Ecological Cooperative Adaptive Cruise Control for ...
106
Ecological Cooperative Adaptive Cruise Control for Autonomous Electric Vehicles BY LORENZO BERTONI Politecnico di Torino, Turin, Italy, 2016 THESIS Submitted as partial fulfillment of the requirements for the degree of Mechanical Engineering in the Graduate College of the University of Illinois at Chicago, 2017 Chicago, Illinois Defense Committee: Sabri Cetinkunt, Chair and Advisor Arunkumar Subramanian Marco Masoero, Politecnico di Torino
Transcript of Ecological Cooperative Adaptive Cruise Control for ...

Ecological Cooperative Adaptive Cruise Control for Autonomous Electric
Vehicles
BY
LORENZO BERTONIPolitecnico di Torino, Turin, Italy, 2016
THESIS
Submitted as partial fulfillment of the requirementsfor the degree of Mechanical Engineering
in the Graduate College of theUniversity of Illinois at Chicago, 2017
Chicago, Illinois
Defense Committee:
Sabri Cetinkunt, Chair and Advisor
Arunkumar Subramanian
Marco Masoero, Politecnico di Torino

ACKNOWLEDGMENTS
Firstly, I express my gratitude to Jacopo Guanetti. This work would not have been possible
without his guidance, support and patience. I am also very grateful to Francesco Borrelli for
welcoming me in his lab and for his precious advices.
Furthermore, I would like to thanks my advisors Sabri Cetinkunt and Marco Masoero for
their cooperation and for providing me the possibility to conduct my research at the University
of California, Berkeley.
Another thanks goes to my colleagues in the Model Predictive Laboratory for being very
helpful. A special thanks goes to Valerio Turri, from KTH, for his valuable inputs.
I am very grateful to my parents for all the support the always gave me, that means a lot
for me.
Last but certainly not least, thank you, Maria.
LB
ii

TABLE OF CONTENTS
CHAPTER PAGE
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 BACKGROUND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1 Ecological Cooperative Adaptive Cruise Control . . . . . . . . 42.2 Electric Vehicles . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Concept of Platooning . . . . . . . . . . . . . . . . . . . . . . . . 62.3.1 Spontaneous Platooning . . . . . . . . . . . . . . . . . . . . . . . 72.4 Hierarchical Control System . . . . . . . . . . . . . . . . . . . . 72.5 Vehicle to Vehicle Communication . . . . . . . . . . . . . . . . . 8
3 OPTIMAL CONTROL THEORY . . . . . . . . . . . . . . . . . . . . . 103.1 Optimization Problem . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Dynamic Programming . . . . . . . . . . . . . . . . . . . . . . . 123.3 Model Predictive Control . . . . . . . . . . . . . . . . . . . . . . 163.3.1 Advantages and Limits . . . . . . . . . . . . . . . . . . . . . . . 18
4 PROBLEM STATEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . 204.1 Non-linear Vehicle Dynamics . . . . . . . . . . . . . . . . . . . . 204.2 Powertrain Model . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 OFFLINE OPTIMIZATION . . . . . . . . . . . . . . . . . . . . . . . . . 375.1 Pontryagin Minimum Principle . . . . . . . . . . . . . . . . . . . 385.2 Analytical Solution . . . . . . . . . . . . . . . . . . . . . . . . . . 405.2.1 Control Law Derivation . . . . . . . . . . . . . . . . . . . . . . . 435.2.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.3 Dynamic Programming . . . . . . . . . . . . . . . . . . . . . . . 525.4 Numerical Optimization: YALMIP Toolbox . . . . . . . . . . . 57
6 ONLINE OPTIMIZATION . . . . . . . . . . . . . . . . . . . . . . . . . . 596.1 Optimal Control Problem . . . . . . . . . . . . . . . . . . . . . . 596.2 Suboptimality of the Solution . . . . . . . . . . . . . . . . . . . 606.3 Penalization of the Terminal Kinetic Energy . . . . . . . . . . 626.4 Penalization of the Terminal Distance . . . . . . . . . . . . . . 646.5 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7 CLOSED LOOP SIMULATIONS WITH EXPERIMENTAL FORE-CAST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
iii

TABLE OF CONTENTS (continued)
CHAPTER PAGE
7.1 QuasiStatic Simulation Toolbox . . . . . . . . . . . . . . . . . . 697.1.1 QSS Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 707.1.2 QSS Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 717.2 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . 727.2.1 Forecast Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727.2.2 Energy Savings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.2.3 MPC Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.3 Scenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757.3.1 Highway Scenario 1 . . . . . . . . . . . . . . . . . . . . . . . . . 757.3.1.1 Model Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.3.1.2 Energy Savings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 787.3.2 Highway Scenario 2 . . . . . . . . . . . . . . . . . . . . . . . . . 807.3.3 Urban Scenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8 EMBEDDED IMPLEMENTATION . . . . . . . . . . . . . . . . . . . 848.1 Time Constraint . . . . . . . . . . . . . . . . . . . . . . . . . . . 848.2 FORCES Pro Code Generator . . . . . . . . . . . . . . . . . . . 868.3 Hardware in the Loop Simulation . . . . . . . . . . . . . . . . . 90
9 CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
CITED LITERATURE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
VITA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
iv

LIST OF TABLES
TABLE PAGEI VEHICLE AND ENVIRONMENTAL PARAMETERS . . . . . . . . . . . 28II MPC PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
v

LIST OF FIGURES
FIGURE PAGE1 Linear approximation and regression curve of experimental data (1) . . . . 262 Powertrain scheme in an electric vehicle . . . . . . . . . . . . . . . . . . . . 293 Nominal torque for an electric motor of 12 kW . . . . . . . . . . . . . . . . 304 Powertrain model of an electric motor: experimental data (blue dots) and
fitting surface Pm(t) = b1Tm(t)ω(t) + b2T2m(t). . . . . . . . . . . . . . . . . 34
5 Analytical optimal motor torque in its six different phases . . . . . . . . . 516 Analytical optimal speed (first plot) and position (second plot) profiles . . 527 Torque comparison using analytical solution and dynamic programming
approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 548 Optimal speed (first plot) and position (second plot)+ of the ego vehicle
using analytical solution and dynamic programming approach . . . . . . . 559 Relative speed between the ego and the target vehicle with and without
penalization of the kinetic energy . . . . . . . . . . . . . . . . . . . . . . . . 6310 Relative speed (first plot) and distance (second plot) between the ego and
the target vehicle with and without the terminal costs . . . . . . . . . . . . 6811 QSS outline and elements not included in the model adopted in the Eco-
CACC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7012 Experimental speed profile collected driving in the Highway 101 around
the Silicon Valley . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7213 Extract of speed profile of target and ego vehicles (first plot) and their
relative distance (second plot) of “Highway Scenario 1” . . . . . . . . . . . 7614 Speed profile of target and ego vehicles (first plot) and their relative dis-
tance (second plot) of “Highway Scenario 1” . . . . . . . . . . . . . . . . . . 7715 Comparison between the controller optimal torque and the QSS validation
using the same speed profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7816 Energy consumption comparison using the Eco-CACC and a traditional
ACC resulting in energy saving of 15.6 % . . . . . . . . . . . . . . . . . . . 7917 Speed profile of target and ego vehicles (first plot) and their relative dis-
tance (second plot) in “Highway Scenario 2” . . . . . . . . . . . . . . . . . . 8018 Speed profile of target ego vehicles (first plot) and their relative distance
(second plot) in an urban scenario . . . . . . . . . . . . . . . . . . . . . . . . 8219 Computational time in Matlab environment of ”Highway Scenario 2” with
N=10s, Ts=0.1s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8620 Optimal torque, speed and relative distance of the ego vehicle in ”Highway
Scenario 3” are shown in the first second and last plot respectively . . . . 8721 Computational time comparison between IPOPT and FORCES solvers. . 8922 Computational time during a Hardware in the Loop simulation with Ts=0.1
s and N=8 s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
vi

LIST OF ABBREVIATIONS
ACC Adaptive Cruise Control
CACC Cooperative Adaptive Cruise Control
CN Cellular Network
DP Dynamic Programming
DSRC Dedicated Short Range Communications
Eco-CACC Ecological Cooperative Adaptive Cruise Control
GPS Global Positioning System
HIL Hardware In the Loop
ITS Intelligent Transportation System
MPC Model Predictive Control
PMP Pontryagin Minimum Principle
QSS TB QuasiStatic Toolbox
V2I Vehicle to Infrastructure
V2V Vehicle to Vehicle
VANET Vehicle Ad hoc NETwork
vii

SUMMARY
This thesis develops an ecological cooperative adaptive cruise control, which exploits look-
ahead information coming from a preceding vehicle in order to minimize energy consumption.
The controller enables substantial fuel savings, combining an optimal eco-driving and an adap-
tive cruise control that exploits the reduction of aerodynamic resistance. The proposed control
approach is tailored for electric vehicles as it leverages a realistic powertrain model, validated
with experiments in the literature. Different optimization techniques are analyzed and com-
pared to solve the optimal control problem offline. For real-time implementation, a nonlinear
model predictive control framework is proposed. Look-ahead information is simulated using
experimental data collected driving in the Silicon Valley around the city of San Francisco. Sim-
ulations in real-world driving conditions suggest substantial energy savings when the proposed
Eco-CACC is compared to a standard adaptive cruise controller. Finally, hardware-in the-loop
tests have been conducted to show the effectiveness of the approach for vehicle implementations.
viii

CHAPTER 1
INTRODUCTION
In the European Union, the transportation sector is still responsible for 23.2% of the green-
house gas emissions. A substantial increase of 9% of share from 1990 well represents the
increasing importance of the this sector in the world economy [2]. The situation in the rest of
the world is even worse: in ten years (from 2000 to 2010) China doubled C02 emissions due
to the transportation sector and a further increase is expected. Furthermore, car accidents
lead to more than 120 000 victims every year in the EU and almost 1.3 million victims in the
world [3]. Thanks to the incessant progression of technology, in particular on Electronic Con-
trol Units (ECU), vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication
and vehicle sensors, the concept of driving is rapidly changing. Cars are becoming more and
more autonomous every year, with a consequent decrease of emissions. In addition, they are
equipped with complex safety systems that permits a strong decrease of the mortality rate in
the transportation sector.
In this thesis we focus on electric vehicles, which are responsible for global warming emissions
through the electricity supply chain of the charging stations. Furthermore, energy savings are
even more important for this category, since the battery capacity appears to be their main
limitation.
There exists at least two effective ways to reduce energy consumption of vehicles. The first
one is the eco-driving concept. There are various ways of driving the same journey from an
1

2
energy point of view. Several studies already investigated how to optimize the speed trajectory
of a vehicle in order to minimize the energy consumption (e.g. [4], [5], [6]). The other one is
the platooning concept, which defines a group of vehicles traveling at a close inter-vehicular
distance. The main advantage of a platoon formation is the reduction of the overall aerodynamic
drag, which implies a reduction of fuel consumption. Starting from the sixties, many studies
have investigated this concept (e.g. [7]). However, the energy consumption aspect of platooning
has been analyzed in the literature especially regarding heavy-duty vehicles ([8] and [9]). The
reason is that freight transportation often requires more vehicles to travel the same journey at
the same time. Alternatively, departure and arrival time of heavy-duty vehicles can be flexible,
making easy to arrange a common route for the convoy.
The thesis proposes a different approach of platooning, suitable for passenger cars, and it
focuses on optimal eco-driving control in order to maximize energy savings. The ego vehicle
during its journey receives trajectory information from other cars around it. If it finds a vehicle
close enough with a common route (target vehicle), it may decide to reach the other car and to
travel behind it at a close inter vehicular distance until the end of the common route. In any
case, no surrounding vehicle will modify its trajectory, it will just continue its journey. For this
fact, we refer to the term“spontaneous” platoon formation.
This thesis is part of a work in which a two-layer hierarchical control architecture is proposed.
The high level decides whether or not joining a target vehicle in a platoon formation. In the
current work this decision has already been taken and the focus is on the low-level powertrain
controller.

3
An ecological cooperative adaptive cruise control (Eco-CACC) is therefore presented. The
controller relays on vehicle-to-vehicle communication (V2V) receiving real-time information
and forecast of the future states of the target vehicle. Adopting a predictive control strategy, it
generates the energy-optimal speed profile independently from the preceding vehicle trajectory.
The effectiveness of the controller lies in combining an eco-driving approach with the aerody-
namic reductions typical of platoon formations. A nonlinear model predictive controller has
been chosen due to its capacity of handle input and state constraints. The latter has been used
for safety purposes, guaranteeing collision avoidance between vehicles.
The thesis is organized as follows. In chapter 2 a background of autonomous vehicle tech-
nologies is provided. In chapter 3 the main concepts of the optimal control theory are recalled.
In chapter 4 vehicle and powertrain model for an electric car are defined. In chapter 5 various
choices for the optimization procedure are analyzed and compared. In chapter 6 the optimal
control formulation is illustrated. Then, in chapter 7 simulations are performed using experi-
mental data. Finally, in chapter 8 real-time solutions are revisited to prove whether it is fast
enough for vehicle implementations. A conclusion provides final remarks.

CHAPTER 2
BACKGROUND
2.1 Ecological Cooperative Adaptive Cruise Control
The aim of this work is to develop a real-time ecological cooperative adaptive cruise control
(Eco-CACC) for electric vehicles, which leads to significant energy savings with respect to a
traditional adaptive cruise control (ACC).
ACC is a technology fully developed and implemented in the new vehicles currently on the
market. During navigation, it automatically adjusts the speed in order to maintain a fixed
distance from the preceding vehicle. It is a more advanced form of control with respect to the
traditional cruise control (CC) which simply maintains the vehicle at a fixed speed.
Cooperative adaptive cruise control (CACC) is the last extension in the automation of
navigation. It receives real-time information from the vehicle ahead to perform the optimal
speed profile. It takes into account also the behavior of the other vehicles and the conditions
of the traffic. For example, the vehicle ahead can provide some information regarding a traffic
jam to the following vehicle which starts to slow down sooner thanks to this information.
The main objective of the Eco-CACC developed in this report is to use the real-time infor-
mation available from the preceding vehicle in order to save as much energy as possible over
the journey. The ego vehicle receives from the target vehicle (in front of it) its actual speed
profile and a forecast of the next seconds. The Eco-CACC uses that information to create an
4

5
optimal speed profile (for the ego vehicle). The length of the horizon of the forecast received
from the target vehicle is extremely variable and it affects the performances of the Eco-CACC.
The longer the horizon of the forecast available (realistically no more than 10-12 seconds), the
better the performances of the Eco-CACC. The trajectory obtained from the controller is the
solution of an optimization problem that minimizes fuel consumption within the horizon. In
order to accomplish that, a powertrain model of the vehicle has been considered. In this work,
the focus is on electric vehicles. Therefore, the electrochemical energy drained from the battery
to the electric motor has to be minimized.
2.2 Electric Vehicles
This thesis focuses on electric vehicles. They still represent a small share on the market,
but they are characterized by a sharp growth. In 2015, plug-in electric vehicles sales increased
of 80% with respect to the previous year, according with the trend of the past years [10].
This kind of vehicles has always been attractive for the absence of greenhouse gas emissions
and for the lack of dependence from oil. Nowadays, the escalation of renewable energy makes
this technology even more attractive. If the electric energy used in an electric vehicle is produced
by a power plant that burns oil or gas, this technology is still responsible for emissions: the
ones produced by the power plant in order to provide to the vehicle its energy. Instead, if
the electric energy is directly produced by a renewable energy source, the electric car can be
considered effectively a zero-emission technology.
Electric vehicles make use of the energy that comes from an external source. This energy is
stored in an electrochemical accumulator. The battery provides currents and constant tension

6
to an inverter that transforms direct current (DC) into alternating current (AC) and it fuels
an electric motor. Generally, the most used electric motors are asynchronous motor (induction
motor) or permanent magnet machines. One peculiar aspect of the electric vehicles is their
regenerative braking. It is possible to slow down the vehicle by converting the kinetic energy
into a form that can be stored into the battery. Therefore, the energy that would be wasted
into heat during a normal braking can be partially recovered.
2.3 Concept of Platooning
Platoon is the term for a group of vehicles coupled that travels at close inter-vehicular
distances in order to save energy. Platoon concept is mainly studied and applied to heavy-duty
vehicles which are electronic coupled. They usually accelerate and brake simultaneously in
order to save energy but also to reduce congestions of the roads.
Vehicles that travels at a close inter-vehicular distance experience a decreasing in the fuel
consumption. In fact, when a vehicle is traveling few meters behind another one, the resistance
force caused by the air on the vehicle behind is reduced up to the 50%. The reduced pressure
of the air creates the phenomenon called slipstream effect, extensively used in every car or bike
competition. The dependence between the distance of the two vehicles and the reduction of the
drag coefficients is not linear and it is function of various factors such as the frontal area of the
vehicles and its speed.
The contribution of the air resistance for the fuel consumption is anything but negligible,
especially at high speeds, and the main idea behind the platooning concept is to take advantage
of this aspect.

7
2.3.1 Spontaneous Platooning
Platooning concept, until now, has been extensively adopted for vehicles which do an entire
journey together, mainly for freight transportation. But, thanks to the spread of communication
technologies, is now interesting to study a more spontaneous way of creating platoons.
The ego vehicle, during his journey, can receives information of the trajectory from other
cars around it. If it finds a vehicle close enough with a common route (target vehicle), it can
decide to reach this other car and to travel behind him at a close inter-vehicular distance until
the end of the common route. Spontaneous approach means that the target vehicle ahead not
need to adapt its trajectory or to receive information from the ego vehicle. It will just continue
its journey, while the ego vehicle will take advantage of the air drag reduction.
2.4 Hierarchical Control System
The ecological driving proposed is characterized by two different phases. During the first one,
the ego vehicle receives information from all the vehicles around it and decides if it is convenient
for it to reach another vehicle and follow this vehicle at a close inter-vehicular distance. The
second phase starts when the other vehicle is reached. The Eco-CACC should guarantee in real
time that the best trajectory is performed. In fact, the behavior of the target vehicle can be
non-optimal in terms of fuel consumption and it is not efficient just following it at a close inter-
vehicular distance. Instead, the Eco-CACC receives information regarding the speed profile of
the target vehicle and calculate the optimal speed of the ego vehicle accordingly. These two
phases result in a control system articulated in two different layers, that is called hierarchical
control system. The higher layer takes into account the spontaneous platoon formation, i.e.

8
the decision to join another vehicle and to follow it at a close distance. The lower level (the
Eco-CACC) controls the longitudinal dynamics of the vehicle (powertrain control) in order to
perform the best speed profile in terms of energy savings.
This thesis consists in the development of the lower layer, the powertrain control of the
vehicle. The decision of joining another vehicle in order to form a spontaneous platoon is
assumed to be already taken [11].
2.5 Vehicle to Vehicle Communication
Connectivity is essential for autonomous driving and its development is the key for the
process of growth of the autonomous vehicles in the market. The integration of communication
technologies to the transportation systems leads to so-called intelligent transportation systems
(ITS).
Nowadays, extensive researches have been conducted on vehicular communication systems,
both vehicle to vehicle (V2V) and vehicle to infrastructure (V2I). These kind of communications
are possible using dedicated short range communication (DSRC) protocols. In particular, the
European Telecommunications Standard Institute (2008) as well as the US Federal Commu-
nications Commission (1999) decided to dedicate to the automotive use parts of the 5.9 GHz
band (respectively 30 MHz and 75 MHz). [12]
Those Vehicle ad hoc network (VANET) are the most used technology and a topic of ongoing
research. There are already standards that defines the data format and the message dictionary.
They are also characterized by a low latency (less than 200 µs within 1000m of distance), to-
gether with a fast network acquisition. Reliability of information is very important, peaks of

9
delay during communications can easily lead to safety problems between vehicles, especially
if they are traveling at a close distance. This dedicated network is able to work in high ve-
hicle speed mobility conditions and during extreme weather conditions, and improvement are
constantly made.
The main limitation is the distance between vehicle, since the latency of the data is directly
proportional to the distance. For this reason, a complimentary cellular network (CN) is often
adopted. It is used when vehicles has to communicate at a longer distance but this technology
is characterized by higher latency.
In particular, CN is characterized by peaks of latency of 4-5 seconds, not acceptable for fast
communication but it is meant as a complement to DSRC network for longer distances. [13]
Together with the DSRC radio, a GPS has to be part of the in-vehicle equipment, as well as
a radar that measures the relative speed and the distance with respect to the preceding vehicle.
GPS provides absolute position and time to the DSRC. Fusing the data from the radar and
from the GPS, together with acceleration measurements, it is possible to know the state of the
vehicle with a precision of centimeters [14]. On the other hand, it is not possible to rely just on
the radar. Its limited precisions and the fact that he can measure just relative distances imply
errors and delays in the measurement.

CHAPTER 3
OPTIMAL CONTROL THEORY
This chapter wants to provide a brief introduction to the optimal control theory and its
approaches. All the work developed has its basis on this theory. First, a generic definition
of optimal control problem is given. Then, dynamic programming (DP) and model predictive
control (MPC) approaches to solve an optimal problem are presented. Both approaches are
extensively used in this report, in particular the MPC one.
3.1 Optimization Problem
An optimization problem is formulated as [15]
minz f(z)
subj.to z ∈ S ⊆ Z
where:
z is a vector that contains all the decision variables.
Z is the domain of the optimization problem.
S defines the constraint set: all the feasible decisions admissible in the problem.
f : Z → R is the function that attributes a cost f(z) to each decision z.
10

11
The solution of the problem is the least possible cost f∗:
f∗ = infz∈S f(z)
In other words the number f∗ is the value such that:
f∗ ≤ f(z) ∀z ∈ S
If f∗ = −∞ the problem is unbounded.
If S contains to values the problem is considered infeasible.
If S=Z the problem is unconstrained.
Normally, one is also interested in finding the optimal solution, i.e. the decision whose cost
is the minimum cost. In other words, finding the z∗ ∈ S/f(z∗) = f∗.
z∗ is called optimal solution.
Therefore, the set of the solutions can be expressed by:
argminz∈Sf(z) = {z ∈ S : f(z) = f∗}
If Z is finite the optimization problem is called discrete. Optimization problems in the field of
autonomous vehicles are usually in the form of discrete problems.

12
3.2 Dynamic Programming
Dynamic programming (DP) is a technique that permits to unravel a generic optimal prob-
lem. The idea is to break the original problem down in a series of smaller optimal control
problems. This theory has been formulated by Bellman (1957) [16].
The Dynamic programming technique is based on a simple idea: the Bellman’s principle
of optimality. The principle simply specifies that for x0, x∗1, x∗2, ..., x
∗N to be optimal, also the
trajectory that starts from any intermediate point 0 ≤ j ≤ N − 1, (x∗j , x∗j+1, x
∗N ) must be
optimal.
The following example should clarify the concept: “suppose that the fastest route from Los
Angeles to Boston passes through Chicago. Then the principle of optimality formalizes the
obvious fact that the Chicago to Boston portion of the route is also the fastest route for a
trip that starts from Chicago and ends in Boston” [17]. This principle of optimality is used in
this thesis to solve optimal control problems: in order to explain how, we consider a generic
constrained finite time (discrete) optimal control problem [15].

13
J0→N (x0, U0→N ) = p(xN ) +N−1∑k=0
q(xk, uk)
subj.to xk+1 = g(xk, uk), k = 0, ...N − 1
h(xk, uk) ≤ 0, k = 0, ...N − 1
uk ∈ U
x0 = x(0)
in which N denotes the horizon length over time and xk represents the vector of the states
obtained at time k beginning at x0 = x(0) and applying to xk+1 = g(xk, uk) the input sequence
u0, u1, ..., uk−1.
q(xk, uk) is called stage cost while p(xN ) is called terminal cost. To give a practical clar-
ification, in a powertrain control problem the series of inputs u0, ..., uN usually represent the
torque and the brake, i.e. the variables that are used to control the system from the instant 0
to the instant N. The state vector of the system at time k includes the position of the car at
time k and its speed at that time.

14
The solution of the control problem is:
J∗0→N (x0) = minU0→N J0→N (x0, U0→N )
subj.to xk+1 = g(xk, uk), k = 0, ...N − 1
h(xk, uk) ≤ 0, k = 0, ...N − 1
uk ∈ U
x0 = x(0)
where J∗0→N is the optimal cost. We can now use the principle of optimality in order to solve
this control problem: a cost over a shorter horizon (from time j to time N) is here defined
Jj→N (xj , uj , ..., uN−1) = p(xN ) +
N−1∑k=0
q(xk, uk)
that is called cost to-go.

15
Consequently:
J∗j→N (xj) = minuj ,...uN−1 Jj→N (xj , uj , ..., uN − 1)
subj.to xk+1 = g(xk, uk), k = j, ...N − 1
h(xk, uk) ≤ 0, k = j, ...N − 1
uk ∈ U
x0 = x(0)
The principle of optimality specifies that this cost to-go J∗j→N (xj) can be found minimizing
the stage cost q(xk, uk) and the cost to-go J∗j+1→N (xj+1). Therefore, the only decision variable
that has to be optimized is the input at time j, uj . In fact, optimal inputs u∗j+1, ..., u∗N−1 have
been previously chosen to create J∗j+1→N (xj). This also explains why the optimal cost to-go
J∗j+1→N (xj) depends just on the state xj .
As it is possible to see, this algorithm works recursively backwards, the first step is to
determine the terminal cost:
J∗N→N (xN ) = p(xN )

16
and then proceed backwards
J∗N−1→N (xN−1) = minuN−1 q(xN−1, uN−1) + JN→N (g(xN−1, uN−1)
subj.to g(xN−1, uN−1) ∈ XN→N
h(xk, uk) ≤ 0
until the last step
J∗0→N (x0) = minu0 q(x0, u0) + J1→N (g(x0, u0)
subj.to g(x0, u0) ∈ X1→N
h(x0, u0) ≤ 0
x0 = x(0)
The main advantage of the dynamic programming technique is that the optimization takes
place one element uj at a time. However, the construction of the optimal cost to go J∗j→N (xj)
and the optimization can be rather complex [15].
3.3 Model Predictive Control
Model predictive control (MPC), also called Receding Horizon Control, is a control tech-
nique. It was invented in the seventies as a way to control chemical plants and oil refineries
[18]. Since solving real-time optimization problems requires an enormous computational power,
at the beginning it could only be applied to systems with very slow dynamics, such as chemical

17
plants. However, thanks to the computational power reached, nowadays it can be effectively
applied to various field including the automotive one.
This technique is based on the following concept: at the time step k an optimization problem
is solved until the time k+HMPC . Consequently, a series of optimal input from time k to time
k+HMPC are obtained. Then, just the first optimal input is applied. At the following time
step a different optimization problem from k+1 to k+1+HMPC is solved and, again, just the
first optimal input will be applied.
The following example should give a clear idea of the concept: if we want a car to do a lap
in a racetrack in the minimum possible time, the trivial solution would be to optimize the entire
trajectory so that the car can drive along the racetrack in the best possible way. Realistically,
though, this is not a safe solution. The car could meet some obstacle along the path and a new
optimization would be necessary at that point in order to take into account also the obstacle.
The main concept of the MPC is to optimize just a small portion of the path (until the temporal
horizon HMPC) and to apply just the first control input to the car. At the new time step, a
new optimization which takes into account the new conditions (an obstacle for example) can
be done and the entire procedure will be repeated until the lap is finished.
Note that just a single input will be applied to the system, but this first input takes into
account what will happen in the future thanks to the optimization until the horizon HMPC .
The technique is called receding horizon since, at every time step, the horizon seems to move:
from HMPC to HMPC + 1 etc.
The finite time optimal control problem is written as:

18
J∗k (x(k)) = minUk→k+HMPC |k
k+HMPC−1∑j=k
q(xj|k, uj|k + p(xk+HMPC |k)
subj.to xj+1|k = f(j, xj|k, uj|k)
xj|k ∈ X
uj|k ∈ U
xk = x(k)
and it is solved at time k. The terminology xj+k|k indicates the vector of the states at the
time j+k that is predicted at time k beginning from the initial value xk = x(k) applying to the
system xj+1|k = f(j, xj|k, uj|k) the input sequence Uk→k+HMPC |k = uk|k, ..., uk+HMPC−1|k.
As said before, thanks to the optimization at time k, an entire sequence of optimal input
Uk→k+HMPC |k is obtained, but just the first element of these inputs uk|k is applied. the entire
procedure of optimization is then repeated at time k+1, but this time until HMPC + 1.
3.3.1 Advantages and Limits
The spread of this technique has been slowed down with respect to its potentiality until the
last years. The main reason is that the various optimization procedures in real-time obviously
require high computational demand. At the same time this technique is very powerful and
it permits to address some issues of the classical feedback control. The possibility to include
control constraints in the input and process constraints in the future state are the most signifi-
cant advantages. A classical feedback control just tracks a reference trajectory and its action is

19
based on the error of the actual trajectory with respect to the reference one. It is not possible
to include input constraints, just a saturation block on the inputs. The saturation ,though, can
easily lead to instability.
Furthermore, the fact that at each time step a new optimization is provided permits to have
a feedback and this characteristic makes the controller robust to disturbances and uncertainties
of the model.
It is important to underline that using MPC it is not always possible to assure the stability
of the problem or its recursive feasibility, while some approaches can be adopted in order to
prevent these issues.

CHAPTER 4
PROBLEM STATEMENT
In this chapter, we describe the longitudinal dynamics and the powertrain model of an
electric vehicle. Both formulations will be used in all the control approaches presented in this
work.
4.1 Non-linear Vehicle Dynamics
A vehicle is a very complex non-linear system with a very high number of interacting
dynamics. However, the aim of this thesis is to develop an ecological cooperative adaptive
cruise control. Therefore, we are interested in the longitudinal dynamics of the vehicle, in
particular on the forces that act on a vehicle in motion. The energy provided to the vehicle has
to compensate three main energy losses due to:
- Air resistance
- Rolling resistance
- Brakes dissipation
The equations that describe the longitudinal dynamics of a car can be obtained using the
Newton’s second law and they have the following form [19]:
20

21
md
dtv(t) = Ft(t)− Fb(t)− Fa(v(t))− Fr − Fg(α(s))− Fd(t) (4.1)
ds
dt= v(t) (4.2)
where Ft is the traction force, Fb is the brakes resistance force, Fa is the aerodynamic force
due to the air density, Fr is the rolling friction and Fg is the longitudinal component of the
gravity force that acts when the road is not flat. Finally, Fd is a generic term that includes all
the non specified effects. This last term will be generally neglected.
Traction force
The traction force is the force that generates motion at the wheels and it can be modeled
as follow:
Ft(t) =Tm(t) gr η
sign Tm(t)t
rw(4.3)
where Tm(t) is the motor torque that will be treated as an input for our system, rw is
the radius of the wheels and gr is the gear ratio. Since we are considering an electric vehicle,
assuming a constant gear ratio is realistic; hence, gr is a constant value in this work.

22
The operator ηt is the transmission efficiency. The operator sign in Equation 4.3 catches the
fact that the electric motor also works as a generator (see below), in which case the direction
of the flow of energy is inverted. The same happens for the transmission losses.
Due to this aspect, the system the assumes two different behaviors depending on the value
of the motor torque Tm. Systems with this peculiarity are called hybrid systems and the
optimization procedure in these cases is much more complex. In order to deal with this issue,
we take into account the transmission efficiency in the powertrain model, while we will neglect
this term in the vehicle dynamics.
The electric motor provides the torque for the traction, but it acts as a generator as well.
It produces a regenerative braking, an energy recovery mechanism that improves the overall
efficiency of the vehicle. Indeed, the energy of the brakes can be chemically stored into the
battery. Therefore, the motor torque has two limits: the maximum power that can be provided
to the wheels and the maximum regenerative braking force, both function of the power of the
electric motor.
Tmin ≤ Tm ≤ Tmax (4.4)
It is reasonable to consider the maximum regenerative braking force equal in absolute value
to the maximum traction force, obtaining:

23
−Tmax ≤ Tm ≤ Tmax (4.5)
It is important to underline that the regenerative braking force cannot substitute the
friction-based braking since it drops off at lower speed. Bringing a vehicle to full stop gen-
erally requires the aid of friction brakes.
Braking force
The braking system for a car is made by different actuators, but regarding our purposes we
are interested in the maximum force that the braking actuators can generate:
Fbmax ≤ Fb ≤ 0 (4.6)
Aerodynamic losses
The air resistance force that acts on a vehicle is caused by two different components. The
first one is the viscous friction due to the air that surrounds the vehicle in motion. The second
one is the difference of pressure between the front and the rear part of the vehicle created by
the air flow separation. This aerodynamic drag force is usually approximated as:

24
Fa(v(t)) =1
2ρ cd Af v(t)2 (4.7)
where ρ is the density of the air, cd is the air drag coefficient, a parameter estimated using
Computational Fluid Dynamics (CFD) techniques, Af is the frontal area of the vehicle and v
is the speed of the vehicle in motion.
As it is possible to note, this force is a non-linear term due to the term v2 and this is the
reason why the longitudinal model of the vehicle is not linear.
As mentioned before, when a vehicle is traveling behind another one, the air resistance is
reduced due to the slipstream effect.
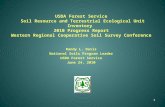
This fact can be formally considered including a reduced air drag coefficient. In particular,
the reduction will be a function of the relative distance between the two cars, i.e. cd = cd(d).
The effect of the distance in the reduction is not easily defined, as it can vary with several factors
including weather and vehicles shape. From experimental data [1] it is possible to model the
air drag reduction as a function of the relative distance between the two cars.
In this work, we will adopt two different models of drag reduction: a linear approximation
for the powertrain controller and a nonlinear function in order to better estimate fuel savings
of the Eco-CACC with respect to a traditional ACC.
In particular, the nonlinear function used has the following form [9], [8]:

25
cd(d) = cd,0
(1−
cd,1cd,2 + d
)(4.8)
where d is the distance between the two vehicles, cd,0 is the nominal (d → ∞) air drag
coefficient and cd,1 and cd,2 are parameters obtained from a regression curve created using
experimental data. A graphical representation is shown in Figure 1.
Rolling friction
The rolling friction is the resistance force that is generated when a generic body rolls onto
a surface; in this case it is generated by the wheels onto the road.
This force can be expressed as:
Fr = cr m g (4.9)
where cr is the rolling friction coefficient, a parameter function of different variables such as
speed of the vehicle and pressure of the air. However, it will be always considered as a constant
coefficient, since the influence of those variables is not critical.
Gravitational force
It is the force induced by gravity when the vehicle is not driving on a flat road.
It can be expressed as:

26
Figure 1: Linear approximation and regression curve of experimental data [1]
Fg(α(s)) = m g sin(α) (4.10)
However, in this thesis we will consider just flat roads. The evaluation of downhill and
uphill roads is very different and for this reason it will be included in future works.

27
Vehicle model final setup
In conclusion, the longitudinal dynamics of the vehicle, including all the hypothesis pre-
sented, can be written in the following form:
dv
dt=Tm(t) grrw m
− cr g −1
2mρ cd Af v(t)2 − Fb
m(4.11)
ds
dt= v(t) (4.12)
The state of our car is expressed by its position and its speed at each time. These variables
can be collected in the state vector
x = [v s]T (4.13)
while the control inputs considered are the motor torque (that provides traction to the
wheels and regenerative brakes) and the braking friction-based force. Again, these variables
can be collected in the input vector
u = [Tm Fb]T (4.14)
Numerical parameters for all the simulations presented in this work are presented in Table I.

28
TABLE I: VEHICLE AND ENVIRONMENTAL PARAMETERS
Name Symbol Value
Total mass of the vehicle [kg] m 1200
Vehicle cross-section [m2] Af 2
Wheel radius [m] rw 0.3
Drag coefficient [-] cd 0.22
Rolling friction coefficient [-] cr 0.008
Air density [kg/m3] ρ 1.22
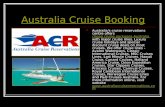
4.2 Powertrain Model
The aim of this thesis is to develop a powertrain controller which maximizes the energy
savings over the journey. In order to do so, it is necessary to model the powertrain of the electric
vehicle considered. The main idea is to capture the relation that exists between the energy
provided by the electric motor and the traction force at the wheels. The energy provided by
the electric motor is directly proportional to the electrochemical energy drained from or supplied
to the battery. The battery is recharged from the grid, hence battery energy consumption is
related to grid energy costs and possibly to pollutant emissions. Therefore, the aim is to
minimize it.

29
Figure 2: Powertrain scheme in an electric vehicle
A powertrain model of an electric vehicle should catch the efficiencies of all the main com-
ponents. Then, the transmission efficiency has to be considered. Finally, a relation between
the motor power and the wheels traction has to be found.
The power provided by the electric motor is given by:
Pm =Tm ωm
ηm(Tm ωm)(4.15)
with Tm ≥ 0
Instead, when the motor works as a generator we have:
Pm = Tm ωm ηm(Tm ωm) (4.16)
where Tm is the motor torque, ωm is the rotational speed of the motor and ηm is the
efficiency.

30
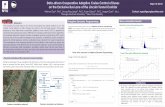
Figure 3: Nominal torque for an electric motor of 12 kW
The motor efficiency is a function of both the motor torque and its speed has to be charac-
terized for each motor.
We consider the characteristic curve of an electric motor of 12 kW obtained from exper-
imental data [20]. As shown in Figure 3, the curve that represents the behavior of a typical
electric motor can be divided in two parts: the constant torque phase and the constant tension
phase. An electric motor can distribute its maximum torque until it reaches its nominal speed.

31
Above the nominal speed, the maximum torque starts to decrease as the hyperbole 1ωm
, such
that power is kept constant. The maximum speed is linked to the resistance of the mechanical
parts. The behavior as a generator in the second quadrant can be considered specular.
From the nominal curve, knowing the power of the electric motor from experimental data,
it is possible to build the efficiency map.
However, a motor of 12 kW is not suitable for an electric vehicle. Indeed, this types of
motor are mostly adopted in hybrid vehicles.
The solution adopted is to consider a more powerful motor with scaled values. The efficiency
map, function of torque and speed, can be opportunely scaled (without significantly changing
the efficiency values) simply modifying accordingly the torque scale on the map [21].
In this work, an electric motor of 60 kW has been considered.
Then, the map needs to be further modified in order to include the transmission efficiency,
neglected in the vehicle dynamics.
The efficiency is expressed as ηsign Tm(t)t and the operator sign models the double behavior
of the electric motor which acts both as a motor and as a generator during the regenerative
braking. As a consequence, the system becomes a hybrid system. The optimization of these
kind of systems is much more complex and, for this reason, another solution has been adopted.
ηt is generally considered as constant and in this thesis the value
η = 0.9

32
has been assumed.
The transmission efficiency has been removed from the vehicle dynamics and it has been
included in the efficiency map simply multiplying the first quadrant of the motor efficiency map
for 1η and the second quadrant for η.
Overall, the map now represents a decreased “global” efficiency which takes into account
both motor and transmission efficiencies.
The efficiency map is ready. However, for the powertrain model to be useful for control
design, it is necessary to build a closed form expression for the power of the motor or alterna-
tively, for the efficiency. Note that the power and the efficiency of the motor are connected by
the simple relation:
Pm(t) = Pm(Tm(t) ωm(t)) = ηm(Tm(t) ωm(t)) · Tm(t) · ωm(t) (4.17)
The electric power generated by or supplied to the electric motor can be approximated in
the form [4], [5]:
Pm(t) = b1Tm(t)ω(t) + b2T2m(t) + b′1Tm(t) + b0ω(t) + b′0 (4.18)
where b1, b2, b′1, b0 and b′0 are tunable parameters.
However, a simpler expression is generally adopted:

33
Pm(t) = b1Tm(t)ω(t) + b2T2m(t) (4.19)
where the term b1Tm(t)v(t) represents the mechanical power provided by the motor while
the term b2T2m(t) models the thermal losses of the motor.
Equation 4.18 is tunable and it should fit the electric motor considered. In order to do so,
the correct values of the parameters b1 and b2 need to be chosen.
A fitting procedure of Equation 4.19 (which graphically represents a surface) into the power
map of the motor has been adopted, obtaining as a result the values of the tunable parameters
(see Figure 4):
b1 = 1.005 (4.20)
b2 = 0.18 (4.21)
The result of the fitting is well represented in a surface graph that shows how the experi-
mental data have been fitted into the powertrain model.

34
Figure 4: Powertrain model of an electric motor: experimental data (blue dots) and fitting
surface Pm(t) = b1Tm(t)ω(t) + b2T2m(t).
Analyzing the confidence interval of this fitting, we obtain a 95% of the confidence bounds
in the following intervals:

35
b1 = (0.981, 1.03)
b2 = (0.165, 0.21)
The width of the intervals indicates the amount of uncertainty about the fitted coefficients.
In this case, the width is acceptable, and this a proof of the validity of the expression used to
model the powertrain.
Trying to fit the data into more accurate expressions, such as Equation 4.18, the following
values have been obtained:
b1 = 0.972 (0.945, 09978)
b2 = 0.18 (0.132, 0.164)
b′1 = 10.41 (4.75, 16.06)
b0 = 13.8 (10.85, 16.75)
b′0 = −41.79 (−1124, 1040)
The results show a good confidence interval on coefficients b1 and b2, comparable to the one
of the previous fitting. However, the confidence bounds on the other coefficients is much wider.
Coefficients b′1, b0 and b′0 have a minor impact in the fitting and they are characterized by more

36
uncertainties. For this reason, the approximation of considering Equation 4.18 as a model of
the powertrain is acceptable and a more precise expression (and therefore more complex to
optimize) is not necessary.

CHAPTER 5
OFFLINE OPTIMIZATION
In order to develop the Eco-CACC, the choice of the optimization approach to adopt is
fundamental. The main goal of this chapter is to build an energy optimal drive control problem
and to study different offline approaches in order to solve it.
With the term “offline” we assume that all position and road constraints are known in
advance and there are no needs of prediction or estimations of any sort. Furthermore, compu-
tational time is not an issue to take into account.
The problem can be written in the following form:
minu∈U(x(t) J =
∫ tf
0g(u, x(τ))dτ (5.1)
subj.todx
dt= f(u(t), x(t)) (5.2)
v(0) = vi, s(0) = 0 (5.3)
v(tf ) = vf s(tf ) = sf (5.4)
where g(u, x(τ)) is the cost function of the problem i.e. the motor power of the vehicle given
by Equation 4.19 and f(u(t), x(t)) represents the non-linear vehicle dynamics.
37

38
We consider a car in a flat road that has to travel a certain distance sf in a certain time tf
with an initial and a final speed fixed. In particular, for the problem chosen we consider the
following data:
vi = 0
vf = 0
s0 = 0
sf = 200m
tf = 24s
Tmax = 700Nm
In other words, the optimization has the aim to find the best speed profile (in terms of
energy-savings) in order to compute 200 meters in 24 seconds starting and arriving at zero
speed. Vehicle parameters are described in Table I.
5.1 Pontryagin Minimum Principle
The first approach adopted consists in finding the optimal solution using analytical expres-
sions instead of numerical ones. In order to do so, we refers to Pontryagin’s Minimum Principle
(PMP) approach. [22], [23]
PMP has been invented in optimal control theory in order to find the best possible solution
for taking a dynamic system from one state to another.

39
The first step of this approach consists in defining the Hamiltonian function of the prob-
lem[4]:
H(u, x, λ) = g(u, x) + λT f(u, x) (5.5)
where g(u, x) is the cost function, f(u, x) the state dynamic function, λ the adjoint vec-
tor, u∗(t) the optimal control strategy, x∗(t) and λ∗(t) the optimal state and adjoint state
trajectories. Then according to the PMP principle:
x(t) =∂H
∂λ(x∗(t), u∗(t), λ∗(t)) (5.6)
x∗(0) = x0 x∗(tf ) = xf (5.7)
λ(t) = −∂H∂x
(x∗(t), u∗(t), λ∗(t)) (5.8)
u∗(t) = argminu∈UH(x∗(t), u, λ∗(t)) (5.9)
The formulation of the PMP principle is given by Equation 5.9. It states that, thanks to the
Hamiltonian function H, is possible to solve a different problem obtaining the optimal control
input policy u∗ of the original one.

40
A consequence of the principle is that, when the Hamiltonian function is linear with respect
to the control variables u(t), the optimal solution is at the boundaries of the control region U.
This condition takes the name of ”bang-bang” control and the function σ is introduced
σ =∂H
∂u(5.10)
This function is called switching function since when the sign changes, the variable switches
from one point at the side of the region to the opposite one.
The main difficult is to solve the differential equation system given by Equation 5.8 since
the starting conditions of the adjoint vector are unknown, while the initial conditions for the
differential equations system of the state vector (Equation 5.6) are given by Equation 5.7.
5.2 Analytical Solution
Analytical solution for the problem described in the previous section is provided. The vehicle
parameters used are described in Table I.
The state function can be written as [4]:
f(u(t), x(t)) =
(v
s
)=
(h1Tmη
sign(Tm(t))t − h0 − w
v
)(5.11)

41
where
h1 =grrwm
, (5.12)
h0 = crg, (5.13)
w =Fbm
(5.14)
and the cost function, as usual, is given by Equation 4.19.
It is possible to note that in this case the transmission efficiency is included in the state
function; for this reason the coefficients b1 and b2 does not keep into account ηt this time. Note
also that the air resistance term has been neglected in Equation 5.11. This assumption can be
justified just in those scenarios where the speed is relatively low, such as urban scenarios. In
the problem chosen, the car starts from standstill and it arrives at the same condition, so the
assumption is acceptable.
The Hamiltonian function is:
H = b1Tmv + b2T2m + λv(h1Tmη
sign(Tm(t)t − w) + λsv (5.15)
where λv and λs represent the adjoint states.
Knowing that
{T ∗m(t), w∗(t)} = argmin H(Tm, w, λ)

42
It is possible to obtain the expression of the optimal motor torque using the following:
T ∗m(t) =
{Tm(t) :
∂(H)
∂(Tm)= 0
}(5.16)
Note that the operator sign in the transmission efficiency leads to two expressions of the torque:
T+m(t) = − 1
2b2(b1v(t) + h1ηtλv(t)− h0) (5.17)
T−m(t) = − 1
2b2(b1v(t) +
h1λv(t)− h0ηt
) (5.18)
The optimal braking force is given by:
w∗(t) =
0 if λv(t) < 0
W if λv(t) > 0
(5.19)
with
W =Fb,maxm
(5.20)
While the dynamics of the problem related to the adjoint states, λv and λs, can be obtained
applying Equation 5.8:

43
λv(t) = −b1T ∗m(t)− λs(t) λs(t) = 0 (5.21)
Thus, we obtain a set of 4 differential equations, given by Equation 5.6 and Equation 5.21
and 4 unknowns (x, v, λv, λs) to solve in order to obtain the optimal control law given by
(T ∗m(t), w∗(t)).
5.2.1 Control Law Derivation
The following rules can be applied to the control law:
• if T+m(t) > Tmax then T ∗m(t) = Tmax (5.22)
• if T−m(t) < Tmin then T ∗m(t) = Tmin (5.23)
• if T+m(t) < 0, T−m(t) > 0 then T ∗m(t) = 0 (5.24)
The first two assumptions come from the fact that the maximum and minimum torque are
fixed and constant. The third one appears due to the term ηsign(Tm)t . In this case, neither T ∗m
nor T−m can be the optimal solution. Therefore, the optimal solution is given by T ∗m = 0, i.e.
coasting condition.
The evolution of the control law can be generally divided into 6 different phases [5], [4].

44
First phase
The initial condition of the car is v = 0, therefore the vehicle needs a positive torque in order
to take off. For long distances and short time the conditon T+m(t)|t=t0 will certainly appear. So,
we can define the first control law:
T ∗m = Tmax
w∗ = 0
(5.25)
for t ∈ [0, t1] where the conditions t = t1 is given by T+m(t1) = Tmax.
Knowing the control law it is possible to obtain the expression of the optimal velocity and
optimal distance in this first phase. We simply need to integrate Equation 5.6:
v =
∫ tfin
tin
v dt+ v0
and
s =
∫ tfin
tin
v dt+ s0

45
obtaining:
v = (h1Tmax − h0)t with t ∈ [0, t1] (5.26)
s = (h1Tmax − h0)t212
with t ∈ [0, t1] (5.27)
The time t1 is given by the condition T+m = Tmax, which is:
1
2b2((b1h0 + h1λs)t− h1λv,0 − b1v0) = Tmax
→ t1 =2b2Tmax + h1λv,0 + b1v0
b1h0 + h1λs(5.28)
In order to know the time t1 in our problem (as well as the optimal speeds and distances
in the next phases) we need to know the initial values of the adjoint states λv,0 and λs. These
values can be find using the terminal conditions on the states, as it will be explained later on.
Second Phase
At the time t1, when T ∗m ≤ Tmax a second phase starts with the following condition: T ∗m =
T+m .

46
Substituting the vehicle model and the adjoint state expressions (Equation 5.11 and Equa-
tion 5.21) in the expression of T+m (Equation 5.17), we obtain the control law of the second
phase:
T ∗m = 1
2b2[(b1h0 + h1λsηt)t− h1λv,0ηt − b1v0]
w∗ = 0
(5.29)
For t ∈ [t1, t2] where the time t2, that represents the end of the second phase, can be find
applying the condition T+m = 0.
Again, in order to find the optimal speed and the optimal distance of this second phase it
is necessary to integrate Equation 5.26 and Equation 5.27 and to use v|t=t1 and s|t=t1 as initial
conditions of the integrals .
The expressions of the speed and the distance of this and of the following phases are not
reported from now on, since they are very long expressions and just a matter of straightforward
substitutions.
Third Phase
The third phase starts when T+m < 0. At this point, though, T−m can be still positive.
(T+m 6= T−m due to the operator sign in the transmission efficiency). So, neither T+
m nor T−m is
the optimal solution and therefore:

47
T ∗m = 0
w∗ = 0
(5.30)
for t ∈ [t2, t3]. t3 can be found applying the condition:T−m = 0.
Again, the optimal speed and distance expressions can be found by substitution, function
of λv,0, λs, v|t=t2 and s|t=t2 . Therefore, going forward with the phases we always obtain a more
complex expressions of v and s, functions of all the previous phases.
Fourth Phase
The control law in this phase is given by the condition T ∗m = T−m .
Therefore:
T ∗m =
(12b2
(b1h0 + h1λsηt
)(t− t3)− b1v3 − h1λv,3ηt
)w∗ = 0
(5.31)
for t ∈ [t3, t4]
where v3 = v|t=t3 and λv,3 = λv|t=t3 . λv,3 can be found simply integrating Equation 5.21.
Time t4 is obtained thanks to the condition T−m = Tmin.
Fifth Phase
The control law of this phase is defined by a constant control T−m :

48
T ∗m = Tmin
w∗ = 0
(5.32)
for t ∈ [t4, t5]
This phase ends when the switching function ∂H∂w changes sign becoming positive. It is
possible to find t5 applying the following: λv(t) = 0.
Sixth Phase
Once λv > 0 the braking force is active at its maximum value. Therefore the control law is:
T ∗m = Tmin
w∗ = W
(5.33)
for t ∈ [t5, tf ] with final time tf known in advance as a parameter of the problem.
5.2.2 Results
Now, all the control laws have been developed and an analytical expression of the optimal
speed and distance for each phase can be written. However, these formulations are functions
of the initial conditions of the adjoint states λv,0 and λs, the only remaining unknowns of the
problem.

49
It can be proved [5] that the optimal speed v(t) and distance s(t) for each phase depend
only on the unknown initial conditions of the adjoint states λv,0 and λs and on the known initial
condition of the states v(0) = v0, s(0) = s0.
In order to find λv,0 and λs we use the terminal condition on the states v(tf ) = vf , s(tf ) = sf .
In this way, we can obtain two equations and solve them in order to find λv,0 and λs:
v(λv,0, λs)|t=tf = vf
s(λv,0, λs)|t=tf = sf
(5.34)
where the explicit algebraic expressions of v(λv,0, λs)|t=tf and s(λv,0, λs)|t=tf are functions
of all the control laws in each phase.
To be more explicit, we can write:
v(λv,0, λs)|t=tf =
∫ tf
t5
(h1T
∗m
ηt− h0) dt+ v5 (5.35)
Where v5 can be written as an expression function of v4 and v4 as function of v3 and so on
and so forth. In the end, they are just functions of the initial condition v0 (other than λv,0 and
λs.) A similar expression can be written for s(λv,0, λs)|t=tf . The only unknowns remaining are
λv,0 and λs in Equation 5.34. Once written the expressions of each optimal speed and optimal
distance from the first phase to the last one, we explicitly obtain two equations function of λv,0
and λs. Then it is trivial to solve them as a system of two equations and two unknowns.

50
Naturally, depending on the initial and final condition chosen, some of the six phases can
disappear. We now provide the results for the control problem described at the beginning of
the chapter that we recall here:
vi = 0
vf = 0
s0 = 0
sf = 200m
tf = 24s
Tmax = 700Nm
Using these parameters all the six phases appears in the optimal solution. Graphical repre-
sentations of the optimal torque, speed and distance are shown in Figure 5 and Figure 6.
The analytical solution provided has a great potentiality due to its computational time.
Obtaining the optimal solution is much faster than with every other numerical approach.
The main disadvantage is that the optimal control problem proposed and solved contains
some approximations with respect to the original one. In particular, the air resistance force has
been neglected and this fact is acceptable just in low speed scenarios. It is not possible to include
the air resistance term in the analytical solution because it would not be possible to find an
explicit solution of the Hamiltonian function anymore. Furthermore, in the construction of this

51
Figure 5: Analytical optimal motor torque in its six different phases
simplified problem we did not keep into account state constraints such as the position of other
vehicles around the ego vehicle. Time-variant state constraints (the position of a target vehicle
would change at every time) cannot be added in the control problem and, furthermore, it would
be useless without the possibility to include the air drag reduction term in the formulation. Even
the constraint on the maximum speed cannot be included in this problem.

52
Figure 6: Analytical optimal speed (first plot) and position (second plot) profiles
In conclusion, the analytical solution permits to solve unconstrained finite time optimal
control problems which could be easily implemented in an on-line solution. Unfortunately, the
simplifications makes the solution not applicable to real-time problems.
5.3 Dynamic Programming
The aim of this section is to solve the same optimal control problem using a numerical
technique: the Dynamic Programming. The theory of this approach has been described in

53
Chapter 3. As a recall, it basically divides the problem into various subproblems and it evaluates
the optimal cost-to-go at each step proceeding backward from the final time until the initial
one.
Naturally, it solves a discretized version of the original (continuous) problem that,in this
case, can be written as:
minu∈U J =N∑k=0
gk(uk, xk) (5.36)
subj.to xk+1 = fk(uk, xk) (5.37)
v0 = vin vN = vf (5.38)
s0 = sin sN = sf (5.39)
The numerical computation has been obtained using a Dynamic Programming Matlab func-
tion [24] that can be downloaded at [25].
The results have been compared with the ones provided by the analytical solution for two
main reasons: to check the correctness of both solutions and to provide a comparison between
the two methods.

54
Figure 7: Torque comparison using analytical solution and dynamic programming approach

55
Figure 8: Optimal speed (first plot) and position (second plot)+ of the ego vehicle using
analytical solution and dynamic programming approach
The DP approach has the advantage that can theoretically solve any finite-time constrained
optimal control problem. Which means that we can include in the state dynamics also the
aerodynamics resistance and the time-variant state constraints. It converges to the optimal
solution even with non-convex problem.

56
The main problem is the computational time. It can be relatively fast when the number of
states is low but it increases exponentially with the increase of the number of states. Further-
more, the computational time strongly depends on the grid adopted in order to discretize the
problem.
The small differences in the optimal torque between the two methods derive from the dis-
cretization of the problem. In particular, the analytical solution represents the perfect solution
of this particular problem, while the Dynamic Programming obtained a sub-optimal solution. It
is also possible to verify this conclusion checking the total cost of the two solutions. It appears
that the total cost of the analytical solution is less then the other one.
For the optimization the following grid point has been used: 801 point for each of the states
and 101 point for the input. In particular we considered just one input, the motor torque (that
includes the regenerative brake) and we neglected the friction-based braking force since it is
almost useless except for the last seconds. Adding one input would consistently increase the
computational time in the DP. Due to the discretization chosen, the optimization already takes
a discrete amount of time to be completed. It is possible to note from Figure 7 that analytical
and DP solutions differ more in the last seconds of the problem, where the second input should
be different from zero.
In conclusion, this method presents serious issues, too. The computational time is already
very high and furthermore, the time-variant state constraints we would like to add in the
problem would considerably increase the computational time. Therefore, it is not possible to

57
utilize this solution as a real-time optimization. Its main use is to verify the correctness of other
solution adopted.
5.4 Numerical Optimization: YALMIP Toolbox
The third approach analyzed is a numerical optimization using a Matlab toolbox: YALMIP[26].
The toolbox is consistent with MATLAB interface and it relies on external solvers for the op-
timization. The optimization structure is much simpler to build with respect to the DP or
the creation of an analytical solution. Furthermore, numerical solvers usually provides very
accurate solution and they are very fast.
The solver adopted depends on the problem YALMIP needs to solve,( e.g. if the problem
is linear or non-linear, convex or non-convex) and it can be chosen by the user.
When the optimization problem is non-linear (as it happens including the aerodynamic
resistance in the vehicle dynamics) the solver chosen in this thesis is IPOPT [27]. The name is
an acronym for Interior Point OPTimizer; it utilizes interior point methods, a class of algorithms
that solves non-linear problems. However, when the problem is non-linear there is not any
guarantee that the solution obtained is the global minimum and not just a local one. Indeed, if
the problem is non-convex, it can presents more than one minimum and not always the solver
is able to converge to the global one. For this reason, when possible, it is preferable to use
other solutions, like an analytical solution or a Dynamic Programming approach, which always
converges to the global minimum.
For the class of problem solved during this work, the numerical approach turns out to be
the best one: it is very fast and it does not give convergence problems.

58
As mentioned before, the only aspect not included in the vehicle dynamics is ηsign(Tm(t))t but
its behavior has been included into the powertrain model, as described in the previous chapter.

CHAPTER 6
ONLINE OPTIMIZATION
In this chapter the optimal control problem used in the real-time Eco-CACC has been
analyzed.
6.1 Optimal Control Problem
The optimal control problem adopted for the online optimization assumes the following
form:
J∗(x(t)) = minu∈U(x(t))
N−1∑k=0
g(xt+k, ut+k) (6.1)
subj.to : dmin ≤ sref (t+ k)− s(t+ k) ≤ dmax (6.2)
δ ≤ vref (t+ k)− v(t+ k) ≤ δ (6.3)
x(t+ k + 1) = f(k + t, x(k + t), u(k + t)) (6.4)
Tm(t+ k) ∈ [Tmin, Tmax] (6.5)
v(t+ k) ∈ [vmin, vmax] (6.6)
v(t) = vin s(t) = sin (6.7)
where x(t) = [v(t), s(t)]T .
59

60
The last four constraints represent respectively the non-linear dynamics of the system, the
limitations on the torque and the speed and the initial conditions of the problem. These
constraints appear in the offline optimization as well.
The first two constraints are related with the target vehicle position (sref ) and speed (vref ).
The first one (Equation 6.2) states that the ego vehicle has to maintain a minimum and maxi-
mum distance from the target vehicle. It is a safety constraint that assures that the ego vehicle
is not going to bump with the preceding vehicle. The maximum distance assures that the spon-
taneous platoon formation between the two vehicles is maintained. Note that the controller
receives forecast about the position and the speed of the target vehicle at each time step.
Finally, Equation 6.3 limits the difference of speed between the two vehicles. Indeed, a huge
speed difference can easily lead to stability problems and it should be avoided. δ, dmin and
dmax are constant values.
The cost function g(xt+k, ut+k) is, as usual, the powertrain model of the vehicle and it is
represented by Equation 4.19.
6.2 Suboptimality of the Solution
The optimal control problem described would lead to an optimal solution just along the
horizon of the forecast. In other words, if the controller receives forecast 10 seconds long, the
result of the optimization would be the best trajectory for the ego vehicle in the next 10 seconds.
This solution is sub-optimal because it does not take into account what it will happen from the
tenth second on. Indeed, the controller does not take into account that the vehicle will continue
to travel from the tenth second on.

61
In order to solve this issue, we modify the cost function of the control problem in such a
way it takes into account also what it will happen after the end of the horizon.
There are two main issues responsible for sub-optimality. First, the vehicle will tend to arrive
at the end of the horizon with the mimimum kinetic energy in order to use less fuel in those
10 seconds. But, the kinetic energy provided by the powertrain to the vehicle is conservative
and it can be used during the future trajectory. There is no need to minimize it. Therefore, it
should not be included in the cost function of the problem. Otherwise the vehicle would always
decelerate at the end of the horizon.
A similar concept applies for the distance traveled. The vehicle will tend to travel the
minimum possible distance along the horizon (which means that the ego and the target vehicle
will be at their maximum relative distance at the end of the horizon). However, the distance
that the vehicle does not travel along the horizon, will be traveled in the future seconds.
To address these issues, two terminal costs are introduced in the cost function of the problem
that now assumes the following form:
J∗(x(t)) = minu∈U(x(t))
N−1∑k=0
g(xt+k, ut+k) + p1(xt+N ) + p2(xt+n) (6.8)
where p1(xt+N ), p2(xt+n) represent two costs that take into account the behavior of the
vehicle after the end of the horizon and they are function only of the state of the vehicle at the
end of the horizon.

62
6.3 Penalization of the Terminal Kinetic Energy
We consider a platoon formation in which the target vehicle is traveling at a constant speed
and the ego vehicle is already at the maximum relative distance. The optimal solution provided
by the Eco-CACC without any terminal cost (shown in Figure 9), consists in a first acceleration
of the ego vehicle and then a strong deceleration in order to conclude with the minimum kinetic
energy. This solution is optimal along the horizon but it does not take into account that in the
future the vehicle will have to accelerate again in order to follow the target vehicle. Globally,
this condition implies a huge dissipation of energy.
A penalization of the terminal kinetic energy is thus introduced:
p1(xt+N ) =1
2bkm(v2ref,fin − v2fin) (6.9)
where vref,fin and vfin are, respectively, the speed of the target vehicle and the speed of
the ego vehicle at the end of the horizon. The controller receives vref,fin as part of the forecast
and it computes the optimal vfin
The less the kinetic energy at the end of the horizon the more the penalty added by the
terminal cost.
bk is an empiric coefficient (> 1) that takes into account extra motor losses linked to speed
oscillations.

63
Figure 9: Relative speed between the ego and the target vehicle with and without penalizationof the kinetic energy
Including this terminal cost in the formulation of the problem, the ego vehicle follows the
target vehicle at a constant speed without any acceleration or deceleration and the global energy
consumption is thus reduced.

64
6.4 Penalization of the Terminal Distance
The issue presented in the previous example has been addressed thanks to the penalization
of the terminal kinetic energy. However, in the previous scenario the two vehicles already were
at their maximum relative distance. If not so, the ego vehicle would have decelerated in order
to be as far as possible from the target vehicle at the end of the horizon. The trivial reason of
this behavior is that traveling more distance implies a higher cost. The point again is that this
optimal solution is not taking into account what it will happen after the end of the horizon:
the vehicle is going to continue its journey.
As a reminder, the distance traveled by the ego vehicle within the horizon is bounded by
the position of the target vehicle. The most conservative position for the ego vehicle at the end
of the horizon occurs when the two vehicles are at their maximum relative distance. Calling
sN the absolute position of the ego vehicle at the end of the horizon the condition appears
when sN = smin,N . Every more meter traveled will cause the ego vehicle to be closer to the
target vehicle. In terms of absolute position, the minimum relative distance between them is
represented by sN = smax,N .
The terminal cost on the distance should therefore compensate the quota of friction asso-
ciated to every extra meter the vehicle travels within the horizon. In this way, the terminal
position of the ego vehicle will not be affected anymore by this aspect.
The terminal cost should be a function of the relative distance between the two cars:

65
p2(xt+N ) = 4Efriction(smax,N )−4Efriction(sN ) (6.10)
where 4Efriction(smax,N ) is the energy dissipated during the journey over the horizon when
the ego vehicle has traveled the maximum distance. While 4Efriction(sN ) is function of the
final position of the ego vehicle.
Friction is a nonconservative force, so an average friction for all the trajectory has been
considered.
4Efriction = FM,friction 4s
where
FM,friction = cdρAf4s2
24t2+ crg m (6.11)
The first term represents the viscous force, the second one the rolling friction.
Therefore the terminal cost assumes the following form:
p2(xt+N ) = (As2max,N +B)smax,N − (As2N +B)sN (6.12)

66
with
A =cdρAf2N2
(6.13)
B = crg m (6.14)
However, a terminal cost with a cubic function of the states such as Equation 6.12 makes
the problem too complex to be solved in a reasonable time.
The best solution would be to obtain a linear functon of the states. In this way the terminal
cost would not add any complexity to the optimization procedure.
For these purposes, it is possible to write p2(xt+N ) as function of the relative distance d
between the two vehicles, since:
d = smax,N − sN (6.15)
Substituting, we obtain the following expression of the terminal cost:
p2(xt+N ) = A(d3 − 3 d2 smax,N + 3 d s2max,N ) +B d (6.16)

67
Considering a prediction horizon of N = 10s and an average speed of the ego vehicle of
v = 20 ÷ 22m/s we obtain smax,N ≈ 200m while d can always vary from 2 to 20 meters.
Therefore, the first two terms in the expression are negligible since they appears to be two or
three orders of magnitude smaller than the third one, and the terminal cost can be written as:
p2(xt+N ) ≈ (3As2max,N +B)(smax,N − sN ) (6.17)
Equation 6.17 is now a linear function of the states, since the only variable is sN , the position
of the ego vehicle at the end of the horizon. A, B and smax,N are just constant values.
6.5 Results
Results on the impact of the terminal costs are now presented. The scenario considered
is again the one in which the target vehicle is traveling at a constant speed and no air drag
reduction is included in the simulation. The ego-vehicles starts at a intermediate relative
distance sin = 12m and the two vehicles starts at the same speed vin = 22m/s.
It is possible to note how in the baseline scenario (with no terminal costs) the ego vehicle
has the minimum possible speed at the end of the horizon and it has traveled the minimum
possible distance. Introducing the terminal cost on the kinetic energy, the vehicle would not
tend anymore to decrease its speed but still at the end of the horizon it is as far as permitted
from the target vehicle. Introducing both terminal costs, the ego vehicle follows the target
vehicle at a constant speed and at a constant distance.

68
Figure 10: Relative speed (first plot) and distance (second plot) between the ego and the targetvehicle with and without the terminal costs
The main goal of introducing terminal costs is to approximate the behavior of the vehicle
after the end of the horizon. Therefore, they will be use in every simulation from now on. Their
validity is general since the theory presented has nothing to do specifically with the scenario
presented.

CHAPTER 7
CLOSED LOOP SIMULATIONS WITH EXPERIMENTAL FORECAST
In this chapter simulation results of the Eco-CACC developed are presented. The scenarios
have been chosen in order to show the behavior of the powertrain controller in different situ-
ations. A comparison with a traditional Adaptive Cruise Control in terms of energy savings
is also presented. Forecast of position and speed of the target vehicle are obtained using ex-
perimental data. In particular, data from a real vehicle have been collected while driving in
different roads and highways around the Silicon Valley . Furthermore, an external Simulink
toolbox provides a better estimate of the energy savings of the Eco-CACC.
7.1 QuasiStatic Simulation Toolbox
QuasiStatic Simulation Toolbox (QSS TB) is a Simulink toolbox that permits to estimate
fuel consumption for the majority of powertrain systems, including the electric ones. It is very
simple and fast to use. At the same time, it provides quite accurate results [20].
It reverses the relationship of cause-effect that exists in a dynamic system: it does not
uses forces to determine accelerations and speed profiles but the exact opposite. It calculates
acceleration and it determines the necessary forces starting from a given speed profile.
The QSS TB approach can not capture dynamic phenomena (represented by differential
equations) since it is a QuasiStatic approach. However, it takes into account various elements
which are not considered in the powertrain model adopted in the controller.
69

70
7.1.1 QSS Outline
Figure 11: QSS outline and elements not included in the model adopted in the Eco-CACC
As it possible to see from Figure 11, QSS receives as an input the speed profile and it
provides the fuel consumption of the electric battery of the vehicle considered. To do so, it
takes into account different elements not included in the powertrain model.
The equations of the vehicle dynamics do not change but a non-linear air drag dependence
function of the distance instead of a linear one has been considered. There are not real-time
issues in the energy savings calculation, so accuracy can be increased.
Regarding the transmission part of the model, the idle power loss is here included and it
is also possible to take into account the switching model caused by the transmission efficiency

71
property. In the model adopted by the controller we included the transmission efficiency in the
efficiency map of the motor, but in this case is possible to include the switching model directly
in the transmission model.
The electric motor model considered is far more complex than the one adopted by the
controller since it takes into account inertia, an efficiency map and even an overload check which
prevents the motor from working out of its speed and torque boundaries. Battery efficiency is
also considered, function of the current i and of the state of charge (SOC). These dependences
are usually non-linear and too complex to be included in the controller model.
7.1.2 QSS Goals
QSS is used in this work for two main puroposes:
• Model validation
• Fuel consumption estimation
QSS TB can be used as a model validator since it reverses the cause-effect relationship of
the dynamic systems. The powertrain controller finds the optimal torque for a certain system.
The torque is then applied to the model and the consequent acceleration is obtained. From the
acceleration profile a consequent speed profile is finally determined. This speed profile can be
adopted as input of QSS TB. Reversing the usual cause-effect relationship, the toolbox obtains
the consequent torque. If the QSS torque is similar to the Eco-CACC one, it means that the
simplified model adopted in the controller is acceptable.
The main function of the toolbox is to provide the fuel consumption for a powertrain sys-
tem. In the case of electric motor it gives the battery consumption for a given speed profile.

72
We can compare the battery consumption obtained using the Eco-CACC with respect to the
consumption of a traditional ACC.
7.2 Simulation Setup
7.2.1 Forecast Data
Figure 12: Experimental speed profile collected driving in the Highway 101 around the SiliconValley

73
The results presented in this chapter are simulations obtained in a Matlab environment.
However, the forecast data that the ego vehicle receives from the target vehicles are experimental
data which have been collected driving a real car in the highway and in urban roads around the
Silicon Valley. The trajectory of the ego vehicle is always bounded by the position of the target
vehicle. Using real data we assure that the optimal trajectory obtained for the ego vehicle can
be associated with realistic scenarios.
Note that even if all the trajectory of the target vehicle is known in advance, the controller
is set up to receive just the portion of data within its prediction horizon.
7.2.2 Energy Savings
The total energy consumption of the vehicle is an important parameter but is more conve-
nient to analyze the energy savings that the Eco-CACC can perform with respect to a baseline
controller. We consider as a baseline controller an Adaptive Cruise Control that simply follows
the target vehicle at a fixed distance of 12 meters. In both cases, the fuel consumptions are
calculated using the QuasiStatic Toolbox.
7.2.3 MPC Parameters
A table with the MPC parameters used in all the simulations is presented.
The sampling time choice is a trade-off between computational power and accuracy. In
literature different choices are described; generally they go from 0.05 seconds [28] to 0.5 seconds
[29]. The smaller the sampling time the better it is. For our purposes, a sampling time of 0.5
seconds would not make the solution feasible, taking into account that a car would travel several
meters between one sample time and the other. On the other hand, the smaller the sampling

74
TABLE II: MPC PARAMETERS
Name Symbol Value
Prediction Horizon [s] N 10Sampling time [s] Ts 0.1Minimum relative distance [m] dmin 2Maximum relative distance [m] dmax 20Initial relative distance [m] din 12
time, the more computational power is required with the risk that the controller can not work
in real time. A sample time of 0.1 seconds is considered a good trade-off for this work: it makes
the solution feasible in all the scenarios adopted and the controller turns out to be powerful
enough to be able to work in real time.
A prediction horizon of 10 seconds is an optimistic assumption. It means that the ego
vehicle knows in advance the trajectory of the target vehicle for the future 10 seconds. This
assumption is not always realistic in case of traffic or with a non-autonomous target vehicles.
In those conditions, the simulations can fully show the potentiality of the Eco-CACC as well
as an upper bound on the energy savings.
A minimum distance of two meters between vehicles is commonly adopted in the platoon
literature [30]. High speeds, acceleration or decelerations of the vehicles and communications
delays can easily lead to safety problems. However, in this work, we do not take care of safety
issues at a deep level. We analyze the full potentiality of the controller, taking into account
that an emergency braking system can be necessary in order to guarantee safety.

75
A maximum relative distance of 20 meters has been chosen accordingly to the prediction
horizon of 10 seconds. In order for the controller to work at its full potentiality, the ego vehicle
needs to be able to have full capacity of movement within its position boundaries. The ego
vehicle should be able to pass from dmax to dmin or vice versa in 10 seconds. Otherwise, the
optimal solution of the controller would become too much sensitive to the horizon chosen. Note
that this powertrain controller is meant to be part of a hierarchical system of two levels. The
high level should decide whether or not the ego vehicle should platoon with the target vehicle.
The assumption considered in this work is always that platooning is the best solution.
7.3 Scenarios
In this section three different simulation scenarios are proposed and analyzed. The first two
are highway scenarios, in which the vehicles travel in the highway 101. The last one presents
an urban scenario which explicitly includes traffic.
7.3.1 Highway Scenario 1
In this first case, the vehicles are traveling in the highway and the target vehicle is acceler-
ating. As it possible to note from Figure 17, initially the ego vehicle catches up with the target
vehicle. The reason is that being at a close inter-vehicular distance permits to reduce the fuel
consumption. At the same time the controller performs a speed smoothing : it tries to avoid
every speed oscillation, since this behavior would increase the amount of energy dissipated. As
a consequence, once the ego vehicle has caught up, it does not follow the target vehicle at a
fixed distance, but it continuously varies its relative distance in order to save more energy.

76
Figure 13: Extract of speed profile of target and ego vehicles (first plot) and their relativedistance (second plot) of “Highway Scenario 1”
The entire simulation has a time frame of more than three minutes in which it is possible
to observe how the optimal solution is not just a simple catch up but it requires a continuous
variation of the distance between the target and the ego vehicle. As a result, the speed profile
of the ego vehicle is smoother.

77
Figure 14: Speed profile of target and ego vehicles (first plot) and their relative distance (secondplot) of “Highway Scenario 1”
7.3.1.1 Model Validation
In this scenario a model validation of the controller is also proposed. The model adopted
by the Eco-CACC is compared with the more detailed one used in QSS TB and differences are
analyzed. As it possible to note from Figure 15 the torque obtained by the controller and the
one used for validation are very similar. The QSS torque is always a little bit higher. This result

78
Figure 15: Comparison between the controller optimal torque and the QSS validation using thesame speed profile
was expected: QSS Toolbox takes into account elements not included in the model adopted by
the controller and the majority of those elements are extra-losses. Therefore, in the QSS model
a higher torque is necessary in order to travel the same distance with the same speed.
7.3.1.2 Energy Savings
The main aim of this work is to develop a controller which provides energy savings with
respect to a more traditional form of Cruise Control. Therefore, we compare the energy con-
sumption of the vehicle using the Eco-CACC and a traditional ACC. The ACC-based ego
vehicle just follows the target vehicle at a fixed distance of din = 12m. There is neither a initial

79
Figure 16: Energy consumption comparison using the Eco-CACC and a traditional ACC re-sulting in energy saving of 15.6 %
catch up, nor a smoothing of the speed profile. Therefore, the energy savings of the Eco-CACC
can be divided into two contributes in this scenario. The first one is the fact that being at a
closer inter-vehicular distance reduce fuel consumption. The second one is that accelerations
and decelerations leads to more dissipations and the Ego-CACC tries to avoid them.
As a result, using the powertrain controller developed, energy savings of 15.6% have been
obtained with respect to an Adaptive Cruise Control.
Energy savings have been calculated using QSS TB in order to obtain a more precise esti-
mation.

80
Figure 17: Speed profile of target and ego vehicles (first plot) and their relative distance (secondplot) in “Highway Scenario 2”
7.3.2 Highway Scenario 2
This scenario represents a slow-down scene in the highway. The target vehicle, after a first
acceleration, starts to decelerate. The optimal solution provided by the Eco-CACC has similar
characteristics of the one described in “Highway Scenario 1”. First, there is a catch up. After
that the ego vehicle does not follow the target one at a fixed distance but it continuously changes

81
the relative distance. Again, the ego vehicle speed profile is smoother than the one of the target
vehicle.
However, in this case, the first catch up would not be necessary. In the global optimal
solution, the ego vehicle would have waited more time before to catching up. This limitation is
given by the prediction horizon. The controller knows the behavior of the target vehicle for the
future 10 seconds, not for the whole trajectory and therefore, at time zero, it can not predict a
future deceleration of the target vehicle.
In this scenario, the energy savings obtained using the Ego-CACC with respect to an ACC
are 21.7 %. This value, as mentioned before, can be considered as an upper bound since it
is not always possible to know the behavior of the target vehicle in the future 10 seconds. At
the same time, the controller can work with any horizon. The shorter the horizon the less
the energy savings. In any case, the controller will compute the optimal trajectory using the
available data.
7.3.3 Urban Scenario
An urban scenario is now presented. In this case, the traffic conditions play an important
role in the simulation. The target vehicle speed profile presents wide oscillations due to the
traffic on the road. In this case, the optimal solution for the ego vehicle is not represented by an
initial catch up. The oscillations are too wide and the savings obtainable thanks to a reduced
aerodynamic force would be compensated by losses due to accelerations and decelerations. As
a consequence, the relative distance between the two vehicles varies a lot during the simulation.

82
Figure 18: Speed profile of target ego vehicles (first plot) and their relative distance (secondplot) in an urban scenario
Very high energy savings of 73.4 % with respect to the baseline ACC have been obtained.
However in this scenario, due to the traffic conditions, availability of forecast is not always
possible. Also, the flexibility of the ego vehicle in deciding its speed and position may be limited
by other closeby vehicles. On the other hand, this scenario fully underlines the potentiality of
the Eco-CACC in terms of energy savings.

83
It may be not possible to have a perfect forecast of 10 seconds due to the traffic but as an
alternative it is possible to consider an approximate forecast. For this case, the speed profile of
the target vehicle can be modeled as a sinusoidal trajectory. Even if the powertrain controller
does not receive a perfect forecast, it can still elaborate a future forecast using the frequency
and the amplitude of the modeled sinusoidal trajectory. Energy savings of 73.4 % demonstrate
that there is big room for acceptable results even without a perfect forecast. This topic will be
part of future work, though, and it is not discussed further in this thesis.

CHAPTER 8
EMBEDDED IMPLEMENTATION
All the simulations presented in the previous chapters have been developed using software
tools such as Matlab and Simulink, which are non-real-time environments. In this chapter,
the computational time issue is analyzed in more detail. A real software in a vehicle can not
run on Matlab environment, though. An embedded software has to be written for a particular
hardware. This fact usually implies time and memory constraints. The algorithm has been
rewritten in a suitable environment for embedded implementation and time issues have been
faced and solved. Moreover, hardware in the loop simulations have been tested, in order to
move a step forward for the implementation of the code in a real vehicle.
8.1 Time Constraint
One of the biggest issue in the development of a real-time algorithm is the time constraint.
In the previous simulations we adopted a prediction horizon of 10 seconds. Which means that
the controller needs to find an optimal solution for the next ten seconds. This procedure has
to be entirely repeated every sampling time, i.e. every 0.1 seconds. If the controller needs
more than 0.1 seconds to find the optimal solution, then it does not have time for the next
optimization. The controller can work in real-time only if every optimization requires less than
the sample time to be solved. If the condition is not satisfied, the only way is to increase the
84

85
sampling time or to decrease the prediction horizon with repercussions on the quality of the
solution.
The algorithm has been written trying to avoid as many non-linearities as possible in the
model in order to decrease the process time during the optimization. Prediction horizon and
sampling time have been chosen in such a way that the algorithm always works in real-time
when it runs on Matlab. In Figure 19, a graphical representation is shown.
However, for a given scenario, computational time depends on the hardware used and on
the solver chosen for the algorithm. For this reason, there is no guarantee that the solver can
really work on a real vehicle yet.

86
Figure 19: Computational time in Matlab environment of ”Highway Scenario 2” with N=10s,
Ts=0.1s
8.2 FORCES Pro Code Generator
FORCES Pro [31] is a tool for mathematical optimization. It converts a code written in
Matlab into a C-language code which can be implemented in an embedded system. In other

87
words, this tool is a code generator. The optimal problem needs to be rewritten using FORCES
syntax but still in a Matlab environment. Then, the optimal control problem is not solved
anymore using IPOPT [27] but always with interior point methods.
Figure 20: Optimal torque, speed and relative distance of the ego vehicle in ”Highway Scenario3” are shown in the first second and last plot respectively

88
Matlab environment is very convenient for pure software simulation but the code can not
be used for hardware simulation, in other words for real testing. The code needs to be written
using C language in order to be implemented on an embedded platform.
This tool has its own Matlab syntax and a new code has been developed. The main difference
with the previous one is the initial guess. The code generated by FORCES Pro requires an
initial guess for all the states of the system, not just for the initial ones. At any time different
from zero the initial guess is given by the optimal solution at the previous time step. At time
zero a input sequence of zero value is guessed and applied to the dynamic system.
The initial guess choice is important since it affects the computational time of the solution.
Once the optimal problem is written, the code is automatically generated on line using
FORCES Pro servers. It turns out that the solver, which uses C language is much faster that
the one created on Matlab environment. Furthermore, this code can be perfectly embeddable
on any implementation which has a C compiler.
In order to compare the two solvers and their computational time, we analyze a new scenario
(“Highway Scenario 3”). Similarly to the previous ones, a target vehicle is accelerating in the
highway and then suddenly decelerating. Every parameter is identical to the previous scenarios
except for the prediction horizon. It has been set to 12 s in order to stress more the time
constraints of the solvers.
As it is possible to note from Figure 20, both interior point solvers obtain an almost identical
solution for the same scenario. Since the problem is nonlinear, the same optimal solution is not
guaranteed and some small differences in the solution are expected. The most notable aspect

89
Figure 21: Computational time comparison between IPOPT and FORCES solvers.
is highlighted in Figure 22, though. FORCES solver is about five time faster with respect to
IPOPT one. This is a positive result, since it is the C code generated by FORCES the one that
can be actually implemented in an embedded machine.

90
8.3 Hardware in the Loop Simulation
Until now, a control software has been developed and tested in a non-real-time environment.
However, pure software based simulations can not capture sufficiently real-time conditions and
they can not provide enough confidence and reliability. Therefore, it is wise to consider an
intermediate phase in the middle between pure software and pure hardware testing on a real
machine. This phase is called Hardware in the Loop (HIL) Simulation.
This process consists in testing the control software on a target Electronic Control Module
(ECM) simulator in real-time. The hardware is then connected to another computer which
simulates the controlled process dynamics in real-time. In this way, it is possible to test the
control software on a real hardware without using a real plant (such as a real vehicle).
In this thesis we analyze the algorithm developed on the computational time point of view.
A dSPACE HIL simulator has been used in order to simulate an Electronic Control Module.
Until now, every simulation run on a generic computer processor and, therefore, it could not
provide a precise indication regarding whether or not the algorithm developed effectively works
in real-time.
dSpace MicroAutobox 1401, (IBM PowerPC processor capable of running at 800 MHz) has
been used for the HIL simulation.
The result obtained is shown inFigure 22 and it proves that the controller can be embeddable
in a real machine with a sample time of 0.1 and an horizon of 8 seconds.

91
Figure 22: Computational time during a Hardware in the Loop simulation with Ts=0.1 s andN=8 s

CHAPTER 9
CONCLUSION
This chapter presents general conclusions of the work developed.
Optimal control theory has provided the basis for the creation of an Ecological Coopera-
tive Adaptive Cruise Controller that aims to minimize fuel consumption of electric vehicles.
The main idea consists in taking advantage of platooning in terms of fuel consumption while
maintaining a spontaneous approach.
Various steps have been necessary in order to develop a real time optimal controller.
First, we have discussed the longitudinal dynamic of the vehicle, capturing elements which
play an important role in terms of fuel consumption. Air drag coefficient has been modeled as a
function of the relative distance between vehicles. The powertrain model of the electric vehicle
has been also developed using experimental data from a real electric motor.
Second, we have analyzed different optimization techniques, both analytical and numerical.
We have compared them and outlined their potentialities and drawbacks, and we have finally
chosen the technique which best address our needs.
Third, we have designed a model predictive controller for real-time implementations of
the Eco-CACC. The terminal costs have especially been designed to give the controller the
capability to anticipate what is gonna happen to the vehicle after the horizon.
At this point, once the optimization technique have been chosen and the control problem
defined, we have extensively tested the Eco-CACC. We have evaluated different highway and
92

93
urban scenarios using experimental data collected driving in the Highway 101 and in the urban
areas of the Silicon Valley around the city of San Francisco. Then, we have evaluated the
performances of the Eco-CACC in terms of fuel consumption, making a comparison with a
traditional ACC. Energy savings have been calculated using a high-accuracy model. The same
model has been used also to validate the simplified model adopted in the powertrain controller.
Finally, we have addressed the problem of computational time. We made sure the con-
troller is able to work in real-time, and not just during simulations in a Matlab environment.
Hardware in the loop simulations have been performed implementing a C-language code into
HIL simulator. The positive results make the controller ready to be tested on real autonomous
vehicles.

CITED LITERATURE
1. Hucho, W.-H.: Aerodynamics of road vehicles. Butterworth-Heinemann, (1987).
2. Environmental Energy Agency: Eurostat Statistics. url: http://ec.europa.eu/eurostat/.
3. Association For Safe International Road Travel: Annual global road crash statistics.[Online]. http://asirt.org/initiatives/informing-road-users/road-safety-facts/road-crash-statistics.
4. Sciarretta, A., De Nunzio, G., and Ojeda, L. L.: Optimal ecodriving control: Energy-efficient driving of road vehicles as an optimal control problem. IEEE ControlSystems, 35(5):71–90, Oct 2015.
5. Dib, W., Chasse, A., Moulin, P., Sciarretta, A., and Corde, G.: Optimal energy manage-ment for an electric vehicle in eco-driving applications. Contr. Eng. Prac., 29:299–307, Aug 2014.
6. Chang, D. and Morlock, E.: Vehicle speed profile to minimize work and fuel consumption.Journal of Transportation Engineering, 18:173–182, 2005.
7. Shladover, S.: PATH at 20. history and major milestones. IEEE Transactions on IntelligentTransportation Systems, 8:584–592, 2007.
8. Turri, V., Besselink, B., and Johansson, K. H.: Cooperative look-ahead control for fuel-efficient and safe heavy-duty vehicle platooning. IEEE Transaction on ControlSystem Technology, PP(99):1–17, April 2016.
9. Turri, V.: Fuel-efficient and safe heavy-duty vehicle platooning through look-aheadcontrol. SE-100 44 Stockholm, Sweden, KTH School of Electrical Engineering,(2015). Licentiate thesis.
10. Argonne National Laboratory USA: [Online]. http://energy.gov/eere.
11. Basso, M.: Eco Platoon Formation For Autonomous Electric Vehicles. Politecnico diTorino, (2016). Licentiate thesis.
94

95
CITED LITERATURE (continued)
12. Guo, J. and Balon, N.: Vehicular ad hoc networks and dedicated short-range communica-tion. Technical report, University of Michigan, Deaborn, MI, USA, 2006.
13. Santa, J., Gomez-Skarmeta, A. F., and Sanchez-Artigas, M.: Architecture and evaluation ofa unified V2V and V2I communication system based on cellular networks. ComputerCommunications, 31(12):2850–2861, 2008.
14. Sahlholm, P. and Johanson, K. H.: Road grade estimation for look-ahead vehicle controlusing multiple measurement runs. Control Engineering Practice, 18(11):1328–1341,2010.
15. Borrelli, F., Bemporad, A., and Morari, M.: Predictive control for linearand hybrid systems. (2015). In preparation, available online at
http://www.mpc.berkeley.edu/mpc-course-material.
16. Bellman, R.: Dynamic Programming. Princeton, NJ, USA, Princeton University Press,(1957).
17. Bertsekas, D.: Dynamic Programming and Optimal Control, volume II. Belmont, Mas-sachusetts, USA, Athena scientific, 2001.
18. Richalet, J., Rault, A., Testud, J. L., and Papon, J.: Model Predictive Heuristic Control:Applications to Industrial Processes. Automatica, (1978).
19. Guzzella, L. and Sciarretta, A.: Vehicle Propulsion Systems, Introduction to modeling andoptimization. Springer, (2005). Third edition.
20. Guzzella, L. and Amsutz, A.: The QSS Toolbox Manual. Institute of Energy TechnologyETH Zurich, 2005.
21. Wipke, K. B. and Cuddy, M. R.: Using an Advanced Vehicle Simulator ADVISOR toGuide Hybrid Vehicle Propulsion System Development. National Renewable En-
ergy Laboratory, Golden, CO, USA, 1996. http://www.hev.doe.gov.
22. Bryson, A. E. and Ho, Y. C.: Applied optimal control: optimization, estimation andcontrol. Washington, D.C., Hemisphere, (1975).
23. Pontryagin, L. S., Boltyanskii, V., Gamkrelidze, R. V., and Mischchenko, F.: TheMathematical Theory of Optimal Processes. New York, Interscience, (1962).

96
CITED LITERATURE (continued)
24. Sundstrom, O. and Guzzella, L.: A generic dynamic programming matlab function. ControlApplications, (CCA) & Intelligent Control (ISIC), IEEE, jul 2009.
25. Sundstrom, O. and Guzzella, L.: DPM-function. Institute for Dynamic Systems andControl Department of Mechanical and Process Engineering, ETH Zurich, 2009.http://www.idsc.ethz.ch/research/downloads.
26. Lofberg, J.: YALMIP: a toolbox for modeling and optimization in MATLAB. IEEEInternational Symposium on Computer Aided Control System Design, Sept 2004.
27. Wachter, A. and Biegler, L. T.: On the implementation of a primal-dual interior pointfilter line search algorithm for large-scale nonlinear programming. MathematicalProgramming, 106(1):25–57, 2006.
28. Turri, V., Besselink, B., Martesson, J., and Johansson, K. H.: Fuel efficient heavy dutyvehicle platooning by look ahead control. 53rd IEEE Conference on Decision andControl, December 2014.
29. Santin, O., Pekar, J., Beran, J., and D’amato, A.: Cruise controller with fuel optimiza-tion based on adaptive nonlinear predictive control. SAE Int. J. Passeng. Cars -Electron. Electr Syst., May 2016.
30. Alam, A., Gattami, A., Johannson, K., and Tomlin, C. J.: Guaranteeing safety forheavy duty vehicle platooning: Safe set computations and experimental evaluations.Contr. Eng. Prac., 24:33–41 2014.
31. Domahidi, A. and Jerez, J.: FORCES Professional. embotech GmbH (url:http://embotech.com/FORCES-Pro), July 2014.
32. Bertoni, L.: Ecological Cooperative Adaptive Cruise Control for Autonomous ElectricVehicles. Politecnico di Torino, (2016). Licentiate thesis.
33. Zheng, Y., Li, S. E., Li, K., Borrelli, F., and Hedrick, J. K.: Distributed model predictivecontrol for heterogeneous vehicle platoons under unidirectional topologies. In IEEETransaction on Control System Technology, 2016.

VITA
NAME Lorenzo Bertoni
EDUCATION
Master of Science in “ Mechanical Engineering ”, University of Illinoisat Chicago, Dec 2016, USA
Specialization Degree in “ Energy and Nuclear Engineering ”, Oct 2016,Polytechnic of Turin, Italy
Bachelor’s Degree in Energy Engineering, Jul 2014, Polytechnic ofTurin, Italy
LANGUAGE SKILLS
Italian Native speaker
English Full working proficiency
2014 - IELTS examination (7.0)
A.Y. 2015/16 Two semesters of study abroad at University of Califor-nia, Berkeley
A.Y. 2015/16 One semester of study abroad in Chicago, Illinois
SCHOLARSHIPS
Fall 2015 Italian scholarship for final project (thesis) at UIC
Fall 2015 Italian scholarship for TOP-UIC students
TECHNICAL SKILLS
Advanced level Matlab and Simulink
Average level ERP SAP SD
WORK EXPERIENCE AND PROJECTS
2017/Present Consultant at Oliver Wyman
2014/2015 Research Assistantship (RA) position (10 hours/week) at Polytechnicof Turin, Italy
2014/2015 Co-Founder of a startup (Corner Pop)
97

98
VITA (continued)
Ago 2014 Volunteer in Africa. Hospital La Croix, Cotonou (Benin)