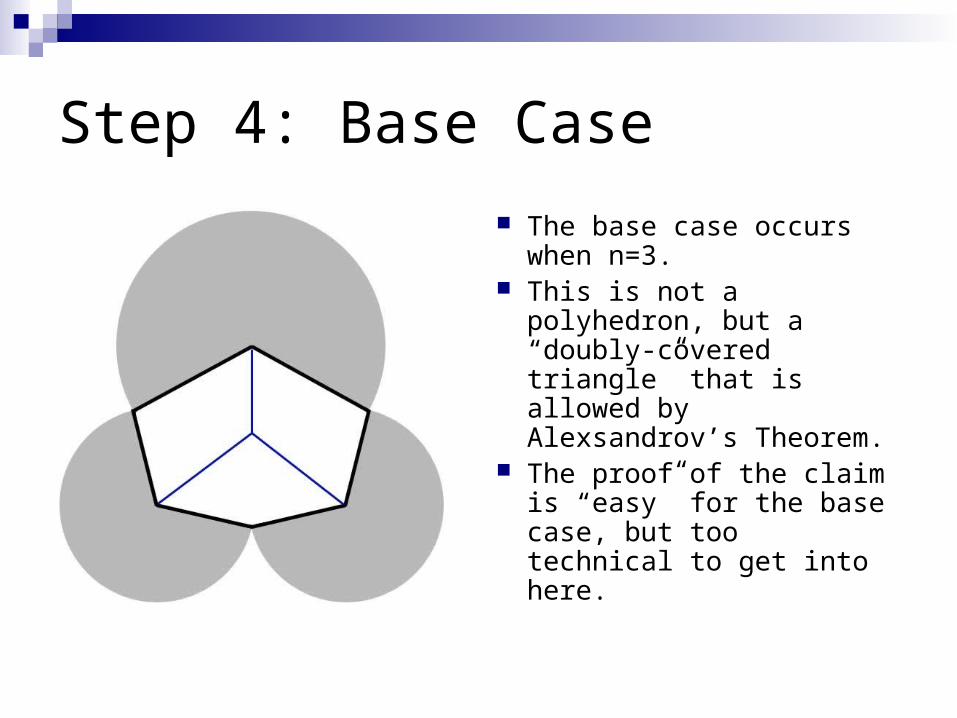
Step 4: Base Case
The base case occurs when n=3.
This is not a polyhedron, but a “doubly-covered triangle” that is allowed by Alexsandrov’s Theorem.
The proof of the claim is “easy” for the base case, but too technical to get into here.
Outline
Introduction Definitions Basic Properties Main Theorem Algorithmic Consequences
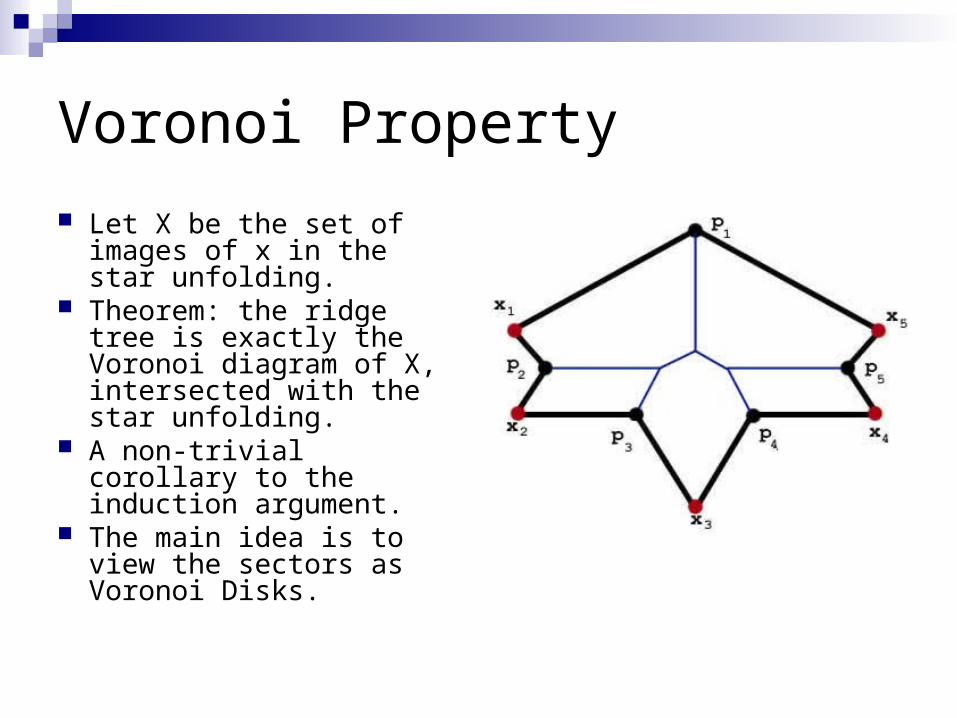
Voronoi Property
Let X be the set of images of x in the star unfolding.
Theorem: the ridge tree is exactly the Voronoi diagram of X, intersected with the star unfolding.
A non-trivial corollary to the induction argument.
The main idea is to view the sectors as Voronoi Disks.
Consequences of the Voronoi Property
It is now easy to construct the ridge tree: Generate the star unfolding Sx.
Compute the Voronoi diagram V of X. Restrict V to the interior of Sx.
This can be applied to previous algorithms: Justifies “Single-source shortest path queries” (Chen and Han, 1990) Simplifies the analysis of “Finding edge sequences for shortest
paths” (Sharir and Schorr, 1986) Improves running time of “Computing geodesic diameter of a
polyhedron” (Agarwal, Aronov, O’Rourke, and Schevon, 1990)
Conclusion: This Paper…
developed some properties of Ridge Trees and Star Unfoldings,
proved that the Star Unfolding of a convex polyhedron does not self-overlap, and
applied this theorem to existing algorithms.
Fin.


















