SumoBot Presentation BY: CARL DALY, MICHAEL O’KEEFFE & JAMIE TUTTY.
Upload
lester-parkCategory
view
217download
0
SumoBothttp://lm095sumobot.wordpress.com/
Dónal Carty – 10093796Ian O’Donoghue – 10128697Kieron McCabe – 10096892

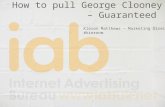
Large tire width and diameter = Greater Traction
Wedge design at front of robot may lift
opponents wheels off surface – reduces
traction.
High centre of gravity – easy to
topple.
Should contact the ground in
multiple points. This gives a
balanced robot.
Wheels at the rear: difficulty with
steering/movement. Keep wheels in a central
position.
SumoBot
Flat tires? Rubber will cover larger surface area –
Traction!

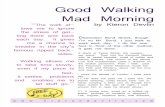
Ultrasonic sensor range:
14 degrees
• We took the cone of vision of our ultrasonic sensors into account. This is a very important aspect of the design as it will decide whether or not we can locate our opponent.
We will position our Ultrasonic Sensor at the front of our robot, inclined at 7 degrees to the vertical plane.
This will give us maximum range to find our opponent.

Design Idea 1- Wedge
Pros:•Instead of just pushing the opponent out of ring it could also flip them over. •Could get partially under the opponent raising it slightly off the ground therefore reducing their traction.•Large tire diameter/thickness: greater traction.
Cons:•Wheels vulnerable to attack from sides.•Problematic steering/movement•Basic

Design Idea 2 - SpiderBot
Pros:•Aesthetically pleasing.•Wedge shaped – lifts opponent, reducing traction•Balanced: Two points of contact with ground (wheels, business end)
Cons:•No attack/defence mechanism•Enclosed PCB – Overheating?

Design 3Pros:•Wedge shaped – lifts opponent, reducing traction•Balanced: Two points of contact with ground (wheels, business end)•Low centre of gravity•Large tire diameter/width = Greater traction.•Very good attack/defence idea – Pneumatic Ram system
Cons:•Enclosed PCB board – over heating•Pneumatics – very heavy•Easily pushed from ring

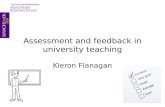
Chosen Design
Ultrasonic Sensors
A simple gear train
Light Sensors
PCB board


Rationale
• Low weight and simple design to optimise speed and power
• 4 wheels = greater traction• Compact design• Low centre of gravity – difficult to topple• Ultrasonic sensors positioned to optimise cone
of vision• PCB open to air – minimises problem of
overheating