Lyapunov functionals and matrices€¦ · Here Pand Qare given symmetric matrices of the...
48
Lyapunov functionals and matrices Vladimir L. Kharitonov Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University 10-th Elgersburg School, March 4-10, 2018 Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State Unive Lyapunov functionals and matrices 10-th Elgersburg School, March 4-10, / 42
Transcript of Lyapunov functionals and matrices€¦ · Here Pand Qare given symmetric matrices of the...

Lyapunov functionals and matrices
Vladimir L. Kharitonov
Faculty of Applied Mathematics and Processes of ControlSaint-Petersburg State University
10-th Elgersburg School, March 4-10, 2018
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 1
/ 42

Outline
1 Quadratic performance index
2 Exponential estimates
3 Critical values of delay
4 Robustness bounds
5 Notes and references
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 2
/ 42

Evaluation of quadratic performance indices
We consider a control system of the form
dx(t)
dt= Ax(t) +Bu(t),
y(t) = Cx(t).
Assume that a control law of the form
u(t) = Mx(t− h), t ≥ 0, (1)
stabilizes the the system.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 3
/ 42

Evaluation of quadratic performance indices
The closed-loop system
dx(t)
dt= A0x(t) +A1x(t− h), t ≥ 0, (2)
whereA0 = A, and A1 = BM,
is exponentially stable. Given a quadratic performance index of theform
J(u) =
∞∫0
[yT (t)Py(t) + uT (t)Qu(t)
]dt. (3)
Here P and Q are given symmetric matrices of the appropriatedimensions.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 4
/ 42

Evaluation of quadratic performance indices
The value of the index can be presented in the form
J(u) =
∞∫0
[xT (t, ϕ)W0x(t, ϕ) + xT (t− h, ϕ)W1x(t− h, ϕ)
]dt,
where ϕ ∈ PC([−h, 0], Rn) is an initial function of the solution x(t, ϕ)of the closed loop system (2), and matrices W0 = CTPC,W1 = MTQM .
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 5
/ 42

Evaluation of quadratic performance indices
Theorem 1.4
The value of the performance index (3) for the stabilizing control law(1) is equal to
J(u) = v0(ϕ) +
0∫−h
ϕT (θ)W1ϕ(θ)dθ,
where the delay Lyapunov matrix U(τ) used in the functional v0(ϕ) isassociated with matrix W = W0 +W1 = CTPC +MTQM .
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 6
/ 42

Exponential estimates
We show here how an exponential estimate for the solutions of system
dx(t)
dt= A0x (t) +A1x (t− h) , t ≥ 0. (4)
can be derived with the use of complete type functionals. Let system(4) be exponentially stable, select positive definite matrices Wj ,j = 0, 1, 2, and define the complete type functional v(ϕ). Thefunctional satisfies the equality
d
dtv(xt) = −w(xt), t ≥ 0,
where
w(xt) = xT (t)W0x(t) +xT (t−h)W1x(t−h) +
0∫−h
xT (t+ θ)W2x(t+ θ)dθ.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 7
/ 42

Exponential estimates
First we show that there exists σ > 0 for which the inequality
dv(xt)
dt+ 2σv(xt) ≤ 0, t ≥ 0, (5)
holds. On the one hand, by Lemma 2.3 there exist δ(0)1 > 0 and
δ(0)2 > 0, such that
v(ϕ) ≤ δ(0)1 ‖ϕ(0)‖2 + δ(0)2
0∫−h
‖ϕ(θ)‖2 dθ, ϕ ∈ PC([−h, 0], Rn).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 8
/ 42

Exponential estimates
On the other hand, it is evident that
w(ϕ) ≥ λmin(W0) ‖ϕ(0)‖2 + λmin(W2)
0∫−h
‖ϕ(θ)‖2 dθ,
If σ > 0 satisfies the inequalities
2σδ1 ≤ λmin(W0), 2σδ2 ≤ λmin(W2).
then (5) holds.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 9
/ 42

Exponential estimates
Now, inequality (5) implies that
v(xt(ϕ)) ≤ v(ϕ)e−2σt, t ≥ 0.
It follows from Corollary 1.3 and Corollary 2.3 that
α1 ‖x(t, ϕ)‖2 ≤ v(xt(ϕ)) ≤ v(ϕ)e−2σt ≤ α2 ‖ϕ‖2h e−2σt, t ≥ 0.
And we arrive at the desired exponential estimate
‖x(t, ϕ)‖ ≤ γ ‖ϕ‖h e−σt, t ≥ 0,
where
γ =
√α2
α1.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 10
/ 42

Exponential estimates
Remark 1.4
It is worth of mentioning that the obtained exponential estimatedepends on the choice of positive definite matrices Wj, j = 0, 1, 2.These matrices may serve as free parameters for optimization of theestimate. Special choice of matrices Wj, j = 0, 1, 2, may result in atighter exponential estimate for the solutions of system (4).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 11
/ 42

Example
x(t) = A0x(t) +A1x(t− 1)
A0 =
(0 1−10 0
), A1 =
(0 00 2
)W0 = W1 = W2 =
1
3I
W = I.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 12
/ 42

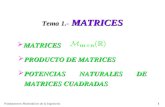
Norm of the Lyapunov matrix
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 13
/ 42

Example
‖U(0)‖ = 9.522
α1 = 0.071, α2 = 86.364, σ = 0.0029
‖x(t, ϕ)‖ 6√α2
α1e−σt‖ϕ‖H
‖x(t, ϕ)‖ 6 34.96 e−0.0029 t‖ϕ‖H
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 14
/ 42

Critical values of delay
In this section an interesting connection between the spectrum of theoriginal system (4), and that of the auxiliary delay free system
d
dτY (τ) = Y (τ)A0 + Z(τ)A1,
d
dτZ(τ) = −AT1 Y (τ)−AT0 Z(τ). (6)
will be established. But first we prove the following theorem.
Theorem 2.4
Let λ0 be an eigenvalue of the auxiliary delay free system (6), then −λ0is also an eigenvalue of the system.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 15
/ 42

Critical values of delay
The following theorem provides a connection between the spectrum oftime-delay system (4), and that of delay free system (6). Thisconnection may be effectively used for the computation of critical delayvalues of system (4), i.e., the values for which system (4) admits aneigenvalue on the imaginary axis of the complex plane.
Theorem 3.4
If s0 is an eigenvalue of time-delay system (4), such that −s0 is also aneigenvalue of the system, then s0 and − s0 belong to the spectrum ofdelay free system (6).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 16
/ 42

Critical values of delay
Remark 2.4
The spectrum Λ of the delay system (4) depends on the delay value h,while the spectrum of the delay free system (6) does not depend of h. Inparticular, this means that system (4) remains exponentially stable(unstable) for all values of delay h ≥ 0, if the spectrum of system (6)has no common points with the imaginary axis of the complex plane.On the other hand, the common points represent possible crossingpoints of the imaginary axis through which eigenvalues of system (4)may migrate from one half-plane to the other one, as the system delayh varies.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 17
/ 42

Example
x(t) = A0x(t) +A1x(t− h)
A0 =
(0 1−10 0
), A1 =
(0 00 2
)
L =
(I ⊗A0 I ⊗A1
−AT1 ⊗ I −AT0 ⊗ I
)
I ⊗A0 =
0 0 −10 00 0 0 −101 0 0 00 1 0 0
, I ⊗A1 =
0 0 0 00 0 0 00 0 2 00 0 0 2
AT0 ⊗ I =
0 −10 0 01 0 0 00 0 0 −100 0 1 0
, AT1 ⊗ I =
0 0 0 00 2 0 00 0 0 00 0 0 2
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices
10-th Elgersburg School, March 4-10, 2018 18/ 42

Example
Λ(L) ={±i√
10, ±i(√
11− 1), ±i(√
11 + 1)}
f(s) = s2esh + 10esh − 2s
f(iω) = 0 ⇐⇒
(ω2 − 10) cos(ωh) = 0,
(ω2 − 10) sin(ωh) = −2ω
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 19
/ 42

Example
1 ω =√
10 : f(iω) 6= 0
2 ω =√
11− 1 :
f(iω) = 0 ⇔ h =1√
11− 1
(π2
+ 2πk), k = 0, 1, . . .
3 ω =√
11 + 1 :
f(iω) = 0 ⇔ h =1√
11 + 1
(3π
2+ 2πk
), k = 0, 1, . . .
Critical delay values:
h 0.678 1.092 2.548 3.390 4.004 5.460 . . .
Stability region: h ∈ (0.678, 1.092)
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 20
/ 42

Robustness bounds
It is well-known that Lyapunov functions for delay free systems areeffectively used for estimation of the robustness bounds for perturbedsystems. The main contribution of the section consists in thedemonstration that the complete type functionals may also providereasonable robustness bounds for time-delay systems.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 21
/ 42

Robustness bounds
Consider a perturbed system of the form
dy(t)
dt= (A0 + ∆0) y(t) + (A1 + ∆1) y(t− h), t ≥ 0. (7)
Here matrices, ∆0 and ∆1, are unknown, but such that
‖∆k‖ ≤ ρk, k = 0, 1. (8)
Let system (4) be exponentially stable. We would like to findconditions on ρ0 and ρ1 under which system (7) remains stable for all∆0 and ∆1 satisfying (8).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 22
/ 42

Robustness bounds
To this end we will use a complete type functional v(ϕ) defined forsystem (4). We compute the time derivative of the functional along thesolutions of the perturbed system (7).
Lemma 1.4
The time derivative of functional v(ϕ) along the solutions of perturbedsystem (7) is of the form
d
dtv(yt) = −w(yt) + 2 [∆0y(t) + ∆1y(t− h)]T l(yt), t ≥ 0,
where
l(yt) = U(0)y(t) +
0∫−h
U(−h− θ)A1y(t+ θ)dθ.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 23
/ 42

Robustness bounds
We remind that v(yt) looks as
v(yt) = yT (t)U(0)y(t) + 2yT (t)
0∫−h
U(−h− θ)A1y(t+ θ)dθ
+
0∫−h
yT (t+ θ1)AT1
0∫−h
U(θ1 − θ2)A1y(t+ θ2)dθ2
dθ1+
0∫−h
yT (t+ θ) [W1 + (h+ θ)W2] y(t+ θ)dθ.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 24
/ 42

Robustness bounds
Letν = max
θ∈[0,h]‖U(θ)‖ , a = ‖A1‖ .
Then the following statement holds.
Theorem 4.4
Let system (4) be exponentially stable. Given positive definite matricesW0,W1,W2, system (7) remains exponentially stable for all ∆0 and ∆1
satisfying (8) if the following inequalities hold
1. λmin(W0) > ν [2ρ0 + hρ0a+ ρ1].
2. λmin(W1) ≥ νρ1 [1 + ha].
3. λmin (W2) ≥ ν [ρ0 + ρ1] a.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 25
/ 42

Robustness bounds
J1(t) = 2yT (t)∆T0 U(0)y(t)
≤ 2νρ0 ‖y(t)‖2 ,
J2(t) = 2yT (t− h)∆T1 U(0)y(t)
≤ νρ1
[‖y(t)‖2 + ‖y(t− h)‖2
],
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 26
/ 42

Robustness bounds
J3(t) = 2yT (t)∆T0
0∫−h
U(−h− θ)A1y(t+ θ)dθ
≤ hνρ0a ‖y(t)‖2 + νρ0a
0∫−h
‖y(t+ θ)‖2 dθ,
J4(t) = 2yT (t− h)∆T1
0∫−h
U(−h− θ)A1y(t+ θ)dθ
≤ hνρ1a ‖y(t− h)‖2 + νρ1a
0∫−h
‖y(t+ θ)‖2 dθ.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 27
/ 42

Robustness bounds
From the above inequalities we obtain that
d
dtv(yt) ≤ −w(yt) + ν [2ρ0 + hρ0a+ ρ1] ‖y(t)‖2
+νρ1 [1 + ha] ‖y(t− h)‖2
+ν [ρ0 + ρ1] a
0∫−h
‖y(t+ θ)‖2 dθ,
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 28
/ 42

Robustness bounds
Remark 3.4
Theorem 4.4 remains true if we assume that the uncertain matrices ∆0
and ∆1 are continuous functions of t and xt.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 29
/ 42

Example
x(t) = A0x(t) +A1x(t− 1)
A0 =
(0 1−10 0
), A1 =
(0 00 2
)W = I, ‖U(0)‖ = 9.522
W0 = W1 = W2 =1
3I
0.035 > 4ρ0 + ρ1,
0.035 > 3ρ1,
0.035 > 2ρ0 + 2ρ1
⇔
0.035 > 4ρ0 + ρ1,
0.012 > ρ1
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 30
/ 42

Notes and references
Yu.M. Repin
The first contribution dedicated to construction of the quadraticLyapunov functionals with a given time derivative was that by Yu.M.Repin (1965). In this seminal contribution a quadratic functional of ageneral form was suggested. The time derivative of the functional hasbeen computed, and then, equating the derivative to the prescribedone, a system of equations for the matrices that define the functionalhas been derived. The system includes a linear matrix partialdifferential equation, ordinary matrix differential equations, as well asalgebraic relations between the matrices.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 31
/ 42

Notes and references
Yu.M. Repin
Under some simplifying assumptions the system has been reduced to asystem of two matrix differential equations similar to that given by (6).We should admit that many essential elements needed for computationof Lyapunov matrices, some in an explicit form, and some in an implicitform, can be already found there. Without any doubts this three-pagescontribution had a profound impact on the research in the area.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 32
/ 42

Notes and references
R. Datko
In the paper by R. Datko, (1972), the main target was a presentationof an infinite dimensional version of the Lyapunov-Krasovskii approachto the stability analysis of linear time-delay systems. In particular, onecan find there an interpretation from the operator point of view of theresults given by Repin, (1965).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 33
/ 42

Notes and references
W.B. Castelan and E. F. Infante
The paper by W.B. Castelan and E. F. Infante (1977) is dedicated tothe following initial value problem
dQ(τ)
dτ= AQ(τ) +BQT (h− τ), Q(
h
2) = K, (9)
where K is a given n× n matrix. It is worth to be mentioned that thedynamic property in [28] was written in this form. It has been shownthere that for any given K the initial value problem admits a uniquesolution. An exhausted analysis of the solution space of the equation(9) is presented in the paper, as well. A reader can find thereinteresting observations on the spectrum of an auxiliary delay freesystem.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 34
/ 42

Notes and references
W.B. Castelan and E. F. Infante
A more interesting for us is the second paper by these Authors, (1978).Here for the first time the three basic properties of Lyapunov matriceshave been explicitly indicated. Once again, follow the traditionestablished by Repin (1965), the dynamic property was written in theform of the equation (9). The symmetry property has not received thedue attention, it was just mentioned as a property of a matrix Q(τ)similar to that of the improper integral
U(τ) =
∞∫0
KT (t)WK(t+ τ)dt.
The algebraic property has been introduced as a bridge connectingmatrices Q(τ), and Q(τ).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 35
/ 42

Notes and references
W.B. Castelan and E. F. Infante
What is very important for us is that we can find there functionalssimilar to that of the complete type. For the functionals quadraticlower and upper bounds have been provided. The main goal of thepaper was to demonstrate that the functionals may be effectivelyapplied for the computation of upper exponential estimates of thesolutions of time-delay systems.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 36
/ 42

Notes and references
W.B. Castelan and E. F. Infante
Unfortunately, at one of the intermediate steps, namely in thecomputation of an upper bound for the functional the desiredexponential estimate has been explicitly used. There we also find aremark without proof that for the case of exponentially stable systemsthe functional v0(ϕ) does not admit quadratic lower bounds.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 37
/ 42

Notes and references
W. Huang
Next serious break-through in this direction has been done in the paperby W. Huang (1989), where the existence of lower bounds for thefunctionals of the form v0(ϕ) has been studied. It has beendemonstrated there for the case of exponentially stable systems thatthe functionals admit local cubic lower bounds of the following form
α ‖ϕ(0)‖3 ≤ v0(ϕ), ϕ ∈ C([−h, 0], Rn), and ‖ϕ‖h ≤ H,
where α and H are two positive constants.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 38
/ 42

Notes and references
W. Huang
It is important to say here that this result, as well as the other onespresented in this contribution, have been proven for a very generalclass of linear time-delay systems. Probably this is the first paperwhere it has been explicitly stated that Lyapunov matrices arecompletely defined by the three basic properties: the dynamic, thesymmetry, and the algebraic ones. The most important resultpresented there is the existence theorem. The theorem states that if atime-delay system satisfies the Lyapunov condition, then for anysymmetric matrix W there exists a corresponding Lyapunov matrix.And what is more, an explicit frequency domain expression for theLyapunov matrix has been given, as well.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 39
/ 42

Notes and references
J.E. Marshall, H. Gorecki, A. Korytowski, and K. Walton
A detail account of the application of the functionals of the form v0(ϕ)to the computation of various quadratic performance indices can befind in an interesting book by J.E. Marshall, H. Gorecki, A.Korytowski, and K. Walton (1992).
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 40
/ 42

Notes and references
J. Louisell
In the paper by J. Louisell (2001) a relation between the spectrum ofthe time-delay system and that of the auxiliary delay free system ofmatrix equations has been established. Namely, it has been shown thatany pure imaginary eigenvalue of the time-delay system is also aneigenvalue of the auxiliary system. The statement has been obtainedfor the case of neutral type systems with one delay. In some sense thestatement of Theorem 3.4 is a generalization of this important result.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 41
/ 42

Notes and references
S. Mondie
The following open problem is one of the most important related withLyapunov matrices, and deserves to be mentioned here: Findconditions of the exponential stability of system (??) expressed in theterms of a Lyapunov matrix U(τ), associated with a positive definitematrix W . The first result in this direction has been obtained by S.Mondie (2012), where some necessary and sufficient conditions havebeen derived for the case of scalar equation.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Bellman, R. and Cooke, K.L., Differential-Difference Equations,Academic Press, New York, 1963.
Castelan, W. B. and Infante, E. F., On a functional equationarising in the stability theory of difference-differential equations,Quarterly of Applied Mathematics, 35: 311–319, 1977.
Castelan, W. B. and Infante, E. F., A Liapunov functional for amatrix neutral difference-differential equation with one delay,Journal of Mathematical Analysis and Applications, 71: 105–130,1979.
Datko, R., An algorithm for computing Liapunov functionals forsome differential difference equations, In L. Weiss (Ed.), OrdinaryDifferential Equations, Academic Press, New York, 387–398, 1972.
Datko, R., A procedure for determination of the exponentialstability of certain diferential-difference equations, Quarterly ofApplied Mathematics, 36: 279–292, 1978.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Datko, R., Lyapunov functionals for certain linear delay-differentialequations in a Hilbert space, Journal of Mathematical Analysis andApplications, 76: 37–57, 1980.
Garcia-Lozano, H., and Kharitonov, V.L., Numerical computationof time delay Lyapunov matrices, 6th IFAC Workshop on TimeDelay Systems, L’Aquila, Italy, 10-12 July, 2006.
Graham, A., Kronecker Products and Matrix Calculus withApplications, Ellis Horwood, Ltd., Chichester, UK, 1981.
Gu, K., Kharitonov, V.L. and Chen, J., Stability of Time DelaySystems, Birkhauser, Boston, MA, 2003.
Huang, W., Generalization of Liapunov’s theorem in a linear delaysystem, Journal of Mathematical Analysis and Applications, 142:83–94, 1989.
Infante, E.F., Some results on the Lyapunov stability of functionalequations, In K.B. Hannsgen, T.L. Herdmn. H.W. Stech and R.L.Wheeler (Eds), Volterra and Functional Differential Equations,
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Lecture Notes in Pure and Applied Mathematics, Marcel Dekker,New York, 81: 51–60, 1982.
Infante, E.F. and Castelan, W.V., A Lyapunov functional for amatrix difference-differential equation, Journal of DifferentialEquations, 29: 439–451, 1978.
Jarlebring, E., Vanbiervliet, J. and Michiels, W., Characterizingand computing the H2 norm of time delay systems by solwing thedelay Lyapunov equation, Proceedings 49th IEEE Conference onDecision and Control, 2010.
Kharitonov, V.L., Lyapunov matrices: Existence and uniquenessissues, Automatica, 46: 1725–1729, 2010.
Kharitonov, V.L., Lyapunov functionals and matrices, AnnualReviews in Control, 34: 13–20, 2010.
Kharitonov, V.L., On the uniqueness of Lyapunov matrices for atime-delay system , Systems & Control Letters, 61: 397–402, 2012.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Kharitonov, V.L. and Hinrichsen, D., Exponential estimates fortime delay systems, Systems & Control Letters, 53: 395–405, 2004.
Kharitonov, V.L. and Plischke, E., Lyapunov matrices for timedelay systems, Systems & Control Letters, 55: 697–706, 2006.
Kharitonov, V. L. and Zhabko, A.P., Lyapunov-Krasovskiiapproach to robust stability analysis of time delay systems,Automatica, 39: 15–20, 2003.
Krasovskii, N.N., Stability of Motion, [Russian], Moscow, 1959,[English translation] Stanford University Press, Stanford, CA, 1963.
Krasovskii, N.N., On using the Lyapunov second method forequations with time delay, [Russian], Prikladnaya Matematika iMehanika, 20: 315–327, 1956.
Krasovskii, N.N., On the asymptotic stability of systems withaftereffect, [Russian], Prikladnaya Matematika i Mechanika, 20:513–518, 1956.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Louisel, J., Growth estimates and asymptotic stability for a class ofdifferential-delay equation having time-varying delay, Journal ofMathematical Analysis and Applications, 164: 453–479, 1992.
Louisell, J., Numerics of the stability exponent and eigenvalueabscissas of a matrix delay system, In L. Dugard and E.I. Verriest(Eds), Stability and Control of Time - delay Systems, LectureNotes in Control and Information Sciences, 228, Springer-Verlag,140–157, 1997.
Louisell, J., A matrix method for determining the imaginary axiseigenvalues of a delay system, IEEE Transactions on AutomaticControl, 46: 2008-2012, 2001.
Marshall, J.E., Gorecki, H., Korytowski, A. and Walton, K.,Time-Delay Systems : Stability and Performance Criteria withApplications, Ellis Horwood, New York, New York, NY, 1992.
Mondie, S., Assesing the exact stability region of the single delayscalar equation via its Lyapunov function, IMA Journal ofMathematical Control and Information, ID:DNS004, 2012.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42

Repin, Yu.M., Quadratic Lyapuno functionals for systems withdelay [Russian], Prikladnaya Matematika i Mechanika, 29:564–566, 1965.
Vladimir L. Kharitonov (Faculty of Applied Mathematics and Processes of Control Saint-Petersburg State University)Lyapunov functionals and matrices10-th Elgersburg School, March 4-10, 2018 42
/ 42