Adaptive Random Access for Cooperative Spectrum
10
IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015 831 Adaptive Random Access for Cooperative Spectrum Sensing in Cognitive Radio Networks Dong-Jun Lee, Member, IEEE Abstract—In this paper, an adaptive cooperative spectrum sens- ing scheme using random access is proposed in a cognitive radio network. Although cooperative spectrum sensing improves the performance of spectrum sensing considerably, the problem of how to collect sensing data should be solved for the implementa- tion of the cooperative sensing. This is not an easy problem because complicated coordination between secondary users paprticipating in the cooperative sensing is required. This study addresses this problem in an environment of unequal SNR values of primary user signal at the secondary users. In the proposed scheme, random access is used to collect the spectrum sensing data of the secondary users during collection period and the length of the collection pe- riod is determined adaptively based on the sensing data collected so far. Thus, complex slot management for the collection of the sensing data is not necessary. This adaptive determination of the collection period is formulated as a finite-horizon decision prob- lem. Backward induction approach is employed to decide the opti- mal stopping time of the collection period. In addition, a heuristic algorithm is proposed, which almost equals the performance of the backward induction method and whose time complexity is much smaller than the backward induction scheme. Analysis of the proposed scheme is also provided. Numerical results show that the proposed scheme performs much better than other conventional methods. Index Terms—Backward induction, cognitive radio, cooperative spectrum sensining, finite-horizon decision, random access. I. I NTRODUCTION I N cognitive radio networks, frequency channels allocated to but not used by primary users are searched and used by secondary users [1]. Secondary users perform spectrum sensing to determine whether any primary user signal exists or not before transmitting their data in a frequency channel. Spectrum sensing time is generally not negligible and it is important to reduce the spectrum sensing time as much as possible while satisfying required spectrum sensing performance. Cooperative spectrum sensing has been considered to combat the effect of fading on the detection of primary user signal, to reduce the spectrum sensing time or to improve the perfor- mance of spectrum sensing. There are two main approaches in the cooperative spectrum sensing, i.e., decision-fusion and Manuscript received March 11, 2014; revised July 18, 2014 and September 10, 2014; accepted September 11, 2014. Date of publication September 30, 2014; date of current version February 6, 2015. This work was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2012R1A1A2008169). The associate editor coordinating the review of this paper and approving it for publication was W. Zhang. The author is with the School of Electronics, Telecommunication and Computer Engineering, Korea Aerospace University, Goyang 412-791, Korea (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TWC.2014.2360857 soft combining of sensing data. In the decision-fusion approach, sensing decisions of secondary users are combined to produce the final sensing decision. In the soft combining approach, spectrum sensing statistics of secondary users are combined to produce decision statistic which is used to produce the final sensing decision. Generally the soft combining method shows better performance than the decision-fusion method although with an increase of complexity. In [2], optimal voting rule is derived for the decision-fusion based cooperative spectrum sensing. In [3], the soft combining and decision-fusion methods are compared and the authors propose a new softened hard combination method which uses two-bit overhead for each user to achieve a tradeoff between performance and complexity. In the soft combining method, cooperative spectrum sensing problem is typically formulated as a nonlinear optimization problem where a linear combining vector is obtained. Typi- cally this is a nonconvex optimization problem and requires complicated solution approaches. In [4], the authors solve the problem and also propose a heuristic approach where a modified deflection coefficient characterizing the probability distribution function of the global test statistics is optimized. In [5], semidefinite programming approach is used to solve the optimization problem. In [6], a simpler algorithm based on the solution of a polynomial equation in one scalar variable is used to solve the optimization problem. In [7], the authors conduct multi-slot spectrum sensing and distributed cooperative spec- trum sensing, and in this regard use maximal ratio combining and obtain approximated optimal combining. Spectrum sensing has been typically studied with respect to the maximization of the throughput of secondary users. The tradeoff between the spectrum sensing time and the throughput is studied when cooperative spectrum sensing is used in cogni- tive radio networks [7]. In [9], optimal sensing parameters are derived to obtain the optimal channel capacity for single and multiple channel sensing cases. Some studies have adopted sequential approach in the coop- erative spectrum sensing [10]–[14]. In these studies, sequential probability ratio test (SPRT) with two decision thresholds is used and the main problem is how to determine the optimal stopping time of the sequential spectrum sensing. As stated above, cooperative spectrum sensing and the re- lated problems have been studied in many respects. However, it has been seldom studied how to collect the spectrum sensing data of secondary users for cooperative sensing although this is a critical problem in the practical implementation of the co- operative spectrum sensing. One possible method of collecting the sensing data is to assign each secondary user participating in the cooperative sensing an exclusive slot to transmit its 1536-1276 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
-
Upload
anonymous-qapuenbc4w -
Category
Documents
-
view
222 -
download
1
description
cooperative sensing
Transcript of Adaptive Random Access for Cooperative Spectrum

IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015 831
Adaptive Random Access for Cooperative SpectrumSensing in Cognitive Radio Networks
Dong-Jun Lee, Member, IEEE
Abstract—In this paper, an adaptive cooperative spectrum sens-ing scheme using random access is proposed in a cognitive radionetwork. Although cooperative spectrum sensing improves theperformance of spectrum sensing considerably, the problem ofhow to collect sensing data should be solved for the implementa-tion of the cooperative sensing. This is not an easy problem becausecomplicated coordination between secondary users paprticipatingin the cooperative sensing is required. This study addresses thisproblem in an environment of unequal SNR values of primary usersignal at the secondary users. In the proposed scheme, randomaccess is used to collect the spectrum sensing data of the secondaryusers during collection period and the length of the collection pe-riod is determined adaptively based on the sensing data collectedso far. Thus, complex slot management for the collection of thesensing data is not necessary. This adaptive determination of thecollection period is formulated as a finite-horizon decision prob-lem. Backward induction approach is employed to decide the opti-mal stopping time of the collection period. In addition, a heuristicalgorithm is proposed, which almost equals the performance of thebackward induction method and whose time complexity is muchsmaller than the backward induction scheme. Analysis of theproposed scheme is also provided. Numerical results show that theproposed scheme performs much better than other conventionalmethods.
Index Terms—Backward induction, cognitive radio, cooperativespectrum sensining, finite-horizon decision, random access.
I. INTRODUCTION
IN cognitive radio networks, frequency channels allocatedto but not used by primary users are searched and used by
secondary users [1]. Secondary users perform spectrum sensingto determine whether any primary user signal exists or notbefore transmitting their data in a frequency channel. Spectrumsensing time is generally not negligible and it is important toreduce the spectrum sensing time as much as possible whilesatisfying required spectrum sensing performance.
Cooperative spectrum sensing has been considered to combatthe effect of fading on the detection of primary user signal,to reduce the spectrum sensing time or to improve the perfor-mance of spectrum sensing. There are two main approachesin the cooperative spectrum sensing, i.e., decision-fusion and
Manuscript received March 11, 2014; revised July 18, 2014 andSeptember 10, 2014; accepted September 11, 2014. Date of publicationSeptember 30, 2014; date of current version February 6, 2015. This work wassupported by Basic Science Research Program through the National ResearchFoundation of Korea (NRF) funded by the Ministry of Education, Scienceand Technology (2012R1A1A2008169). The associate editor coordinating thereview of this paper and approving it for publication was W. Zhang.
The author is with the School of Electronics, Telecommunication andComputer Engineering, Korea Aerospace University, Goyang 412-791, Korea(e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TWC.2014.2360857
soft combining of sensing data. In the decision-fusion approach,sensing decisions of secondary users are combined to producethe final sensing decision. In the soft combining approach,spectrum sensing statistics of secondary users are combinedto produce decision statistic which is used to produce the finalsensing decision. Generally the soft combining method showsbetter performance than the decision-fusion method althoughwith an increase of complexity. In [2], optimal voting ruleis derived for the decision-fusion based cooperative spectrumsensing. In [3], the soft combining and decision-fusion methodsare compared and the authors propose a new softened hardcombination method which uses two-bit overhead for each userto achieve a tradeoff between performance and complexity.
In the soft combining method, cooperative spectrum sensingproblem is typically formulated as a nonlinear optimizationproblem where a linear combining vector is obtained. Typi-cally this is a nonconvex optimization problem and requirescomplicated solution approaches. In [4], the authors solvethe problem and also propose a heuristic approach where amodified deflection coefficient characterizing the probabilitydistribution function of the global test statistics is optimized.In [5], semidefinite programming approach is used to solve theoptimization problem. In [6], a simpler algorithm based on thesolution of a polynomial equation in one scalar variable is usedto solve the optimization problem. In [7], the authors conductmulti-slot spectrum sensing and distributed cooperative spec-trum sensing, and in this regard use maximal ratio combiningand obtain approximated optimal combining.
Spectrum sensing has been typically studied with respect tothe maximization of the throughput of secondary users. Thetradeoff between the spectrum sensing time and the throughputis studied when cooperative spectrum sensing is used in cogni-tive radio networks [7]. In [9], optimal sensing parameters arederived to obtain the optimal channel capacity for single andmultiple channel sensing cases.
Some studies have adopted sequential approach in the coop-erative spectrum sensing [10]–[14]. In these studies, sequentialprobability ratio test (SPRT) with two decision thresholds isused and the main problem is how to determine the optimalstopping time of the sequential spectrum sensing.
As stated above, cooperative spectrum sensing and the re-lated problems have been studied in many respects. However,it has been seldom studied how to collect the spectrum sensingdata of secondary users for cooperative sensing although thisis a critical problem in the practical implementation of the co-operative spectrum sensing. One possible method of collectingthe sensing data is to assign each secondary user participatingin the cooperative sensing an exclusive slot to transmit its
1536-1276 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

832 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015
sensing data. This method, however, requires a complicatedand continuous management of the allocated slots. Especiallywhen secondary users change their locations continually orcoopearive spectrum sensing is used in an ad-hoc network,it would be quite demanding to manage the allocation of theslots. Another method more plausible is to use random accessapproach for collecting the sensing data. In this approach,exclusive slots are not allocated to secondary users for thereport of the sensing data. Instead secondary users report theirsensing data in a random manner.
Many studies on cognitive radio MAC have considered usingrandom access based on the RTS (Request To Send)/CTS (Clearto Send) exchange of the IEEE 802.11 [15]–[19]. Secondaryusers check primary user signal and use the RTS/CTS exchangebefore transmitting data [15]. With the RTS/CTS exchange, itcan be guaranteed that interference to primary user signal issuppressed and also secondary users avoid collision. In [16],3-phase RTS/CTS exchange is proposed. In the first phase, twosecondary users exchange C-RTS/C-CTS messages for conten-tion and spectrum reservation and other secondary users hear-ing these messages are kept from accessing the medium. In thesecond phase, the secondary users exchange channel availabi-lity information using S-RTS/S-CTS messages. Finally, T-RTS/T-CTS messages notify the completion of data transmission.
Although random access has been used widely in typicalwireless networks including cognitive radio networks for ac-quisition of the opportunity to transmit data, to the best of ourknowledge it has not been used for collecting the sensing datafor the cooperative spectrum sensing. This study addresses theuse of random access for collecting the spectrum sensing data.
In our previous study, the function of the RTS packet isextended so that it is used for cooperative spectrum sensing[20]. In the study, several SRTS(Sensing data and RequestTo Send) packets carrying sensing data are collected during afixed collection period. The average number of SRTS packetscollected is determined by the length of the collection period.Thus the length of the collection period is predetermined bythe required sensing performance. This is called fixed collectionperiod method.
In our another study, the fixed collection period method isimproved by introducing the adaptation of the collection period[21]. In the adaptive collection period scheme, the optimalstopping time of the collection period is adaptively determinedbased on the SRTS packets collected so far. In each slot theexpected revenue of ending the collection period and that ofextending the collection period by one slot are compared, andthe action with the larger expected revenue is selected. This isan actually optimal stopping time problem with finite-horizondecision. Backward induction starting from the final states isused to derive the expected revenues of each slot [22], [23]. Thisadaptive collection scheme is studied in a situation in which allthe SNR values of primary user signal at the secondary usersare equal [21]. When the SNR values are equal, it is the numberof SRTS packets collected that determines the performance ofthe cooperative sensing.
In this study, the adaptive collection period scheme is studiedin a more general situation in which the SNR values of pri-mary user signal are different. In this situation, in addition to
the number of SRTS packets collected, which SRTS packetsare collected determines the performance of the cooperativespectrum sensing. Therefore in this study a new system stateis defined and used in the adaptive collection period scheme forthe unequal SNR case. The new system state includes the identi-fication of the collected SRTS packets. In this case, the optimalstopping of the collection period is also a finite-horizon deci-sion problem and backward induction is used for the solutionof the proposed scheme with the new system states. Also in thisstudy, analysis of the adaptive collection period scheme in theunequal SNR case is provided and it shows a good agreementwith the simulation results. The performance of the proposedscheme is compared with two other typical schemes. One isthe fixed collection period scheme, in which the collectionperiod length is predetermined fixedly. The other is one-SRTScooperative scheme, in which collection period is ended whenthe first SRTS packet is received and combined with the sensingdata of the collecting user to produce the final sensing decision.Numerical results show that the proposed adaptive collectionperiod scheme outperforms the other schemes.
Basically the amount of calculation in the adaptive collectionperiod scheme in the unequal SNR case is much larger thanthat of the equal SNR case. A large amount of calculationcould be an obstacle in the adoption of the adaptive collectionperiod scheme especially when the SNR values of secondaryusers change fast, the length of the maximum possible collec-tion period becomes longer or the number of secondary usersparticipating in the cooperative sensing is large. To cope withthis problem, a simple heuristic algorithm which does not usethe backward induction is proposed in this study. The timecomplexity of the backward induction scheme is O(2MK) andthe complexity of the proposed heuristic scheme is O(2MK)where K is the maximum number of the time slots of thecollection period and M is the number of secondary usersparticipating in the cooperative sensing. These time complex-ities are for the case when the revenues and actions of allthe possible states are calculated whenever the SNR values atthe secondary users change. Moreover, the time complexityof the heuristic scheme can be reduced further to O(1) if therevenues of all the states are not derived in advance at a timebut calculated when each state is visited actually. This approachis not applicable to the backward induction case, because thecalculation of the revenues of the states corresponding to thefirst slot of the collection period requires all the revenues ofthe following states. Hence the time complexity of the heuristicscheme is greatly improved while numerical results show thatthis heuristic algorithm and the backward induction schemeshow almost the same performance.
The remainder of this paper is organized as follows.Section II explains the energy detection based cooperativespectrum sensing assumed in this study. Section III gives thesystem model. Section IV explains the adaptive collectionperiod scheme with backward induction for the unequal SNRcase. Section V gives the analysis of the performance of theadaptive collection period scheme with backward induction. InSection VI, a simple heuristic algorithm is proposed for theadaptive collection period scheme. Section VII explains numer-ical results. Finally, conclusions are given in Section VIII.

LEE: ADAPTIVE RANDOM ACCESS FOR COOPERATIVE SPECTRUM SENSING IN COGNITIVE RADIO NETWORKS 833
II. ENERGY DETECTION BASED COOPERATIVE
SPECTRUM SENSING
The received signal at secondary user i in time slot n isrepresented using two hypotheses, i.e. H0, primary user signalabsent, and H1, primary user signal present, as follows:
H0 : yi(n) =ui(n), (1)
H1 : yi(n) =his(n) + ui(n). (2)
In H0, ui(n) is additive noise. In H1, s(n) is the transmittedprimary user signal and hi is the channel coefficient of sec-ondary user i. yi(n) is the addition of the received primaryuser signal at user i, his(n), and the noise ui(n). It is assumedthat ui(n) is a Gaussian, independent and identically distributed(iid) random process with mean and variance (0, σ2
u) and hi
is zero-mean, unit variance complex Gaussian random variableand they are independent. It is further assumed that the noiseis circularly symmetric complex Gaussian and the primary usersignal is modulated by complex PSK.
Energy based spectrum sensing is assumed in this study. Thesensing statistic of secondary user i is given by
Xi =1
N
N∑n=1
|yi(n)|2 . (3)
N is the number of spectrum sensing samples of each secondaryuser and obtained as N = τfs, where fs is sampling frequencyand τ is spectrum sensing time. In H0, pdf of Xi is chi-squaredistribution with 2N degrees of freedom. When N is suffi-ciently large, this distribution can be approximated as Gaussiandistribution by central-limit theorem. In H0, mean and varianceof X are θ0 = σ2
u and σ20 = 2σ4
u/N respectively. In H1, meanand variance are θ1 = (γi + 1)σ2
u and σ21 = (2γi + 1)2σ4
u/Nrespectively where γi is the received SNR of primary usersignal at secondary user i [7].
There are two types of sensing error probability. The falsealarm probability Pfa is P (deciding H1|H0 true). The miss de-tection probability Pmd is P (deciding H0|H1 true). In cognitiveradio networks, it is important that secondary user transmissionshould not incur much interference to primary user signal. Theamount of possible interference to primary user signal is typi-cally represented by miss detection probability of primary usersignal. Thus the miss detection probability should be limitedto a certain amount. For example, IEEE 802.22 designates thatspectrum sensing performance should be such that the missdetection probability is 0.1 at the SNR of primary user signalof −21 dB [8].
In this study the soft combining method is used for thecooperative sensing. There is a collecting user which collectsthe sensing statistics of the other secondary users. The decisionstatistic of the collecting user becomes
X =r∑
i=0
giXi
{≥ η → H1
< η → H0(4)
where r is the number of collected sensing statistics, gi is thenonnegative weighting factor of the sensing statistic of user i,
η is the decision threshold and X0 is the sensing statistic of thecollecting user 0.
When the SNR values of primary user signal at the secondaryusers are unequal, the derivation of the optimal weightingfactor gi is quite demanding [4]–[6]. Thus relatively simpleapproaches to the derivation of the weighting factors are usedin this study as below. When the channel gains of the secondaryusers are known, maximal ratio combining can be used. Inthis case, the false alarm probability given a specific Pmd isrepresented as [7]
Pfa = Q
⎛⎝√
N
r∑i=0
γi +Q−1(1− Pmd)
√√√√1 + 2
r∑i=0
γi
⎞⎠
(5)
where Q(.) is the complementary distribution function of thestandard Gaussian. The combined SNR of primary user signalat the collecting user becomes the summation of the SNRs ofthe secondary users with the sample number N .
When the channel gains are unknown, equal gain combiningcan be used and the false alarm probability becomes [7]
Pfa=Q
⎛⎝√
N
r+1
r∑i=0
γi+Q−1(1−Pmd)
√√√√1+2
r+1
r∑i=0
γi
⎞⎠ .
(6)
In the actual implementation of the combining methods,decision threshold η is determined for the decision statisticto satisfy the required miss detection probability. Then thethreshold is compared with the decision statistic to producea sensing decision resulting in the false alarm probability asshown in (5) and (6). As the false alarm probability is in-creased, the throughput of the secondary users is decreased.As the number of collected sensing statistics, r, is increased,the corresponding decision threshold should be updated so thatthe false alarm probability is decreased while the miss detectionprobability remains constant. When the miss detection prob-ability is decreased too, the amount of the reduction of thefalse alarm probability would be smaller, which can be deducedfrom (5) and (6). Thus the miss detection probability is set to acertain target value to maximize the reduction of the false alarmprobability.
III. SYSTEM MODEL
In this study, SRTS/CTS exchange is used for both the acqui-sition of data transmission opportunity of secondary users andcooperative spectrum sensing. Each secondary user with datato send performs spectrum sensing and then transmits SRTSpackets containing its sensing statistic to a collecting secondaryuser until the transmission succeeds or the collecting user endsthe collection of the SRTS packets. When the collecting userreceives an SRTS packet, it produces spectrum sensing decisionusing the decision statistic consisting of the sensing statisticscontained in the received SRTS packets and its own spectrumsensing statistic. When the sensing statistics collected so farare not enough to guarantee optimal performance, the collect-ing user waits for more SRTS packets from other accessing

834 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015
Fig. 1. Considered cognitive radio MAC with cooperative spectrum sensingusing the SRTS/CTS exchange.
secondary users. When the collecting user decides that suffi-cient sensing statistics are collected and no primary user signalexists, it replies with a CTS packet designating the secondaryuser to transmit data. The decision by the collecting user aboutwhich secondary user is selected to transmit data is a schedulingproblem and is not considered in detail in this study. Thesecondary user specified in the CTS packet transmits till thestart of the next spectrum sensing.
Fig. 1 shows the proposed cognitive radio MAC which con-sists of spectrum sensing period followed by combined sensingdata collection and data transmission period. The number ofsecondary users participating in the cooperative sensing is M .It is assumed that the collecting user knows the number ofsecondary users participating in the cooperative sensing andthe secondary users always have data to transmit. The spectrumsensing time is denoted by τ . The collection period has a slottedstructure and the slot length is ta. During spectrum sensing allsecondary users should stop their transmission and hence thestart time and the duration of each spectrum sensing periodshould be predetermined and notified to all the secondary users.Thus the duration of the combined sensing data collection anddata transmission period is fixed to T whose correspondingnumber of slots is K. A collection period starts at the end ofthe previous spectrum sensing. During the collection, each ac-cessing secondary user sends an SRTS packet to the collectinguser 0 by random access.
For the random access, it is assumed that each secondary usertransmits its SRTS packet in each slot with access probabilityp. This is a simple random access procedure. When no collisionoccurs during the transmission of an SRTS packet, the collect-ing user will receive the SRTS packet and broadcasts an ACKfor the SRTS packet. Then the corresponding access user wouldnot transmit its SRTS packet further in the same collectionperiod. When more than one secondary users transmit theirSRTS packets in a slot, collision occurs and the transmissionsfail. In this case, the corresponding secondary users would notreceive ACKs for their transmissions and they will try to sendtheir SRTS packets further in this collection period. In a typicalrandom access scheme, a random access procedure ends whenthe first access is successful. However, in the proposed scheme,the access procedure does not end when the first SRTS packet is
received by the collecting user but ends when the collecting userdecides that suffcient number of SRTS packets are collected.
In this system, an important problem is how to determine thestopping time of the collection period. One simple solution is toend the collection period after receiving the first SRTS packet.In this case, the cooperative spectrum sensing feature is notfully exploited. When several SRTS packets are to be collected,the length of the collection period can be fixedly determinedor adapted dynamically. The proposed scheme pursuits theadaptive determination of the collection period. In the nextsection, it is studied how to find the optimal stopping time ofthe collection period in an unequal SNR case.
IV. ADAPTIVE COLLECTION PERIOD SCHEME
In this section the method to adapt the length of each col-lection period is studied in an unequal SNR case. When thecollection period is used, it is necessary to find the optimal stop-ping time of each collection period. In the proposed scheme, thelength of a collection period is not determined at the start of thecollection period. Instead in each slot of the collection period,the collecting user decides whether to extend the current collec-tion period by one more slot to wait for another SRTS packetor stop the collection period. This decision is obtained basedon the expected revenues of possible actions in each slot whichare calculated based on the SRTS packets collected so far in thecurrent collection period. This is autally a finite-horizon deci-sion problem which can be solved by backward induction [22].
Let us assume that currently there remain k slots till the nextspectrum sensing and the collecting user has received m SRTSpackets successfully so far in the current collection period. Thecollected SRTS packets are represented by a bitmap consistingof M bits which is the number of secondary users participatingin the cooperative sensing. Each bit of a bitmap represents thecollection status of the SRTS packet of a specific secondaryuser. When an SRTS packet has been received by the collectinguser in the current collection period, the corresponding bit ofthe bitmap is set to 1 and otherwise it is set to 0. There are(Mm
)bitmap cases for m SRTS packets received. Each bitmap
case is denoted by sm,i where m represents the number ofSRTS packets collected so far, m = 1, · · · ,M and i is theindex of the bitmap representing the received SRTS packets,i = 1, · · · ,
(Mm
). Also, s0 represents the state that no SRTS
packet is received so far. The SNR values of primary user signalat the secondary users are denoted by {γj |j = 1, · · · ,M}. Astate is defined as (sm,i, k) where k represents the remainingslots till the next spectrum sensing. With the m SRTS packetsreceived, there remain M −m SRTS packets not collectedyet. The expected revenue of state (sm,i, k) is denoted byER(sm.i, k), which indicates the expected number of slots thatcan be used for data transmission till the next spectrum sensing.ER(sm,i, k, action) represents the expected revenue in state(sm,i, k) when the specified action is selected.
There are two actions possible in each slot. One is to stopcollecting the SRTS packets and start data transmission in thenext slot and the other is to extend the collection period byone slot. When the collecting secondary user decides to endthe current collection period, the k remaining slots till the next

LEE: ADAPTIVE RANDOM ACCESS FOR COOPERATIVE SPECTRUM SENSING IN COGNITIVE RADIO NETWORKS 835
Fig. 2. State transition starting from the current state (sm,i, k) when thechosen action is to extend the collection period.
spectrum sensing will be used for data transmission. The actionat the state (sm,i, k) is denoted by a(sm,i, k) and it is selectedto obtain the larger expected revenue as follows:
a(sm,i, k) =
⎧⎪⎨⎪⎩
stop(= 0) if ER(sm,i, k, stop)≥ ER(sm,i, k,extend)or m = M or k = 1
extend(= 1) o.w.
(7)
where the action value 0 means stopping the collection periodand the action value 1 means extending the collection period byone slot. When all the SRTS packets are received, i.e., m = M ,or only one slot remains, i.e., k = 1, the only possible action isstop the collection period.
The revenue ER(sm,i, k) can be rewritten as
ER(sm,i, k) = ER (sm,i, k, a(sm,i, k)) . (8)
ER(sm,i, k, a(sm,i, k)) depends on the action of the collectinguser in state ER(sm,i, k) and the expected revenues of thefollowing states in the form of (sm,i, k − 1) or (sm+1,j , k − 1).The action and expected revenue at the state ER(sm,i, k) canbe determined by backward induction starting from the possiblefinal states (sM,1, k
′), i.e., the states in which all SRTS packetsare collected, or (sr,c, 1), i.e., the states in which only one slotremains.
Fig. 2 shows the state transition diagram from the state(sm,i, k). In this state transition diagram, the leftmost staterepresents the current situation for which a proper action shouldbe found. In each slot, the collecting user considers a newstate transition diagram which starts from the leftmost staterepresenting the current SRTS packets collected and the numberof remaining slots. For each rightmost state, there exists a statetransition diagram starting from this state. This recursive chainof state transition diagram is continued until the final states arereached. From the final states, backward induction is applied.
In the final states, the expected revenue is given by
ER(sr,c, k′) = (1− Pfa,r,c)k
′P̄0 + Pmd,r,ck′P̄1 (9)
where Pfa,r,c is the false alarm probability and Pmd,r,c is themiss detection probability when the bitmap state of the receivedSRTS packets is sr,c, P̄0 is the probability that primary usersignal does not exist and P̄1 is the probability that primary usersignal exists. It is assumed that P̄0 and P̄1 can be estimated.Pmd,r,c is set to the required miss detection probability β. Notethat for the current state (sm,i, k), the possible number of col-lected SRTS packets in the future, r, ism, · · · ,min(M,m+ k).
When the collecting user ends the current collection period,the remaining k slots are used for data transmission when thesensing decision with the sensing data collected so far indicatesno primary user signal. The expected revenue is
ER(sm,i, k, stop) = k(1− Pfa,m,i)P̄0 + kβP̄1. (10)
When the collecting user decides to extend the current col-lection period by one slot, the expected revenue of this decisionis given by
ER(sm,i, k, extend) = Ps,m,i,oER(sm,i, k − 1)
+
( Mm+1)∑
D(sm,i,sm+1,j)
=1,j=1
Ps,m,i,jER(sm+1,j , k − 1) (11)
where
Ps,m,i,0 = 1−( Mm+1)∑j=1
Ps,m,i,j (12)
and j is the index of the bitmap of the collected SRTS pack-ets when one more SRTS packet is received given bitmapsm,i of the collected SRTS packets. D(sm,i, sm+1,j) is thenumber of different bits between two bitmaps sm,i andsm+1,j . D(sm,i, sm+1,j) = 1 means that sm+1,j is obtainedby adding an SRTS packet to sm,i. In other words, givencurrent bitmap sm,i, bitmap state sm+1,j is possible only whenD(sm,i, sm+1,j) = 1, and this actually corresponds to the M −m cases that one SRTS packet is received out of the M −m SRTS packets uncollected still. Ps,m,i,j is the probabilitythat an SRTS packet is received in the next slot to comprisethe bitmap sm+1,j given current bitmap sm,i. Ps,m,i,j is ob-tained as
Ps,m,i,j = p(1− p)M−m−1 (13)
where p is the probability that a secondary user transmits itsSRTS packet in a slot. Ps,m,i,0 is the probability that no SRTSpacket is received in the extended slot given current bitmapsm,i. The first term of the righthand part of (11) is due to thefailure to receive an SRTS packet successfully in the extendedslot and the second term is due to the successful receipt of anSRTS packet in the extended slot. ER(sm+1,j , k − 1) is theexpected revenue when one more SRTS packet is received toreach bitmap state sm+1,j and ER(sm,i, k − 1) is the expectedrevenue when no SRTS packet is received in the extended slotso that the bitmap state sm,i is maintained.
The operation count of the backward induction scheme isobtained below. First, calculation of the decision thresholds of

836 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015
Fig. 3. State transition entering into the current state (sm,i, k).
all the possible combinations of the collected SRTS packetsare necessary. The number of the possible combinations is2M . Once the decision thresholds and corresponding sensingerror probabilties of each bitmap case is obtained, the expectedrevenue and action are derived for each state. When K ismuch larger than M , there could exist approximately 2M statesfor each remaining slot number. Thus the maximum possiblenumber of states is about 2MK . In each state, calculation ofthe expected revenues for two possible actions and compar-ison of the revenues are required. Hence the complexity ofthe backward induction scheme is O(2MK). In the backwardinduction, the calculation of the revenue of the states in thefirst slot requires revenues of all the following states. Wheneverthe SNR values of the secondary users change, the revenuesand actions of all the states should be newly calculated and theresults are stored. Thus 2MK memory blocks containing thedecision thresholds and selected actions for all the states wouldbe required. This time complexity is not so negligible. Thus asimple heuristic algorithm is proposed.
V. ANALYSIS OF THE ADAPTIVE COLLECTION
PERIOD SCHEME
For the analysis of the adaptive collection period scheme, itis required to derive the probability that each state is visited.The probability that state (sm,i, k) is visited is denoted byP (sm,i, k). For the derivation of the state probabilities, forwardinduction starting from the initial states is used. The initialstates are such that the first slot in the collection period iselapsed. In the initial states, one SRTS packet may be receivedor not. Thus the initial states are (s0,K − 1) and (s1,i,K − 1)where i is 1, · · · ,M . The probabilities of the initial states aregiven by
P (s0,K − 1) = 1−Mp(1− p)M−1 (14)
and
P (s1,i,K − 1) = p(1− p)M−1, i = 1, · · · ,M. (15)
For states other than the initial states, the state probabilityP (sm,i, k) is obtained from its previous states. Fig. 3 shows
the state transition entering the state P (sm,i, k). When m is1, · · · ,M − 1 and k = 1, · · · ,K − 2, the state probability is
P (sm,i, k)
=P (sm,i, k+1)a(sm,i, k+1)(1−(M−m)p(1−p)M−m−1
)
+
( Mm−1)∑
D(sm−1,j ,sm,i)
=1,j=1
P (sm−1,j , k + 1)
× a(sm−1,j , k + 1)p(1− p)M−m. (16)
Note that in (16), when the selected action of the previousstate a(sm,i, k + 1) is 0, i.e., ending the collection period, thisprevious state does not contribute to the state probability. Whenm is equal to M and k = 1, · · · ,K −M , the state probabilityis obtained as
P (sM,1, k)
=M∑
D(sM−1,j ,sM,1)
=1,j=1
P (sM−1,j , k + 1)a(sM−1,j , k + 1)p.
(17)
When no SRTS packet is collected, the state probability is
P (s0, k) =(1−Mp(1− p)M−1
)K−k, k = 1, · · · ,K − 1.
(18)
The summation of the probabilities of the states in which thecollection period is ended becomes 1 as follows:
M∑m=0
(Mm)∑i=1
K−1∑k=1
P (sm,i, k) (1− a(sm,i, k)) = 1. (19)
Some performance metrics can be derived using the stateprobabilities. The average collection period length Tc is
Tc =
M∑m=0
(Mm)∑i=1
K−1∑k=1
(K − k)P (sm,i, k) (1− a(sm,i, k)) . (20)
The average number of the SRTS packets collected in a collec-tion period is given by
Na =M∑
m=1
(Mm)∑i=1
K−1∑k=1
mP (sm,i, k) (1− a(sm,i, k)) . (21)
The normalized net throughput is defined as
R =Tdta
τ +Kta(22)
where Td is the average number of the slots used for datatransmission incorporating the effect of the sensing error prob-abilities for derviation of the net throughput and becomes
Td =M∑
m=0
(Mm)∑i=1
K−1∑k=1
kP (sm,i, k) (1− a(sm,i, k))
·((1− Pfa,m,i)P̄0 + Pmd,m,iP̄1
). (23)

LEE: ADAPTIVE RANDOM ACCESS FOR COOPERATIVE SPECTRUM SENSING IN COGNITIVE RADIO NETWORKS 837
The average false alarm probability is obtained as
Pfa =M∑
m=1
(Mm)∑i=1
K−1∑k=1
P (sm,i, k) (1− a(sm,i, k))Pfa,m,i.
(24)
VI. HEURISTIC ALGORITHM
The proposed adaptive collection period scheme requiresthe backward induction from the final states. In the backwardinduction scheme, whenever the SNR values of the secondaryusers change, the expected revenues and optimal actions of allthe states should be calculated in advance and saved in memoryto be used when a corresponding state is visited. Hence therequired amount of the calculation of the backward inductionscheme could be quite demanding when the collection periodlength or the number of secondary users is large. And the back-ward induction scheme might be impractical when secondaryusers move continually or the SNR values of the secondaryusers change frequently. Thus a simple heuristic algorithm isproposed here.
In the adaptive collection period scheme, the expected rev-enue of stopping the collection period does not require thebackward induction as shown in (10). Thus only the calculationof the expected revenue of extending the collection period isconsidered in the heuristic algorithm. In the backward induc-tion scheme, the expected revenue of extending the collectionperiod is shown in (11). In the heuristic algorithm, the ex-pected revenues of the next possible states ER(sm,i, k − 1)and ER(sm+1,j , k − 1) in (11) are approximated by assumingthat the collection period is stopped without condition afterthe extended slot. This assumption eliminates the backwardinduction. Thus the expected revenues of the next possiblestates are approximated as
ER(sm,i, k − 1) ≈ (k − 1)((1− Pfa,m,i)P̄0 + Pmd,m,iP̄1
)(25)
and
ER(sm+1,j , k − 1)
≈ (k − 1)((1− Pfa,m+1,i)P̄0+Pmd,m+1,iP̄1
).
(26)
Eventually in the heuristic algorithm the expected revenue ofextending the collection period is obtained by applying theabove two revenue expressions to (11).
The heuristic algorithm does not use the backward inductionstarting from the final states. Thus the calculation burden due tothe backward induction vanishes. In the worst case, the chosenaction at each slot is the extend until the end of the collectionperiod and the number of the states considered in this case isK. Thus the complexity of the heuristic algorithm is O(2MK).In contrast to the complexity of O(2MK) of the backwardinduction algorithm, the complexity of the heuristic algorithm isgreatly reduced. Note that this time complexity of the heuristicalgorithm is obtained under the assumption that the revenues ofall the possible states are obtained whenever the SNR values atthe secondary users change and the results are stored in memory
and retrieved when necessary. This assumption is the same asin the backward induction scheme. However, in the heuristicalgorithm, this assumption can be dropped and the revenuesof a state can be derived when the state is actually visited incollecting the SRTS packets. In this case, the time complexityis O(1) which is possible because the heuristic algorithm onlyconsiders the currently collected SRTS packets and not thefuture possible collection of SRTS packets as in the backwardinduction scheme. Thus in the heuristic scheme, the calculationburden can be neglected whereas this is not the case in thebackward induction scheme.
VII. NUMERICAL RESULTS
Parameter values used in the numerical results were as fol-lows. The required Pmd, β, was set to 0.1. The decision thresh-olds of the spectrum sensing schemes were found to satisfy therequired Pmd. The default number of access secondary users,M , was 5, and the SNR values of primary user signal at the sec-ondary users were −22 dB, −20 dB, −18 dB, −16 dB, −14 dB,respectively. The default combining scheme of the collectinguser was the maximal ratio combining. The sampling frequencyfs were 6 MHz. The noise spectral density was −174 dBm/Hz.The assumed SRTS packet transmission rate was 1 Mbps.The SRTS packet size was set to 24 bytes consisting of 20 byteof typical RTS packet and 4 byte for the sensing data [19], [20].The slot length ta was set to 0.25 ms according to the SRTSpacket size and the 1 Mbps transmission rate. The SRTS packettransmission probability of each secondary user, p, in each slotwas set to 1/M . The default T was set to 30 ms.
The proposed adaptive collection period schemes using thebackward induction and the heuristic approach respectively arecompared with cooperative sensing scheme with fixed collec-tion period and one-SRTS cooperative sensing scheme. In theone-SRTS cooperative sensing scheme, the collecting user usesits own sensing data and the one more sensing data receivedvia an SRTS packet. This is similar to HC-MAC [16] in whichonly the secondary user which exchanged the C-RTS/C-CTSmessages sends an SRTS message. In the fixed collection periodscheme, the collection period is predetermined according to theexpected number of SRTS packets collected during the collec-tion period and the required sensing performance. When thefixed collection period expires, then no more SRTS packets arereceived and data transmission starts. Optimal fixed collectionperiod is obtained as in [20].
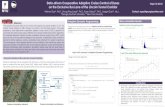
Figs. 4 and 5 show the numerical results when M is 5 ms,T is 30 ms and the maximal ratio combining is used. Theprobability that primary user signal does not exist, P̄0 is set to 1.The simulation results of the adaptive collection period schemewith backward induction show a good agreement with theanalysis results. The performance of the heuristic scheme isalmost equal to that of the optimal backward induction scheme.The backward induction scheme and the heuristic schemeshow better throughput performances than the other schemesas shown in Fig. 4. The one-SRTS scheme shows the worstthroughput when the sensing time is short, but as the sensingtime increases, the throughput becomes better than the fixedperiod scheme. As the sensing time increases, the need to

838 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015
Fig. 4. R versus τ when M is 5, T is 30 ms, P̄0 is 1, and maximal ratiocombining is used.
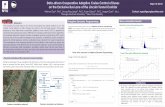
Fig. 5. Pfa versus τ when M is 5, T is 30 ms, P̄0 is 1, and maximal ratiocombining is used.
collect more SRTS packets reduces. Thus the fixed collectionperiod length could be wasteful and the throughput of the fixedperiod scheme becomes worse relatively. When several SRTSpackets are collected, the sensing error becomes low enough.In this situation, the increase of the sensing time does not havemuch effect on the sensing error and the throughput becomesdeteriorated due to the increased sensing time. Hence thereexists optimal sensing time for each sensing scheme.
When the sensing time is short, it is effective to collectmore sensing data because otherwise the false alarm proba-bility would be large. Fig. 5 shows that as the sensing timeincreases, the performance improvement by additional sensingdata is reduced. This effect is more noticeable in the multi-SRTS schemes. Thus optimal sensing times of the multi-SRTSschemes are smaller than the one-SRTS scheme.
Although the proposed adaptive period schemes show thebest performance, the average collection period lengths and thenumbers of the collected SRTS packets of the adaptive period
Fig. 6. Tc versus τ when M is 5, T is 30 ms, P̄0 is 1, and maximal ratiocombining is used.
Fig. 7. Na versus τ when M is 5, T is 30 ms, P̄0 is 1, and maximal ratiocombining is used.
schemes are not the largest as shown in Figs. 6 and 7. It isbecause the collection period does not have to be extended inthe adaptive period schemes when the SRTS packets of theusers with high SNR are collected. When the collection periodlength is small, more slots can be used for data transmission bysecondary users and this results in higher throughput. This isthe main advantage of the adaptive period schemes.
Fig. 8 shows that the throughput of the equal gain combiningis worse than the maximal ratio combining. The sensing errorof the equal gain combining is higher than the maximal ratiocombining. This effect is more noticeable when the sensingtime is short. Anyway we can see that the proposed schemesshow the best performance in this situation too.
Fig. 9 shows the throughput when the number of accessingsecondary users is increased from 1 through 10. The spectrumsensing time is 1.5 ms and T is 30 ms and P̄0 is 1. The SNRvalues of the secondary users are −22 dB, −20 dB, −18 dB,−16 dB, −14 dB, −22 dB, −20 dB, −18 dB, −16 dB and−14 dB in the order of the addtion of a user. For the one-SRTS

LEE: ADAPTIVE RANDOM ACCESS FOR COOPERATIVE SPECTRUM SENSING IN COGNITIVE RADIO NETWORKS 839
Fig. 8. R versus τ when M is 5, T is 30 ms, P̄0 is 1, and equal gain combiningis used.
Fig. 9. R versus M when τ is 1.5 ms, T is 30 ms, P̄0 is 1, and maximal ratiocombining is used.
scheme, when the sixth user with −22 dB SNR is added,the throughput performance becomes worse than those of thesmaller numbers of users. It is because the SNR of the sixthuser is lower than the SNR values of the other users. As moreusers participate in the access, the access success probability ofeach user decreases. Low SNR users such as the sixth user donot contribute much to the sensing performance when its SRTSpacket is received by the collecting user while disturbing theaccess of other users’ SRTS packets. This negative effect of lowSNR users could be a problem in the access-based cooperativesensing. Thus it would be beneficial if users with low SNRare excluded in the access for cooperative sensing. Althoughthis idea is not studied more in this study, which user shouldbe excluded could be an interesting problem for further study.Also note that the adverse effect of the low SNR user is lessnoticeable in the multi-SRTS schemes because in the multi-SRTS schemes, low SNR of a user is compensated by higherSNR of other users.
Fig. 10 shows the throughput when the probability thatprimary user signal does not exist, P̄0, is increased from 0 to 1.
Fig. 10. R versus P̄0 when M is 5, τ is 1.5 ms, T is 30 ms and maximal ratiocombining is used.
Fig. 11. R versus T when M is 5, τ is 1.5 ms, P̄0 is 1, and maximal ratiocombining is used.
The proposed adaptive period schemes show best performancefor all the P̄0 values. As shown in (10), when primary usersignal exists, secondary users transmit with the probability ofβ, i.e., the required Pmd which is set to 0.1 in this study. Whenprimary user signal does not exist, secondary users transmitwith the probability of 1− Pfa which is generally larger thanβ. Thus, as P̄0 increases, the throughput of secondary usersincreases, too.
Fig. 11 shows the throughput when the combined collectionand data transmission period, T , is changed. The adaptivecollection period scheme shows the best performance for allthe values of T . As T increases, the portion of the sensingtime and collection period decreases compared with the datatransmission time and hence the throughput increases.
VIII. CONCLUSION
In this paper, a cooperative spectrum sensing scheme com-bined with random access has been proposed for a cognitive

840 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 14, NO. 2, FEBRUARY 2015
radio MAC. Although cooperative sensing improves the spec-trum sensing performance considerably, it has a burden of howto collect the sensing data. The proposed scheme solves thisproblem by using simple random access during a collectionperiod and enhances the performance by adapting the collectionperiod length. In the proposed scheme the collection periodlength is adapted by the currently collected SRTS packetscontaining the sensing data of secondary users. Optimal adap-tation of the collection period length is possible by backwardinduction but this requires a heavy calculation burden. Thus asimple heuristic algorithm is also proposed to yield the perfor-mance quite similar to the optimal adaptation with much lessprocessing burden. The proposed methods are simple to adoptin a typical random access network with additional cognitiveradio functionality. This random access feature could facilitatethe employment of the proposed scheme in ad-hoc networkseasily.
For future works, it would be necessary to study the per-formance of the proposed methods more thoroughly in a cog-nitive radio ad-hoc environment. Also, more refinement ofthe proposed scheme would be possible, e.g. excluding lowSNR secondary users from the cooperative sensing or assigningdifferent access probabilities to secondary users depending onthe SNR values. These refinements might improve the sensingperformance but they could raise a fairness problem betweensecondary users. Thus more thorough studies on this issuewould be necessary. Although energy-based spectrum sensingmethod and associated cooperative combining method are as-sumed in this study, the main point of this study lies in theadaptive collection period not in a specific spectrum sensingscheme. Thus the underlying cooperative sensing might useanother sensing scheme. For example, the SPRT could be usedwith the proposed adaptive collection scheme. The detailedchange in the collection scheme using other cooperative sensingmethods could be another research topic.
REFERENCES
[1] S. Haykin, “Cognitive radio: Brain-empowered wireless communica-tions,” IEEE J. Sel. Areas Commun., vol. 23, no. 2, pp. 201–220,Feb. 2005.
[2] W. Zhang, R. K. Mallik, and K. B. Letaief, “Optimization of cooperativespectrum sensing with energy detection in cognitive radio networks,”IEEE Trans. Wireless Commun., vol. 8, no. 12, pp. 5761–5766, Dec. 2009.
[3] J. Ma, G. Zhao, and Y. Li, “Soft combination and detection for cooperativespectrum sensing in cognitive radio networks,” IEEE Trans. WirelessCommun., vol. 7, no. 11, pp. 4502–4507, Nov. 2008.
[4] Z. Quan, S. Cui, and A. H. Sayed, “Optimal linear cooperation for spec-trum sensing in cognitive radio networks,” IEEE J. Sel. Topics SignalProcess., vol. 2, no. 1, pp. 28–40, Feb. 2008.
[5] Z. Quan, W.-K. Ma, S. Cui, and A. H. Sayed, “Optimal linear fusion fordistributed detection via semidefinite programming,” IEEE Trans. SignalProcess., vol. 58, no. 4, pp. 2431–2436, Apr. 2010.
[6] G. Taricco, “Optimization of linear cooperative spectrum sensing forcognitive radio networks,” IEEE J. Sel. Topics Signal Process., vol. 5,no. 1, pp. 77–86, Feb. 2011.
[7] Y.-C. Liang, Y. Zong, E. C. Y. Peh, and A. T. Hoang, “Sensing-throughputtradeoff for cognitive radio networks,” IEEE Trans. Wireless Commun.,vol. 7, no. 4, pp. 1326–1337, Apr. 2008.
[8] IEEE 802.22 Standard for Wireless Regional Area Networks Part 22:Cognitive Wireless RAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications: Policies and Procedures for Operation in theTV Bands, Jul. 2011.
[9] J. Shen, T. Jiang, S. Liu, and Z. Zhang, “Maximum channel throughput viacooperative spectrum sensing in cognitive radio networks,” IEEE Trans.Wireless Commun., vol. 8, no. 10, pp. 5166–5175, Oct. 2009.
[10] N. Kundargi and A. Tewfik, “Hierarchical sequential detection in thecontext of dynamic spectrum acess for cognitive radios,” in Proc. IEEEICECS, 2007, pp. 514–517.
[11] Y. Shei and Y. T. Su, “A Sequential test based cooperative spec-trum sensing scheme for cognitive radios,” in Proc. IEEE PIMRC, 2008,pp. 1–5.
[12] S.-J. Kim and G. B. Giannakis, “Sequential and cooperative sensing formulti-channel cognitive radios,” IEEE Trans. Signal Process., vol. 58,no. 8, pp. 4329–4253, Aug. 2010.
[13] L. Hesham, A. Sultan, M. Nafie, and F. Gidham, “Cooperative sensingwith sequential ordered transmissions to secondary fusion center,” inProc. IEEE ICASSP, 2011, pp. 2988–2991.
[14] Q. Zou, S. Zheng, and A. H. Sayed, “Cooperative sensing via sequentialdetection,” IEEE Trans. Signal Process., vol. 58, no. 12, pp. 6266–6283,Dec. 2010.
[15] Q. Zhao, L. Tong, A. Swami, and Y. Chen, “Decentralized cognitiveMAC for opportunistic spectrum access in Ad Hoc networks: A POMDPframework,” IEEE J. Sel. Areas Commun., vol. 25, no. 3, pp. 589–600,Apr. 2007.
[16] J. Jia, Q. Zhang, and X. Shen, “HC-MAC: A hardware-constrained cogni-tive MAC for efficient spectrum management,” IEEE J. Sel. Areas Com-mun., vol. 26, no. 1, pp. 106–117, Jan. 2008.
[17] H. Su and X. Zhang, “Cross-layer based opoportunistic MAC protocolsfor QoS provisionings over cognitive radio wireless network,” IEEE J.Sel. Areas Commun., vol. 26, no. 1, pp. 118–129, Jan. 2008.
[18] D.-J. Lee and H. Wu, “Spectrum sensing time minimizing the access delayof IEEE 802.11-like MAC in cognitive radio networks,” IEEE Commun.Lett., vol. 15, no. 11, pp. 1249–1251, Nov. 2011.
[19] M. Gast, 802.11 Wireless Networks: The Definitive Guide. Sebastopol,CA, USA: O’Reilly Media, 2005.
[20] D.-J. Lee and M. S. Jang, “Optimal access period for cooperative spec-trum sensing in cognitive radio networks,” in Proc. IEEE ICWITS, 2010,pp. 1–4.
[21] D.-J. Lee, “Adaptive cooperative spectrum sensing using random access incognitive radio networks,” in Proc. IEEE PIMRC, 2013, pp. 1835–1839.
[22] M. L. Puterman, Markov Decision Process: Discrete Stochastic DynamicProgrammin. Hoboken, NJ, USA: Wiley-Interscience, 2005.
[23] Y. S. Chow, Great Expectations: The Theory of Optimal Stopping.Boston, MA, USA: Houghton Mifflin, 1971.
Dong-Jun Lee (M’05) received the Ph.D. degreein electrical engineering from the Korea AdvancedInstitute of Science and Technology (KAIST),Daejon, Korea, in 2000. From 2000 to 2005, heworked for Samsung Electronics, Co., Ltd, Korea.Since 2005, he has been with Korea Aerospace Uni-versity, Goyang, Korea, where he is currently anAssociate Professor. His research interests includeresource management in wireless network, cognitiveradio networks, sensor networks, and Internet datamanagement.