Title 微小粒子の超高精度分級システムの開発 (2005) Issue ...E.E. 置.E 1050577938...
40
Title 微小粒子の超高精度分級システムの開発 Author(s) 松坂, 修二 Citation (2005) Issue Date 2005-05 URL http://hdl.handle.net/2433/84818 Right Type Research Paper Textversion publisher Kyoto University
Transcript of Title 微小粒子の超高精度分級システムの開発 (2005) Issue ...E.E. 置.E 1050577938...
-
Title 微小粒子の超高精度分級システムの開発
Author(s) 松坂, 修二
Citation (2005)
Issue Date 2005-05
URL http://hdl.handle.net/2433/84818
Right
Type Research Paper
Textversion publisher
Kyoto University
-
l i
--BEE
・E・-BEl l
---EEBEBEE-
-1 ・EE--E畢i
l
---EES-EE---
ー、.E... E .... E置.E
i |
E ... E ..... .
|
"陪M院詰“HH"HH"H"H"目“E
| |
.E.EE .. E ... EE.E
箇...... EE薗
l | | | |
〆厳闘留闘臨臨臨酎酎臨邸酎掠船
置冨
.E.冨霊.
.
E.E
•
a.EEE.霊也
.a'審.霊曇
| | |
.E .. E ... E .... E
l | | |
.圏..... E.E.置.E
1050577938
-
微小粒子の超高精度分級システムの開発
(課題番号 14550736)
平成 14年度~平成 16年度
科学研究費補助金(基盤研究(c)(2))
研究成果報告書
平成 17年 5月
研究代表者松坂 修二
(京都大学大学院工学研究科・助教授)
-
はしがき
本報告書は,平成 14年度から平成 16年度までの 3年間,科学研究費補助金(基盤研
究 (C)(2))によって行われた「微小粒子の超高精度分級システムの開発J(課題番号
14550736) の研究成果をまとめたものである.
{研究組織】
研究代表者:松坂修二
(京都大学大学院工学研究科・助教授)
研究分担者:増田弘昭
(京都大学大学院工学研究科・教授)
{交付決定額(配分額)1
直接経費 間接経費
平成 14年度 2ラ 100 O
平成 15年度 lラ 000 。平成 16年度 900 。総計 4ヲ 000 。
(金額単位:千円)
合計
2ラ 100
1ラ 000
900
4ラ 000
-
【研究発表}
松坂修二ラ村西健嗣、増田弘昭 rニ軸ローラ一方式によるはんだ、ボールの粒度分級j粉体工学会誌ラ 42ラ11か115(2005)
< Intemational Conference> Mizutani, Y., M. Miyazaki, S. Matsusaka and H. Masuda; "Analysis of Movement of
Spherical Particles in a Twin Roller System for Size Classification", 10th APCChE,
Kitakyushu, 0141 in CD, (2004)
Matsusaka, S. K. Muranishi and H. Masuda; "High Efficiency Classification of
Spherical Particles Using a Twin Roller", Proceedings of The 2nd Asian Particle
Technology Symposium, Penang Malaysia, Vol. II, 347幽 351(2003)
11
-
目次
l 緒 言 一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一 l
2 実験装置および方法 一一一一一一一一一一一一一一一一一一一一 2
3. 実験結果および考察 一一一一一一一一一一一一一一一一一一一 5
3.1 粒子のローラーへの付着(回収率の評価) 一一一一一一一一一一一一一一一 5
3.2 粒子の移動速度 一一一一一 一一一一一一一一一一一一一一一一 7
3.3 分級精度 一 一 一 一 一 一 一 一一一一一一一一一一一一一一一一一 12
4. 結言 一一一一一一一一一一一一一一一一一一一一一一一一一一日
5. Appendix contents 一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一 17
Appendix 1 一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一 19
Appendix 2 一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一- 25
Appendix 3 一一一一一一一一一一一一一一…一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一- 35
111
-
Bonding wire (Au wire)
Solder ball
1.緒
近年、高付加価値型製造業では、機能性材料の開発に加えて、要素配列による性能の
向上、新たな機能の付与、集積化が行われている 1,2)。この傾向は、粉粒体による複合
成型体の製造だけではなく、微小要素から成る電子デ、バイス、マイクロマシーン、ディ
スプレイなどの微細組立工程にも見られる。徽密な配列制御を行うには、要素(粒子あ
るいは微小部品)の形と大きさを揃える必要があり、これらの品質保証に対する要求は
非常に厳しくなってきた。
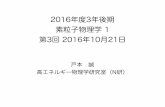
例えば、電子産業における半導体パッケージは、多ピン型リードフレームを用いてプ
リント基板と接続する QFP(Quad Flat Package) が主流であったが、多ピン化と小型化
を同時に実現することが困難なため、パッケージの底面lこ4はんだ、ボールラを格子状に配
列する BGA(Ball Grid Array)が開発された 3)。はんだ、ボーノレの直径は数百ミクロンであ
り、接点不良を防ぐには粒子径のバラツキを数ミクロン以下(おおよそ 1パーセント以
下)に抑えなければならない。
はんだボールを簡で分級することは可能ではあるが、実際には白開きの精度や目詰ま
りなどの問題がある。風力分級法は連続運転が可能であり、分級精度も比較的高いが、
すべての粒子について相対誤差を 1パーセント以内で保証することは容易ではない。
Beeckmans & Thielen 4) は、微小な開き角をもっ二軸ローラーの間隙を利用して分級する
方法を提案し、分級の結果に及ぼす操作条件の影響について検討した。この装置は機構
が簡単で、運転が容易であり、球形粒子を高精度で分級できるとしづ特長があるが、ロ
ーラー上の粒子の挙動や分級精度に関する詳細な検討は行われていなし10
本研究では、二軸ローラ一分級装置による球形粒子の分級実験を行い、ローラーへの
粒子の付着の問題、粒子の移動速度および分級精度を検討するG
nu
--EA
F3
凸し
vri vd x
o
pA E
‘、仇pvj j
h一uxoiデ,
hao一JI0
1010toJF
hEF
一siE
,
'O31010λ
一一
101046M
'一ryox山市開一命令一:
QFP (Quad Flat Package) BGA (Bal1 Grid Array)
-
2.実験装置および方法
Fig. 1に、実験装置の概略構成を示す。ホッパーの中心には回転円筒型の供給装置が
鉛直に設置しであり、粒子は回転円筒に設けられた微小孔から一粒ずつ落下し、チュー
ブを経て二軸ローラーまで移動する。粒子の供給量は、供給装置の回転速度によって調
節できる。
ローラーは歪みの少ない特殊鋼で出来ており、表面には硬化処理および研磨処理が施
されている(算術平均粗さ Ra= 0.1μm、算術平均うねり肋=0.1 μm)o ローラーの半
径は 14mm、長さは 246mmであり、粒子をこ軸ローラーの部総に沿って移動させるた
めに水平に対して最大 250 までローラーを傾けることができる。二軸ローラーの間隙
(最小表面間距離)は、軸受部に取り付けられた微動ネジによって調節でき、中心線に
対するローラーの開き角 αを 0'""-'0.020の範囲で変化させた。ローラーの間隙の校正に
は、非接触式レーザーマイクロメーター(オムロン(槻 3Z4L欄 S501R、精度 0.3μln)を用
いた。二軸ローラーの回転方向は互いに逆向き(すなわち、進行方向に向かつて右側の
ローラーは時計回り、左側のローラーは反時計四り)であり、球形粒子にはローラーと
の摩擦によって上向きの力が加わる。なお、ローラーの角速度ωの操作範囲は 0'""-'14.1
radlsとした。粒子は、重力を受けながらローラーの間際に沿って移動し、間隙の幅が
粒子径より広くなると落下する。分級された粒子は、鉛直下方に設置した容器に粒度ご
とに分離・回収される。ローラー上で分級されなかった(大きし、)粒子は終端部ですべ
て回収される。
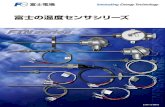
使用した粒子は、球形の樹脂をはんだでコートした‘はんだボールフ(ミクロパール
SOL、積水化学工業(械)のであり、その SEM写真を Fig.2に示す。本実験では、粒子径
分布の評価を行うのではなく、ローラー上の粒子の挙動および分級精度について検討す
るため、予め土5μmの範囲で粒度を揃えたものを使用した。はんだ、ボールの個数基準
中位径 Dpおよび、粒子密度ppをTable1 ~こ示す。ローラー上の粒子の移動速度およびロ
ーラーから落下する位置は、ビデオマイクロスコープ(オリンパス(槻 OVM1000N)で
測定し、粒子径の測定には顕微鏡法を用いた。なお、実験は室内環境下(温度 20'""-'250
C、
湿度 30'""-'70%)で、行った。
間 2・
-
、、.. ,ノふEEbn
・
唱
EA
00
=φ xe
PU
J'aa--
、、
x=220mm (endpoint)
Feeder (Rotating cylinder)
Roller (r = 14 mm, 1 = 246 mm)
(b) Top view (twin roller unit)
Fig. 1 A schematic diagram of the experimental apparatus
「コ
-
200μm
Fig. 2 SEM photograph of particles used (plastic balls with solder)
闇 4圃
-
3. 実験結果および考察
3.1 粒子のローラーへの付着(回収率の評価)
ローラー上の粒子に働く接線方向の重力成分が摩擦力よりも大きいとき粒子は移動
するが、微小粒子では垂直荷重に及ぼす付着力の影響が大きくなるので移動しにくくな
る。粒子がローラーに付着すると、付着粒子はローラーの回転によって外向きに運ばれ、
下方から二軸ローラーの間隙に巻き込まれて押しつぶされたり壊されたりする。また、
ローラーの表面を傷つける恐れもあるので、付着した粒子は完全に除去しなければなら
ない。本装置には、ブラシがローラーの外側に取り付けてあり、粒子がローラーに付着
しでも完全に除去できるので運転に支障はないが、粒子の回収率を考えると、できるだ
け付著しにくい条件で運転すべきである。
Fig. 3は、粒子の回収率yとローラーの角速度ωの関係を、粒子径九をパラメーター
として示したものである D ここでは、二つのローラーを平行(開き角α立 0) に配置し、
ローラーの間隙は個数基準中位径よりも 10同小さくした。ローラーの田転を停止する
と粒子は移動しないが、ローラーの角速度を大きくすると移動できる粒子の割合が増え
て回収率は増加した。比較的大きい粒子 (Dpニ 550μm) は、ローラーをわずかに回転
させるだけで付着しなくなり、すべての粒子を回収することができた。しかし、粒子径
を小さくすると付着性が強くなり、回収率を高めるためには、ローラーの角速度をさら
に大きくする必要がある。粒子径が比較的小さい 120μmでは、ローラーの角速度を 14.1
radlsまで上げても全粒子を回収することはできなかった。したがって、これ以下の微小
粒子を分級するには、ローラー上の粒子に働く付著力および摩擦力を低減するための処
置をローラーに施す必要がある。
凶 5凶
-
~\
\~
Dp (μm)
O 550 ム 290
α= 0 ロ 250 θ 口 100 O 120
5 10 15 ハU
声、d
ハU
ハU
¥へ
RhQロO叫ハV山
WMmuhMO
〉。QOMO
目。一z-M吋仏
国 6-
Angular velocity,ω(rad/s)
Fig. 3 Effect of angular velocity of rollers and partic1e diameter on the recovery
efficiency of partic1es
-
3.2 粒子の移動速度
粒子は二軸ローラーの間隙に沿って移動するため、処理速度(単位時間当たりの処理
粒子数)は粒子の移動速度によって決まる(処理速度は、粒子の移動速度を平均粒子間
距離で、割った値に等しし'¥)0 粒子の移動速度は間隙の幅に依存し、ローラーの間隙が粒
子の進行方向に向かつて広がるとわずかに遅くなることが、予備検討で、分かつたが、こ
こでは、粒子の移動速度に大きな影響を及ぼすローラーの角速度と傾斜角に焦点を絞る
ため、前節と同様に二つのローラーを平行(聞き角α ニ 0) に配置し、ローラーの間隙
は個数基準中位径よりも 10μm小さくして実験を行った。
Fig.4に、粒子の移動速度れとローラーの角速度ωの関係を示す。粒子の移動速度の
測定位置は、ローラーへの粒子の供給位置を x= 0 (Fig. 1参照)として 20'""'-'70mm、95
'""'-'145 mm、170'""'-'220mmの3区間とし、粒子が 50mm移動するときのそれぞれの平均
速度を求めた。同図より、ローラー上の粒子の移動速度は、ローラーの角速度に正比例
することがわかる。また、測定する位置には依存しないので、粒子はローラー上ですぐ
に定常に達することもわかる O
Fig.5は、粒子径Dpをパラメーターとして、移動速度九とローラーの角速度ωの関係、
を示したものである (Dp= 120, 250, 290ラ 550μ,m,回収率?を 25%、Fig.3参照)。粒子の移
動速度に粒子径の影響は見られず、いずれの粒子径においても移動速度はローラーの角
速度に正比例した。
Fig.6は、粒子の移動速度れとローラーの傾斜角の正接tanθとの関係、を、ローラーの
角速度ωをパラメーターとして示したものである。粒子の移動速度はローラーの角速度
によって異なるが、いずれの角速度においても傾斜角の正接に正比例した。 Figs.5ラ 6の
結果をまとめると、粒子の移動速度は粒子径には依存せず、ローラーの角速度および傾
斜角の王接に正比例する。
Fig. 7は、すべての実験結果を用いて、ローラーの角速度と傾斜角の正接の積ωtanθ
に対する粒子の移動速度引を示したものであるが、良好な正比例の関係、が見られる。
すなわち、
νx = k rωtan θ (1)
ここで、 kは比例定数l.07)、rはローラーの半径 (0.014m)である。角速度のは、
無次元量の時間微分値であり、ローラーの表面で生じる現象に対して、物理的な意味を
もたないため、ローラーの半径rを乗じて周速度 rのとした。
幽 7-
-
0.05 Measuring section
2004iox=0020~0070 口 x口 0.095~ 0.145 rn
I~~
長に。qh みJ O 03 r A x :=: O 170 ~ 0 220 1n
0.02
3001β~ α O
θ= 100
1/戸 Dp ここ 550 μm O O 5 10 15
Angular velocityラ ω(rad/s)
Fig. 4 Relationship between particle velocity and angular velocity of rollers
(effect of measuring section on particle velocity)
酬 8酬
-
0.05
-、V-3J 004θ100
I~~
+h 4 0.03
Dp (μm) t。J 宮 0.02 O 120
百qにふぶ 0.01 口 250 ム 290
仏ro O 550
O O 5 10 15
Angular velocityヲ ω(rad/s)
Fig. 5 Relationship between particle velocity and angular velocity of rollers
(effect of particle diameter on particle velocity)
制 9欄
-
0.12 = 100
0.5
Relationship between partic1e velocity and tangent of inc1ination angle
m
u・
ハσハU
ヲ
戸
、J
ハUm
h
J
一…α
D P
0.4 0.2 0.3
tanθ(-)
-10 -
(rad/s)
14.1 12.6 10.5 8.4 6.3 4.2 2.1
OJ
口-ム@ム田〈〉
11
ハUハUハU
Fig.6
0.04
。。ハUハU
(∞
¥g)ばれと50目。〉
ω-Q吉吋仏
-
0.12
日
|よ 0.08
h ~
Q o dぷ
ZO 04 Q
t d 広吋
Dp (μm)
O 550 ム 290 ロ 250
。L120 2 4 6
ωtan θCrad/s)
α=0
ωニ 2.1 ~ 14. 1 rad/ s
θ 云 5~250
ハVハV
Fig. 7 Primary factors affecting particle velocity
聞 11幽
-
3.3 分級精度
本装置は、微小な開き角をもっ二軸口一ラーの間隙を利用して分級するものであり、粒
子が真球であれば厳密な粒度分級が可能であるが、球形度にバラツキがあるとその影響
が現れる。すなわち、多数の粒子を分級して得られた粒度分布から分級精度を評価する
場合、球形度のバラツキと装置の分級性能を区別することができない。そこで、真球と
見なせる l儒の基準粒子を繰り返して実験に使用することにした凸基準粒子の直径は中
位径に等しく、任意の方向における 6箇所の直径の相対誤差が、デジタル画像上の検出
限界 (0.3%)以下であるものを選んだ。なお、 250μm以下の微小粒子では繰り返して
実験を行うことが難しかったので、ここでは 550μmと290μmの粒子を用いることに
した。
分離径は落下位置によって決まるため、目的に応じて回収容器の位置と範囲を決めれ
ばよいが、分級精度を考えるには、粒子の落下位置のバラツキ(偏差L1x)を把握してお
く必要がある。落下位置の偏差を小さくするには、開き角を大きくする方法が考えられ
る。しかし、間隙の変化率は逆に大きくなって分級性能を低下させる原因になる。した
がって、落下位置の偏差みをそのまま評価するのではなく、 Eq.(2)によってローラーの
間隙の偏差Ll8~こ換算し、本装置の分級精度を評価することにした。
Ll8 = 2 L1x tanα(2)
Fig.8に、 550μmの基準粒子を用いて得られた偏差Aδの結果を示すG 操作条件は、傾
斜角θ=100、開き角α コ 0.002~0.0200、ローラーの角速度ω= 2.1 ~ 14.1 radlsである。
ローラーの角速度を大きくすると粒子の挙動の乱れや回転に伴う間隙の変動が心配さ
れたが、特別な影響は見られなかった。また、ローラーの開き角を大きくすると、落下
位置に対する間隙の変化率が大きくなるので、分級精度への影響が懸念されたが、開き
角を大きくすると落下位置の変動が小さくなり、開き角を;J¥さくすると溶下位置の変動
が大きくなるので、結果として、分級精度への影響は見られなかった (Table2参照)0
なお、同一粒子を繰り返して実験に使用したが、実験の回数の増加による精度への影響
はなかった。
Table 3 は、傾斜角 θ ニ 5~200、粒子径 Dp = 290 、 550μm、ローラーの角速度ω=2.1~
14.1 radlsで変化させたときの分級精度の結果をまとめて示したものである。ここでは、
傾斜角と粒子径の条件を独立に設定して、ローラーの角速度を変化させたときの偏差Ll8
の範囲を記したが、分級精度に及ぼす傾斜角および粒子径の影響は特に見られず、偏差
Ll8は土0.3μm(相対誤差は土0.1%)の範囲にあり、二軸ローラ一方式による粒度分級装
置は極めて高い分級精度を有していることが分かつた。
園 12帽
-
2 Dp = 550問n
θ= 100 塁
ハ凶一
O
OQU
ロ
口一《以
ム芯
ムCO口。
。八日
|liトi
i
ハU
3NれロouS〉ω凸
ロ α=0.0100O α= 0.0020
ム α=0.0050 O α= 0.0200
幽 2O 10 15 5
Angular velocitうら ω(rad/s)
Fig. 8 Accuracy of size classification by the twin roller system
醐 13-
-
Table 1 Particles used (plastic balls coated with solder)
Particle diameter¥Dp (問n)
Particle density,内 (kg/m3)
* Number base median diameter
120
3720
250
2860
290 550
3180 2930
Ta b I e 2 Experimental results for accuracy of size classification
(Dp = 550同九 θ=100ラ ω=2.1,-..., 14.1 rad/s)
Opening angle α(0) 0.002 0.005 0.010 0.020
Standard deviation L1δ(μm) 0.20 0.24 0.22 0.23
Ta b I e 3 Experimental results for accuracy of size classification (α 口 0.0020)
Inclination Particle diameter Angular velocity Range of deviationネangle θ(0) Dp (μm)ω(rad/ s) L18 (μm)
5
10
20
290 6.3,-..., 14.1 550 4.2,-..., 14.1
290 2.1,-..., 14.1 550 2.1,-..., 14.1
290 550
2.1,-..., 14.1 2.1,-..., 14.1
* Number of samples: 10,-..., 14
-14 -
圃 0.3,-...,+0.2欄 0.3,-...,+0.3
幽 0.3,-...,+0.3圃 0.2,-...,+0.2
同 0.2,-...,+0.3帽 0.3,-...,+0.3
-
4. 結
山
間
付
制
同
州
例
制
門
付
凶
作
刷
刷
8
R
lvh
〆'E1
二軸ローラ一分級装置を用いて 120~550μm の球形粒子(はんだ、ボーノレ)の分級実験を
行い、以下の結論が得られた。
1 )ローラーの回転を停止すると、粒子はローラーの表面に付着して移動できなくなる
が、ローラーの角速度を大きくするとローラー上を移動できる粒子の割合が増える。粒
子を小さくすると付着性が強くなるので、回収率を高めるためにはローラーの角速度を
大きくする必要がある。
2) ローラー上の粒子の移動速度は、粒子径には依存せず、ローラーの角速度および傾
斜角の正接に正比例する。
3) ローラーの角速度が、 2.1~ 14.1 radJs、聞き角が 0.002~0.0200、傾斜角が 5~200、
粒子径が 290問および 550μmにおける分級精度(相対誤差)は土0.1%で、あった。
N omenc1ature
Dp : partic1e diameter
k : constant in Eq. (l)
: length of the roller (= 0.246 m)
r : radius ofthe roller (= 0.014 m)
v x : velocity of partic1es moving along the gap between rollers
x : coordinate along the center line of the twin roller system
L1x : deviation of initial point of partic1e falling
α : opening angle of the roller axis from the center line
r : partic1e recovery efficiency
L15 : deviation of gap width corresponding to initial point of partic1e falling
θ : inclination angle of the roller axis 合omthe horizontal axis
舟:partic1e density
ω: angular velocity of rollers
国 15欄
-
References
1) KobayashiラM.ラT.DanラH.Fudouzi and N. Shinya;“Development of N ew Handling
Techniques for Particle Assemblageラ" J Soc. Powder Technol. .Aαrpan, 35ラ 125皿 134(1998)
2) KobayashiラM.ラ自.Miyazaki and N. Shinya;“New Functional Materials Created by the
Techniques of Particle AssemblageヘJSoc. Powder Technol. Japan, 40ラ 664-671(2003)
3) Liuラ1.J.ラH.BergラY.Wen, S. Mulgaonker, R. Bowlby and A. Mawer;“Plastic ball grid array
(PBGA) overviewラ;λ4αter.Chem. Phys., 40ラ 236開 244(1995)
4) Beeckmans J. M and S. Thielen;“Performance Characteristics of the Rol1er皿 gapParticle
ClassifierヘPowderTechnol., 48ラ 181・185(1986)
5) OkinagaラN.ラK.Matsushita and Y. N agai:“Excel1ent Reliability of Plastic Cored Solder Bal1"ラ
Proceedings of Intenlational Conference on Electronics Packagingラpp.370-375ラTokyo(2003)
開 16-
-
5. Appendix contents
Appendix 1
Matsusaka, S. K. Muranishi and H. Masuda; "High E伍ciencyClassification of Spherical
Particles Using a Twin Roller"ラ Proceedingsof The 2nd Asian Particle Technology
SymposiumラPenangMalaysiaラ、'01.11ラ347-351(2003)
Appendix 2
MizutaniラY.ラM.MiyazakiラS.Matsusaka and H. Masuda; "Analysis of Movement of
Spherical Particles in a Twin Roller System for Size Classification", 10th APCChEラ
Kitakyushu, 0141 in CD (2004)
Appendix 3
The others
圃 17-
-
Appendix 1
HIGH ACCURACY CLASSIFICATION OF SPHERICAL PARTICLES
USING A TWIN ROLLER SYSTEM
Shuji Matsusaka, Kenji Muranishi and Hiroaki Masuda
Department of Chemical Engineering,
Kyoto University, Kyoto 606開 8501Japan
Keywords: Size c1assificationフ sphericalpartic1e, twin roller
Abstract
Size classification of spherical particles has been studied experimentally. The particles used
are in a range from 120 to 550μ,m. The experimental apparatus consists of a feederラ atwin
roller unit and containers for collecting particles classified. The two rollers can be set at a
desired angleθ合omthe horizon with a small angle between the two axes. Each particle that is
fed from the feeder moves along the gap between the two rollers. As the gap increases
downstreamラtheparticles fall down at a certain point and come into one ofthe containers. The
experitnental resu1ts showed that the velocity of particles moving along the gap between the
rollers was proportional both to the angular ve10city ofthe rollers and to the tangent ofthe angle
e. The error of the size c1assification was within 1 μm in diameter.
Introduction
In recent yearsラ highaccuracy size classification is required. F or exanlpleラ minutespherical
solder particles are used for soldering of ball回 gridarray (BGA) for size reduction of electronic
devices [Liu et a1.ラ 1995]. The solder particles of several hundred microns should be classified
within an accuracy of several microns. In industryラ screeningis commonly used for particle
size classification because of simple mechanism and greater capacity. There areラ howeverヲ
some disadvantagesラl.e.ラ screensare gradually clogged and particle size varies within a certain
range. The other methods such as air classificationラ alsoラ have a limit to obtain
mono醐 dispersedparticles [Iinoyaラ 1995]. A classifier with a twin roller unit may be suitable
for obtaining high accuracy mono-dispersed particles. The perfornlance of the classifier and
the behavior of particles have not been clarified yet.
In the present workラ weanalyze the behavior of spherical particles moving along the gap
between twin rollers and evaluate the performance of the classifier.
幽 19帽
-
Method
The experimental apparatus consists of a feederラ atwin rol1er unit and containers for collecting
particles classified (Yutaka Co・ヲ YSW). The main part of the classifier is shown in Figure 1.
The two rol1ers can be set at a desired angle 企omthe horizon (θ 三250)with a smal1 angle to the
center line (α三0.0020). Each particle that is fed合omthe feeder moves along the gap between
the two rol1ers. To prevent the particles from adhering to the rol1ersラ therollers can be rotated
(ω三14radls). As the gap increases downstreamラtheparticles fall down at a certain point and
come into one of the containers. The particles used for the experiment are plastic balls plated
with solder (Sekisui Chemical Co・ラ Micropearl SOL). The dianleter and density ofthe sample
particles are listed in Table 1.
~ -~
Feeder
Side view
Top view
Rol1er
'-.ー-'-ーヤ-.-一一一一一一
Fig.1 A twin Roller systelTI (length: 220 mlTIラdiameter:26 mm )
Table 1 Particles used for the experiment
Particle diameter (μm) 120土10 250土15 290土20 550土20
Particle density (kg/m3) 3700 2900 3200 2900
回 20-
-
Resu1ts and discussion
As particle diameter decreasesヲ particlestend to adhere to the surface of the rollers.
the probability of particles adhering to the rollers Raラ註leangular velocity of the rollers should
be increased. Figure 2 shows the experimental results on the passing probability of particles Rp
To reduce
mmmm
ususu'ua
ハU
ハU
ハU
ハU
岡、JO
ノ問、J
ウム
52211
一一一一一一一一
P
P
A
P
A
P
D
D
D
D
O
ム
目
。
θ= 10.00
0.5
(E)JN
れ
hz-芯MU
心0・Mm
同∞sm∞M
W仏
(= 1-Ra).
O O 15 ハU11
5
Angular velocity,ω(rad/s)
Passing probability of particles without adhering to the rollers
The perfonnance of the classifier depends on the velocity of particles moving along the gap.
To analyze the velocityラ experimentswere conducted under various conditions. The particles
moved at a constant velocity all along the gap. As shown in Figure 3ラ thevelocity v was
proportional both to the angular velocity ωand to the tangent ofthe angle e, i.e.
Fig.2
、、』/
1i
/,,‘、、νニ kωtanθ
0.12
0.08
0.04
(∞
KM)ヘヘC523ω-己官£一
6 4 2
のtanθ( rad / s )
Velocity of particles
制 21-
Fig.3
-
where k is a constant. Alsoヲ thepartic1e diameter did not a在ectthe velocity v.
Table 2 shows the accuracy of the c1assification. The error of the size c1assification was
within 1μm in diameter and was not a:ffected very much by the incline angle from the horizon
θand the angular velocity ω.
Table 2 Accuracy of the size c1assification
(θ= 5-200,α= 0.0020,ω= 0-14 rad/s).
Mean partic1e diameter (μm)
250
290
550
Standard deviation (μm)
0.3
0.2
0.3
Conc1usions
Size c1assification of spherical partic1es has been studied using a c1assifier with a twin roller
systemラ andthe following conc1usions were drawn.
(i) The rotation of the roller plays an important role in reducing the e:ffect of partic1e
adhesion.
(ii) The partic1e velocity is proportional both to the angular velocity of the rollers and to the
tangent of the incline angle from the horizon.
(iii) The error of the size c1assification is within 1μm in diameter.
N omenc1ature
Dp : mean partic1e diaIneter
ν: velocity of partic1es moving along the gap between two rollers
Ra : probability of partic1es adhering to rollers
Rp : passing probability ofpartic1es (= 1-Ra)
α : angle of a roller to the center line
θ: incline angle 企omthe horizon
ω : angular velocity of rollers
同 22帽
(m)
(m/s)
(-)
(-)
(0)
CO)
(rad/s)
-
REFERENCES
linoyぇK.and Tanakaヲ z.ラ 1997.Air Classificationラ InPowder technology handbookラ 2nded.ラedited by Gotohラ K.ラ Masudaラ H.ラ andHigashitaniヲ K.Marcel Dekker.ラ NewYork, pp. 555-560.
Liuラ J.J.ラ Bergラ H.ラ Wenラ Y.ラ Mulgaonker,S and Bowlbyラ R.and Mawer, A.ラ 1995.Plastic ball
grid array (PBGA) overviewラMαteriαIsChemistry and Physics, 40ラ 236-244.
幽 23-
-
Appendix 2
ANALYSIS OF MOVEMENT OF SPHERICAL PARTICLES IN A TWIN
ROLLER SYSTEM FOR SIZE CLASSIFICATION
Yoichi Mizutaniラ MihoMiyazakiフ ShujiMatsusaka and Hiroaki孔1asuda
Department of Chemical engineeringヲ
Kyoto University, Nishikyo北u,Kyoto 61ふ8510Japan
E-mail: [email protected]
Abstract
The movement of spherical particles in a twin roller system for size classification has been
studied experimentally. The diameter of the particles used is 600μ,m. The classification
system consists of a feederヲ atwin roller unit and containers for collecting particles classified.
The two rollers can be set at a desired angle企omthe horizon. The ro11ers can be rotated at an
arbitrary angular velocity. All the particles that are fed from the feeder move along the gap
between the two rollers. As the gap width increases down,九Tardラ theparticles fall down at a
point where the gap width exceeds the particle diameter and are collected in containers arranged
in a row. The motion of the particles moving along the gap is observed through a high-speed
camera connected with a microscope. The image analysis shows that the particles ro11 down
with small jumpingヲ andthe rotation of the particles depends on the operating condition of the
twin roller system. The particle velocity along the gap varies according to the jumping. The
flight timeヲ normalvelocityラ anddistance can be calculated from the velocity difference of the
particles before and a丘erthe contact with the rollers.
Keywords
Size classificationラ SphericalparticleラTwinro11er systemヲ Motionanalysis
剛 25醐
-
Introduction
In recent yearsラ electronic devices, which are widely used for the inforrnation and
cornrnunication equiprnentラ becornevery srnall owing to the progress of the packaging
technology. BGA: Ball Grid Array (Liu et a1.ラ 1995)ラallowedsignificant size reduction
cornpared to conventional surf注cernount devices such as QFP: Quad Flat Package. For BGAラ
spherical solder particles less than 1 rnrn are used for the jointsラwhichare under of the chipラ and
thus the board area beconles srnaller. If the diarneter of the solder particles is not constantラthe
electric connection rnight resu1t in a failure. The size classification of the solder particles
requires accuracy in a few rnicron levels; howeverラ itis di出cu1tto realize the required accuracy
and efficiency using conventional rnethods such as sieving or air classification (Iinoya and
Tanakaラ 1997). A few fine or coarse particles would be contained in the classified products.
A newly developed rnethod using a twin roller unit enables us to classify spherical particles with
the accuracy within 1μrn. Individual particles rnove along the gap of the rollers. When the
gap width is larger than the particle diarneterラ theparticles fall down and are cornpletely
classified. Since the behavior and the translational velocity of the particles are related to the
accuracy and efficiency for the classificationラ thernovernent of the particles should be clarified.
In the previous paper (Matsusaka et a1.ヲ 2003)ヲitwas shown that the average velocity of the
particles rnoving along the gap is proportional to the angular velocity of the rollers and the
tangent of angle of inclination irrespective of particle diarneter. Alsoラrnicroscopicobservation
showed that the particles are not sirnply rolling along the gap between the rollers but rnoving
with cOlnplicated rnotions.
In the present work, we pay attention to the rotation and translation with t1uctuation of the
particles rnoving in the twin roller systern. In particularヲtheeffect of the rotational direction
and angular velocity of the rollers on the behavior of the particles are studied in detail.
開 26園
-
孔1ethods
The experimental apparatus consists of a feeder, a twin roller unit and containers for collecting
particles classified (YSW, Yutaka Co.). Figure 1 shows the main part ofthe classifier. The two
rollers can be set at a desired angle θfrom the horizon with a small angle αbetween the rollers.
Individual particles that are fed from the feeder move along the gap between the rollers. To
prevent the particles from adhering to the rollersラ therollers must be rotated (弘伊[J~ 13 radJs).
As the gap width increases downwardラ theparticles fall down at a certain point and are collected
in the containers arranged in a row. The particles used for the experiments are bearing ballsラ
which are almost perfect1y spherical (Dp= 600μ.m).
X
①Feeder
②Hopper
③Roller
④High剛 speedcamera
⑤Light
⑥Container
r= 13mm
一一歩l
Figラ 1 A twin roller system
四 27欄
-
The motion of the pa託iclesmoving along the gap was observed through a high-speed camera
(Fastcam開 Max,Photron Co.) connected with a microscope (CXラ HiloxCo.). The images were
recorded at the intervals of 1/8000 s for 0.1 s. The magnification ofthe microscope was 150
times. The movement ofthe particles was analyzed using a software (Dipp Motion 2Dラ Ditect
Co.). A coordinate system was adopted as shown in Figure 1; i.e. the X-axis and Y-axis were
alignedラ respectivelyラ inthe longitudinal and transverse directions and Z.欄axiswas perpendicular
to the two axes (see Figure 1). To analyze the rotation of the particlesラ theorientation was
recalculated by converting the two酬 dimensionalcoordinate to three-dimensional coordinateラ and
bothX幽 axisrotation and Y-axis rotation were investigated under various operating conditions.
Figure 2 illustrates three cases of the rotation of two of the rollersラ i.e.the opposite rotation
(case 1)ラ singlerotation (case 2)ラ andthe same rotation (case 3)ラ wherea clockwise rotation is
defined as positive.
Opposite rotation (case 1) Single rotation (case 2) Same rotation (case 3)
Fig. 2. Rotation oftwo rollers
Operating condition
A1though the gap between rollers widen downward for classificationラtheangle αdoes not affect
the movement of the particles as long as the angle is sufficiently small; thus, we simply set them
in parallel (α 口 00). The gap width between rollers was 590μm that is slightly smaller than the
particle diameter of 600μm. The angle of inclination was 12.50ラ andthe angular velocity of
the rollers were in the rangeωυω2 = O~ 13.5 rad/s.
-28開
-
Results and discussion
Rotation of particles
When the two rollers rotate in opposite directions (case 1)ラ theparticles mainly rotate about the
Y-axis. The X欄 axisrotation isラ alsoラ observedwhen the particles contact with one ofthe rollers.
However.ラ thedirection of the X-axis rotation is changed frequent1y because the two rollers
rotate in opposite directionsラ i.e.the rotational power of the roller is not su百icientlytransmitted
to the particles. This phenomenon is sometimes referred to as jrustration. 羽弓lenthe two
rollers rotate in the same direction (case 3)ラ therotational power is sufficient1y transmitted to the
particlesラ thusthe X-axis rotation becomes dominant. The angular velocity of the X-axis
rotation is proportional to the angular velocity of the rollersラ andthe circumferential velocity of
the particles is equal to that of the rollers. Thereforeラ aslip hardly occurs between the
contacting surfaces. As for single rotation (case 2)ラ theY-axis rotation mainly occurs.
Velocity of partic1es
Figure 3 shows the variation of the particle velocity along the X幽 aXlsラ whichis obtained by the
image analysis. The acceleration and deceleration are repeated periodically. The acceleration
corresponds to the jump of the particle and the gradient is equal to g sinθThe deceleration is
caused by the contact friction with the wall of the rollers. For the single rotation (case 2)ラ
minimum velocities were almost zero. 羽生enthe two rollers rotate in the same direction (case
3)ラthevelocities are extremely smal1. Thereforeラtheparticle velocity for the opposite rotation
is higher.
50
E E
40
b pB o b 3O
白官0 。。d 2 0
10
Contact time vd -d
pu o
'EEEA
凸ト
vv
凸ト
voo a
f-ρしVV
A ~担b
d '::べLg sinθAverage velocity
after contact Flight time
O O 0.01 0.02 0.03 0.04 0.05 0.06 0.0ブ 0.08 0.09 0.1
Time [s]
Fig. 3. Variation of particle velocity along X-axis (case 1ラ θ=12.50)
欄 29-
-
Particle jumping
Figure 4 illustrates the jump of a particle in this system. The particle caught in the gap is
thrown up by the two rollers; after a small flightラ theparticle contacts with the rollers again.
The trajectory ofthe particle is controlled by the initial velocity and the grav託y. If the particles
are not so smallラ thedrag force is negligible. Vx denotes the particle velocity along the X四 aXls
andにisthat along the Z-axis, and L1t is the f1ight time. The subscripts 0 and 1 refer to the
start and the end of the jumpラ respectively. The f1ight time L1t, the particle velocityに0ラ and
flight distance L1x are expressed as
L1t = 1 /"1 (Vx1ーに0)gSlnθ
κ。:-L-(九一死。)2tanθ
、‘,/Il
i--
(2)
時打一ハU
一n
一g
一今fM
B
(3)
h-占曹司
‘、ー‘、
、、、.. 、、
4'
ル、
A
¥
、、』『
』『
,
,
,
,
Fig. 4. Jumping of a pa託iclein the twin roller system
-30 -
-
Figure 5 shows the effect of the angular velocities of the two rollers ω1 and ω2 on the
particle ve10city VxO and Vx1・ Theparticle ve10city varies according to the operating condition.
It is worth noting that the tendency of the variation of に1differs from that of に0・
50 /
40卜ω1 [rad/s]
1・5.2Z30トぶ
ロ 7.9
o 13
20 いbぐ
10
] 30
~X 20
O ハυ
唱
EI -5 0 5
ω'2 [radls] 10
50
40 ω1 [rad/s] ・5.2口 7.9A 10 o 13
10
O 酬 10 -5 0 5
ω12 [rad/s]
ハリ
喧
Ei
Fig. 5 Particle ve10cities before and after contact with the rollers 氏。 andVx1
開 31削
-
Velocity difference
Figure 6 shows velocity difference L1にやVx1-Vxo). F or the single rotation (ω2= 0), L1Vx
becomes larger. F or the same rotation (at the right醐 handside in Fig. 6)ラL1Vx is rather smal1.
To realize high聞 accuracyclassification, it is desirable to keep the velocity difference smallerラ
which can be achieved in ω1=の2・ However,as the particle velocity is smallヲ thetotal
efficiency is low. In additionラ therisk of the企actureof the particles caught in the gap will be
increased. Thereforeラ theoperating condition should be determined taking into account the
accuracy and efficiency. The flight time L1t and the particle velocity にoare proportional to the
velocity difference L1に (seeEqs. (1) and (2)) As a referenc民thescale for these values are also
shown in Figure 6. The value of L1t is as small as several ms, and Vzo is several tens mmJs.
The flight distance and height along Z欄 axiscan also be calculated.
30 0.014 ω1 [rad/s] -j 50
• 5.2 0.012 ロ7.9
0.01 40
0.008 ~ 30旨事司 g
h苅v×10 0.006勺 」幽幽 幽d
20 ~ ~ 0.004
とよ
0.002 10
O
同 10 四 5 O 5 O J 0
10 ω2 [rad/s]
Fig. 6. Velocity difference under various conditions
qL
「コ
-
Conc1usions
The nlovement of spherical particles in a twin ro11er system for size classification has been
studied experiInenta11yラ andthe following conclusions were drawn.
(1) When the two ro11ers rotate in opposite directionsラ theparticles ro11 down with sma11
jUmp1ngラwherethe particle velocity along the gap between the ro11ers is rather high.
(2) 羽市enthe two ro11ers rotate in the same direction, the rotational power is su伍ciently
transmitted and the circumferential velocity of the particles is equal to that of the rollers;
however, the particle velocity along the gap is low.
(3) F or the single rotation, the velocity difference of the particles before and after the contaは
with the ro11ers is larger. As for the sanle rotationラthevelocity difference is sma11.
(4) For a high聞 accuracyclassificationラ thesame rotational direction is desirable because of the
small velocity differenceラ andfor a high e伍ciencyclassification, the opposite rotatIon is
desirable. Thereforeラ theoperating condition should be determined taking into account the
accuracy and efficiency.
N omenc1ature
Dp : particle diameter (m)
VxOラVx1ラVzOラに :Particle velocity component (mJs)
L1Vx velocity difference (=に1-に。) (mJs)
L1t flight time (s)
L1x flight distance (m)
α angle between ro11er axes C) θ angle of inclination from horizon C) 0) 1, 0)2 angular velocity of ro11er (rad/s)
「コ「コ
-
References
IinoyぇK.and Z. Tanaka:“Air Classification, In Powder technology handbookラ 2nded," edited
by K. Gotohラ H.Masuda and K. Higashitaniラ MarcelDekker.ラ NewYorkラ pp.555幽 560(1997)
Liuラ1. 1., H. Bergラ Y.Wen, S. Mulgaonkerヲ R.Bowlby and A. Mawer;“Plastic ball grid array
(PBGA) overviewヘMaterialsChemistry and Physics, 40ラ 236幽 244(1995)
Matsusakaラ S.ラ Kラ Muranishiand Hラ Masuda;“Highaccuracy classification of spherical particles
using a twin roller"ラ Proceedingsof APT 2003ラ Penangラ 347-351(2003)
-34-
-
50 ハVハV11
150
Appendix 3: the others
/ーヘ
¥『〆
α ココ O
θ 口 12.50
入
ハU
F3
ハ
υ
ハリ
RhQロω芯ロー向。hhOK
〆。QωlHω
【己七倍仏
o Dp = 600μmヲRa< 0.1μm d. Dpニ 100μm,Ra= 0.2μm 口Dp= 100 μmラ Ra< 0.1μm
CirCUlnferential speedヲ rω(mln/s)
Fig. A凶 1 Effect of surface roughness of rollers and partic1e diameter on the recovery efficiency of partic1es
帽 35岡
-
Vx1 = VxO + gsinθL1t (1)
Vzo = gcosθ. ~ L1t (2) 2
L1tニ2VハU (3) gcosθ
九ーに。ニ2Vzotanθ (4)
Vzo = ko'ω (5)
Vx1ーに。 =2ko'ωtanθ (6)
Theory of jumping partic1e trajectory
where ko is a constantラ ris the radius of the rollerラ andωis the angular velocity.
-36 -
hE占曹司
‘、ー‘、
、、、.、、
#L
、
A
¥
、句、
h ,
,
,
,
Fig. A-2 Trajectory of jumping particles in the twin roller system