COOPERATIVE ADAPTIVE DRIVING FOR PLATOONING …
13
Int. J. Appl. Math. Comput. Sci., 2019, Vol. 29, No. 2, 213–225 DOI: 10.2478/amcs-2019-0016 COOPERATIVE ADAPTIVE DRIVING FOR PLATOONING AUTONOMOUS SELF DRIVING BASED ON EDGE COMPUTING BEN-J YE CHANG a ,REN-HUNG HWANG b, ∗ ,YUEH-LIN TSAI a ,BO-HAN YU a , YING-HSIN LIANG c a Department of Computer Science and Information Engineering National Yunlin University of Science and Technology 123 University Rd., Sec. 3, Douliou, Yunlin 64002, Taiwan, Republic of China b Department of Computer Science and Information Engineering National Chung Cheng University 168, University Rd., Sec. 1, Minhsiung, Chiayi 62102, Taiwan, Republic of China e-mail: [email protected] c Department of Multimedia Animation and Application Nan Kai University of Technology 568, Zhongzheng Rd., Caotun, Nantou, 542, Taiwan, Republic of China Cooperative adaptive cruise control (CACC) for human and autonomous self-driving aims to achieve active safe driving that avoids vehicle accidents or traffic jam by exchanging the road traffic information (e.g., traffic flow, traffic density, velocity variation, etc.) among neighbor vehicles. However, in CACC, the butterfly effect is encountered while exhibiting asynchronous brakes that easily lead to backward shock-waves and are difficult to remove. Several critical issues should be addressed in CACC, including (i) difficulties with adaptive steering of the inter-vehicle distances among neighbor vehicles and the vehicle speed, (ii) the butterfly effect, (iii) unstable vehicle traffic flow, etc. To address the above issues in CACC, this paper proposes the mobile edge computing-based vehicular cloud of the cooperative adaptive driving (CAD) approach to avoid shock-waves efficiently in platoon driving. Numerical results demonstrate that the CAD approach outperforms the compared techniques in the number of shock-waves, average vehicle velocity, average travel time and time to collision (TTC). Additionally, the adaptive platoon length is determined according to the traffic information gathered from the global and local clouds. Keywords: mobile edge computing, active safe driving, cooperative platoon driving, cooperative adaptive cruise control. 1. Introduction This section first briefly describes cooperative active safe driving (Burke and Williams, 2012) for achieving active safe driving, and then depicts adaptive cruise control (ACC) and cooperative adaptive cruise control (CACC). Furthermore, we classify the critical issues into two types, and the related studies are listed below. 1.1. Active safe driving. The work of Burke and Williams (2012), extended from ITS (2018), adopts VANET using wireless networking: IEEE 802.11p ∗ Corresponding author (IEEE, 2011; 2013) or LTE-V (3GPP, 2019; Chen et al., 2016), as the information sharing network for gathering the information on the vehicular traffic and road situation, and then cooperative-ITS (C-ITS) enables the cooperative mechanism for achieving active safe driving. Several driver-assist mechanisms: advanced driver-assistance systems (ADASs) (Maag et al., 2012), ACC (Pauwelussen and Feenstra, 2010; Stevenson, 2011), and CACC (Papadimitratos et al., 2009; Desjardinsand and Chaib-draa, 2011) are proposed to assist the driver by using various types of sensors (e.g., a radar, image scanner, video detector, etc.) to alarm drivers or to directly involve assistant driving control while encountering
Transcript of COOPERATIVE ADAPTIVE DRIVING FOR PLATOONING …

Int. J. Appl. Math. Comput. Sci., 2019, Vol. 29, No. 2, 213–225DOI: 10.2478/amcs-2019-0016
COOPERATIVE ADAPTIVE DRIVING FOR PLATOONING AUTONOMOUSSELF DRIVING BASED ON EDGE COMPUTING
BEN-JYE CHANG a , REN-HUNG HWANG b,∗, YUEH-LIN TSAI a , BO-HAN YU a ,YING-HSIN LIANG c
aDepartment of Computer Science and Information EngineeringNational Yunlin University of Science and Technology
123 University Rd., Sec. 3, Douliou, Yunlin 64002, Taiwan, Republic of China
bDepartment of Computer Science and Information EngineeringNational Chung Cheng University
168, University Rd., Sec. 1, Minhsiung, Chiayi 62102, Taiwan, Republic of Chinae-mail: [email protected]
cDepartment of Multimedia Animation and ApplicationNan Kai University of Technology
568, Zhongzheng Rd., Caotun, Nantou, 542, Taiwan, Republic of China
Cooperative adaptive cruise control (CACC) for human and autonomous self-driving aims to achieve active safe drivingthat avoids vehicle accidents or traffic jam by exchanging the road traffic information (e.g., traffic flow, traffic density,velocity variation, etc.) among neighbor vehicles. However, in CACC, the butterfly effect is encountered while exhibitingasynchronous brakes that easily lead to backward shock-waves and are difficult to remove. Several critical issues should beaddressed in CACC, including (i) difficulties with adaptive steering of the inter-vehicle distances among neighbor vehiclesand the vehicle speed, (ii) the butterfly effect, (iii) unstable vehicle traffic flow, etc. To address the above issues in CACC,this paper proposes the mobile edge computing-based vehicular cloud of the cooperative adaptive driving (CAD) approachto avoid shock-waves efficiently in platoon driving. Numerical results demonstrate that the CAD approach outperformsthe compared techniques in the number of shock-waves, average vehicle velocity, average travel time and time to collision(TTC). Additionally, the adaptive platoon length is determined according to the traffic information gathered from the globaland local clouds.
Keywords: mobile edge computing, active safe driving, cooperative platoon driving, cooperative adaptive cruise control.
1. Introduction
This section first briefly describes cooperative active safedriving (Burke and Williams, 2012) for achieving activesafe driving, and then depicts adaptive cruise control(ACC) and cooperative adaptive cruise control (CACC).Furthermore, we classify the critical issues into two types,and the related studies are listed below.
1.1. Active safe driving. The work of Burke andWilliams (2012), extended from ITS (2018), adoptsVANET using wireless networking: IEEE 802.11p
∗Corresponding author
(IEEE, 2011; 2013) or LTE-V (3GPP, 2019; Chenet al., 2016), as the information sharing network forgathering the information on the vehicular traffic androad situation, and then cooperative-ITS (C-ITS) enablesthe cooperative mechanism for achieving active safedriving. Several driver-assist mechanisms: advanceddriver-assistance systems (ADASs) (Maag et al., 2012),ACC (Pauwelussen and Feenstra, 2010; Stevenson, 2011),and CACC (Papadimitratos et al., 2009; Desjardinsandand Chaib-draa, 2011) are proposed to assist the driverby using various types of sensors (e.g., a radar, imagescanner, video detector, etc.) to alarm drivers or to directlyinvolve assistant driving control while encountering

214 B.-J. Chang et al.
explicit and implicit dangers. However, they suffer fromsudden braking and unstable driving. The asynchronousbraking and the stop-and-go results of the precedingvehicles easily yield a significant impact on the drivingspeed of the succeeding vehicles. The phenomenon iscalled the butterfly effect (Lorenz, 1963) and transfersa backward shockwave on the behind vehicle flow andmay cause danger. In distributed assistant driving control(e.g., CACC), several critical issues should be addressedto achieve safely active safe driving, including (i) a stablesafe time headway, (ii) a stable car-following distanceor a stable inter-vehicle distance, (iii) the minimum andmaximum driving speeds of different-class of roads, etc.The related works on assistant driving control can beclassified into two types: (i) cooperative warning andmaneuvering (Mitropoulos et al., 2010; Huang et al.,2010; Taleb et al., 2010; Milanes et al., 2011a; 2011b),and (ii) traffic flow stability and shockwave analysis(Asadi and Vahidi, 2011; Geroliminis and Skabardonis,2011; Schakel et al., 2010; Wilmink et al., 2007; Somdaand Cormerais, 2011). Furthermore, recently, the mobileedge computing (MEC) mechanism (Gomes et al., 2017;Dinh et al., 2017; Satria et al., 2017) has been specifiedto minimize the transmission delay by moving thecomputing-intensive and data-intensive virtual machineinstances of the global cloud to the local site that isnear the users. Extensively, the MEC mechanism can becombined and cooperated with the vehicular cloud.
1.2. Critical issues, motivations, and objectives.From related works on cooperative driving control, severalcritical issues occur in CACC for active safe driving.The problems below need be addressed effectively beforeachieving an efficient cooperative control for active safedriving.
1. Regarding CACC, several works neglect thetransmission delay of each wireless linkon the packet routing path, affecting theaccuracy of shockwave analysis (Mitropouloset al., 2010; Wilmink et al., 2007).
2. The butterfly effect yielding backward shockwavesand an unstable vehicle traffic flow are difficult tobe addressed in a fully distributed VANET (Milaneset al., 2011b; Geroliminis and Skabardonis, 2011;Wilmink et al., 2007).
3. Most works only concern the average vehiclevelocity, rather than some key parameters: trafficflow, traffic density, velocity variation (Taleb et al.,2010; Milanes et al., 2011a; Schakel et al., 2010;Somda and Cormerais, 2011).
This paper aims to propose a platoon-basedcooperative approach, extended from the work of Hwang
et al. (2017), which consists of three phases, toanalyze and detect driving backward shockwaves, toavoid unstable driving, and to increase driving safetyand time-to-collision (TTC). The significant contributionsinclude:
1. minimizing the backward shockwaves and thebutterfly effects problem in active safe driving,
2. adopting an adaptive platoon synchronizationdomain to dynamically determine the velocity andthe platoon length,
3. increasing the driving stability and minimizing thewaste of gasoline,
4. achieving active safety driving efficiently,
5. increasing road utilization, etc.
Note that in platoon-based CACC the platoon lengthis defined as the maximum length of a vehicle group, i.e.,the distance from the first vehicle member to the last one.
The reminder of this paper is organized as follows.The network model is defined in Section 2. Section 3details the proposed cooperative adaptive driving (CAD)approach. Numerical results of simulations are providedin Section 4. Conclusions are given in Section 5.
2. Network model
A vehicular network is defined as a directed graph G =(V,E) that consists of a set of mobile vehicles V and aset of wireless links E, as demonstrated in Fig. 1. Somevehicles equipped with the cooperative adaptive driving(CAD) system are denoted as V CAD
j (or Vj), where jrepresents the vehicle index, i.e., the light grey vehiclesthat install the CAD system and a wireless network andoffer various types of sensors to sense vehicle traffic orenvironmental objects (including all types of vehicles).Conversely, some vehicles not equipped with CAD aredenoted as V Non-CAD
k , as shown as the dark grey vehicles
4G LTE-A
eNB
Vehicle Index
Location
Velocity
Non CADCkVk
�
Global Cloud(GC)
Global traffic/road
information
. .
( )pp ,PMpiVi
x (p
Vpp ,PMp
iVi
( )pp ,PMpiVi
x (p ( )Non CADkVVk
x (Non CAD
( )Non CADkVk
x (Non CAD
Tx Range=500m
Index
.RangegRange
Tx RangTx RRang =500m550000mmmmmm
: eNB
: Safe Inter-Vehicle Distance
kVk�: Vehicle without CAD, e.g.,
: Platoon Leader equipped
with CAD, e.g., )sp PL CAD(s
j j(V (p PL, (j (
: Platoon Member equipped
with CAD, e.g., sp PM,s
j+1Vj
: Traffic Information Center (TIC)
1. Suddenly brake
.avg
Local sensed traffic
information
Platoon driving information
Mobile Edge Computing-based Vehicular Cloud(MEC-VC)
Precedence Platoon (or vehicle)
sp PL,sjV j
Traffic Information Center
(TIC)
)sp PL CADD((s
j jj(V (p PL, ((j (
))( )))sp PL,sjV j
x (s
( )sp PL,sjV j
xxx (s
2. Shockwave
moving direction
Radar sensing range
successor platoon ps ( )jjj
safetyVj
d td (safetyV
...
...
...
Fig. 1. Network model.

Cooperative adaptive driving for platooning autonomous self driving . . . 215
that can be sensed by V CAD but cannot communicate withany vehicles because of the lack of the wireless interface.
By using wireless communications, two types ofclouds are formed: the global cloud (GC) and thevehicular cloud (VC) (Abuelela and Olariu, 2010;Mousannif et al., 2011). CAD vehicles can receive globaltraffic information from the GC and the real-time-basedlocal traffic information from the VC managed by theplatoon. The managed traffic information consists ofspatial and time localities-based information, such asthe platoon identifier (PID), vehicle ID, geographicallocation, velocity, the limited speed of roads, etc.
In the vehicle platoon model, for any two adjacentplatoons, ps denotes the succeeding platoon and pp thepreceding platoon. The average velocity and the lengthof the platoon (e.g., ps) at time t are denoted as vps(t)and Lps(t), respectively. Nps(t) denotes the total numbervehicles of platoon ps at time t.
A platoon p, consists of two types of vehicles: theplatoon leader (e.g., V ps,PL
j ) and the platoon members.Thus, the geographical location and velocity of theplatoon leader j at time t are denoted as x
V ps,PLj
(t) and
xV ps,PLj
(t), respectively. Moreover, the distance to the
ahead adjacent vehicle is sensed by the radar sensor anddenoted as ΦV ps,PL
j. To guarantee safe driving, ΦV ps,PL
j
should be smaller than the determined safe inter-vehicledistance at time t, dSafe
Vj(t). dSafe
vj (t) is dynamicallydetermined according to three parameters: (i) the movingdistance after a response at time t, denoted as dResponse
Vj(t),
(ii) the required distance of a full stop at time t, denotedas dBrake
Vj(t), and (iii) the distance for the transmission of
synchronization message at time t, denoted as dSyncVj
(t).Furthermore, we assume that the minimum distance of thestandstill vehicle is sbumper.
Additionally, when the traffic flow (dpp ) andthe average vehicle velocity (vpp ) of the precedingplatoon decrease and the vehicle density (kpp ) increases,the successor platoon, ps, easily yields a backwardshockwave. The shockwave speed, WV
pp−s , can bedetermined by the differences of the traffic flow, theaverage vehicle velocity, and the vehicle density of thesuccessor and the preceding platoons.
3. Proposed CAD approach
This section details the proposed approach of cooperativeadaptive driving (CAD) that consists of three phases.
3.1. Phase 1: Cooperative vehicle platooning (CVP).For minimizing the butterfly effect and shockwaves, CADproposes an adaptive management for cooperative vehicleplatooning (CVP) driving as the key element for realizingCAD, extended from the work of Chang et al. (2017).Figure 2 demonstrates that the vehicles of a platoon ps
Gateway
Local CacheMEC-VCNameNode
Splits
Map Reduce33
GC
TIC
Job Tracker
eNBVirtualization
Platoon Members (PM) Platoon Leader (PL)sp PL,s
jVjsp PM,s
j+1Vj
sp PM,s
j+2Vj
Sharing/Access Sharing/Access
successor platoon, ps
: Locally Traffic and Road information
: Globally Traffic and Road Information
: Sharing link (uplink) of GC
: Vehicle-to-Vehicle communication
: Sharing and Access link of VC
: Access link (downlink) of GC
VirtualizationRowKey
TimeStamp
ColumnFamily
Platoon ID Vehicle IDGPS
LocationVelocity
90km/h . . .,
spPLjV
,spPM
j+1V
Global Traffic Information Table
Platoon
ID
Speed
Limit
Receive
Time
Direction of
Message
Synchronization
Time
84km/h 11:44:15 East 11:46:10
84km/h 11:45:26 East 11:46:10
Spatial and Time Localities-based Local Driving Information Table Assigns Assigns
. . .
95km/h
Fig. 2. Driving state of CAD.
exhibit two roles: (i) a platoon leader (e.g., V ps,PLj ) and
(ii) platoon members (e.g., V ps,PMj+1 ).
3.1.1. Platoon leader (PL) determination. In CAD,for minimizing the computing and transmission delay, themobile edge computing (MEC) mechanism (Gomes et al.,2017; Dinh et al., 2017; Satria et al., 2017) is adopted tomove the computing-intensive and data-intensive virtualmachine instances of the global cloud to the local site thatis closer to vehicles. Furthermore, the MEC mechanismis combined and cooperates with the vehicular cloud(namely VC or MEC-VC) to achieve real-time computing,to minimize transmission delay, and to allocate/re-directthe optimal VM instances of diverse applications to theplatoon.
Thus, in CAD, the first vehicle forming a platoon orthe vehicle with the least MAC address will be selectedas the platoon leader (PL) when the platoon is initialized.The PL manages the entire platoon synchronization andmaintains the platoon traffic information of each platoonmember in a local vehicle cloud (VC) table, as shown inFig. 2 and detailed below.
First, the PL manages the platoon members whensome of them join/leave the platoon. Second, by usinga local vehicle cloud, PL maintains the sensed/receivedtraffic information gathered from the shared broadcastmessages sent by PMs. Note that the sharing messageswith a timestamp are forwarded within a limited hopcount, i.e., the synchronization platoon length Lps(t),determined by Phase 3. Third, the PL determinesthe platoon velocity and synchronous length, andthen broadcasts the up-to-date control message to allPMs periodically or on demand. Thus, the PMscan synchronously adjust their velocity at the nextsynchronization time τ
Sync
V ps,PLj
.
For timely keeping and updating the local real-timetraffic information in the local MEC-VC, the cooperation

216 B.-J. Chang et al.
as a service (CaaS) cloud computing mechanism isproposed herein and managed by the PL, as demonstratedin Fig. 2. The local VC keeps the dynamic driving stateof each PM, including (i) platoon ID, (ii) vehicle ID, (iii)GPS location, (iv) vehicle velocity, (v) the highest velocityin history, (vi) limited speed, (vii) physical inter-distance,(viii) logical inter-distance, (ix) timestamp, (x) messageID, etc. Additionally, a global cloud (GC) is adoptedfor all vehicles of V CAD located on different areas/roadssharing the traffic information, and thus the GC providesthe global traffic and road information for every vehicle ofV CAD.
The main different functions of the GC and VCare compared below. The GC is a global-based cloudcomputing service that provides the global traffic/roadinformation as completely as possible, but the globalinformation may not be updated frequently. Conversely,the VC is local-based cloud computing service thatprovides the local traffic/road information as fast aspossible, but the local information may exclude the globalone. Thus, by using the hybrid cloud computing servicesof the MEC-VC and GC, the proposed cooperativeplatoon approach can offer both the completely globalinformation and the real-time local information.
Furthermore, the PL determines the platoonvelocity and synchronous length according to the trafficinformation. All PMs of the same platoon drive based onthe received information. Note that the platoon lengthand velocity are determined adaptively. As a result, CADobviously minimizes asynchronous brakes and avoidsdriving backward shockwaves.
3.1.2. Platoon member (PM) determination. In aplatoon, a PM periodically sends beacon with its drivingstates to neighbors, and thus the PL can finally gather thedriving information of all PMs within the platoon. Thegathered driving information includes (i) vehicle ID, (ii)geographical location, (iii) current velocity, (iv) highestvelocity in history, (v) physical inter-distance, and (vi)receive time (timestamp). Furthermore, the PM adjuststhe velocity and synchronization time after receiving theindication message sent from the PL.
Several platoon manage mechanisms are depicted asfollows. First, when the current PL leaves the platoon,the PM located in the first one will be selected as the newPL because the PL of a platoon needs to lead the entireplatoon moving forward. Second, when a vehicle withCAD moves alone, i.e., with no neighbors around it, itinitializes the PL selection procedure to select itself as thePL. Third, when two adjacent platoons move as closelyas possible, the succeeding one will be merged into thepreceding one.
The consecutive steps of Phase 1 (CVP) aredemonstrated as Algorithm 1.
Algoritm 1. Phase 1: Cooperative vehicle platooning (CVP)P1 CVP(·).
1 if(|p| = 0) //if the number of platoon members is 0.2 PL← v; //Vehicle v becomes PL3 UL Driving State(p, v);4 else //Join to a pltoon5 Join PM(p, v);6 if(v=PL) //if Vehicle v is the PL.7 Compute P Driving(p, v); // Platoon driving8 UL P Driving(p, v); //Upload Platoon driving to GC
3.2. Phase 2: Shockwave-avoidance driving (SAD).In Phase 1, the platoon is initialized and managed well.For avoiding shockwaves occurring in the cooperativeplatoon-based driving, this section details SAD, whichconsists of two sub-phases: (i) maximum and minimumplatoon velocities and (ii) dynamic safe car-followingdistance.
3.2.1. Phase 2-1: Maximum and minimum pla-toon velocities. In Phase 2 (SAD), the main objectiveis to control the platoon moving stably safely. Twoimportant factors affect the platoon stability: (i) a dynamicplatoon velocity for all PMs of the platoon and (ii) adynamic platoon length for message synchronization. Thedetermination of these dynamic factors for a platoon isdepicted in Phase 2-1 below.
In Fig. 3, in the case of non-platoon driving, asuccessive vehicle is affected by the preceding vehicle.Similarly, in the case of platoon driving, a succeedingplatoon (ps) is affected by the preceding platoon (pp).Clearly, the shockwaves occurring between two platoonsresult from the inter-platoon operation. Thus, forcooperative platoon driving, we first determine the trafficflow, traffic density and average vehicle velocity of twoadjacent platoons based on traffic flow theory (Kuhne andMichalopoulos, 1997; Helbing, 2001). The traffic flow isformulated as
q(t) = k(t)v(t), (1)
where k(t) is the traffic density at time t and v(t) isthe average velocity at time t. The traffic density k(t)can be defined as k(t) = N(t)/L(t), where N(t) is thetotal number of vehicles on a road segment or withina platoon and L(t) is the length of a road segment orthe platoon length at time t. The speed of a shockwavecan be determined by (Kuhne and Michalopoulos, 1997;Helbing, 2001)
WVpp−s(t) =
qpp(t)− qps(t)
kpp(t)− kps(t), (2)
where the traffic flow of the successor and precedenceplatoons (qps(t) and qpp(t)) can be obtained by Eqn. (1).

Cooperative adaptive driving for platooning autonomous self driving . . . 217
Traffic Shockwave Analysis
Traffic Density
spk
spq
sp
Low High
High
Tra
ffic
Flo
w ppk
pp
ppq
Low HighTraffic Density
High
Tra
ffic
Flo
w
Low HighTraffic Density
High
Tra
ffic
Flo
w
0p sVp
W�
�
Suddenly
brakes
ahead
precedence vehicle, pp
Shockwave
successor platoon, ps
pp
sp
Fig. 3. Driving state of the CAD approach.
The traffic density of the succeeding and precedingplatoons at time t (kps(t) and kpp(t)) is the determinedparameter. In consequence, a backward shockwave attime t, i.e., WV
pp−s(t) < 0, occurs in the followingconditions: (i) qpp(t) < qps(t), (ii) kpp(t) > kps(t) and(iii) vpp(t) < vps(t). Clearly, to avoid a shockwave, thespeed of a shockwave should not be a negative value, i.e.,WV
pp−s(t) ≥ 0. We have
WVpp−s(t) =
qpp(t)− qps(t)
kpp(t)− kps(t)
=
Npp(t)vpp(t)
Lpp(t)− Nps(t)vps (t)
Lps(t)
Npp(t)
Lpp(t)− Nps (t)
Lps(t)
> 1. (3)
The maximum platoon velocity (vmaxps (t)) at time t of
the succeeding platoon (ps) can be derived from Eqn. (3),
vmaxps (t) ≤ −
[Npp(t)Lps(t) (1− vpp(t))
Nps(t)Lpp(t)− 1
]. (4)
Additionally, for increasing the driving efficiently,the minimum platoon velocity needs to be determinedaccording to the local driving information and the historyinformation,
vminps (t) ≥ min
∀Nps(t){the highest velocity in history} ,
(5)where Nps(t) is the number of vehicles of the succeedingplatoon (ps) at time t.
3.2.2. Phase 2-2: Dynamic safe car-following dis-tance. For safe driving, a dynamic safe car-followingdistance is an important factor to be determined forevery vehicle. A high speed vehicle needs a longersafe car-following distance, and vice versa. This paperproposes a dynamic safe car-following distance forcooperative platoon driving, as detailed below.
In CAD, a platoon leader (PL) adopts thesynchronization message to send the platoonsynchronization time and to maximum platoon velocityto all PMs for minimizing the shockwaves and thebutterfly effects. Before detailing Phase 2-2, we firstintroduce following notation: the shockwave affection
range, WRpp−s(t), and the synchronous message distance,
dSyncV p,PLj
(t). First, the (backward) shockwave can be
detected by the PL xV ps,PLj
(t), and the shockwave
affection range, WRpp−s(t), can be estimated by the
shockwave speed, WVpp−s(t), as shown in Eqns. (3) and
(9).Second, the shockwave affection range, WR
pp−s(t),will be adopted for the determination of the synchronous
message distance,
(dSyncV p,PLj
(t)
), as shown in Case 3
in this section. Note that the synchronization lengthshould be shorter than the shockwave affection range, i.e.,dSyncV p,PLj
(t) < WRpp−s(t) .
As demonstrated in Fig. 4, in CAD, an adaptivesafe extended car-following distance for the PL, V p,PL
j , attime t (namely, dSafe
V p,PLj
(t)) is proposed to keep an absolute
safe distance for the platoon. dSafeV p,PLj
(t) consists of three
parts: (i) the moving distance of the response time tobrake, denoted by dResponse
V p,PLj
(t), (ii) the distance of the
bake to a full stop, dBrakeV p,PLj
(t), (iii) the distance required
for the transmission of a synchronous message from thepreceding platoon that detects a shockwave, dSync
V p,PLj
(t).
That is,
dSafeV p,PLj
(t)← dResponse
V p,PLj
(t) + dBrakeV p,PLj
(t) + dSync
V p,PLj
(t). (6)
Case 1: Response distance (dResponseV p,PL
j
(t)). A brake
may be initialized by a driver or an assistant longitudinalcontrol unit. During the response delay, a moving vehicleis moved forward with the distance of dResponse
V p,PLj
(t) before
braking,
dResponse
V p,PLj
(t) = β · xV p,PLj
(t), (7)
where β represents the response time and xV p,PLj
(t)
represents the vehicle velocity at time t.
sp PLp ,sjj
ncSyn
Vjj
.sncSyn
sp PL,sj
Response
Vjs
Responsesp PL,s
j
Brake
Vjs
Brake
( )))sp PLp PLp PL,,sj
Safe
VVVj
ddd (((ssSafesp PLp ,s
jjjj
,sp
PLPP
jV j
11
sp PM,s
jjjjjj
1
sp PM,sj
Response
Vjs
Response
jj 11
sp PM,sjj
Brake
VVjjs
Brake
jj
1
ssp PMPMp PM,,ssj
Safe
VVjs
Safe
jj
,
1
sp
PMPP
jV jjj
Direction
Fig. 4. Safe extended car-following distance of the PL and PMin CAD.

218 B.-J. Chang et al.
Case 2: Brake distance (dBreakV p,PL
j
(t)). Based on the
Newton laws of motion, the distance required for amoving vehicle to a full stop with a deceleration ofxV p,PL
j(t) and the minimum distance of the standstill
vehicle, sbumper, can be determined by
dBreakV p,PLj
(t) =xV p,PL
j(t)2
2 · g · μ(t) + sbumper, (8)
where g represents the gravitational acceleration, i.e.,9.8 m/s2, and μ(t) represents the coefficient of frictionbetween the tire and road surface at time t (MOTC, 2018).Note that sbumper is defined as 1/2 or one vehicle length.sbumper is required even though the PL is in the movingstate.
Case 3: Synchronous message distance (dSyncV p,PL
j
(t)).
The objective of the determination of the synchronousmessage distance, dSync
V p,PLj
(t), is for the successor platoon to
control the platoon velocity synchronously stably. Thus,the shockwave occurring before will not affect the drivingof the succeeding platoons. The transmission delay of theemergency message becomes important in CAD.
In CAD, a PL can detect a shockwave by twomethods. First, the PL actively detects a shockwaveresulting from the sudden braking of the precedingvehicle. Second, a preceding platoon or vehicle detectsthat there is a shockwave with a backward propagationspeed (succeeding propagation), WV
pp−s(t), and then thepreceding platoon sends an emergency message with thetraffic flow and the traffic density of the precedence, qpp(t)and kpp(t), to notify the succeeding platoon leader. Then,by using the traffic analysis in Eqn. (2), we can obtainthe shockwave moves from the preceding platoon to thesucceeding platoon with the speed of WV
pp−s(t). Thus,the affected range of the shockwave at time t, denoted byWR
pp−s(t), can be determined by the shockwave speed,
WVpp−s(t), and the time headway, which is the elapsed
time between the time one vehicle finishes passing a fixedobservation point and the instant the next vehicle starts topass that point
WRpp−s(t) = WV
pp−s(t)
·xV pp,PMi
(t)− xV ps,PLj
(t)− savg.
xV ps,PLj
(t).
(9)
In Eqn. (9), xV pp,PLi
(t) and xV ps,PLj
(t) represent the
geographical locations of vehicles V pp,PMi and V ps,PL
j attime t, respectively, xV ps,PL
j(t) denotes the velocity of
vehicle V ps,PLj at time t, and savg denotes the average
vehicle length.After obtaining the shockwave affection range, the
time required for the emergency message transmission
from the vehicle detecting the shockwave to thesucceeding platoon can be computed by the hop-to-hoptransmission delay (Dh2h),
Dh2h = (Daccess +Dtrans.) ·⌈WR
pp−s(t)
T rangex
⌉, (10)
where Trangex is the wireless transmission range,⌈
WRpp−s(t)/T
rangex
⌉is the number of hops and the
transmission time of a single wireless hop at time tconsisting of two parts: (Daccess +Dtrans.). Note that,in the single hop transmission time, we only considerthe access delay Daccess and the packet transmissiondelay Dtrans, but neglect the queueing delay Dqueue, thepropagation delay Dpropagation and the processing delayDprocessing because they are too small.
The access delay Daccess and the packet transmissiondelay Dtrans are determined as follows. First, forDaccess, we assume that CAD VANET adopts IEEE802.11p with the Enhanced Distributed Channel Accessas the wireless interface. EDCA uses CSMA/CA as thechannel contention access mechanism. We assume that apacket before successful transmission exhibits an averagenumber of contentions (including the first transmissionand the number of re-transmissions), as denoted by γavg.In a contention, the contention delay consists of the AIFSperiod and the backoff-time. As a result, the access delayDaccess can be formulated by (IEEE, 2005)
Daccess =γavg. · (Backoff Time + AIFS)
=γavg. · [(Random() · τslot)
+ (AIFSN · τslot + 2 · τslot)]
=γavg. · [τslot (Random() + AIFSN + 2)] , (11)
where Random() denotes the randomly waiting delay andγavg = pavg
c γmax · pavgc is the average collision probability
while γmax is the maximum retry limit. Moreover,AIFSN uses two slots. Note that one slot time is 16μsin IEEE 802.11p (Ozturk and Misic, 2011).
Second, for Dtrans, it can be determined by Dtrans. =1/T rate
x , where l means the packet lengths in bits and T ratex
means the wireless transmission rate.Finally, the PL of the succeeding platoon moves the
distance required for the transmission of a synchronousmessage from the preceding vehicle or platoon by
dSync
V ps,PLj
= Dh2h · xV ps,PLj
(t). (12)
Note that, in the analysis, the average collisionprobability, pavg
c , is randomly determined. That is,the access delay and the transmission delay have beenconsidered, and the connectivity of packet transmissionis analysed. Clearly, the hop-to-hop transmission delay isnot a fixed robust one.

Cooperative adaptive driving for platooning autonomous self driving . . . 219
In Fig. 5, the idea of APS is to synchronize thevelocity change of each PM within platoon p. Threekey factors: (i) determining the dynamic platoon lengthaccording to the hop delay, (ii) computing the nextsynchronization time, and (iii) synchronizing the platoonvelocity, should be solved for achieving APS successfully.
First, the message transmission time is limited
according to the driving time for the PL(V p,PLj
)with a
velocity of xV p,PLj
(t) as
(Daccess +Dtrans)
⌈Lp(t+ 1)
Trangex
⌉≤
dSync
V p,PLj
(t)
xV p,PLj
(t), (13)
where Lp(t + 1) means the platoon length at time t and(Daccess +Dtrans) denotes one hop delay. As a result, theplatoon length Lp(t+ 1), is described as
Lp(t+ 1) ≤dSync
V p,PLj
(t) · T rangex
xV p,PLj
(t) · (Daccess +Dtrans). (14)
Second, after obtaining the platoon length, thesynchronization for the next time for PMs of platoon p,denoted by τSync
V p,PLj
, can be determined by a PL,
τSync
V p,PLj
= Tcurr +dSync
V p,PLj
(t)
xV p,PLj
(t), (15)
where Tcurr is the current time when the platooncontrol message is sent. Note that the synchronizationinformation sent by the platoon leader includes: (i)the platoon ID, (ii) the PL ID and position, (iii)synchronization time τSync
V p,PLj
, and (iv) limited speed
vmaxp
(τ
Sync
V p,PLj
). Note that the synchronization length should
be shorter than the shockwave affection range.Consequently, the adaptive platoon velocity for Vj at
the next synchronization time, τSync
V p,PLj
, xVj
(τSync
V p,PLj
), can be
obtained,
xvj
(τSync
V p,PLj
)= xvJ (t) + aVj ·Δt, (16)
where Δt represents the time interval of synchronization.The algorithm of Phase 2 (SAD) is demonstrated asAlgorithm 2.
3.3. Phase 3: Adaptive time to collision (ATC) anal-ysis. After synchronizing platoon driving, the negativeimpact of shockwave is reduced significantly. Now,in Phase 3, computation of the adaptive time tocollision (ATC) is proposed for two adjacent platoonsor vehicles. By using the cloud computing/MEC-based
eNB
Hop 1
Suddenly
brakes
ahead
Platoon Members (PM)
*Note that the PMs synchronously adjust speed at synchronization time point according to the instruction of PL.
time t
.sp PL,s
j
Sync
Vj
time
Hop 2
Platoon Leader (PL)
The upstream (or successor) platoon
2. Synchronization Message
1. Maximum length for synchronization
.sss PLp ,,sss
j
SyncSySy
Vj GC
TIC
Shockwave
Wireless rangeWireless Range
t
Fig. 5. Adaptive platoon synchronization in CAD.
Algorithm 2. Phase 2: Shockwave-avoidance driving(SAD) P2 SAD(·).1 if(v = PL) //if Vehicle v is the PL.2 P maxV←Compute P maxVel(p, v); //Eqn. (4)3 P minV←Compute P minVel(p, v); //Eqn. (5)4 d Res←Compute d Response(p, v); //Eqn. (7)5 d Brake←Compute d Brake(p, v); //Eqn. (8)6 d Syn←Compute d Syn(p, v); //Eqn. (12)7 d Safe← d Res + d Brake + d Syn; //Eqn. (6)8 P Len←Compute P Len(p, v); //Eqn. (14)9 P SynVel←Compute P Vel(p, v); //Eqn. (15)10 P SynTime←Compute P SynTime(p, v);
//Eqn. (16)11 V2X P Driving(p, v, P SynV el, P SynT ime);
// PL Tx12 UL P Driving(p, v);
//Upload Platoon driving to GC
ATC computing mechanism, each platoon and vehicleequipped with the system can accurately receive the TTC,and then the dynamic controls the platoon velocity toachieve safe driving by minimizing driving threats.
In the macroscopic view point, theroad/traffic/platoon information gathered from thevehicular cloud, MEC and the global cloud is adopted asthe input parameter for threaten analysis. In Phase 3, theadaptive time to collision of all directly adjacent platoonsand vehicles is analyzed according to the sensed/gatheredinformation received from the cloud/MEC.
Assume that the target vehicle i is on road r, andthen the average velocity
(xri
), location (or point) and
travel time (tri ) of vehicle i can be determined below. Theaverage velocity of vehicle i on road r can be determinedby
xri = μr(1− ρr), (17)
where μr is the maximum safe speed of road r and ρr isthe traffic density (0 ≤ ρr ≤ 1). A higher traffic densityleads to a slower average speed, and vice versa. The travel

220 B.-J. Chang et al.
Travel tim
e
Acceleration
Location
,r r TH,
r i j i,,
r
ittC j
tti j,i
,r r TH,
r i j i,
ri ji j
,r r TH,
r i j i,i ji ji ji j,r r TH,
r i j i,i ji ji j
,r r TH,
r i j i,i ji jrri ji j
Fig. 6. Threat classifications of the relative parameters of thevelocity, location (or point) and travel time.
time of a vehicle on road r can be determined by
tri =dr
xri
, (18)
where dr is the length of road r.Based on the threat analysis by Brannstrom et al.
(2013), the relative parameters of acceleration, location(or point) and the travel time of the target vehiclei and the adjacent vehicle j can be obtained, asdenoted by Relative parameters:
{dri,j , x
ri,j , t
ri,j
}, and
they can be adopted to classify the threat degree.Then, extended from set invariance theory (Falconeet al., 2011), the thresholds of the relative parametersof target vehicle i can be analyzed and defined as
Thresholds:{dr,THi , xr,TH
i , tr,THi
}, e.g., dr,TH
i denotes the
relative distance threshold of the target vehicle i on roadr, etc.
Figure 6 shows the threat threshold curves on therelative parameters’ axes (i.e., velocity, location and traveltime) belonging to the normal distribution. When theparameter value is less than the threshold (i.e., it isinside the curve), the threat exceeds the threshold. Forexample, in Fig. 3, for the case of the relative distancebetween vehicles i and j on road r (denoted as dri,j), thethreat caused by location can be derived based on thenormal distribution. Thus, we can determine the distancethreshold (denoted by dr,TH
i ), and then define the threat
probability caused by location as pr{dri,j ≤ dr,TH
i
}.
Figure 6 can be adopted to determine the threatscaused from the location (or point), the travel time, andthe velocity. Based on Bayesian risk theory (Jansson andGustafsson, 2008), we define the threat index (namely, TI)
that consists of these three impact factors of the relativeparameters of acceleration, location (or point) and travel
time, i.e., gdri,j
t (t), gxri,j
t (t) or gtri,jt (t), where gt(t) ∈
{0, 1}. The threat index is defined as
TI =gdri,j
t (t) + gxri,j
t (t) + gtri,jt (t)
3. (19)
The impact factors, gdri,j
t (t), gxri,j
t (t), and gtri,jt (t), are
gdri,j
t (t) �
⎧⎨⎩pr
{dri,j ≤ dr,TH
i |X0:n
}
pr
{dri,j > dr,TH
i |X0:n
} > cdri,j
⎫⎬⎭ , (20)
gxri,j
t (t) �
⎧⎨⎩pr
{xri,j > xr,TH
i |Y0:n
}
pr
{xri,j = xr,TH
i |Y0:n
} > cxri,j
⎫⎬⎭ , (21)
gtri,jt (t) �
⎧⎨⎩pr
{tri,j ≤ tr,TH
i |Z0:n
}
pr
{tri,j > tr,TH
i |Z0:n
} > ctri,j
⎫⎬⎭ . (22)
For instance, in Eqn. (20), gdri,j
t (t) will be set to 1 if thethreat probability of dri,j (i.e., pr
{dri,j ≤ dr,TH
i |X0:n
})
over the non-threat probability of dri,j (i.e., pr{dri,j >
dr,THi |X0:n
}) is greater than the risk cost of the relative
distance, cdri,j . Otherwise, g
dri,j
t (t) is set to zero.In Eqns. (19)–(22), the risk cost of each impact
factor (denoted by cdri,j , cx
ri,j or ct
ri,j ) is adopted to decide
whether the threat caused by the impact factor (i.e., dri,j ,xri,j or tri,j) is high or low. The risk cost is defined
according to the product of the probability normal densityvalue and non-threat probability. For the case of therelative distance, we define the situation H1 is dri,j ≤dr,THi ) (i.e., H1 = dri,j ≤ dr,TH
i ) and the situation H2
is dri,j > dr,THi ) (i.e., H2 = dri,j > dr,TH
i ), and bothoccur according to normal distributions. Thus, the riskcost (cd
ri,j ) of dri,jcan be defined,
cdri,j = p (H1|H2) · p (H2) , (23)
where
p (H1|H2)
=p (H1, H2)
p (H2)
=1√
2πσ2
√1− ρ2
· exp(− 1
2
(H2 −
[μ2 + ρσ2
σ1(H1 − μ1)
]2σ2
√1− ρ2
)).
(24)
From the threat classification, one of the importantfactors is the time to collision (TTC). It specifies that the

Cooperative adaptive driving for platooning autonomous self driving . . . 221
riNi
collision
collision
collision
collision
oooCase (a)
Case (b)
Case (c)
Case (d)
Fig. 7. Examples of determining TTC.
target vehicle will be hit on by the threat vehicle i+1whenthe TTC expires, if the target vehicle does not employ anythreat avoidance mechanism. The TTC can be adoptedas the final escape time for the target vehicle i. It can bedetermined by the Newton laws of motion. Before that,we need to determine the relative acceleration ai,i+1 by
(xcfi,i+1
)2=xinit
i,i+1(t)2 + 2ai,i+1di,i+1,
∵ xcfi,i+1 =0 //After collision, the final
relative velocity is 0.
∴ ai,i+1 =−xinit
i,i+1(t)2
2di,i+1. (25)
Since these two vehicles move continuously along theirmoving paths (i.e., their trajectories) on the same lane, theTTC can be determined as
TTCi,i+1 =di,i+1
xi,i+1(t) +√xi,i+1(t)2 + 2di,i+1ai,i+1
=di,i+1
xi,i+1(t), (26)
where√xi,i+1(t)2 + 2di,i+1ai,i+1 is the final velocity.
For example, Fig. 7 demonstrates their TTCs of fourdifferent cases. In Cases (a) and (b), the relative distance(i.e., two vehicles or platoons) is 50 m. Since Case(a) deals with a slower relative velocity, Case (a) yieldsa longer TTC. Cases (c) and (d) have a longer relativedistance, TTCs of Cases (c) and (d) are longer than thoseof Cases (a) and (b). In Case (a), the TTC is determinedby 50 [m]/(20 · 1000/3600) = 9 [sec].The consecutive steps of Phase 3 (ATC) are presented inAlgorithm 3.
4. Numerical results
In this section, the proposed CAD approach is evaluatedby comparing it with several important techniques:
Algorithm 3. Phase 3: Adaptive time to collisionanalysis (ATC) P3 ATC(·).1 if(v=PL || non-P-vehicle) //if v is PL or non-platoonvehicle.
2 TI←Compute Threat Index(p, v, g d, g v, g t);//Eqn. (19)
3 c←Compute RiskCost(p, v); //Eqn. (23)4 TTC←Compute TTC(p, v); //Eqn. (26)
integrated full-range speed assistance (IRSA) (Wilminket al., 2007), intelligent driver model (IDM) (Treiberet al., 2000), and human driving (HUMAN). IRSA modelsthe driving behavior extended from CACC and determinesthe driving velocity according to the average velocity ofthree preceding vehicles. The IDM models the drivingbehavior extended from ACC and considers the 1.5 secondtime headway. In the HUMAN driving model, weconsider some parameters: (i) delayed response time, (ii)random response time (12 seconds) for determining thecar-following distance, etc., to simulate driving behaviors
0
100
200
300
400
500
600
700
800
900
1000
0
10
20
30
40
50
60
70
80
90
100
110
120
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Po
siti
on
(m)
Vel
oci
ty(k
m/h
)
Time(s)
Velocity
Position
(a) HUMAN
0
100
200
300
400
500
600
700
800
900
1000
0
10
20
30
40
50
60
70
80
90
100
110
120
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Po
siti
on
(m)
Vel
oci
ty(k
m/h
)
Time(s)
Velocity
Position
(b) IRSA
0
100
200
300
400
500
600
700
800
900
1000
0
10
20
30
40
50
60
70
80
90
100
110
120
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Posi
tion
(m)
Vel
oci
ty(k
m/h
)
Time(s)
Velocity
Position
(c) CAD
Fig. 8. Velocity joint position trajectory.

222 B.-J. Chang et al.
by (MicroSim, 2018).The evaluated network model is a two-lane
one-kilometer-long road, in which the average vehiclelength is set to 6 meters and the minimum distance ofthe standstill vehicle is set to 3 meters. In the trafficmodel, the incoming vehicles initiated at the start-endpoint are generated by the Poisson distribution with arrivalrate (Thompson, 2001), and the inter-vehicle distanceis formulated by the IDM with the continuous function(Treiber et al., 2000). The vehicle mobility model isgenerated by the normal distribution with the averagevelocity and variance (Tacq, 2010), where the averagevelocity of evaluations is generated between 80 and 110km/h.
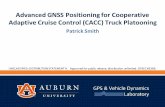
Figures 8(a)–(c) demonstrate the velocity jointposition trajectory results affected by shockwaves amongall compared approaches (CAD, ISRA, and HUMAN),in which the sudden braking events happen at the 60thsecond. In Fig. 8(a), in the case of HUMAN, the suddenlybraking results in all vehicles decreasing their velocitiesduring the time interval from 60 to 125 [s]. Moreover,the event leads to the butterfly effect that decreases thevelocity of all affected vehicles to 0 km/h during the timeinterval from 125 to 180 [s]. In Fig. 8(b), in the caseof IRSA, a vehicle refers to the velocities of (at most)three adjacent leading vehicles. The following vehiclescan thus decrease their velocity priorly. The velocitiesof all vehicles are all above 14 km/h. However, withoutcooperation, the velocities of the following vehicleschange inconsistently, which results in unstable driving.In Fig. 8(c), CAD adopts the cooperative platoon-basedcontrol. The velocities of the following vehicles changeconsistently, even though it exhibits a suddenly brakingat t = 60 [s] and only affects a consistent velocitydecreasing during the time interval from 60 to 70 [s].Then, the following vehicles restore the velocities up to70 km/h. That is, CAD can effectively avoid the butterflyeffects resulting from a suddenly braking.
Figures 9(a)–(b) show the 3D of the velocity jointposition trajectory results of ISRA and CAD, in whichthe sudden braking events happen at every interval of60 [s]. In Fig. 9(a), ISRA yields obvious velocitychanges while exhibiting sudden brakes. IRSA suffersfrom asynchronous changes of the velocities of neighborvehicles, and then significantly decreases the velocitywhile exhibiting shockwaves. In Fig. 9(b), CADoutperforms ISRA in the avoidance of butterflies, so the3D trajectory of CAD is changed smoothly. The reason isthe platoon-based CAD adaptively determines the platoonvelocity and the safe distance for platoon synchronization.
Figure 10 compares the number of shockwaves underdifferent traffic loads ranging from 1 to 5 Erlangs. CADyields no shockwaves, but HUMAN yields the highestnumber of shockwaves. Furthermore, IRSA yields a fewernumber of shockwaves than IDM. Moreover, the number
(a) IRSA
(b) CAD
Fig. 9. 3D velocity joint position trajectory.
of shockwaves of all compared approaches (except CAD)increases as the traffic load increases.
Figure 11 compares the average vehicle velocitiesof all compared approaches under different traffic loadsranging from 1 to 5 Erlangs. The velocities of allapproaches decrease as the traffic load increases. CADyields a higher velocity, but HUAMN and IDM yield alower one. The reason is that CAD exhibits a stablevelocity by using cooperative platoon-based driving,so the vehicles synchronously change their velocities.However, HUMAN and IDM lack the cooperative CACCmechanism; the vehicle velocity is changed inconsistentlyand results in unstable velocity and a lower averagevelocity.
Figure 12 demonstrates the TTCs of simulation andanalysis of the proposed CAD approach under a vehicle

Cooperative adaptive driving for platooning autonomous self driving . . . 223
0
1
2
3
4
5
6
1 2 3 4 5
Nu
mb
er o
f sh
ock
waves
Traffic load(Erlang)
CAD
IRSA
IDM
HUMAN
Fig. 10. Number of shockwaves under different traffic loads.
0
10
20
30
40
50
60
70
80
90
100
1 2 3 4 5
Av
erage
veh
icle
vel
oci
ties
(km
/h)
Traffic load(Erlang)
CAD
IRSA
IDM
HUMAN
Fig. 11. Average vehicle velocities under different traffic loads.
Fig. 12. TTCs of simulation and analysis [s].
velocity of 60 km/h. The TTCs of simulation and analysisare very close, which can justify the correctness of theanalytical model. Moreover, the TTCs of both simulationand analysis decrease as the evaluation time increases.The reason is the number of vehicles on roads increases,and then decreases the inter-vehicle (or platoon) distanceand reduces TTC.
5. Conclusions and future works
The intelligent transportation system aims to achieveactively safe driving, lower travel times, stable vehiclevelocities, etc. Without using cooperative-based activesafe driving, the above-mentioned objectives are difficultto fulfill. However, the cooperative active safe drivingmechanism suffers from sudden braking, which easilyleads to butterfly effects and brings several challenges:
shockwaves, unstable driving, unsafe driving, long traveltimes, etc. Therefore, this paper proposed the mobile edgecomputing-based CAD approach to minimize butterflyeffects and shockwaves, and then achieve active safedriving.
The main contributions of CAD include (i) adaptivedetermining of the platoon velocity according to the trafficinformation, (ii) determining the safe distance for platoonsynchronization, (iii) adaptive determining of the platoonlength, (iv) avoiding butterfly effects and shockwaves, etc.Numerical results demonstrate that the CAD outperformsthe compared approaches in the number of shockwavesand average velocity. In addition, CAD is able todetermine the adaptive platoon length according to trafficinformation gathered from the global and local clouds.Many aspects of analyzing cooperative adaptive platoondriving require a further study. For instance, we arecurrently extending our model to analyze butterfly effectsand shockwaves of dynamic traffic involved in ITSnetworks cooperating with 5G, MEC, and Cloud.
Acknowledgment
This research was supported in parts by the Ministry ofScience and Technology of Taiwan, ROC, under the grants
• MOST-106-2221-E-194-021-MY3,
• MOST-107-2221-E-224 -009-MY2,
• MOST-105-2221-E-224-031-MY2,
• MOST-106-2511-S-252-001, and
• MOST-106-3011-F-252-001.
References3GPP (2019). Study on NR Vehicle-to-Everything (V2X), 3GPP
Specification 38.885.
Abuelela, M. and Olariu, S. (2010). Taking VANET to theclouds, Proceedings of the International Conference onAdvances in Mobile Computing and Multimedia, Paris,France, pp. 6–13.
Asadi, B. and Vahidi, A. (2011). Predictive cruisecontrol: Utilizing upcoming traffic signal informationfor improving fuel economy and reducing trip time,IEEE Transactions on Control Systems Technology19(3): 707–714.
Brannstrom, M., Sandblom, F. and Hammarstrand, L. (2013). Aprobabilistic framework for decision-making in collisionavoidance systems, IEEE Transactions on IntelligentTransportation Systems 14(2): 637–648.
Burke, M. and Williams, J. (2012). Cooperative ITSregulatory policy issues, Discussion paper, AustraliaNational Transport Commission, pp. 1–77.

224 B.-J. Chang et al.
Chang, B.-J., Tsai, Y.-L. and Liang, Y.-H. (2017). Platoon-basedcooperative adaptive cruise control for achieving activesafe driving through mobile vehicular cloud computing,Wireless Personal Communications 97(4): 5455–5481.
Chen, S., Hu, J., Shi, Y. and Zhao, L. (2016). LTE-V: ATD-LTE-based v2x solution for future vehicular network,IEEE Internet of Things Journal 3(6): 997–1005.
Desjardinsand, C. and Chaib-draa, B. (2011). Cooperativeadaptive cruise control: A reinforcement learningapproach, IEEE Transactions on Intelligent TransportationSystems 12(4): 1248–1260.
Dinh, T.Q., Tang, J., La, Q.D. and Quek, T.Q.S. (2017).Offloading in mobile edge computing: Task allocation andcomputational frequency scaling, IEEE Transactions onCommunications 65(8): 3571–3584.
Falcone, P., Ali, M. and Sjoberg, J. (2011). Predictive threatassessment via reachability analysis and set invariancetheory, IEEE Transactions on Intelligent TransportationSystems 12(4): 1352–1361.
Geroliminis, N. and Skabardonis, A. (2011). Identificationand analysis of queue spillovers in city street networks,IEEE Transactions on Intelligent Transportation Systems12(3): 1107–1115.
Gomes, A.S., Sousa, B., Palm, D.V., Fonseca, A., Zhao,Z., Monteiro, E., Braun, T., Simoes, P. and Cordeiro,L. (2017). Edge caching with mobility prediction invirtualized LTE mobile networks, Future Generation Com-puter Systems 70(1): 148–162.
Helbing, D. (2001). Traffic and related self-driven many-particlesystems, Reviews of Modern Physics 73(4): 1067–1141.
Huang, C.-L., Fallah, Y., Sengupta, R. and Krishnan, H.(2010). Adaptive intervehicle communication control forcooperative safety systems, IEEE Network 24(1): 6–13.
Hwang, R.-H., Chang, B.-J., Tsai, Y.-L. and Liang, Y.-H.(2017). Mobile edge computing-based vehicular cloud ofcooperative adaptive driving for platooning autonomousself driving, Proceedings of IEEE SC2 2017, Kanazawa,Japan, pp. 33–39.
IEEE (2005). Part 11: Wireless LAN medium accesscontrol (MAC) and physical layer (PHY) specificationsamendment: Medium access control (MAC) qualityof service enhancements, Technical report, IEEE Std.802.11e, IEEE, Piscataway, NJ.
IEEE (2011). IEEE standard for information techno-logy-telecommunication and information exchangebetween systems-local and metropolitan areanetworks-specific requirements, Technical report, IEEEStd. 802.11p, IEEE, Piscataway, NJ.
IEEE (2013). IEEE trial-use standard for wireless access invehicular environments (wave)—multi-channel operation,Technical report, IEEE Std. P1609.4, IEEE, Piscataway,NJ.
ITS (2018). Intelligent transportation systems (ITS), USDepartment of Transportation, Washington, DC, http://www.its.dot.gov/.
Jansson, J. and Gustafsson, F. (2008). A framework andautomotive application of collision avoidance decisionmaking, Automatica 44(9): 2347–2351.
Kuhne, R. and Michalopoulos, P. (1997). Continuum flowmodels, in N.H. Gartner et al. (Eds.), Traffic Flow Theory:A State of the Art Report—Revised Monograph on TrafficFlow Theory, Oak Ridge National Laboratory, Oak Ridge,TN.
Lorenz, E. (1963). Deterministic nonperiodic flow, Journal ofthe Atmospheric Sciences 20(2): 130–141.
Maag, C., Muhlbacher, D., Mark, C. and Kruger, H.-P. (2012).Studying effects of advanced driver assistance systems(ADAS) on individual and group level using multi-driversimulation, IEEE Intelligent Transportation Systems Mag-azine 4(3): 45–54.
MicroSim (2018). Microsimulation of road traffic flow, http://www.traffic-simulation.de/.
Milanes, V., Alonso, J., Bouraouiand, L. and Ploeg, J. (2011a).Cooperative maneuvering in close environments amongcybercars and dual-mode cars, IEEE Transactions on In-telligent Transportation Systems 12(1): 15–24.
Milanes, V., Godoy, J., Villagra, J. and Perez, J. (2011b).Automated on-ramp merging system for congested trafficsituations, IEEE Transactions on Intelligent Transporta-tion Systems 12(2): 500–508.
Mitropoulos, G.K., Karanasiou, I.S., Hinsberger, A.,Aguado-Agelet, F., Wieker, H., Hilt, H.-J., Mammarand,S. and Noecker, G. (2010). Wireless local danger warning:Cooperative foresighted driving using intervehiclecommunication, IEEE Transactions on Intelligent Trans-portation Systems 11(3): 539–553.
MOTC (2018). Ministry of Transportation and Communications(MOTC), Taipei, http://www.iot.gov.tw/.
Mousannif, H., Khalil, I. and Moatassime, H.A. (2011).Cooperation as a service in VANETs, Journal of Univer-sal Computer Science 17(8): 1202–1208.
Ozturk, S. and Misic, J. (2011). On non-saturation regime inIEEE 802.11p based VANET with mobile nodes, Proceed-ings of IEEE PIMRC, Toronto, Canada, pp. 740–744.
Papadimitratos, P., La Fortelle, A., Evenssen, K., Brignolo,R. and Cosenza, S. (2009). Vehicular communicationsystems: Enabling technologies, applications, and futureoutlook on intelligent transportation, IEEE Communica-tions Magazine 47(11): 84–95.
Pauwelussen, J. and Feenstra, P.J. (2010). Driver behavioranalysis during ACC activation and deactivation in areal traffic environment, IEEE Transactions on IntelligentTransportation Systems 11(2): 329–338.
Satria, D., Park, D. and Jo, M. (2017). Recovery for overloadedmobile edge computing, Future Generation Computer Sys-tems 70(1): 138–147.
Schakel, W., Arem, B. and Netten, B. (2010). Effects ofcooperative adaptive cruise control on traffic flow stability,Proceedings of IEEE Conference on Intelligent Trans-portation Systems, ITSC 2016, Rio de Janeiro, Brazil,pp. 759–764.

Cooperative adaptive driving for platooning autonomous self driving . . . 225
Somda, F. and Cormerais, H. (2011). Auto-adaptive and stringstable strategy for intelligent cruise control, IET IntelligentTransport Systems 5(3): 168–174.
Stevenson, R. (2011). A drivers sixth sense, IEEE Spectrum48(10): 50–55.
Tacq, J. (2010). The normal distribution and its applications, inE. Baker et al. (Eds.), International Encyclopedia of Edu-cation, 3rd Edition, Elsevier Science, Amsterdam.
Taleb, T., Benslimane, A. and Letaief, K. (2010). Towardan effective risk-conscious and collaborative vehicularcollision avoidance system, IEEE Transactions on Vehic-ular Technology 59(3): 1474–1486.
Thompson, W.J. (2001). Poisson distributions, Computing inScience and Engineering 3(3): 78–82.
Treiber, M., Hennecke, A. and Helbing, D. (2000). Congestedtraffic states in empirical observations and microscopicsimulations, Physical Review E62 10(1103): 1805–1824.
Wilmink, I.R., Klunder, G.A. and Arem, B. (2007). Traffic floweffects of integrated full-range velocity assistance (IRSA),Proceedings of IEEE Intelligent Vehicles Symposium, IVS2007, Istanbul, Turkey, pp. 1204–1210.
Ben-Jye Chang received the PhD degree in com-puter science and information engineering fromNational Chung-Cheng University, Taiwan, in2001 and the MSc degree in computer engineer-ing from the University of Massachusetts, Low-ell, USA, in 1992. He is currently a distinguishedprofessor of the Department of Computer Sci-ence and Information Engineering (CSIE), Na-tional Yunlin University of Science and Tech-nology, Yunlin, Taiwan. He was the chair of
the CSIE Department in 2011–2014. In 2008 he was also the chairof the CSIE Department of the Chaoyang University of Technology,Taichung, Taiwan, which he joined in 2002. His research interests in-clude 5G cooperative communication, 4G LTE/LTE-A, optimal cooper-ative communication, relaying and small cell technologies, cloud com-puting, SDN/NFV-based flow networking, mobile edge computing, 5GWiFi, cloud active safe driving, IoT/IoV, cross layer-based mechanism,wireless real-time transmission congestion control, and QoS-based wire-less relay-based cooperative networking.
Ren-Hung Hwang received his PhD degree incomputer science from the University of Mas-sachusetts, Amherst, USA, in 1993. Then hejoined the Department of Computer Science andInformation Engineering, National Chung ChengUniversity, Chia-Yi, Taiwan, where he is now adistinguished professor. He served as the deanof the College of Engineering in 2014–2017. Heis currently on the editorial boards of the Jour-nal of Information Science and Engineering and
the International Journal of Ad Hoc and Ubiquitous Computing. Prof.Hwang has published more than 200 international journal and confer-ence papers. He is also a co-author of the textbook Computer Networks:An Open Source Approach (www.mhhe.com/lin), with Ying-Dar Linand Fred Baker (McGraw-Hill, 2011). He received the IEEE Best PaperAward at IEEE SC2 2017 and IEEE IUCC 2014, and the IEEE Outstand-ing Paper Award at IEEE IC/ATC/ICA3PP 2012. His current research in-terest is in the Internet of things, cloud computing, and software definednetworks.
Yueh-Lin Tsai received his MSc degree in com-puter science and information engineering fromthe National Yunlin University of Science andTechnology, Taiwan, in 2013. His current re-search interests include platoon-based active safedriving analysis, intelligent transportation mech-anisms, radio resource management of cellularcommunications, and 4G LTE-advanced technol-ogy.
Bo-Han Yu received his MSc degree in infor-mation and communication engineering from theNational Yunlin University of Science and Tech-nology, Taiwan, in 2014. His current research in-terests include wireless networking, performanceanalysis and 4G LTE-advanced technology.
Ying-Hsin Liang received the MSc degreein electrical engineering from the University ofMassachusetts, Lowell, USA, in 1993 and thePhD degree in industrial education and technol-ogy from the National Changhua University ofEducation, Changhua, Taiwan, in 2005. She iscurrently a full professor with the Departmentof Multimedia Animation and Application, NanKai University of Technology, Taiwan, which shejoined in 1993. Her research interests include
wireless networking, mobile communications, technological and engi-neering education, web-based and multimedia learning, and gerontech-nology.
Received: 31 July 2018Revised: 1 January 2019Accepted: 1 February 2019