[IEEE First Asia International Conference on Modelling & Simulation (AMS'07) - Phyket, Thailand...
3
Abstract—Wireless sensor networks consist of a number of small processors, nodes, which communicate by using Ad Hoc techniques. Bluetooth can be a good candidate for communications in short range sensor networks. There has been little interest in Bluetooth sensor networks though the idea is not new. In this paper, we describe an experimental Bluetooth sensor network and related implementation issues . Index Terms—Sensor Networks, Bluetooth technology, cluster based routing I. INTRODUCTION Ireless sensor network (WSN) is a collection of entities that act in a distributed and autonomous manner for data acquisition and administration. The entities consist of a number of processors coupled to sensors which communicate with each other using some Ad Hoc radio techniques. The sensor, processor, communication system and power source are together called a node. Applications of WSN range from medical, where the nodes can cater the information about the health of a patient, to tactical military networks where the sensors can be used for surveillance of enemy territory. WSN impose very strict requirements on nodes. These may be physical, such as very small size, power expenditure, and no maintenance for entire lifetime; or functional, such as automatic network assembly, scalability, high throughput etc. In order to meet all these requirements, it is necessary that the nodes be so small as to be able to be fabricated on a single chip. The radio access technique that the nodes use to communicate with each other should have a number of characteristics such as resistance to interference, fairly good throughput, and possibly some inbuilt security. Bluetooth is a good candidate for some reasons. Bluetooth is a short range cable replacement technology. It provides a standard communications interface between devices, and data rate enough for multimedia applications. The technology uses unlicensed 2.4 GHz spectrum which ensures zero operating costs for spectrum usage. Gross data rate of 1 Mbps means enough data so as to enable real time operation. If sensor nodes can be fabricated using Bluetooth, any device with Bluetooth interface can access the nodes of Chandrashekhar Dethe was with SSGM College of engineering. He is now Yeshwantrao Chavan College of Engineering, Nagpur, (e-mail: [email protected] ). Digambar Wakde is with SSGM College of Engineering, Shegaon. Chandrakant Jaybhaye was a final year student at SSGM College of Engineering. He is now with Digital Security Group at Cognizant Technology Solutions India Pvt. Ltd. sensor network which provides huge flexibility, meaning, with suitable application software, one can read the temperature of a furnace with a cell phone, PDA, or laptop. If the nodes could be produced on a large scale, the costs would be less. (Currently, the cost of a Bluetooth node in Integrated circuits is $5). Bluetooth also has advantage of low power operation. These features, we think, are attractive since they promise a data rate of 1Mbps from a single chip data acquisition system operating at nominal power. Hence, we decided to experiment with Bluetooth for sensor networks. Rest of the paper is organized as follows- section 2 describes our experimental system, section 3 describes current status and implementation issues and section 4 concludes. II. SANJAY, A BLUETOOTH SENSOR NETWORK NODE The Bluetooth sensor network that we realized is in the form of a pair of sensor nodes communicating with a PC. On one end is the Bluetooth sensor network node made up of a sensor, a microcontroller, Bluetooth host and power supply (nickname Sanjay). The two nodes sample an analog signal at a rate high enough to ensure that power line signal waveforms can be reconstructed at the other end which is a personal computer. The two nodes report their data in a round robin manner to a PC with Bluetooth host attached to it. Once the data is acquired by computer, any required variable can be calculated. Fig. 1 Simple Bluetooth Sensor Network with two nodes and an access point In sensor node, the microcontroller AT89C51 controls the sensor operation, gathers data, carries out analog to digital conversion and sends the data to Bluetooth host over UART. The microcontroller AT89C51 is used because our familiarity with it reduced development time. The Bluetooth host is not used for controlling sensor for a number of reasons. First, any microcontroller running Bluetooth protocol stack is loaded enough; to require it to control sensor additionally would endanger satisfactory performance. Secondly, in a fully distributed environment, the nodes need to carry out routing and Bluetooth based Sensor Networks Issues and Techniques Chandrashekhar Dethe, Digambar Wakde, Chandrakant Jaybhaye W Proceedings of the First Asia International Conference on Modelling & Simulation (AMS'07) 0-7695-2845-7/07 $20.00 © 2007
-
Upload
chandrakant -
Category
Documents
-
view
217 -
download
4
Transcript of [IEEE First Asia International Conference on Modelling & Simulation (AMS'07) - Phyket, Thailand...
![Page 1: [IEEE First Asia International Conference on Modelling & Simulation (AMS'07) - Phyket, Thailand (2007.03.27-2007.03.30)] First Asia International Conference on Modelling & Simulation](https://reader035.fdocuments.us/reader035/viewer/2022080417/5750a1be1a28abcf0c95e32f/html5/thumbnails/1.jpg)
Abstract—Wireless sensor networks consist of a number of small processors, nodes, which communicate by using Ad Hoc techniques. Bluetooth can be a good candidate for communications in short range sensor networks. There has been little interest in Bluetooth sensor networks though the idea is not new. In this paper, we describe an experimental Bluetooth sensor network and related implementation issues
.
Index Terms—Sensor Networks, Bluetooth technology, cluster based routing
I. INTRODUCTION Ireless sensor network (WSN) is a collection of entities that act in a distributed and autonomous manner for data acquisition and administration. The entities consist of a
number of processors coupled to sensors which communicate with each other using some Ad Hoc radio techniques. The sensor, processor, communication system and power source are together called a node. Applications of WSN range from medical, where the nodes can cater the information about the health of a patient, to tactical military networks where the sensors can be used for surveillance of enemy territory.
WSN impose very strict requirements on nodes. These may be physical, such as very small size, power expenditure, and no maintenance for entire lifetime; or functional, such as automatic network assembly, scalability, high throughput etc. In order to meet all these requirements, it is necessary that the nodes be so small as to be able to be fabricated on a single chip. The radio access technique that the nodes use to communicate with each other should have a number of characteristics such as resistance to interference, fairly good throughput, and possibly some inbuilt security.
Bluetooth is a good candidate for some reasons. Bluetooth is a short range cable replacement technology. It provides a standard communications interface between devices, and data rate enough for multimedia applications. The technology uses unlicensed 2.4 GHz spectrum which ensures zero operating costs for spectrum usage. Gross data rate of 1 Mbps means enough data so as to enable real time operation. If sensor nodes can be fabricated using Bluetooth, any device with Bluetooth interface can access the nodes of
Chandrashekhar Dethe was with SSGM College of engineering. He is now
Yeshwantrao Chavan College of Engineering, Nagpur, (e-mail: [email protected] ). Digambar Wakde is with SSGM College of Engineering, Shegaon. Chandrakant Jaybhaye was a final year student at SSGM College of
Engineering. He is now with Digital Security Group at Cognizant Technology Solutions India Pvt. Ltd.
sensor network which provides huge flexibility, meaning, with suitable application software, one can read the temperature of a furnace with a cell phone, PDA, or laptop. If the nodes could be produced on a large scale, the costs would be less. (Currently, the cost of a Bluetooth node in Integrated circuits is $5).
Bluetooth also has advantage of low power operation. These features, we think, are attractive since they promise a data rate of 1Mbps from a single chip data acquisition system operating at nominal power. Hence, we decided to experiment with Bluetooth for sensor networks. Rest of the paper is organized as follows- section 2 describes our experimental system, section 3 describes current status and implementation issues and section 4 concludes.
II. SANJAY, A BLUETOOTH SENSOR NETWORK NODE The Bluetooth sensor network that we realized is in the form of
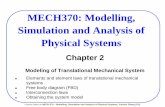
a pair of sensor nodes communicating with a PC. On one end is the Bluetooth sensor network node made up of a sensor, a microcontroller, Bluetooth host and power supply (nickname Sanjay). The two nodes sample an analog signal at a rate high enough to ensure that power line signal waveforms can be reconstructed at the other end which is a personal computer. The two nodes report their data in a round robin manner to a PC with Bluetooth host attached to it. Once the data is acquired by computer, any required variable can be calculated.
Fig. 1 Simple Bluetooth Sensor Network with two nodes and an access point In sensor node, the microcontroller AT89C51 controls the sensor operation, gathers data, carries out analog to digital conversion and sends the data to Bluetooth host over UART. The microcontroller AT89C51 is used because our familiarity with it reduced development time. The Bluetooth host is not used for controlling sensor for a number of reasons. First, any microcontroller running Bluetooth protocol stack is loaded enough; to require it to control sensor additionally would endanger satisfactory performance. Secondly, in a fully distributed environment, the nodes need to carry out routing and
Bluetooth based Sensor Networks Issues and Techniques
Chandrashekhar Dethe, Digambar Wakde, Chandrakant Jaybhaye
W
Proceedings of the First Asia International Conference on Modelling & Simulation (AMS'07)0-7695-2845-7/07 $20.00 © 2007
![Page 2: [IEEE First Asia International Conference on Modelling & Simulation (AMS'07) - Phyket, Thailand (2007.03.27-2007.03.30)] First Asia International Conference on Modelling & Simulation](https://reader035.fdocuments.us/reader035/viewer/2022080417/5750a1be1a28abcf0c95e32f/html5/thumbnails/2.jpg)
information dissemination among them. Satisfactory operation could be achieved only if the more complex tasks of routing and network management related functions are allowed to be done by a separate microcontroller. Since the system was meant to be a prototype and a kind of a test bed, single chip solution wasn’t created.
Fig. 2 Block Diagram of System
This system has worked fine for distances as high as 93 meters and even when communicating entities were separated by an obstacle such as door or wall. Supported data rates are enough so as to enable complete reconstruction of waveform through Digital Signal Processing at the other end.
III. CURRENT STATUS AND IMPLEMENTATION ISSUES Since two communicating nodes can be a maximum of 100 meters apart, a large number of nodes are required to gather information over a large area. In Bluetooth, a maximum of 7 hosts can be synchronized to a single time reference; where the time reference is determined by the physical address and clock of one of the hosts, which is called master. The remaining hosts are called slaves and a master and associated slaves are together called to form a piconet. All communications in a piconet are between master and slave only, direct slave to slave communications are not allowed. Master in each piconet has all required information about a piconet, determines who goes next and carries out other network management functions. A node can be a part of more than one piconet. It can be slave in more than one piconets but master in only one piconet. Since the time reference of a piconet is determined by clock and address of master, two piconets governed by one master cannot have different time references and as such, cannot be called two different piconets. A number of piconets having some hosts in common form a scatternet.
We are working towards a fully distributed system in which each node falls in one of the three categories, sensor node, and bridge/controller node and access point. All of them are physically identical, the classification is only functional. A sensor node, like node 4 in fig. 4, is slave in only one piconet and has the simplest task of responding to data enquiry. Master of a piconet, like node 2 or 3, is controller node and carries out network management related functions. It’s routing table contains information about the masters of adjoining piconets. Bridge nodes, like node 1, are members of more than one piconet. Bridge and controller nodes are the only nodes involved in routing process. A gateway node, like node 5, acts as entry point for queries and exit point for responses. Routing table of each node contains information about each node in its piconet. The routing table of a controller node contains information about masters of adjoining piconets.
Initially, no network functionality of any kind is operational.
The network has to undergo self assembly phase. During this phase, each node identifies its neighbors. Any node that has more than 7 neighbors has to act as a bridge node. All the nodes exchange this information and using some suitable algorithm, members of each piconet and it’s master are selected. This decides functionalities of nodes. All nodes that are slave in one piconet only act as sensor nodes, masters of each piconet are controllers, nodes that are members of more than one piconet become bridge nodes and nodes that are within transmission range of some master controller such as PC/LAPTOP/PALMTOP/SERVER become gateway nodes.
Whenever a node has data to send to one of nodes, it consults routing table. If the recipient is in its own piconet, the data is first given to master of piconet and the master gives the data to intended recipient. If the recipient is not in it’s own piconet, a route request is sent to it’s own master. This master then forwards the request to bridge nodes. From this point on, only controller and bridge nodes participate in route discovery process. The route request propagates till it reaches the master of piconet in which, intended recipient lay. Such a master then sends a route reply. The efficiency of this scheme must increase with network size. This follows directly since only the masters of each piconet need to be consulted, which means only one additional node needs to be queried per 8 new nodes added. All periodically sent data is collected in a database so that the data may be used in future for analysis purpose. This database may even be made accessible over internet so that a number of distant applications can utilize the data.
Doing so requires us to address following issues – • The Bluetooth protocol stack is complex with six layers. All of these are not required for successful operation of a sensor network. What layers are essential for Bluetooth protocol stack for optimum functionality of sensor networks? Is it required to make any changes to existing protocol stack? • In a Bluetooth piconet, slave-slave communications cannot take place directly. It involves master(s) of the piconet(s). In fully distributed operation, wherein each node needs to communicate with every other node, is the throughput enough so as to ensure proper operation? What issues arise out of additional complexity involved? What about communication delays? • In Bluetooth, the communications can take place only after link has been established. What is appropriate algorithm that will
Proceedings of the First Asia International Conference on Modelling & Simulation (AMS'07)0-7695-2845-7/07 $20.00 © 2007
![Page 3: [IEEE First Asia International Conference on Modelling & Simulation (AMS'07) - Phyket, Thailand (2007.03.27-2007.03.30)] First Asia International Conference on Modelling & Simulation](https://reader035.fdocuments.us/reader035/viewer/2022080417/5750a1be1a28abcf0c95e32f/html5/thumbnails/3.jpg)
work with device discovery and scale to networks of thousands of nodes to achieve above said features?
IV. CONCLUSION We conclude by saying that all of Bluetooth protocol stack is definitely not required for successful operation of a sensor network. Additional complexity is involved due to inherently mutlihop nature of communications. Bluetooth is definitely ideal solution for small scale and personal area sensor networks, but whether it will be used in tomorrow’s large scale sensor networks for network management functions depends upon discovery of efficient routing and network assembly protocols and shall be interesting to see.
REFERENCES [1] ]Mikael Nordman, An Architecture for Wireless Sensors in Distributed
Management of Electrical Distribution Systems, Dissertation for degree of Doctor of Science, Helsinki University,2004
[2] Bluetooth SIG, Specification of Bluetooth system Ver. 1.0, Vol. 1, Feb. 2001
[3] Bluetooth SIG, Specification of Bluetooth system Ver. 1.0, Vol. 2, Feb. 2001
[4] Bluetooth SIG, Specification of Bluetooth system Ver. 2. .
Proceedings of the First Asia International Conference on Modelling & Simulation (AMS'07)0-7695-2845-7/07 $20.00 © 2007