
State Estimation - univ-angers.fr
120
Ecole des JD MACS, 20 march 2009 1 State Estimation Probabilistic and Bounded-error approaches Michel Kieffer L2S - CNRS - SUPELEC - Univ Paris-Sud kieff[email protected] Thursday 20 march 2009
Transcript of State Estimation - univ-angers.fr

Ecole des JD MACS, 20 march 2009 1
State EstimationProbabilistic and Bounded-error approaches
Michel Kieffer
L2S - CNRS - SUPELEC - Univ Paris-Sud
Thursday 20 march 2009

Ecole des JD MACS, 20 march 2009 2
1 Introduction
State estimation = generalization of parameter estimation.
State : set of quantity that characterizethe status of a system at a given time instant
(ex : position and speed of a ball).
State estimation=
Estimation of the state from measurements on the system.

Ecole des JD MACS, 20 march 2009 3
State may evolve with time.
A priori information assumed available
– on the way the state evolves (dynamical equation)– on the way measurements are obtained on the system (measurement
equation)
Hypotheses made
– on the measurement noise,– state perturbations
will determine the choice for the tools used for state estimation.

Ecole des JD MACS, 20 march 2009 4
2 Outline
– Discrete-time models– Assumptions– Probabilistic approach– Bounded-error approach
– Joint parameter and state estimation– Continuous-time models
– Assumptions– Bounded-error approach

Ecole des JD MACS, 20 march 2009 5
3 Discrete-time models
Consider a system described by the discrete-time state equation
xk+1 = fk (xk,wk) , k = 0, 1, ..., (1)
where
– fk is a known function (possibly nonlinear and time-varying),– xk is the unknown state vector at time k,
– wk is some unknown state perturbation vector.
Measurements satisfy
y` = h`(x`,v`), ` = 1, ..., k, (2)
where
– h` is a known function (also possibly nonlinear and time-varying),– y` is the measurement vector at time `,– v` is some unknown measurement noise vector.

Ecole des JD MACS, 20 march 2009 6
Depending on the nature of fk and h`
and
on the information assumed available about
the state perturbation and measurement noise
various types of state estimators are available.

Ecole des JD MACS, 20 march 2009 7
4 Probabilistic approach
4.1 Assumptions
– wk, k ∈ N and vk, k ∈ N are i.i.d. sequences with known pdfs,– pdf of x0 based on no measurement is known.
Recursive computation ofp(xk|y1:k),
posterior pdf of xk based on k first measurements, possible at least inprinciple.
Optimal solution of the state estimation problem in a Bayesian sense.

Ecole des JD MACS, 20 march 2009 8
4.2 Recursive algorithm
Alternates
– predictions, prior pdf p(xk|y1:k−1) computed via theChapman-Kolgomorov equation
p (xk|y1:k−1) =∫
p (xk|xk−1) p (xk−1|y1:k−1) dxk−1 (3)
→ involves the state equation
xk+1 = fk (xk,wk) , k = 0, 1, ...,

Ecole des JD MACS, 20 march 2009 9
– corrections, new measurement yk taken into account to update the priorpdf into the posterior pdf p(xk|yk) via Bayes’ rule
p (xk|y1:k) =p (yk|xk) p (xk|y1:k−1)
p (yk|y1:k−1). (4)
→ involves the measurement equation
y` = h`(x`,v`), ` = 1, ..., k,
Usually, (3) and (4) very difficult to evaluate.
Approached solutions have to be derived.

Ecole des JD MACS, 20 march 2009 10
4.3 Linear-Gaussian case
When
– fk and h` are linear,– the pdfs of
– x0,– the state perturbations– the measurement noiseare Gaussian with known mean and covariance matrix
Kalman filter is the optimal solution (Sorenson, 1985).

Ecole des JD MACS, 20 march 2009 11
4.4 Non-linear-Gaussian case
When
– fk and h` are non-linear,– the pdfs of
– x0,– the state perturbations– the measurement noiseare Gaussian with known mean and covariance matrix

Ecole des JD MACS, 20 march 2009 12
Extended Kalman filter (Gelb, 1974; Anderson and Moore, 1979)
→ linearization of the state and measurement equations
→ Gaussian approximation of all pdfs
⊕ Simple implementation
Actual state may get lost
Unscented Kalman filter (Julier and Uhlmann, 2004)
→ linearization of the state and measurement equations
→ approximation of the a priori pdf by some well-selected points
⊕ Simple implementation
⊕ Performs better than the Extended Kalman filter
Actual state may still get lost

Ecole des JD MACS, 20 march 2009 13
Grid-based approach (Terwiesch and Agarwal, 1995; Burgard et al., 1996)
→ discretisation of the state-space using a fixed grid
⊕ Non-linear treatment
⊕ Integrals replaced by discrete sums more easily evaluated
Accuracy depends on the size of the grid
Complexity depends on the size of the grid and dimension of the state
Actual state may still get lost

Ecole des JD MACS, 20 march 2009 14
Particle filtering approach (Gordon et al., 1993; Kitagawa, 1996; Pitt andShephard, 1999; Arulampalam et al., 2002)
→ approximation of the pdfs using clouds of points
⊕ Non-linear treatment
⊕ Integrals replaced by discrete sums more easily evaluated
Accuracy depends on the number of points
Rather complex management of the cloud
Actual state may still get lost

Ecole des JD MACS, 20 march 2009 15
5 Bounded-error approach
5.1 Assumptions
Supports with known shapes are available for wk,vk and x0
– wk ∈ Wk, k ∈ N with known Wk, k ∈ N,– vk ∈ Vk, k ∈ N with known Vk, k ∈ N,– x0 ∈ X0, known.
Recursive computation of the set
Xk|1:k
of all state vectors that are compatible with
– the supports,– the measurements,– the models.

Ecole des JD MACS, 20 march 2009 16
5.2 Recursive algorithm
Alternates
– predictions, set Xk|1:k assumed available, predicted set
Xk+1|1:k = fk(Xk|1:k, Vk
)(5)
→ involves the state equation.– corrections, new measurement yk+1 taken into account to update
Xk+1|1:k, corrected set
Xk+1|1:k+1 =x ∈ Xk+1|1:k : yk+1 ∈ hk+1(Xk+1|1:k, Wk+1)
. (6)
→ involves the measurement equation.

Ecole des JD MACS, 20 march 2009 17
x1
x2
Xk k|1:
xk
y1
y2
Xk k+1|1: +1
Xk k+1|1:
y , Wk k+1 +1
hk+1
fkxk+1
When the hypotheses about the support are not violated⇓
Guaranteed state estimator(no compatible state vector may get lost)

Ecole des JD MACS, 20 march 2009 18
BUT
Implementation very difficult in general
⇓
Approximate characterization of Xk|1:k usingboxes, ellipsoids...
Algorithms still guaranteed, provided thatapproximation Xk|1:k of Xk|1:k satisfies
Xk|1:k ⊂ Xk|1:k, k = 1, . . .

Ecole des JD MACS, 20 march 2009 19
5.3 Linear case
When
– fk and h` are linear,– state perturbation and measurement noise are
– additive,– with elliposidal support
Ellipsoidal approximation for Xk|1:k,see e.g., (Schweppe, 1968; Bertsekas and Rhodes, 1971; Schweppe, 1973)
and (Durieu et al., 1996; Durieu et al., 2001).
Weaker hypotheses on fk (perturbations) may be considered (Chernouskoand Rokityanskii, 2000; Calafiore and El Ghaoui, 2004; Polyak et al., 2004).
More details in the talk by S. Lesecq.

Ecole des JD MACS, 20 march 2009 20
When
– fk and h` are linear,– state perturbation and measurement noise are
– additive,– with boxes as support
Parallelotopic approximation for Xk|1:k,see e.g., (Chisci et al., 1996).
Exact polytopic descriptionfor Xk|1:k,(Shamma and Tu, 1999).

Ecole des JD MACS, 20 march 2009 21
5.4 Non-linear case
When fk and h` are non-linear, Xk|1:k may be
– non-convex– non-connected.
When
– h` is linear– State perturbation and measurement noise are
– additive,– with boxes as support
Parallelotopic approximation for Xk|1:k,(Shamma and Tu, 1997).

Ecole des JD MACS, 20 march 2009 22
When
– fk and h` are non-linear,– state perturbation and measurement noise are
– with boxes or subpavings as support
Subpaving approximation for Xk|1:k,(Kieffer et al., 1998; Kieffer et al., 2002).

Ecole des JD MACS, 20 march 2009 23
6 Joint parameter and state estimation
Assume that
xk+1 = fk (xk,pk,wk) , k = 0, 1, ..., (7)
andy` = h`(x`,pk,v`), ` = 1, ..., k, (8)
where
– fk and h` are known functions (possibly nonlinear and time-varying),– xk is the unknown state vector at time k,
– pk is some unknown parameter vector– wk and v` are some unknown state perturbation and measurement
vectors.

Ecole des JD MACS, 20 march 2009 24
Joint estimation of xk and pk possibleby defining and extended state vector
xek =
(xT
k ,pTk
)T

Ecole des JD MACS, 20 march 2009 25
Assumptions are required for the variations of pk with time
– constantp′
k = 0
and the following extended state equation may be defined
xek+1 =
fk (xek,wk)
0
k = 0, 1, ...,
– slowly varyingp′
k = wp`
and the following extended state equation may be defined
xek+1 =
fk (xek,wk)
wp`
k = 0, 1, ...,
– ...

Ecole des JD MACS, 20 march 2009 26
7 Continuous-time models
Assume now that the dynamical equation is continuous-time
x′ =dxdt
= f (x (t) ,v (t) , t) , (9)
and that discrete-time measurements are available
y (tk) = h (x (tk) ,w (tk) , tk) . (10)
– Continuous-time extensions of the Kalman filter– Algebraic estimation techniques
Ecole des JD MACS, 20 march 2009 27
7.1 Bounded-error context
When f and h are linear,
Ellipsoidal bounding still possible,see (Schweppe, 1968) and (Bertsekas and Rhodes, 1971).
When f and h are non-linear,
Box approximation,see the interval observer
(Alcaraz-Gonzalez et al., 1999; Gouze et al., 2000; Rapaport andGouze, 2003) and (Moisan et al., 2009)
(Raissi et al., 2004; Meslem et al., 2008)
Subpaving approximation(Jaulin, 2002; Kieffer and Walter, 2005; Kieffer and Walter, 2006).

Ecole des JD MACS, 20 march 2009 28
Most of these techniques requirefor the prediction step,
guaranteed numerical integration of the state equation,see, e.g., (Moore, 1966; Berz and Makino, 1998; Nedialkov and
Jackson, 2001).
Correction step implemented as in the discrete-time case.

Ecole des JD MACS, 20 march 2009 29
References
Alcaraz-Gonzalez, V., A. Genovesi, J. Harmand, A.V. Gonzalez, A. Rapaport and J.P.
Steyer (1999). Robust exponential nonlinear interval observer for a class of lumped
models useful in chemical and biochemical engineering. Application to a wastewater
treatment process. In : Proc. MISC’99 Workshop on Applications of Interval
Analysis to Systems and Control. Girona. pp. 225–235.
Anderson, B.D.O. and J.B. Moore (1979). Optimal Filtering. Prentice-Hall. Englewood
Cliffs.
Arulampalam, M., S. Maskell, N. Gordon and T. Clapp (2002). A tutorial on particle
filters for on-line non-linear/non-gaussian bayesian tracking. IEEE Trans. Signal
Processing 50(2), 174–188.
Bertsekas, D. P. and I. B. Rhodes (1971). Recursive state estimation for a
set-membership description of uncertainty. 16(2), 117–128.
Berz, M. and K. Makino (1998). Verified integration of ODEs and flows using differential
algebraic methods on high-order Taylor models. Reliable Computing 4(4), 361–369.
Burgard, W., D. Fox, D. Hennig and T. Schmidt (1996). Estimating the absolute
position of a mobile robot using position probability grids. In : Proc. Of the
Thirteenth National Conference on Artificial Intelligence. pp. 896–901.

Ecole des JD MACS, 20 march 2009 30
Calafiore, G. and L. El Ghaoui (2004). Ellipsoidal bounds for uncertain linear equations
and dynamical systems. Automatica 40, 773–787.
Chernousko, F. L. and D. Y. Rokityanskii (2000). Ellipsoidal bounds on reachable sets of
dynamical systems with matrices subjected to uncertain perturbations. Journal of
Optimization Theory and Applications 104, 1–19.
Chisci, L., A. Garulli and G. Zappa (1996). Recursive state bounding by parallelotopes.
Automatica 32, 1049–1056.
Durieu, C., B. Polyak and E. Walter (1996). Trace versus determinant in ellipsoidal outer
bounding with application to state estimation. In : Proceedings of the 13th IFAC
World Congress. Vol. I. San Francisco, CA. pp. 43–48.
Durieu, C., E. Walter and B. Polyak (2001). Multi-input multi-output ellipsoidal state
bounding. Journal of Optimization Theory and Applications 111(2), 273–303.
Gelb, A. (1974). Applied Optimal Estimation. MIT Press. Cambridge, MA.
Gordon, N. J., D. J. Salmond and A. F. Smith (1993). Novel approach to
nonlinear/non-gaussian bayesian state estimation. IEE Procedings F
140(2), 107–113.
Gouze, J. L., A. Rapaport and Z. M. Hadj-Sadok (2000). Interval observers for uncertain
biological systems. Journal of Ecological Modelling (133), 45–56.
Jaulin, L. (2002). Nonlinear bounded-error state estimation of continuous-time systems.
Automatica 38, 1079–1082.

Ecole des JD MACS, 20 march 2009 31
Julier, S. J. and J. K. Uhlmann (2004). Unscented filtering and nonlinear estimation.
Proceedings of the IEEE 92(3), 401–422.
Kieffer, M. and E. Walter (2005). Interval analysis for guaranteed nonlinear parameter
and state estimation. Mathematical and Computer Modelling of Dynamic Systems
11(2), 171–181.
Kieffer, M. and E. Walter (2006). Guaranteed nonlinear state estimation for
continuous–time dynamical models from discrete–time measurements. In : Preprints
of the 5th IFAC Symposium on Robust Control Design.
Kieffer, M., L. Jaulin and E. Walter (1998). Guaranteed recursive nonlinear state
estimation using interval analysis. In : Proceedings of the 37th IEEE Conference on
Decision and Control. Tampa, FL. pp. 3966–3971.
Kieffer, M., L. Jaulin and E. Walter (2002). Guaranteed recursive nonlinear state
bounding using interval analysis. International Journal of Adaptive Control and
Signal Processing 6(3), 193–218.
Kitagawa, G. (1996). Monte-Carlo filter and smoother for non-gaussian nonlinear state
space models. Journal of Computational and Graphical Statistics 5(1), 1–25.
Meslem, N., N. Ramdani and Y. Candau (2008). Guaranteed state bounding estimation
for uncertain non linear continuous systems using hybrid automata. In : Proc. IFAC
International Conference on Informatics in Control, Automation Robotics. Funchal,
Madeira.

Ecole des JD MACS, 20 march 2009 32
Moisan, M., O. Bernard and J. L. Gouze (2009). Near optimal interval observers bundle
for uncertain bioreactors. Automatica 1, 291–295.
Moore, R. E. (1966). Interval Analysis. Prentice-Hall. Englewood Cliffs, NJ.
Nedialkov, N. S. and K. R. Jackson (2001). Methods for initial value problems for
ordinary differential equations. In : Perspectives on Enclosure Methods (U. Kulisch,
R. Lohner and A. Facius, Eds.). Springer-Verlag. Vienna. pp. 219–264.
Pitt, M. and N. Shephard (1999). Filtering via simulation : Auxiliary particle filters.
Journal of the American Statistical Association 94(446), 590–599.
Polyak, B.T., S.A. Nazin, C. Durieu and E. Walter (2004). Ellipsoidal parameter or state
estimation under model uncertainty. Automatica 40(7), 1171–1179.
Raissi, T, N. Ramdani and Y. Candau (2004). Set membership state and parameter
estimation for systems described by nonlinear differential equations. Automatica
40(10), 1771–1777.
Rapaport, A. and J.-L. Gouze (2003). Parallelotopic and practical observers for nonlinear
uncertain systems. Int. Journal of Control 76, 237–251.
Schweppe, F. C. (1968). Recursive state estimation : unknown but bounded errors and
system inputs. 13(1), 22–28.
Schweppe, F. C. (1973). Uncertain Dynamic Systems. Prentice-Hall. Englewood Cliffs,
NJ.

Ecole des JD MACS, 20 march 2009 33
Shamma, J. S. and K.-Y. Tu (1997). Approximate set-valued observers for nonlinear
systems. 42(5), 648–658.
Shamma, J.S. and K.Y. Tu (1999). Set-valued observers and optimal disturbance
rejection. IEEE Transactions on Automatic Control 44(2), 253–264.
Sorenson, H. (1985). Kalman Filtering : Theory and Application. IEEE Press. New-York.
Terwiesch, P. and M. Agarwal (1995). A discretized non-linear state estimator for batch
processes.. Computers and Chemical Engineering 19, 155–169.

Ecole des JD MACS, 20 march 2009 1
Bounded-error State Estimation
Interval approach
—
Michel Kieffer
March 18, 2009

Ecole des JD MACS, 20 march 2009 2
Content
• Bounded-error state estimation using interval analysis
– Discrete-time
– Continuous-time

Ecole des JD MACS, 20 march 2009 3
1 Discrete-time state estimation
1.1 Introduction
System
Model
u
ym
yDiscrete-time state equation :
xk+1 = fk (xk,wk,uk) .
Observation equation :
yk = hk (xk) + vk,
k = 1, . . . , N.
Problem :
Evaluate state xk using all available information.

Ecole des JD MACS, 20 march 2009 4
1.2 Recursive nonlinear state estimation in a
bounded-error context
Hypotheses :
• at k = 0, x0 ∈ [x0] ,
• wk ∈ [wk,wk] , known for all past k,
• vk ∈ [vk,vk] , known for all past k,
• uk, known for all past k.
Problem :
Characterize set Xk|k of all xk compatible with hypotheses.

Ecole des JD MACS, 20 march 2009 5
1.3 Idealized recursive state estimation
x1( )k
x2( )k
Xk k- -1| 1
xk-1

Ecole des JD MACS, 20 march 2009 6
Idealized recursive state estimation
x1( )k
x2( )k
Xk k- -1| 1
xk-1
Xk k| 1-
fk
xk

Ecole des JD MACS, 20 march 2009 7
Idealized recursive state estimation
x1( )k
x2( )k
Xk k- -1| 1
xk-1
y1( )k
y k2( )
Xk k| 1-
Yk
fk
xk

Ecole des JD MACS, 20 march 2009 8
Idealized recursive state estimation
x1( )k
x2( )k
Xk k- -1| 1
xk-1
y1( )k
y k2( )
XO
kXk k| 1-
Yk
h
fk
xk

Ecole des JD MACS, 20 march 2009 9
Idealized recursive state estimation
x1( )k
x2( )k
Xk k- -1| 1
xk-1
y1( )k
y k2( )
XO
kXk k| 1-
Yk
h
fk
xk
Xk k|
Prediction and correction steps alternate

Ecole des JD MACS, 20 march 2009 10
1.4 Correction step
Set-inversion problem :
Find
XOk+1|k+1 = h−1
k+1 (yk+1 − [vk+1]) .
Solution provided by Sivia.
(similar to parameter estimation
problem with one measurement)

Ecole des JD MACS, 20 march 2009 11
1.5 Prediction step
With discrete-time state equation
xk+1 = fk (xk,wk,uk) .
=⇒ ImageSp
[f ](.)
(a) initial subpaving (b) minced subpaving
(c) image boxes (d) image subpaving

Ecole des JD MACS, 20 march 2009 12
1.6 Simple example: bouncing ball
Ball bouncing on floor, mass m, radius r
Statex = (x, x)T
Sampling period T = 0.1 s
No friction, rigid ball
Observation:
yk+1 = (1 0)xk + [−0.2, 0.2]
Prediction:
xk+1 = fk (xk)
obtained by exact discretisation.
x m
r
x
.
Nonlinear equations due to thebounce
x −→ −x

Ecole des JD MACS, 20 march 2009 13
Actual initial state (unknown)
x0 = 5.2 m,0 m.s−1
Initial search box
[x0] = [3, 6] × [−3, 3]

Ecole des JD MACS, 20 march 2009 14
k = 1, prediction

Ecole des JD MACS, 20 march 2009 15
k = 1, correction

Ecole des JD MACS, 20 march 2009 16
k = 1 . . . 20,
Takes 0.2 s on a AMD K6 at 1.5GHz

Ecole des JD MACS, 20 march 2009 17
2 Continuous-time state estimation
2.1 Introduction
System
Model
u
ym
yContinuous-time state equation :
x′ =dx
dt= f (x,w,u) .
Observation equation :
y (ti) = h (x (ti)) + v (ti) ,
i = 1, . . . , N.
Problem :
Evaluate state x using all available information.

Ecole des JD MACS, 20 march 2009 18
2.2 Recursive nonlinear state estimation in a
bounded-error context
Hypotheses :
• at t0, x (t0) ∈ [x0] ,
• w (t) ∈ [w (t) ,w (t)] , known for all past t,
• v (ti) ∈ [v (ti) ,v (ti)] , known for all past ti,
• u (t) , known for all past t.
Problem :
Characterize set X (t) of all x (t) compatible with hypotheses.

Ecole des JD MACS, 20 march 2009 19
Previous results
• (Kieffer et al, CDC, 98) :
– discrete-time,
– set description with subpavings.
• (Gouze et al, J. Ecol. Mod., 00) :
– continuous-time,
– uncertain state equation,
– cooperative uncertain state equation bounded between cooperative systems,
– set description with boxes.
• (Jaulin, Automatica, 02) :
– continuous-time,
– no state perturbations,
– guaranteed numerical integration of non-punctual boxes,
– set description with subpavings.
• (Raissi et al., Automatica, 04)
– continuous-time,
– no state perturbations,
– improved guaranteed numerical integration of non-punctual boxes,
– set description with boxes.

Ecole des JD MACS, 20 march 2009 20
Present context
• continuous-time,
• state perturbations,
• uncertain state equations bounded between point dynamical systems,
• set description with subpavings,

Ecole des JD MACS, 20 march 2009 21
2.3 Idealized recursive state estimation
x1( )t
x2( )t
X( )ti
x( )ti

Ecole des JD MACS, 20 march 2009 22
Idealized recursive state estimation
x1( )t
x2( )t
X( )ti
x( )ti
X+( )t
i+1
Á
x( )ti+1

Ecole des JD MACS, 20 march 2009 23
Idealized recursive state estimation
x1( )t
x2( )t
X( )ti
x( )ti
y1( )ti+1
y t2 +1( )i
X+( )ti+1
Y( )ti+1
Á
x( )ti+1

Ecole des JD MACS, 20 march 2009 24
Idealized recursive state estimation
x1( )t
x2( )t
X( )ti
x( )ti
y1( )ti+1
y t2 +1( )i
XO( )ti+1
X+( )ti+1
Y( )ti+1
h
Á
x( )ti+1

Ecole des JD MACS, 20 march 2009 25
Idealized recursive state estimation
x1( )t
x2( )t
X( )ti
x( )ti
y1( )ti+1
y t2 +1( )i
X( )ti+1
XO( )ti+1
X+( )ti+1
Y( )ti+1
h
Á
x( )ti+1
Prediction and correction steps alternate

Ecole des JD MACS, 20 march 2009 26
2.4 Correction step
Set-inversion problem :
Find
XO (ti) = h−1 (y (ti) − [v (ti)]) .
Solution provided by Sivia.
(similar to the discrete-time case)

Ecole des JD MACS, 20 march 2009 27
2.5 Prediction step
©
Flow φ difficult to obtain in general.

Ecole des JD MACS, 20 march 2009 28
Situation much simpler with discrete-time state equation
x (k + 1) = fk (xk,w,uk) .
=⇒ ImageSp
[f ](.)
(a) initial subpaving (b) minced subpaving
(c) image boxes (d) image subpaving

Ecole des JD MACS, 20 march 2009 29
Guaranteed numerical integration of continuous-time state equation
x′ =dx
dt= f (x,w,u)
combined with ImageSp.
x1(0) x t1( )
x t2( )x2(0)
[x(0)]
When state equation/initial conditions not well known=⇒ no accurate box enclosures

Ecole des JD MACS, 20 march 2009 30
Enclosure of state equation between two cooperative systems+
Guaranteed numerical integration of the cooperative systems
x1(0) x t1( )
x t2( )
x2(0)
[x(0)][x( )]t
Guaranteed version of Gouze’s interval observer
Accurate box enclosure

Ecole des JD MACS, 20 march 2009 31
Enclosure of uncertain state equation between punctual dynamical systems+
Guaranteed numerical integration of the punctual systems+
ImageSp
x1(0) x t1( )
x t2( )x2(0)
[x( )]t
©
[x ] [p ]00 £
(x ,p*
00* )
p

Ecole des JD MACS, 20 march 2009 32
2.6 Bounding the uncertain state equations
Using a reformulation of Muller’s theorems (Muller,1926).
Theorem 1 (Existence) Assume that the function f (x,p,w, t) is continuous on a
domain
T :
a 6 t 6 b
ω (t) 6 x 6 Ω (t)
p0
6 p 6 p0
w 6 w (t) 6 w
where ωi (t) and Ωi (t) , i = 1 . . . nx, are continuous on [a, b] and such that
1. ω (a) = x0 and Ω (a) = x0,
2. for i = 1 . . . nx,
D±ωi (t) 6 minTi(t)
fi (x,p,w, t) and D±Ωi (t) > maxTi(t)
fi (x,p,w, t) ,

Ecole des JD MACS, 20 march 2009 33
where Ti (t) and Ti (t) are subsets of T defined by
Ti (t) :
t = t,
xi = ωi (t) ,
ωj (t) 6 xj 6 Ωj (t) , j 6= i,
p0
6 p 6 p0,
w 6 w (t) 6 w,
Ti (t) :
t = t,
xi = Ωi (t) ,
ωj (t) 6 xj 6 Ωj (t) , j 6= i,
p0
6 p 6 p0,
w 6 w (t) 6 w.
Then, for any x (0) ∈ [x0,x0], p ∈[
p0,p0
]
and w (t) a solution to the dynamical
system exists, which remains in
E :
a 6 t 6 b
ω (t) 6 x 6 Ω (t)
and equals x (0) at t = 0. ♦

Ecole des JD MACS, 20 march 2009 34
Theorem 2 (Uniqueness) Moreover, if for any p ∈[
p0,p0
]
and w (t)
satisfying w 6 w (t) 6 w at any t ∈ [a, b] ,
f (x,p,w, t) is Lipschitz with respect to x over D,
then for any given x (0) , p and w (t), this solution is unique. ♦

Ecole des JD MACS, 20 march 2009 35
Specific version when f (x,p,w, t) satisfies condition close to cooperativity.
Theorem 3 (cooperative) Assume that the function f (x,p,w, t) is continuous on a
domain T′ that is the same as T in Theorem 1 where ωi (t) and Ωi (t) are continuous
over [a, b] for i = 1 . . . nx and such that
1. ω (a) = x0 and Ω (a) = x0,
2. for i = 1 . . . nx,
D±ωi (t) 6 minT′
i(t)
fi (x,p,v, t) and D±Ωi (t) > maxT′
i(t)fi (x,p,v, t) ,
where T′i (t) and T
′i (t) are subsets of T defined by
T′i (t) = ω (t) ×
[
p0,p0
]
× [w,w] × t
T′i (t) = Ω (t) ×
[
p0,p0
]
× [w,w] × t .

Ecole des JD MACS, 20 march 2009 36
Assume that, if for all t ∈ [a, b] and (x,y) ∈ [ω (t) ,Ω (t)]×2,
xi 6 yi, i = 1 . . . nx , i 6= j
⇓
fj (x,p,w, t) 6 fj (y,p,w, t) , j = 1 . . . nx
for all p ∈[
p0,p0
]
, w ∈ [w,w].
Then, for any x (0) ∈ [x0,x0], p ∈[
p0,p0
]
and w (t), the solution of the dynamical
system exists and remains in E and equals x (0) at t = 0.The uniqueness conditions are the same as in Theorem 1. ♦

Ecole des JD MACS, 20 march 2009 37
Inclusion function for φ (t):
[φ] (t) = [ω (t) ,Ω (t)] .

Ecole des JD MACS, 20 march 2009 38
2.7 Obtaining ω (t) and Ω (t)
• No cooperativity conditions.Build a system
x′ = g1(x,x,p
0,p0,w (t) ,w (t) , t), x (0) = x0,
x′ = g1(x,x,p0,p0,w (t) ,w (t) , t), x (0) = x0,
the solution(
ωT1 (t) ,ΩT
1 (t))T
of which satisfies the requirements ofTheorem 1.

Ecole des JD MACS, 20 march 2009 39
• Cooperativity conditions.Build two systems
x′ = g2
(
x,p0,p0,w (t) ,w (t) , t
)
, x (0) = x0
x′ = g2
(
x,p0,p0,w (t) ,w (t) , t
)
, x (0) = x0
such that for all t ∈ [a, b], x ∈ D, p ∈[
p0,p0
]
and w ∈ [w (t) ,w (t)]
one has
g2
(
x,p0,p0,w (t) ,w (t) , t
)
6 f (x,p,w, t) (1)
and
g2
(
x,p0,p0,w (t) ,w (t) , t
)
> f (x,p,w, t) . (2)
Then the solutions ω2 (t) and Ω2 (t) of these two EDOs satisfy theconditions required by Theorem 3.

Ecole des JD MACS, 20 march 2009 40
Example 1 When state equation can be written as
x′ = f0 (x,p,t) + w (t)
and when the components f0,i (x,p,t) , i = 1 . . . nx of f0 (x,p,t) are monotonic with
respect to x, p and v, except to xi, the functions g1, g1, g
2and g2 are easy to define.
For example, to build g1,i
, in the formal expression of f0,i (x,p,t) , replace
1. xi by xi,
2. for j 6= i, xj by xj if∂f0,i
∂xj6 0 and by xj if
∂f0,i
∂xj> 0 for all t ∈ [a, b] , x ∈ D and
p ∈ [p0,p0],
3. for k = 1 . . . np, pk by pk if∂f0,i
∂pk6 0 for all t ∈ [a, b] , x ∈ D and p ∈ [p
0,p0] and
by pk
if∂f0,i
∂pk> 0 for all t ∈ [a, b] , x ∈ D and p ∈ [p
0,p0].
At last, add wi (t) to the obtained expression. A similar construction of g1,i may be
performed, but with reversed monotonicity conditions.

Ecole des JD MACS, 20 march 2009 41
2.8 Examples
1
k01
k21
k12
2
u
Figure 1: Two-compartment model
Parameters k12 and k21 constant.Parameter k01 depends nonlinearlyof the quantity of material presentin first compartment
k01 =p1
p2 + x1
.
Then
p = (p1, p2, k12, k21)T
.
Quantities of material in both compartments evolve according to
x′ =
−p4x1 −p1x1
1 + p2x1
+ p3x2 + u
p4x1 − p3x2
(3)

Ecole des JD MACS, 20 march 2009 42
Initial state vector x0 = (1, 0) , assumed to be known.
For all t > 0, u (t) = 0.
No state perturbation is considered.
p is only assumed to belong to
[p0] = [0.9, 1.1] × [1.1, 1.3] × [0.45, 0.55] × [0.2, 0.3] .
Only content of second compartment is measured,
ym (tk) = x2 (tk) + v (tk) .
The evolution of the state of (3) is studied for t ∈ [0, 10].

Ecole des JD MACS, 20 march 2009 43
2.8.1 Using only prediction
State equation is cooperative:
Lower dynamical system
x′ = g
c
(
x,p0,p0, t
)
, x (0) = x0 (4)
with
gc(·) =
−p4x1 −p1x1
1 + p2x1
+ p3x2 + u
p4x1 − p3x2
Upper dynamical system
x′ = gc
(
x,p0,p0, t
)
, x (0) = x0 (5)
with
gc (·) =
−p4x1 −
p1x1
1 + p2x1+ p3x2 + u
p4x1 − p3x2
With x0 = x0 = x0, Muller’s theorem is satisfied.

Ecole des JD MACS, 20 march 2009 44
0 5 100
0.5
1
t
0 5 100
0.5
1
t
t t
x1
x2
Figure 2: Evolution of the state estimate using prediction only: direct nu-merical integration (dotted lines) and using cooperativity or its variant ofTheorem 3 (bold lines)

Ecole des JD MACS, 20 march 2009 45
2.8.2 Taking measurements into account
Measurements are now available.
Data taken every 2 s, corrupted by an additive noise in [−0.05, 0.05].
[vk] = [−0.05, 0.05].
Table 1: Noisy data used for state estimation
tk 2 4 6 8 10
y (tk) 0.323 0.278 0.145 0.186 0.079
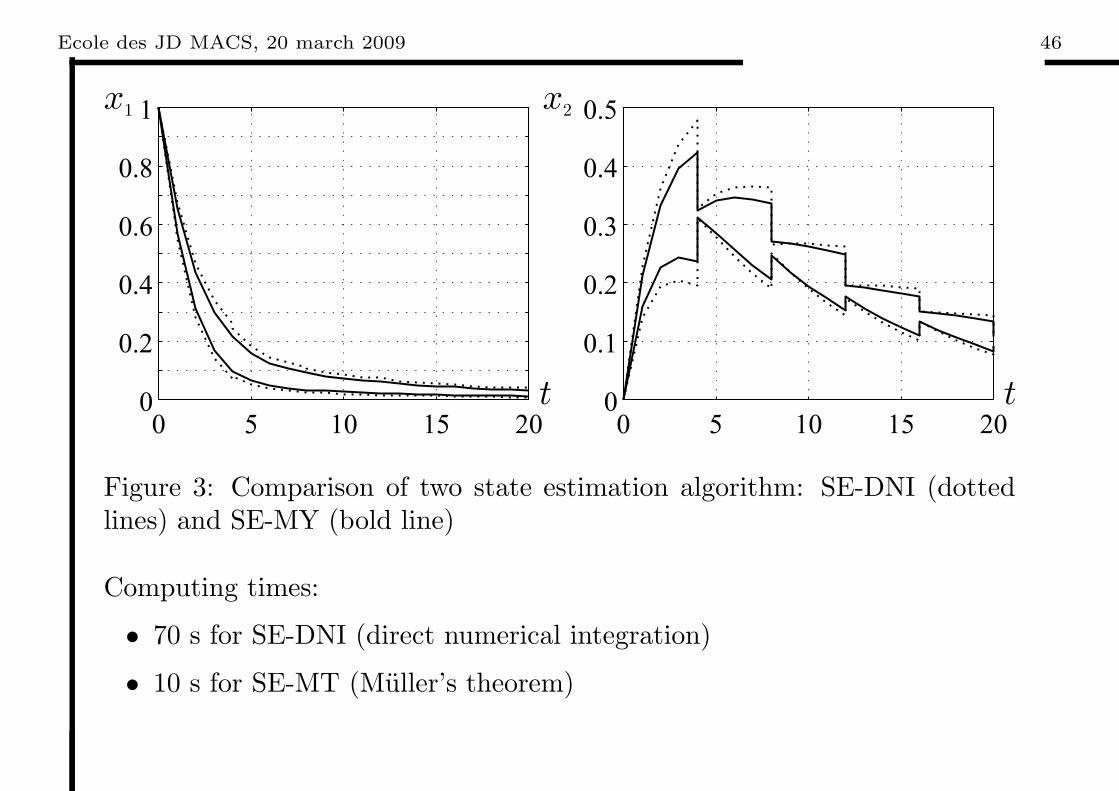
Ecole des JD MACS, 20 march 2009 46
0 5 10 15 200
0.2
0.4
0.6
0.8
1
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
t t
x1
x2
Figure 3: Comparison of two state estimation algorithm: SE-DNI (dottedlines) and SE-MY (bold line)
Computing times:
• 70 s for SE-DNI (direct numerical integration)
• 10 s for SE-MT (Muller’s theorem)

Ecole des JD MACS, 20 march 2009 47
2.8.3 Joint parameter and state estimation
Now p4 added to the state vector x
xe =(
xT, p4
)T.
Assume p4 constant: extended dynamic
x′e =
−xe3xe1 −p1xe1
1 + p2xe1
+ p3xe2 + u
xe3xe1 − p3xe2
0
(6)
with xTe,0 =
(
xT0 , p
4
)
and xTe,0 =
(
xT0 , p4
)
.
New parameter vector
q = (p1, p2, p3)T∈ ([p1] , [p2] , [p3])
T.

Ecole des JD MACS, 20 march 2009 48
Extended state equation not cooperative:
Coupled pair of dynamical systems
x′e = g
nc
(
xe,xe,q0,q0, t
)
, xe (0) = xe,0,
x′e = gnc
(
xe,xe,q0,q0, t
)
, xe (0) = xe,0,(7)
with
gnc
(·) =
−xe3xe1 −p1xe1
1 + p2xe1
+ p3xe2 + u
xe3xe1 − p3xe2
0
and
gnc (·) =
−xe3xe1 −p1xe1
1 + p2xe1
+ p3xe2 + u
xe3xe1 − p3xe2
0
have solutions satisfying Theorem 1.

Ecole des JD MACS, 20 march 2009 49
Data simulated on the same nominal system as before.
Noise corrupting the measurement in [−0.005, 0.005].
All parameters (except p4) assumed perfectly known.
At t = 0, p4 is only known to belong to [0.1, 0.5].
0 5 10 15 200
0.2
0.4
0.6
0.8
1
0 5 10 15 200
0.1
0.2
0.3
0.4
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
t t
t
xe1
xe2
xe3
Takes 40 s on an Athlon at 1.5 GHz.

Ecole des JD MACS, 20 march 2009 50
2.9 Summary of results
1. Recursive state estimation algorithm for continuous-time systems
2. Enclosure of uncertain dynamical system between two point dynamicalsystems
3. Uncertain parameters or state equations can be considered.
4. Computational complexity compatible with systems of large time constantssuch as those encountered in biology, pharmacokinetics...

Ecole des JD MACS, 20 march 2009 1
Distributed parameter and state estimation
in a network of sensors
Michel Kieffer
L2S - CNRS - SUPELEC - Univ Paris-Sud
March 18, 2009

Ecole des JD MACS, 20 march 2009 2
Wireless sensor networks?
Spatially distributed autonomous devices using sensors connected via awireless network.
Sensors may be for
• pressure
• temperature
• sound
• vibration
• motion
• ...
Initially developped for military applications (battlefield surveillance)Now, many civilian applications
(environment monitoring, home automation, traffic control)
[KM04, Hae06]

Ecole des JD MACS, 20 march 2009 3
Applications suggest of many research topics
• protocols for communication between sensors,
• position and localization,
• data compression and aggregation,
• security,
• ...
Constraints on WSN
• limited computing capabilities,
• limited communication capacity,
• power consumption restricted.

Ecole des JD MACS, 20 march 2009 4
Example: WSN for source tracking
Applications
• mobile phone localization andtracking
• computer localization in anad-hoc network
• co-localisation in a team ofrobots
• speaker localization
• . . .
Source (o) and sensors (x)

Ecole des JD MACS, 20 march 2009 5
Usual methods based on
• Time of arrival→ requires good clock synchronization
• Time difference of arrival→ sensors cannot work independently
• Angle of arrival→ difficult to obtain
• Readings of signal strengh (RSS)→ cheap, but not accurate

Ecole des JD MACS, 20 march 2009 6
Two localization approaches using RSS
• Centralized→ all measurements are processed by a unique processing unit
• Distributed→ measurements are processed by each sensor
Centralized Distributed
Context :
• bounded-error distributed estimation
• interval analysis

Ecole des JD MACS, 20 march 2009 7
Distributed state estimation
Consider a system described by a discrete-time model
xk = fk (xk−1,wk,uk) , (1)
where
• xk state of model at time instant k (sampling period T )
• wk state perturbations, assumed bounded in known [w],
• uk input vector, assumed known.
At k = 0, x0 assumed to belong to a set X0, known.

Ecole des JD MACS, 20 march 2009 8
Assume that each sensor ` = 1 . . . L of a WSN has access to a measurement
y`k = g`
k
(xk,v`
k
), (2)
where
• y`k noisy measurement,
• v`k measurement noise, assumed bounded in known [v],
(1) and (2) are the dynamic and observation equations of the model
Usual measurement equations
g`k
(xk,v`
k
)= h`
k (xk) + v`k
g`k
(xk, v`
k
)= h`
k (xk) .v`k

Ecole des JD MACS, 20 march 2009 9
Back to centralized discrete-time state estimation
When all measurements at time k are available at central processing unit,one gets
xk = fk (xk−1,wk,uk) ,
yk = gk (xk,vk) ,
with yTk =
((y1
k
)T, . . . ,
(yL
k
)T) and vTk =
((v1
k
)T, . . . ,
(vL
k
)T).Standard (centralized) state estimation problem.

Ecole des JD MACS, 20 march 2009 10
Information available at time k
Ik =
X0, [wj ]kj=1 , [vj ]k
j=1 , [yj ]kj=1
.
Centralized bounded-error state estimate at time k:
set Xk|k of all values of xk that are consistent with (1), (2) and Ik.
Idealized algorithm
1. Prediction step
Xk|k−1 =fk (x,w,uk) | x ∈ Xk−1|k−1, w ∈ [w]
2. Correction step
Xk|k =x ∈ Xk|k−1 | yk = gk (x,v) , v ∈ [v]×L
.

Ecole des JD MACS, 20 march 2009 11
Distributed state estimation
Ideally, any sensor ` of the WSN should provide
X`k|k = Xk|k.
Previous work on this topic
• distributed Kalman filtering [Spe79]→ linear models, gaussian noise, instantaneous communications
• application to distributed estimation in power systems [LC05]
• distributed estimation in WSN [RGR06]

Ecole des JD MACS, 20 march 2009 12
Hypotheses
Sensor network is entirely connected (necessary condition to haveX`
k|k = Xk|k)
At time k
• each sensor processes own measurement y`k.
Between time k and k + 1
• each sensor ` broadcasts estimates X`,rk|k
• each sensor ` receives and processes Xs,1k|k, s ∈ C (`) where C (`) set of
indices of sensors connected to `
Process may be repeated (several roundtrips ).
Before k + 1,
• each sensor ` builds an estimate X`k|k.

Ecole des JD MACS, 20 march 2009 13
Proposed idealized algorithm
For sensor `
At time k:
X`k|k−1 =
fk (x,w,uk) | x ∈ X`
k−1|k−1, w ∈ [w]
.
X`,0k|k =
x ∈ X`
k|k−1 | y`k = g`
k (x,v) , v ∈ [v]
.
Between k and k + 1,
for r = 1 to Rmax (number of roundtrips)
X`,rk|k =
⋂s∈C(`)
Xs,,r−1k|k
Just before k + 1X`
k|k = X`,Rmaxk|k .

Ecole des JD MACS, 20 march 2009 14
One may easily prove thatXk|k ⊂ X`
k|k.
Non-trivial conditions to have
Xk|k = X`k|k
are more difficult to obtain. Involve
• network connectivity
• largest distance (in links) between sensors
• ...
Problem studied in [Yok01, BFV+05].

Ecole des JD MACS, 20 march 2009 15
Practical algorithm
Implementation issues:
• Boxes or subpavings used to represent sets,
• Basic interval evaluation or ImageSp [KJW02] for prediction step,
• Interval constraint propagation or Sivia [JW93] for correction step

Ecole des JD MACS, 20 march 2009 16
Application: Static source localization
Known sensor locations
r` ∈ R2, ` = 1 . . . L
Unknown source location
θ = (θ1, θ2) ∈ R2
40 45 50 55 6040
42
44
46
48
50
52
54
56
58
60
Source (o) and sensors (x)

Ecole des JD MACS, 20 march 2009 17
Mean power P (d`) (in dBm) received by `-th sensor described byOkumura-Hata model
P dB (d`) = P0 − 10np logd`
d0, (3)
where
• np is the path-loss exponent (unknown, but constant)
• d` = |r` − θ|.
Received power assumed to remain within some known bounds (here)
PdB (d) ∈[P0 − 10np log
d
d0− e, P0 − 10np log
d
d0+ e
], (4)
where e is assumed known→ bounded-error approach.
Ecole des JD MACS, 20 march 2009 18
Bounded-error parameter estimation
RSS by sensor ` = 1 . . . L
y` = h` (θ, A, np) v`
with
h` (θ, A, np) =A
|r` − θ|np , A = 10P0/10dnp0 , (5)
andv` ∈ [v] =
[10−e/10, 10e/10
].
Constant state vector to be estimated
x = (A,np, θ1, θ2)

Ecole des JD MACS, 20 march 2009 19
Distributed approach: interval constraint propagation
At sensor `,
• y` ∈ [y`], measured
• θ ∈ [θ], obtained from neighbors
• A ∈ [A], obtained from neighbors
• np ∈ [np], obtained from neighbors.
Variables must satisfy constraint provided by RSS model
y` −A
|r` − θ|np = 0. (6)
Interval constraint propagation :reduce the domains for the variables using the constraints

Ecole des JD MACS, 20 march 2009 20
Contracted domains may be written as
[y′`] = [y`] ∩[A]
|r` − [θ]|[np],
[A′] = [A] ∩ [y′`] |r` − [θ]|[np],[
n′p]
= [np] ∩ (log ([A′])− log ([y′`])) / log (|r` − [θ]|) ,[θ′1]
= [θ1] ∩(
r`,1 ±√
([A′] / [y′`])2/[n′
p] − (r`,2 − [θ2])2
),
[θ′2]
= [θ2] ∩(
r`,2 ±√
([A′] / [y′`])2/[n′
p] − (r`,1 − [θ1])2
).
Contracted domains still contains all solutions

Ecole des JD MACS, 20 march 2009 21
Results
Networks of L = 2000 sensors randomly distributed
Field of 100 m×100 m.
Source
• placed at θ∗ = (50 m, 50 m)
• P0 = 20 dBm
• d0 = 1 m
• np = 2 (constant over the field)
Measurement noise such that e = 4 dBm.

Ecole des JD MACS, 20 march 2009 22
Example of measurements
Sensor 68 741 954 · · ·
Measurement [9.303, 58.698] [17.856, 112.664] [18.644, 117.640] · · ·
Initial search box (Unknown source amplitude)
[θ]× [A]× [np] = [0, 100]× [0, 100]× [50, 250]× [2, 4]
Initial search box (Known source amplitude)
[θ]× [A]× [np] = [0, 100]× [0, 100]× [100, 100]× [2, 4]

Ecole des JD MACS, 20 march 2009 23
40 45 50 55 6040
42
44
46
48
50
52
54
56
58
60
40 45 50 55 6040
42
44
46
48
50
52
54
56
58
60
Unknown source amplitude Known source amplitude
µ1
µ2
µ1
µ2
Projection of the solution on the (θ1, θ2)-plane

Ecole des JD MACS, 20 march 2009 24
Unknown source amplitude Known source amplitude
µ1 µ1
µ2µ2
Zoom on the solution

Ecole des JD MACS, 20 march 2009 25
Results – continued
0 1 2 30
5
10
15
20
25
Closest point approach
0 1 2 30
20
40
60
80
Distributed
0 1 2 30
20
40
60
80
Centralized
0 1 2 30
5
10
15
20
25
Closest point approach
0 1 2 30
10
20
30
40
50
Distributed
0 1 2 30
10
20
30
40
50
Centralized
Unknown source amplitude Known source amplitude
Histograms of estimation error for θ (100 realizations of sensor field)

Ecole des JD MACS, 20 march 2009 26
Application: Source tracking
Assume now that the source is moving. A and np assumed to be known.
New state vector
xk = (θ1,k, θ2,k, φ1,k, φ2,k, θ1,k−1, θ2,k−1, φ1,k−1, φ2,k−1)T
This long state vector allows to estimate(φ1,k, φ2,k
).

Ecole des JD MACS, 20 march 2009 27
State vector evolves according to
θ1,k
θ2,k
φ1,k
φ2,k
θ1,k−1
θ2,k−1
φ1,k−1
φ2,k−1
=
I4 04
I4 04
θ1,k−1
θ2,k−1
φ1,k−1
φ2,k−1
θ1,k−2
θ2,k−2
φ1,k−2
φ2,k−2
+ T.
φ1,k−1
φ2,k−1
w1
w2
0
0
0
0
,
with w1 ∈ [w] and w2 ∈ [w].

Ecole des JD MACS, 20 march 2009 28
Contracted domains
[y′`,k
]= [y`,k] ∩ A
|r` − [θk]|[np],
[θ′1,k
]= [θ1,k] ∩
(r`,1 ±
√(A/[y′`,k
])2/np
− (r`,2 − [θ2,k])2)
,
[θ′2,k
]= [θ2,k] ∩
(r`,2 ±
√(A/[y′`,k
])2/np
− (r`,1 − [θ1,k])2)
.
[φ′1,k
]=[φ1,k
]∩
([θ′1,k
]−[θ′1,k
]T
+ T [w]
)[φ′2,k
]=[φ2,k
]∩
([θ′2,k
]−[θ′2,k
]T
+ T [w]
)

Ecole des JD MACS, 20 march 2009 29
Results
Field of 50 m×50 m (origin at center)
Networks of L = 25 sensors (communication range of 15 m)
Source
• placed at θ∗ = (5 m, 5 m)
• P0 = 20 dBm
• d0 = 1 m
• np = 2 (constant over the field)
• [w] = [−0.5, 0.5] m.s−2
• T = 0.5 s
Measurement noise such that e = 4 dBm.

Ecole des JD MACS, 20 march 2009 30
-25 -20 -15 -10 -5 0 5 10 15 20 25
-25
-20
-15
-10
-5
0
5
10
15
20
25
Evolution of the source in the WSN

Ecole des JD MACS, 20 march 2009 31
Localization error and width of the box [θ1,k]× [θ2,k]
First iteration
Convergence quite fast

Ecole des JD MACS, 20 march 2009 32
Localization error and width of the box [θ1,k]× [θ2,k]
Third iteration
Convergence quite fast

Ecole des JD MACS, 20 march 2009 33
Conclusions
• Distributed source localization
• Estimation in a bounded-error context→ guaranteed results (provided hypotheses satisfied)
Further work
• Large space for improvements (compute subpavings and send boxes)
• Robustness to outliers in a distributed context
• Sensor colocalisation (team of robots)
• ...
Work partly supported by NoE NEWCOM++

Ecole des JD MACS, 20 march 2009 34
Overview of the components of the Embedded Sensor Board (ESB)from the FU-Berlin (picture from [Hae06]).

Ecole des JD MACS, 20 march 2009 35
References
[BFV+05] R. Bejar, C. Fernandez, M. Valls, C. Domshlak, C. Gomes,B. Selman, and B. Krishnamachari. Sensor networks anddistributed CSP: Communication, computation and complexity.Artificial Intelligence Journal, 161(1-2):117–148, 2005.
[Hae06] T. Haenselmann. Sensornetworks. GFDL Wireless SensorNetwork textbook. 2006.http://www.informatik.uni-mannheim.de/haensel/sn book.
[JW93] L. Jaulin and E. Walter. Set inversion via interval analysis fornonlinear bounded-error estimation. Automatica,29(4):1053–1064, 1993.
[KJW02] M. Kieffer, L. Jaulin, and E. Walter. Guaranteed recursivenonlinear state bounding using interval analysis. InternationalJournal of Adaptive Control and Signal Processing,

Ecole des JD MACS, 20 march 2009 36
6(3):193–218, 2002.
[KM04] R. Kay and F. Mattern. The design space of wireless sensornetworks. IEEE Wireless Communications, 11(6):54–61, 2004.
[LC05] S.-S. Lin and Huay Chang. An efficient algorithm for solvingdistributed state estimator and laboratory implementation. InICPADS ’05: Proceedings of the 11th International Conferenceon Parallel and Distributed Systems (ICPADS’05), pages689–694, Washington, DC, USA, 2005. IEEE Computer Society.
[RGR06] A. Ribeiro, G. B. Giannakis, and S. I. Roumeliotis. SOI-KF:Distributed Kalman filtering with low-cost communicationsusing the sign of innovations. IEEE Trans. Signal Processing,54(12):4782–4795, December 2006.
[Spe79] J. Speyer. Computation and transmission requirements for adecentralized linear-quadratic-gaussian control problem. IEEETrans. Automatic Control, 24(2):266–269, April 1979.

Ecole des JD MACS, 20 march 2009 37
[Yok01] M. Yokoo. Distributed Constraint Satisfaction: Foundations ofCooperation in Multi-Agent Systems. Springer-Verlag, Berlin,2001.


















