Towards Ad-hoc Situation Determination Graham Thomson, Paddy Nixon and Sotirios Terzis.
26
Towards Ad-hoc Situation Determination Graham Thomson, Paddy Nixon and Sotirios Terzis
-
Upload
thomasine-anderson -
Category
Documents
-
view
218 -
download
0
Transcript of Towards Ad-hoc Situation Determination Graham Thomson, Paddy Nixon and Sotirios Terzis.

Towards Ad-hocSituation Determination
Graham Thomson, Paddy Nixon and Sotirios Terzis
Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Introduction
PlaceLab has been successful in making location information freely available for use in experimental ubiquitous computing applications.
We envisage a need for tools that can deliver a much richer set of contextual information.
The high-level situation of the current environment is a key contextual element.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Scenario
Jane captures a ‘coffee break’ snapshot on her smartphone and instructs it that both calls and messages should be announced audibly when she is in that situation.
Historical snapshot of ‘formal meeting’ captured from context server.
In a partner company’s building her smartphone is unable to determine the situation. The local context server reveals it is ‘formal meeting’, and the previously associated behaviours are applied.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Drawbacks of the state of the art Require an environment expert. Reasoning mechanisms must be manually
constructed and maintained. Difficult to specify sensor to situation
correlations on a large scale. Situation specifications will suffer from the
subjective bias of the expert. Reasoning is performed by a single oracle
which cannot exploit non-public knowledge. Once programmed, situations are fixed.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Drawbacks of the state of the art Require an environment expert. Reasoning mechanisms must be manually
constructed and maintained. Difficult to specify sensor to situation
correlations on a large scale. Situation specifications will suffer from the
subjective bias of the expert. Reasoning is performed by a single oracle
which cannot exploit non-public knowledge. Once programmed, situations are fixed.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Representing the situation
Contextual information is captured as a relation between two instances of a class.
Ubiquitous computing environments are open - any number and variety of people, devices, and software may appear within them.
Contextual information they produce are therefore also open, as the instances of a relation are drawn from a potentially infinite set.
Reasoning about contextual information is then made difficult, as many machine learning techniques make strict demands on the structure and constraints of the data, e.g. the C4.5 algorithm.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Representing the situation
Text classification aims to automatically assign documents to a given set of categories.
Documents may exhibit no regular structure.
The set of known terms used in the documents may grow with each new document that is classified.
Easy to see similarities between the task of text classification and that of situation determination.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Situation as a document
Document Bag of terms. Situation Bag of relations. A relation is expanded to facilitate
reasoning at an abstract level.
Jane Robertworks with

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Situation as a document
Person
Person
Jane Robertworks with
Robertworks with
works with
Janeworks with
Person Person
Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Situation as a document
To reason about snapshots, we must transform them into a representation suitable for machine learning algorithms.
Use vector space model - considers a document to be a vector in a multi-dimensional Euclidean space, with each axis corresponding to a term.
Extra time axis added to vector, scaled from 0 (midnight), to 1 (just before midnight).
Approach based on Support Vector Machines (SVM), which are currently the most accurate classifiers for text.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Determining the situation
+
+
+
+
+
+-
-
-
-
-

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Determining the situation
+
+
+
+
+
+-
-
-
-
-

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Determining the situation
+
+
+
+
+
+-
-
-
-
-

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Determining the situation
+
+
+
+
+
+-
-
-
-
-

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Determining the situation
+
+
+
+
+
+-
-
-
-
-
Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Drawbacks of the state of the art Require an environment expert. Reasoning mechanisms must be manually
constructed and maintained. Difficult to specify sensor to situation
correlations on a large scale. Situation specifications will suffer from the
subjective bias of the expert. Reasoning is performed by a single oracle
which cannot exploit non-public knowledge. Once programmed, situations are fixed.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
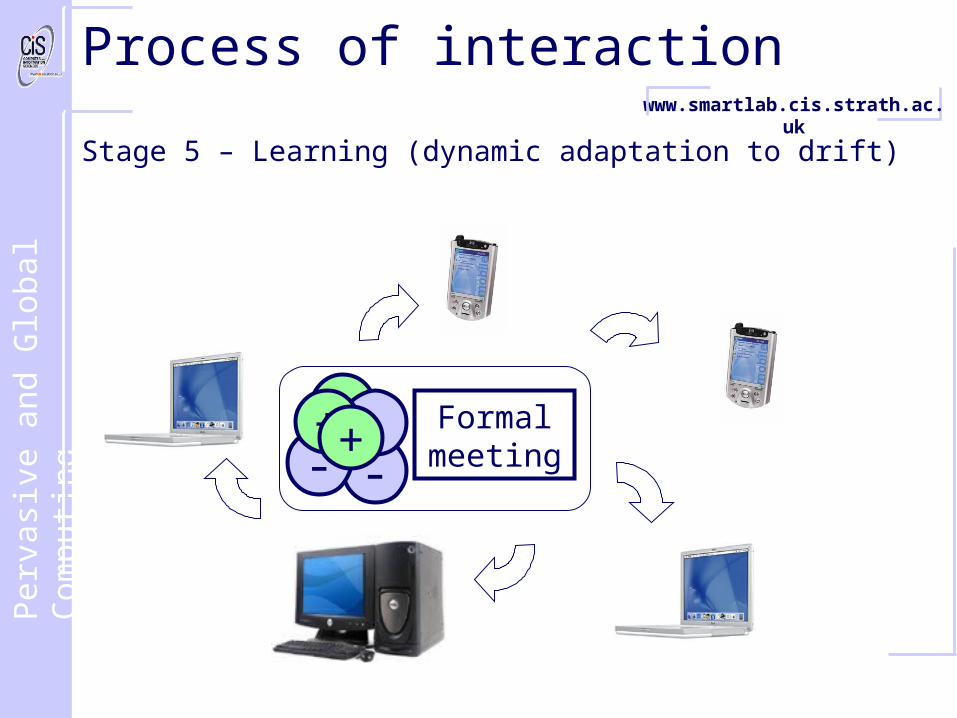
Process of interaction
Determining the situation within an environment is a cooperative effort between each participant (device) within it.
Each participant’s view is the union of its private, privileged, and public relation sets.
Make simplifying assumption that participants are in the same situation if they are in the same room.
Interaction proceeds as in the following five steps:

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Process of interaction
Stage 1 – Proposal of current situation
Formalmeetin
g
Formalmeetin
g
Formalmeetin
g
Formalmeetin
g
Coffeebreak

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Process of interaction
Stage 2 – Sharing of relevant snapshots
+
+++
+ +
++
+--
- --
-
-

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Process of interaction
Stage 3 – Correction (freshness, confidence, accuracy, derivation algorithm)
P = 2.3
P = 2.35
P = 1.8
P = -34P = ?

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Process of interaction
Stage 4 – Heuristic selection (strongest non-obvious indicator)
Formalmeetin
g
Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Process of interaction
Stage 5 – Learning (dynamic adaptation to drift)
Formalmeeting-
+ --++

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Drawbacks of the state of the art Require an environment expert. Reasoning mechanisms must be manually
constructed and maintained. Difficult to specify sensor to situation
correlations on a large scale. Situation specifications will suffer from the
subjective bias of the expert. Reasoning is performed by a single oracle
which cannot exploit non-public knowledge. Once programmed, situations are fixed.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Preliminary results
Situations: Formal group meeting European project meeting Informal meeting Coffee break Private study Movie night
Ubicomp environments are highly dynamic - new situations will continually appear, while current situations will cease to recur.
The system must achieve an acceptable determination accuracy using as few snapshots as possible.

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Preliminary results
Average determination accuracy
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100 120
Number of snapshots
Acc
ura
cy (
%)

Perv
asi
ve a
nd
Glo
bal C
om
pu
tin
g
www.smartlab.cis.strath.ac.uk
Preliminary results
Almost all misclassifications occurred between the three meeting situations.
THANK YOU!