Sampling and Reconstruction of Spatial Fields using Mobile … · a time-domain signal, a...
12
arXiv:1211.0135v1 [cs.MM] 1 Nov 2012 1 Sampling and Reconstruction of Spatial Fields using Mobile Sensors Jayakrishnan Unnikrishnan and Martin Vetterli Audiovisual Communications Laboratory, School of Computer and Communication Sciences, Ecole Polytechnique F´ ed´ erale de Lausanne (EPFL), Switzerland Email: {jay.unnikrishnan, martin.vetterli}@epfl.ch Abstract—Spatial sampling is traditionally studied in a static setting where static sensors scattered around space take mea- surements of the spatial field at their locations. In this paper we study the emerging paradigm of sampling and reconstructing spatial fields using sensors that move through space. We show that mobile sensing offers some unique advantages over static sensing in sensing time-invariant bandlimited spatial fields. Since a moving sensor encounters such a spatial field along its path as a time-domain signal, a time-domain anti-aliasing filter can be employed prior to sampling the signal received at the sensor. Such a filtering procedure, when used by a configuration of sensors moving at constant speeds along equispaced parallel lines, leads to a complete suppression of spatial aliasing in the direction of motion of the sensors. We analytically quantify the advantage of using such a sampling scheme over a static sampling scheme by computing the reduction in sampling noise due to the filter. We also analyze the effects of non-uniform sensor speeds on the reconstruction accuracy. Using simulation examples we demonstrate the advantages of mobile sampling over static sampling in practical problems. We extend our analysis to sampling and reconstruction schemes for monitoring time-varying bandlimited fields using mobile sensors. We demonstrate that in some situations we require a lower density of sensors when using a mobile sensing scheme instead of the conventional static sensing scheme. The exact advantage is quantified for a problem of sampling and reconstructing an audio field. I. I NTRODUCTION The typical approach for measuring a spatial field makes use of static sensors distributed over the area of interest [1]. Consequently much of the literature on spatial sampling and reconstruction have focused on such static sensing schemes [2], [3]. An emerging paradigm in spatial sampling is the use of mobile sensors that move through the area of interest, taking measurements along their paths [4], [5]. Mobile sensing schemes have several advantages over static schemes, the chief of which is the fact that a single mobile sensor can be used to take measurements at several distinct positions in space. Such a scheme is often more cost-effective and easier to implement than static sensing since it requires only a single sensor for monitoring a large spatial area. In this paper we illustrate and analyze various unique aspects of mobile sensing and the advantages that they offer. Consider a time-invariant spatial field 1 defined over d- dimensional space represented by a square integrable mapping f : R d → R with f ∈ L 2 (R d ). For any r ∈ R d , the quantity 1 A field that is a function of space alone and does not vary with time. f (r) represents the value of the field at spatial location r. The field could represent, for instance, some spatially varying parameter like the temperature of air or the concentration of a pollutant in the air. Suppose further that the field f is slowly varying in space and can hence be modeled as a spatially bandlimited field. Let ˜ f represent the observed field that is a noisy version of the field of interest expressed as ˜ f (r)= f (r)+ w(r),r ∈ R d (1) where w denotes non-bandlimited spatial noise, which we refer to as environmental noise. The objective in a typical sampling and reconstructing scheme is to use the samples of the observed field ˜ f to obtain a reconstruction ˆ f of the field f such that the mean-square error (MSE) E[‖ ˆ f − f ‖ 2 2 ] in the reconstruction is minimal. If the noise w is absent, then the observed field ˜ f = f is bandlimited in space, and we know from classical sampling theory [6] that we can recover the field exactly from samples of the field taken by static sensors located on a lattice of points in space. However, if w =0 then the observed field ˜ f is not bandlimited and we expect to see some effects of spatial aliasing while sampling the field using static sensors. More importantly, unlike in the case of sampling a time-domain signal, there is no way to implement a spatial anti-aliasing filter in a static sensing setup. This drawback of spatial sensing using static sensors has been observed in various applications (see, e.g., [7], [8], [9]). Sampling using mobile sensors provides us with an ap- proach that partially addresses the issue of spatial aliasing. Mobile sensing allows filtering in time prior to sampling which induces filtering over space in the direction of motion of the sensor. Such spatial filtering is not possible in a static sensing setup. A moving sensor receives as input a time-domain signal representing the field along the path of the sensor given by, ˜ s(t)= ˜ f (r(t)) = f (r(t)) + w(r(t)) (2) where r(t) ∈ R d denotes the position of the sensor at time t. The analog signal ˜ s(t) can be passed through an analog anti- aliasing filter prior to discretizing into samples. Such filtering discards out-of-band noise in the direction of motion of the sensor thus inducing spatial smoothing. Implementing such a filter requires redesigning of the sensing process employed in the sensor and may be feasible only in some scenarios. For the purpose of illustration consider a problem of measuring the concentration of a gas in the air along a straight road, assumed to be constant in time. Assume further that one has a
Transcript of Sampling and Reconstruction of Spatial Fields using Mobile … · a time-domain signal, a...

arX
iv:1
211.
0135
v1 [
cs.M
M]
1 N
ov 2
012
1
Sampling and Reconstruction of Spatial Fieldsusing Mobile SensorsJayakrishnan Unnikrishnan and Martin Vetterli
Audiovisual Communications Laboratory, School of Computer and Communication Sciences,Ecole Polytechnique Federale de Lausanne (EPFL), Switzerland
Email: jay.unnikrishnan, [email protected]
Abstract—Spatial sampling is traditionally studied in a staticsetting where static sensors scattered around space take mea-surements of the spatial field at their locations. In this paperwe study the emerging paradigm of sampling and reconstructingspatial fields using sensors that move through space. We showthat mobile sensing offers some unique advantages over staticsensing in sensing time-invariant bandlimited spatial fields. Sincea moving sensor encounters such a spatial field along its pathasa time-domain signal, a time-domain anti-aliasing filter can beemployed prior to sampling the signal received at the sensor.Such a filtering procedure, when used by a configuration ofsensors moving at constant speeds along equispaced parallellines, leads to a complete suppression of spatial aliasing in thedirection of motion of the sensors. We analytically quantify theadvantage of using such a sampling scheme over a static samplingscheme by computing the reduction in sampling noise due tothe filter. We also analyze the effects of non-uniform sensorspeeds on the reconstruction accuracy. Using simulation exampleswe demonstrate the advantages of mobile sampling over staticsampling in practical problems.
We extend our analysis to sampling and reconstructionschemes for monitoring time-varying bandlimited fields usingmobile sensors. We demonstrate that in some situations werequire a lower density of sensors when using a mobile sensingscheme instead of the conventional static sensing scheme. Theexact advantage is quantified for a problem of sampling andreconstructing an audio field.
I. I NTRODUCTION
The typical approach for measuring a spatial field makesuse of static sensors distributed over the area of interest [1].Consequently much of the literature on spatial sampling andreconstruction have focused on such static sensing schemes[2], [3]. An emerging paradigm in spatial sampling is theuse of mobile sensors that move through the area of interest,taking measurements along their paths [4], [5]. Mobile sensingschemes have several advantages over static schemes, the chiefof which is the fact that a single mobile sensor can be used totake measurements at several distinct positions in space. Sucha scheme is often more cost-effective and easier to implementthan static sensing since it requires only a single sensor formonitoring a large spatial area. In this paper we illustrateand analyze various unique aspects of mobile sensing and theadvantages that they offer.
Consider a time-invariant spatial field1 defined overd-dimensional space represented by a square integrable mappingf : Rd 7→ R with f ∈ L2(Rd). For anyr ∈ R
d, the quantity
1A field that is a function of space alone and does not vary with time.
f(r) represents the value of the field at spatial locationr.The field could represent, for instance, some spatially varyingparameter like the temperature of air or the concentration of apollutant in the air. Suppose further that the fieldf is slowlyvarying in space and can hence be modeled as a spatiallybandlimited field. Letf represent the observed field that is anoisy version of the field of interest expressed as
f(r) = f(r) + w(r), r ∈ Rd (1)
where w denotes non-bandlimited spatial noise, which werefer to as environmental noise. The objective in a typicalsampling and reconstructing scheme is to use the samples ofthe observed fieldf to obtain a reconstructionf of the fieldf such that the mean-square error (MSE)E[‖f − f‖22] in thereconstruction is minimal. If the noisew is absent, then theobserved fieldf = f is bandlimited in space, and we knowfrom classical sampling theory [6] that we can recover thefield exactly from samples of the field taken by static sensorslocated on a lattice of points in space. However, ifw 6= 0 thenthe observed fieldf is not bandlimited and we expect to seesome effects of spatial aliasing while sampling the field usingstatic sensors. More importantly, unlike in the case of samplinga time-domain signal, there is no way to implement a spatialanti-aliasing filter in a static sensing setup. This drawbackof spatial sensing using static sensors has been observed invarious applications (see, e.g., [7], [8], [9]).
Sampling using mobile sensors provides us with an ap-proach that partially addresses the issue of spatial aliasing.Mobile sensing allows filtering in time prior to sampling whichinduces filtering over space in the direction of motion of thesensor. Such spatial filtering is not possible in a static sensingsetup. A moving sensor receives as input a time-domain signalrepresenting the field along the path of the sensor given by,
s(t) = f(r(t)) = f(r(t)) + w(r(t)) (2)
wherer(t) ∈ Rd denotes the position of the sensor at timet.
The analog signals(t) can be passed through an analog anti-aliasing filterprior to discretizing into samples. Such filteringdiscards out-of-band noise in the direction of motion of thesensor thus inducingspatial smoothing. Implementing such afilter requires redesigning of the sensing process employedinthe sensor and may be feasible only in some scenarios. Forthe purpose of illustration consider a problem of measuringthe concentration of a gas in the air along a straight road,assumed to be constant in time. Assume further that one has a

2
sensor that can measure the average concentration of the gasin a chamber. We want to design a scheme that computes thefiltered samples
sn :=
∫ ∞
−∞
s(τ)h(nT − τ)dτ
at timesnT for all n ∈ Z. If we assume thath is a finiteimpulse response filter satisfyingh(t) ≥ 0 for all t andh(t) = 0 for |t| ≥ T
2 , then such a filter can be implementedby designing a system in which a chamber is mounted ona vehicle moving along the road at a constant velocity. Airis pumped into the chamber through an opening whose sizecan be varied dynamically such that the rate of entry of airat time τ is proportional toh(T ⌊ τ
T+ 1
2⌋ − τ) where ⌊x⌋indicates integer component of a real numberx. The chamberis periodically emptied after each sample is measured at times(n+ 1
2 )T for all n ∈ Z. Such a scheme essentially implementsan analog domain sampling prefilter with impulse responsehup to a normalization constant. This scheme can be generalizedto more general non-negative finite impulse responsesh withwider support, if we use multiple chambers.
However, in the proposed approach, a caveat to note isthe peculiar fact that such filtering permits spatial smoothingonly in the direction of motion of the sensor. Hence, forspatial fields of dimensiond > 1, the anti-aliasing filters arethin, i.e., the effective spatial impulse response of the filter issupported on a set of dimension1. Thus this form of spatialsmoothing allows us to discard only one component of theout-of-band noise. For the sake of illustrating the potentialadvantage offered by such a filtering scheme, let us considerthe problem of sampling a field in two-dimensional spacehaving a Fourier transform that is bandlimited only in onedirection as shown in Figure 1(a). Sampling such a fieldusing static sensors will always lead to aliasing because therepetitions in the sampled spectra necessarily overlap. Anexample of the sampled spectrum obtained by static samplingon a lattice of the form(m∆x, n∆y) : m,n ∈ Z is shownin Figure 1(b) where∆y < 2π
ρ. However, we will see later that
such a field can be sampled on the same lattice using sensorsthat move along equispaced straight lines parallel to thex-axisas shown in Figure 2(a) and use ideal anti-aliasing filters inthetime domain. This leads to a complete suppression of aliasingas shown in Figure 1(c). We analyze such a mobile sensingscheme for sampling bandlimited fields later in the paper andquantify advantages obtained in terms of suppressing out-of-band noise.
The scenario is a little different in the case of samplingtime-varying bandlimited fields, represented by functionsofboth time and space of the formf(r, t) where r denotesposition andt time. Here the advantages of mobile sensingare less pronounced since the field values at various pointsin space are also varying in time. Hence it is possible tofilter in time even with static sensors. Furthermore, one hasto account for the Doppler effect while sensing with movingsensors (see e.g., [10, sec 5.2]). Nevertheless we show thatinsome scenarios mobile sensing requires fewer sensors than thenumber of sensors required with static sampling. These resultscould have potential applications in limiting spatial aliasing in
Section Field properties Noise added Noise addedBandlimited Time-varying to the field to samples
II.A II.B,D,F II.C II.E III.A,B
TABLE ISUMMARY OF MODEL ASSUMPTIONS IN DIFFERENT SECTIONS. THE LAST
TWO COLUMNS REPRESENT TWO DIFFERENT ADDITIVE NOISE MODELSTHAT WE CONSIDER- ANALOG SPATIAL NOISE ADDED TO THE FIELD
PRIOR TO SAMPLING, AND DISCRETE NOISE ADDED TO THE FIELD
MEASUREMENTS OBTAINED AFTER SAMPLING.
certain sampling problems, e.g., wave-field synthesis [9].The advantage of mobile sensing over static sensing in
suppressing spatial aliasing has been noted in the context ofaudio source localization in [5] where the authors show thatusing a planar rotating array of microphones, the effectivenumber of measurement points can be increased thus reducingthe amount of spatial aliasing while using the beamformingtechnique. In some other works moving microphones havebeen used for estimating room impulse responses [11] andhead related impulse responses [12]. In these works the desiredresponses are estimated from a finely sampled version of theaudio signal received at the moving microphones. Other workson mobile sensing focus on adaptive path-planning algorithms[4], [13] for environmental monitoring. However, to the best ofour knowledge, this is the first work to illustrate the possibilityof implementing spatial smoothing by using a mobile sensingscheme together with time-domain anti-aliasing filtering,andto quantify the improvements of such a scheme over staticsensing. In earlier work [14], we studied the problem ofdesigning trajectories for mobile sensing which minimize thetotal distance required to be traveled by the sensors per unitarea of the field being sampled.
The paper is organized as follows. We study the samplingof time-invariant fields in Section II and time-varying fieldsin Section III. We discuss sensor trajectories, filter designs,reconstruction schemes, and comparisons with static sensingin various aspects. In order to highlight various advantages ofmobile sensing we have considered several different modelsfor the field and the noise. To enable easy navigation throughthe paper we summarize the model assumptions used in thevarious subsections in Table I. In Section IV we discuss asimulation example comparing mobile and static sampling fora practical problem and conclude in Section V.
II. T IME-INVARIANT FIELDS
Consider a time-invariant field ind-dimensional space rep-resented by a mappingf : Rd 7→ R with f ∈ L2(Rd). Wedefine its Fourier transformF as
F (ω) =
∫
Rd
f(r) exp(−i〈ω, r〉)dr, ω ∈ Rd
where i denotes the imaginary unit, and〈u, v〉 denotes theEuclidean inner product between vectorsu andv. We assumethat the fieldf is bandlimited to a setΩ ⊂ R
d, i.e., supposethat the Fourier transformF of f is supported on a known

3
ωy
ωx
ρ
−ρ
F (ω)=0
(a) Spectrum of field bandlimited toR× [−ρ, ρ].
ωy
ωx
2π∆y
Reconstructionis aliased
(b) Aliased spectrum under static sampling.
ωy
ωx
2π∆y
2π∆x
Unaliasedreconstruction
(c) No aliasing under mobile sampling with fil-tering in thex-direction.
Fig. 1. Sampling a two-dimensional field bandlimited only inone direction. Spectrum under static sampling is aliased but that under mobile sampling is not.
set Ω ⊂ Rd, so thatF (ω) = 0 for ω /∈ Ω. We usef to
denote the observed field, which may either be the fieldfitself or a noisy version of it as shown in (1). In the noisycase, we model the environmental noisew(r) as a zero meanwide sense stationary (WSS) process with unknown powerspectral densitySw. For mathematical regularity, we assumethat the noise power spectral density decays at a faster ratethanO(‖ω‖−d
2 ), i.e., we assume that
Sw(ω) = O(‖ω‖−r2 ) for somer > d. (3)
Time-invariant fields are particularly well-suited for mobilesensing schemes since the field does not vary as the sensormoves around taking measurements in space. We distinguishbetween two distinct scenarios - one-dimensional fields inwhich a single moving sensor can visitall points in the one-dimensional spatial region of interest, and higher-dimensionalfields in which each sensor can measure the field only on aone-dimensional sub-manifold of the spatial region of interest.To illustrate this difference we consider one-dimensionalfieldsand two-dimensional fields with the understanding that theanalysis for two-dimensional fields can be easily generalizedto higher-dimensional fields. In this section, we detail themobile sensing scheme and describe how a time domain anti-aliasing filter can be used to perform spatial smoothing. Wequantify the improvements of such a sensing scheme over thestatic sensing scheme. We initially assume that the sensorsaremoving with constant velocities and later consider the scenariowith non-uniform speeds.
A. Sensor trajectories for mobile sensing
For sampling a field inRd whered ≥ 2, there are severalpossible choices of trajectories that can be used by the movingsensors. In our recent work [14] we studied the problem ofdesigning sensor trajectories that admit perfect reconstructionof bandlimited fields from measurements taken by the sensorsmoving along these trajectories in a noise-free setting. Weintroduced the notion of optimal trajectories that minimize thetotal distance required to be traveled by the moving sensors.For d = 2 we showed that a set of trajectories comprising oneset of equispaced parallel lines is optimal from certain classesof trajectories. In this paper, we will restrict ourselves to sucha collection of trajectories for fields inR2 and assume that we
have one sensor moving along each line taking measurementson its path.
B. Sampling and reconstruction
Consider a sensor moving at a constant velocity throughspace. The positionr(t) of the sensor at timet is given byan affine function of the formr(t) = u + vt whereu, v ∈R
d represent the initial position and velocity of the sensorrespectively. Without loss of generality we assume thatu = 0for simplifying the analysis. In the absence of noise the time-domain signal seen by such a sensor is given by
s0(t) = f(r(t)) = f(u+ vt), t ∈ R.
In this scenario it easily follows (see, e.g., [14, Lemma 2.2])that the signals0(.) is bandlimited to
Ωs0 := 〈v, ω〉 : ω ∈ Ω ⊂ R. (4)
It follows via the Nyquist sampling theorem thats0(.) canbe perfectly recovered by sampling it uniformly at tempo-ral intervals less than or equal to2π/(maxΩs0 −minΩs0).Furthermore, in the presence of noise, the signal received bythe sensor can be passed through an anti-aliasing filter withpassband aligned withΩs0 prior to sampling. This limits thecontribution of out-of-band noise in the samples.
1) One-dimensional field:Supposef(.) denotes a one-dimensional field bandlimited toΩ = [−ρ, ρ]. In this case, if asensor moves along the field at a constant velocityv, the signalit sees in the absence of noise is bandlimited to[−vρ, vρ] aswe argued in (4). Hence, in the presence of noise, the signalcan be filtered prior to sampling. Leth(.) denote the impulseresponse of an ideal filter with passband in the interval[−ρ, ρ]:
h(x) =ρ
πsinc(
ρx
π), x ∈ R (5)
where sinc(x) := sinπxπx
. Then the ideal choice for an anti-aliasing filter while sampling the time-domain signals(t) =f(vt) is given byhaa(t) = vh(vt). Let s(t) denote the signalat the output of the anti-aliasing filter. Suppose the sensortakesmeasurements everyT time units after passing the observedsignal through the filter. Thus we get uniform samples of
s(t) = (s ∗ haa)(t) = (s0 ∗ haa)(t) + (w ∗ haa)(t)

4
where w(t) = w(vt) and ∗ denotes convolution. Sincef isbandlimited we can write
s(t) = f(vt) + (w ∗ h)(vt).
Now, if the sensor takes samples everyT time units, weessentially get uniform noisy samples of the field at intervalsof vT spatial units. We know from classical sampling theory[15] that when noise is absent the fieldf(.) can be exactlyrecovered from these samples provided that the samplinginterval satisfiesT < π
vρ. Furthermore, in the noisy case, out-
of-band noise can be suppressed in the reconstruction of thefield by using sinc interpolation2,
f(x) =∑
j∈Z
vTρ
πs(jT )sinc
(
ρ(x− jvT )
π
)
, x ∈ R (6)
providedT < πvρ
. This interpolation is well-defined when thenoise satisfies (3). However sinc interpolation is sensitive toerrors in the samples and can lead to unbounded errors in theapproximation at some values ofx. This can be avoided byusing alternate kernels in place of the sinc kernel (see, e.g.,[17] and references therein).
2) Two-dimensional field:In the case of a two-dimensionalfield f(.), we consider sensors moving along equispaced par-allel lines through space. For a givenΩ the optimal orientationof these parallel lines can be computed as described in [14].However, to simplify analysis we assume that the sensorsare moving at a constant velocityv along lines parallel tothe x-axis spaced∆y units apart as illustrated in Figure2(a). The position of thej-th sensor at timet is given by(vt, j∆y). Hence thej-th sensor is exposed to the signalsj(t) = f(vt, j∆y). In the absence of noise, we know from (4)that these signals are bandlimited. Hence in the noisy scenariothe signalssj(t) can be filtered and sampled uniformly, justlike in the case of the one-dimensional field as we outlined inSection II-B1. In particular, ifΩ = [−ρ, ρ] × [−ρ, ρ], thenit follows from (4) that the signals0(t) = f(vt, j∆y) isbandlimited to an interval of the form[−ρv, ρv]. Hence, like inSection II-B1, the filterhaa(t) = vh(vt) can be used prior touniform sampling. The frequency response of this ideal time-domain filter is shown in Figure 2(b). Thus, at the output ofthe sampler we obtain uniform samples of
sj(t) = f(vt, j∆y) + (wj ∗ h)(vt)
wherewj(x) = w(x, j∆y) andh is the filter defined in (5).Suppose that the samples are taken at time-intervals ofT <πvρ
units. Let∆x = vT . We further assume that the samplestaken by the sensors are aligned with each other, and hencethe collection of samples from all the sensors lie on a two-dimensional lattice of the form(i∆x, j∆y) : i, j ∈ Z andcan be expressed as
sj(iT ) = f(i∆x, j∆y) + (wj ∗ h)(i∆x), i, j ∈ Z. (7)
2Note that our rationale behind using sinc filters for anti-aliasing andinterpolation is the fact that the only assumption we have about the field isthat it is bandlimited. For a stochastic field model the MSE can be minimizedby using a Wiener filter [16].
ν(r) hs(.)
Λn : n ∈ Z2
µ[n] µs(r)D/C hr(.) ν(r)
Λ
Fig. 3. Sampling and reconstruction setup.
Thus, results from classical sampling theory [6] can be usedto estimate the field from these samples as:
f(x, y) =∑
i,j∈Z
∆x∆yρ2sj(iT )
π2sinc
(
ρ(x − i∆x)
π
)
sinc
(
ρ(y − j∆y)
π
)
(8)
provided∆x,∆y < πρ
. The reconstruction given in (8) is well-defined when the noise satisfies (3) and is exact when noiseis absent.
Using the notationµ[n] = sj(iT ) wheren = (i, j)T , thefiltering and sampling relation of (7) can be written as a two-dimensional convolution as follows:
µ[n] = (f ⋆ hs)(Λn), n ∈ Z2,
where⋆ denotes two-dimensional convolution,
Λ =
(
∆x 00 ∆y
)
,
and hs represents the effective two-dimensional samplingkernel induced by the sampling trajectories of Figure 2(a) andthe filtering operation of Figure 2(b) given by
hs(x, y) =ρ
πsinc
(ρx
π
)
δ(y) (9)
where δ(.) represents the Dirac delta function. This kernelhas the following representation in the Fourier domain asillustrated in Figure 2(c)
Hs(ω) =
1 for 0 ≤ |ωx| ≤ ρ0 else.
(10)
Figure 3 shows the system of sampling and reconstructionwhereν plays the role off andν the role off . In the figure thesamplesµ[n] passes through a discrete to continuous converterto produceµs(r), an impulse stream in the continuous spacegiven by
µs(r) =∑
n∈Z2
µ[n]δ2(r − Λn)
where δ2 represents the Dirac delta function in two dimen-sions. The reconstruction kernelhr(.) is the two-dimensionalsinc-kernel
hr(x, y) =∆x∆yρ
2
π2sinc
(ρx
π
)
sinc(ρy
π
)
.
The kernel has the following representation in the Fourierdomain
Hr(ω) =
∆x∆y for 0 ≤ |ωx|, |ωy| ≤ ρ0 else
(11)

5
x
yv (velocity)
∆y
(a) Equispaced parallel line trajectories.
ωt
Haa(ωt)
vρ−vρ
(b) Frequency response of time domain anti-aliasing filter.
ωy
ωx
Hs(ω) = 0
Hs(ω) = 1
ρ−ρ
(c) Frequency response of the induced sam-pling kernel is supported onω : |ωx| ≤ ρ.
Fig. 2. Sampling a two-dimensional field using mobile sensors: Sensor trajectories, frequency response of time-domainfilter, and the induced samplingkernel.
whereω = (ωx, ωy). In this representation the reconstructedfield of (8) is given by
f(r) =∑
n∈Z2
µ[n]hr(r − Λn), r ∈ R2.
We will use this new representation for simplifying the dis-cussion in the rest of the paper.
C. Comparison with static sampling: Aliasing suppression fornon-bandlimited fields
Before proceeding to discuss bandlimited fields in detail,we now take a slight detour to consider the problem ofsampling a non-bandlimited field in a noise-free setting. Weknow from classical sampling theory that sampling a signalat a rate less than the Nyquist rate leads to aliasing in thereconstructed signal, which is highly undesirable. In practice,while sampling a non-bandlimited signal in the time-domain,one typically employs an anti-aliasing filter to suppress theout-of-band portion of the signal. The ideal choice for the anti-aliasing filter and the reconstruction filter are ideal low-passfilters with cutoff frequencies given by half of the samplingrate. However, for sampling in the spatial domain, it is notpossible to implement a spatial anti-aliasing filter in a staticsensing setup. Nevertheless, in a mobile sampling scheme, anideal time-domain filter can be used to reduce the amount ofaliasing. In the one-dimensional case, as we argued in SectionII-B1, this sampling procedure effectively implements an idealanti-aliasing filter thereby suppressing aliasing completely.Thus the mobile sampling scheme is completely devoid ofaliasing effects even while sampling a non-bandlimited field.Furthermore, the squared error in the reconstruction can befurther reduced by simultaneously increasing the samplingrateand the bandwidth of the anti-aliasing filter.
The scenario is different in the two-dimensional case. Sup-pose we design the sampling scheme for fields bandlimitedto Ω = [−ρ, ρ] × [−ρ, ρ] and suppose that the observednoise-free fieldf = f is in fact bandlimited to the biggerset3 Ω = [−ρ, ρ] × [−ρ, ρ] where ρ > ρ. Such a field isshown in Figure 4(a). In a static sensing scheme this field
3The assumption that the field is bandlimited toΩ is only used to simplifythe illustration. The advantages of filtering persist even when f is notbandlimited.
Ω
Ω
Spectrum of interestOut-of-band energy
(a) Non-bandlimited spectrum.
Ω
Ω
Spectrum of interestOut-of-band energy
(b) Filtered spectrum.
Fig. 4. Spectrum of a non-bandlimited two-dimensional fieldand its filteredversion.
is sampled without filtering and hence the sampled spectrumand reconstructed spectrum are aliased in both theωx andωy
directions as shown in Figures 5(a) and 5(b). In the mobilesampling case, however, we can use the anti-aliasing filterdescribed in Section II-B2. In this case we know from theform of the effective sampling kernel in Figure 2(c) thatthe out-of-band energy in theωx direction is filtered outas shown in Figure 4(b). Hence the sampled spectrum andreconstructed spectrum are aliased only in theωy directionas shown in Figures 5(c) and 5(d) respectively. Although theobtained reconstructionf is not completely devoid of aliasing,the squared error‖f−f‖22 in the reconstruction is significantlylower than the squared error in the reconstruction obtainedvia static sampling which is aliased both in theωx and ωy
directions.Two observations are in order. Firstly, from the discussion
above and Figure 5 it is clear that the scheme of mobilesampling with filtering is effective in suppressing aliasingin the ωx direction even when the field is not bandlimitedin the ωx direction. We discussed such an example in theintroduction. The Fourier transform was supported on a semi-infinite set and the sampled spectrum is completely devoid ofaliasing as illustrated in Figure 1. Such a complete suppressionof aliasing is not possible with static sensing unless the fieldis bandlimited to a compact set inR2. Secondly, it is possibleto improve upon the mobile sampling scheme described hereby employing mobile sampling along more complex samplingtrajectories. For instance, in the example of Figure 4 if we

6
replaced the sensors moving parallel to thex-axis with asimilar set of sensors moving at constant velocities parallelto they-axis then it would be possible to suppress aliasing inthe ωy direction by using ideal anti-aliasing filters as before.Now if we had both kinds of sensors, those moving along thex direction and those moving along they direction, then theprefiltered samples from the former set of sensors are devoidof aliasing in theωx direction and the prefiltered samplesfrom the latter set of sensors are devoid of aliasing in theωy direction. The samples from both these sets of sensors canbe combined to obtain better aliasing suppression than thatobtained in the Figure 5(d). A simple way to do this wouldbe to first obtain two different reconstructions of the field,thefirst using the set of samples from the sensors moving alongthe x direction and the other from the sensors moving alongthe y direction. Now the aliased portions of each of thesereconstructions can be filtered out and the resultant fields canbe averaged to obtain a reconstruction with less aliasing thaneither original reconstruction.
D. Comparison with static sampling: Noise suppression forbandlimited fields in noise
We now study the reduction of out-of-band noise that canbe obtained in the mobile sensing scheme using an anti-aliasing filter while sampling a bandlimited field in WSSnoise satisfying (3). The analysis is straightforward for one-dimensional fields. We provide a more detailed study for thetwo-dimensional case.
1) One-dimensional field:In a scheme of sampling a one-dimensional field using static sensors, one has access only tofield measurements taken on a discrete set of points. Hence itis not possible to completely filter out the out-of-band noise ina static setup. However, if we use a sensor moving at constantvelocityv, it is possible to filter out all the out-of-band noise aswe showed in Section II-B1. We can quantify the advantage bycomparing the noise variance in the reconstruction of (6) withthe noise variance in the reconstruction of a static samplingscheme. Assume that fieldf is bandlimited toΩ = [−ρ, ρ] andis sampled at the Nyquist rate. In the case of static samplingthere is no anti-aliasing filter and hence the noise varianceinthe resulting reconstruction is given by
σ2stat =
1
2π
∫ ρ
−ρ
∑
n∈Z
Sw(ω − 2nρ)dω (12)
whereSw(.) denotes the power spectral density (p.s.d.) of thenoise processw(.). In the mobile sampling case, however, thefield is effectively filtered by an anti-aliasing filter givenby (5)as in Section II-B1 prior to sampling. Since the anti-aliasingfilter prevents aliasing due to out-of-band noise, the totalnoisein the reconstruction of (6) is given by
σ2m =
1
2π
∫ ρ
−ρ
Sw(ω)dω. (13)
Clearly, we see that the contribution from the repetitions of Swthat appear in the static reconstruction of (12) is absent inthevariance of noise in the reconstruction of (13) correspondingto the mobile sampling and filtering scheme of Section II-B1.
Moreover, the contribution from the terms withn 6= 0 in (12)leads to aliasing in the reconstruction which is particularlyundesirable.
2) Two-dimensional field:Consider a two-dimensional spa-tial field f bandlimited toΩ = [−ρ, ρ] × [−ρ, ρ] ⊂ R
2.The static and mobile schemes for sampling the field canbe represented as shown in Figure 3 whereν represents theinput field being sampled,hs denotes the specific choice ofthe sampling kernel andΛ is a2× 2 matrix that generates thespatial sampling lattice. In general,ν is a noisy versionf ofthe fieldf .
We consider a static sampling scheme that uses a rectangularsampling grid at the Nyquist sampling rate i.e.,∆x = ∆y = π
ρ,
and we consider a mobile sampling scheme as in Section II-B2with the spacing∆y between the sensor trajectories equal tothe Nyquist intervalπ
ρ. We consider two extreme choices for
the low-pass filter employed prior to sampling in the mobilesensing scheme - the ideal low-pass filter (LPF) with a sincresponse, and a more practically feasible filter, the box-filterwhose impulse response is a rectangular pulse.
We first characterize the response of the sampling schemesto noise. Suppose the inputν in Figure 3 represents weak-sense stationary noise with power spectral densitySν(ω), ω ∈R
2. Then the p.s.d. ofµ is given by,
Sµ(ejω) =
∑
n∈Z2
Sν(Λ−1(ω − 2πn))|Hs(Λ
−1(ω − 2πn))|2∆x∆y
.
The output signalν is cyclostationary since its autocorrelationfunction is invariant to shifts by2πΛ−1. Its effective p.s.d.can be computed just as one computes the power spectra oflinearly modulated signals (see, e.g., [18, Sec. 3.4-2]) and isgiven by
Sν(ω) =1
∆x∆y
|Hr(ω)|2Sµ(ejΛω). (14)
Below, we separately compute the noise variances in the caseof static and the two cases of mobile sampling.
Static sampling
In the case of static sensing we do not have any spatialfiltering and hence the sampling kernel is an impulse functionhs(x, y) = δ(x)δ(y) and is equivalently given in the Fourierdomain by,
Hs(ω) = 1 for all ω ∈ R2. (15)
Since we assume Nyquist rate sampling we also have∆x =∆y = π
ρ. Substituting (15) in (14) and integrating we obtain
the following expression for the noise varianceσ2stat:
σ2stat =
1
4π2
∫
Ω
∑
n∈Z2
Sν(ω − 2nρ)dω. (16)
Since we are sampling at the Nyquist rate we do not observeany signal distortion in this case.
Mobile sampling with ideal low-pass filter
If the ideal sinc filter is employed as the LPF prior to samplingat the mobile sensors, the effective two-dimensional sampling

7
Ω
Ω
Non-overlapped spectrumOverlapped portions
(a) Sampled spectrum from staticsampling.
Ω
Unaliased portion
Aliased portions(b) Reconstructed spectrum fromstatic sampling.
Ω
Ω
Non-overlapped spectrumOverlapped portions
(c) Sampled spectrum from mobilesampling with filtering.
Ω
Unaliased portionAliased portions
(d) Reconstructed spectrum frommobile sampling with filtering.
Fig. 5. Comparison of aliasing in static and mobile samplingschemes while sampling a two-dimensional field. The reconstructed field is aliased in twodirections for the static scheme while only in one directionfor the mobile scheme.
kernelhs is given by (9) which is equivalently given in theFourier domain by,
Hs(ω) =
1 for 0 ≤ |ωx| ≤ ρ0 else.
(17)
We note that the filterHs is frequency limited in the x-direction. Further, since the spacing between the trajectories isequal to the Nyquist interval∆y = π
ρit follows that as long as
the sampling interval along the trajectories satisfies∆x < πρ
,we have the following expression for the noise varianceσ2
m1:
σ2m1 =
1
4π2
∫
Ω
∑
n∈Z
Sν(ω − (0, 2nρ)T )dω. (18)
Comparing the expressions (16) and (18) we see that in thecase of mobile sampling, only spectral shifts at lattice pointsalong the x-axis contribute to the noise variance whereas inthe case of static sampling spectral shifts from all pointsin the two-dimensional lattice contribute to the noise signalspectrum. The exact value of the reduction in noise varianceobtained with mobile sampling can be computed if the truenoise spectrumSν(.) is known.
Mobile sampling with box filter
We now consider the case of mobile sampling with a boxfilter that is easier to implement. In this case we expect somedistortion in the reconstruction because the filter responseis not flat in the pass-band. The effective two-dimensionalsampling kernel in this case ishs(x, y) = box∆b
(x)δ(y) where
box∆b(x) :=
κ |x| < ∆b
0 else
where2∆b denotes the spatial width of the box-filter response
and κ = (2ρ)12
[
∆2b
π2
∫ ρ
−ρsinc2
(
∆bωπ
)
dω]− 1
2
. The samplingkernel is equivalently given in the Fourier domain by
Hs(ω) =κ∆b
πsinc
∆bωx
π. (19)
The choice ofκ ensures that∫
Ω Hs(ω)2dω = 4ρ2 which is
consistent with the responses in (15) and (17).Since the box filter is a non-ideal LPF, we expect some
distortion in the reconstructed field. As before, let us assume
that ∆x < πρ
and that∆y = πρ
. Let F denote the Fourier
transform of the bandlimited field being sampled andF denotethe Fourier transform of the reconstruction obtained by usingan ideal reconstruction filter of the form (11). We have
F (ω) =κ∆b
πF (ω) sinc(
∆bωx
π), ω ∈ Ω. (20)
Clearly, we see that the reconstructed field is a distortedversion of the original field even in the absence of noise. Theamount of distortion introduced for a givenF can be computedusing relation (20). We can also quantify the varianceσ2
m2 ofthe noise in the reconstruction using relations (19) and (14):
σ2m2 =
κ2∆2b
4π4
∫
Ω
∑
n∈Z2
Sν(ω − (2nxπ
∆x
, 2nyρ)T )
sinc2(∆b
π(ωx − 2πnx
∆x
))dω.
Now if it is inexpensive to increase the sampling rate used byeach moving sensor, we can let∆x → 0, whence we obtain,
σ2m2 =
κ2∆2b
4π4
∫
Ω
∑
n∈Z
Sν(ω − (0, 2nρ)T )sinc2(∆bωx
π)dω.
(21)
If we now also allow ∆b → 0, it is easy to see thatκ∆b
π→ 1. Hence the reconstruction in (20) becomes accurate
and the expression in (21) reduces to that in (18). Thismeans that we havelim∆b→0 F (ω) = F (ω) for ω ∈ Ω,and lim∆b→0 lim∆x→0 σ
2m2 = σ2
m1. This means that if thesensors oversample at high rates along their path and use arectangular LPF with a short impulse response, we can recreatethe performance with an ideal LPF and Nyquist sampling.
We note that if the noise spectral density were white (i.e.Sν(ω) = 1 for all ω ∈ R
2), then the expressions for thevariance in (16), (18) and (21) tend to infinity. This is becauseunfiltered white noise samples have infinite variance. However,in practice environmental noise is never completely white.If the noise spectrum is flat with a bandwidth along eachdimension equal toa times the field bandwidth, then we obtaina reduction in noise variance by a factor ofa when we employmobile sampling in place of static sampling, as shown below.

8
Proposition 2.1:Suppose the noise spectral densitySν(.)takes a value of unity on the set[−aρ, aρ]× [−aρ, aρ] and0elsewhere for someρ > 0. Then the variances in (16) and (18)decay asO(a2) andO(a) respectively. In particular whenais an odd number the variances reduce to
σ2stat =
ρ2a2
π2, and σ2
m1 =ρ2a
π2.
Thus if the noise spectrum is flat with a bandwidth along eachdimension equal toa times the field bandwidth, then we obtaina reduction in noise variance by a factor ofa when we employmobile sampling in place of static sampling.
E. Noise suppression via oversampling on sensor paths
A unique aspect of a mobile sensing scheme is the factthat it is possible to sample at high rates along the paths ofthe mobile sensors. This is a significant advantage over staticsensing, because in static sensing the sampling rate can beincreased only by increasing the number of sensors whichis, in general, more expensive than increase the density ofsamples taken by a moving sensor. Such oversampling helpsin suppressing measurement noise, i.e., noise added to thediscrete measurements after sampling. In the case of samplinga one-dimensional field bandlimited toΩ = [−ρ, ρ], as wediscussed earlier, the Nyquist sampling rate isvρ
πwherev is
the velocity of the sensor. It is known [19, p. 136] that, inthe presence of additive zero-mean white measurement noise,oversampling by a factor ofk relative to the Nyquist rateleads to a reduction of noise variance in the reconstructionby a factor of 1/k. Similarly, with non-linear processingquantization noise can be reduced by a factor of1/k2 (see,e.g., [20], [21], and references therein).
A similar noise reduction by oversampling can also be ob-tained while sampling a two-dimensional field. As in SectionII-D2 let Ω = [−ρ, ρ] × [−ρ, ρ] and assume that the sensorsmove along equispaced straight lines parallel to the x-axisand spaced∆y = π
ρapart. The temporal Nyquist sampling
rate along the lines isvρπ
wherev denotes the speed of thesensors. Now if the sensors take samples atk times the Nyquistrate, the effective sampling operation can be interpreted as ameasurement of the inner products of the field with vectorsfrom k disjoint orthogonal bases, as discussed in [19, p. 136].Since these vectors form a tight frame with redundancyk, itfollows via [19, Prop. 5.3] that oversampling by a factor ofk leads to a reduction in noise variance in the reconstructionby a factor of1/k when sampling in the presence of additivezero-mean white measurement noise. It is possible that theknown result [22] on the reduction of quantization noise byoversampling can also be extended to the two-dimensionalcase, but we do not consider such an extension here.
F. Non-uniform sensor speeds
In practice it may not always be possible to ensure thatthe sensors move at a constant velocity. We now analyze themobile sensing of a one-dimensional fieldf bandlimited toΩ = [−ρ, ρ] using a sensor with time-varying speed. Theanalysis can be generalized to sensors moving along straight
line trajectories in higher-dimensional fields, since the restric-tion of the higher-dimensional field to such trajectories isalsobandlimited (see, e.g., [23]). Suppose that the positionx(t)of the sensor at timet is a known monotonically increasingfunction of timet. We have so far studied the case whenx(t)is an affine function, i.e., when the sensor has constant speed.In that case the signals0(t) = f(x(t)) is exactly bandlimitedand hence can be sampled uniformly. For non-affine functionsx(t), the signals0(t) = f(x(t)) is not bandlimited. However,such a signal is also essentially bandlimited to someρ0 < ∞.The value ofρ0 can be calculated as we show in the appendix.Hence we can obtain an approximate reconstruction ofs0(t)by uniformly sampling an appropriately filtered version of it.Although this filtering operation is linear and time-invariant,there is still some distortion introduced because of the non-linearity in x(t) which we now analyze. Lethlp(.) denote theimpulse response of an ideal low-pass filter (LPF) employedprior to sampling. Let∆lp denote its3-dB spread in thetemporal domain. Denote byz(t) the output of the low-passfilter. We have
z(t) =
∫
τ
s(τ)hlp(t− τ)dτ = z(t) + w(t) (22)
with
z(t) =
∫
τ
f(x(τ))hlp(t− τ)dτ
=
∫
x
f(x)hlp(t− T (x))
v(T (x))dx (23)
wherev(t) = dx(t)dt
is the velocity function,T (.) := x−1(.)is the inverse function ofx(.), andw(t) =
∫
τw(x(τ))hlp(t−
τ)dτ . Thus at the output of the sampler, we get uniformsampleszn := z(tn) at timestn := nT . Two observationsare in order. The spatial separation between two successivesamples is approximately,xn+1 − xn ≈ v(tn)(tn+1 − tn)which means that samples are taken farther apart in spacewhen the sensor is moving fast. We also note from (23) that theeffective spatial spread of the sampling kernel while obtainingsamplezn is given by v(tn)∆lp which means that samplesobtained while the sensor is moving fast are obtained via abroader effective sampling kernel in space. It is also clearfrom(23) that the sampling kernel is also scaled down by a factorproportional to the velocity. Now, sincez(t) is bandlimited,it can be reconstructed exactly from its uniformly spacedsamples by sinc interpolation. Hence we can reconstruct anestimate for the field asf(x) := z(T (x)). Clearly f(x) canbe expressed asf(x) = z(T (x)) + w(T (x)) where the firstterm z(T (x)) represents the contribution of the true field inthe estimate and the second term represents the contributionof noise. We note that even in the absence of noise thereconstructed field is a distorted version of the field due tothe non-linearity inx(t). The distortion inz(T (x)) can bequantified as follows:
∫
R
(f(x) − z(T (x)))2dx =
∫
R
(s0(t)− z(t))2v(t)dt
≤ v‖s0 − z‖22 (24)
where v = supt |v(t)| denotes the maximum speed of thesensor and‖s0− z‖22 denotes the total energy ins0(t) outside

9
of the passband of the LPF. This suggests that the amount ofdistortion in the reconstruction can be reduced by increasingthe bandwidth of the low-pass filter. This however comes ata cost of increasing the contribution of noisew(.) in thereconstructed fieldf(.). As a heuristic one can use the effectivebandwidth of the signals0(t) = f(x(t)) as the bandwidth ofthe low-pass filter.
III. T IME-VARYING FIELDS
We now consider the more general problem of samplingtime-varying spatial fields using mobile sensors. We focus ontime-varying fields in one-dimensional space - i.e., fields ofthe form f(x, t) wherex ∈ R is a one-dimensional spatialparameter andt denotes time. Our approach can be extendedto time-varying fields in higher-dimensional spaces.
A. Sampling and reconstruction
Let f(x, t) wherex, t ∈ R, denote a time-varying field inone-dimensional space. Suppose thatf is bandlimited toΩ ⊂R
2. If x(t) denotes the position of a moving sensor at timet, the signal seen by the sensor is given byf(x(t), t). For asensor moving at a constant speedv the position is an affinefunction of time of the formx(t) := u + vt. Then it is clearfrom (4) that the signals0(t) = f(x(t), t) is bandlimited to
vωx + ωt : (ωx, ωt) ∈ Ω. (25)
Thus in the absence of noise, the signals0(t) is bandlimitedand can be exactly reconstructed by taking its samples atuniform intervals, as in the time-invariant case we consideredin Section II-B2. In the presence of noise, an anti-aliasingfilter with the appropriate bandwidth can be employed priorto sampling like in the time-invariant case. Furthermore, if thesensors are moving at non-uniform speeds then the signalsare not exactly bandlimited but they can be approximated bybandlimited signals by following an approach similar to thatin Section II-F.
We consider a scheme of sampling using a uniform col-lection of mobile sensors moving with equal velocities andseparated by a constant separation in space. Such a configura-tion of moving sensors is illustrated in Figure 6(a). Each linein the figure represents the position of an individual sensoras a function of time. The moving sensors are separated bya distance of∆ apart and move in the positivex directionat a constant speed ofv represented by the slopetan θ ofthe lines in the figure. From (25) we know that the signalseen by each sensor is bandlimited toρt + vρx. We assumethat the sensors sample in time at the temporal Nyquist rateof ρt+vρx
π. We further assume that the samples taken by the
various sensors are all synchronized in time such that thecollection of all samples lie on a two-dimensional lattice.Inthis case, we know from classical sampling theory [6] that wecan perfectly reconstruct any spatio-temporal field bandlimitedto Ω from its values at these sample locations provided thatthe repetitions of its spectra do not overlap in the spectrumofthe samples. Furthermore, since the temporal sampling rateisabove the Nyquist rate, it can be shown that only repetitionsalong one direction need be considered. These repetitions are
∆
∆cos θθt
x
(a) Sensor trajectories.
2π∆cos θ
π2−θ
Ωωx
ωt
ρt
ρx
−ρt
−ρx
(b) Repetitions in sampled spectrum.
Fig. 6. Uniform configuration of moving sensors and resultant spectrum.
illustrated in Figure 6(b) for a rectangular set of the formΩ = [−ρx, ρx]× [−ρt, ρt]. A detailed explanation of this no-alias condition can be found in [14] for time-invariant fields.
We now explicitly compute the no-alias conditions for twospecific choices ofΩ.
1) Spatio-temporal field bandlimited to rectangular region:SupposeΩ = [−ρx, ρx]×[−ρt, ρt] is a rectangular region. Un-der the sampling configuration described above, the conditionto ensure that there is no aliasing in the field reconstruction isthat the repetitions shown in Figure 6(b) do not overlap. Thismeans that∆ should satisfy either
2π
∆> 2ρx or
2π
∆tan θ > 2ρt.
Sincetan θ represents the velocity of the sensors, the abovecondition is equivalent to the following requirement on thespatial separation between adjacent moving sensors:
∆ < πmax
v
ρt,1
ρx
. (26)
Thus πmax
vρt, 1ρx
is the maximum admissible spatialseparation between adjacent sensors.
2) Wave field:We now consider a time-varying field witha non-rectangular frequency spectrum. Suppose we are inter-ested in reconstructing the spatio-temporal wave field along aline. Assume that the field is produced by bandlimited sourceslocated far from the region of interest. In this setting, we canuse the far-field approximation to study the spectrum of thebandlimited field. It was shown in [24] that the spectrum ofsuch a field is approximately supported on the region shown inFigure 7(a). Hereρt is the bandwidth of the source signals andρx = ρt
cwherec denotes the speed of propagation of the wave.
Now suppose that we sample the field using moving sensorswith trajectories shown in Figure 6(a) under the samplingconfiguration described before. Then, as before the condition

10
Ωρt
ρx
ωx
ωt
(a) Wave field spectrum
2π∆cos θ
θ
ωx
ωt
(b) Sampled wave field spectrum
Fig. 7. Far-field spectrum of a bandlimited source and its sampled versionfrom samples taken by the mobile sensors of Figure 6(a).
required to ensure that there is no aliasing is that the spectralrepetitions in Figure 7(b) do not overlap. It follows from thefigure that for sensor velocitiesv < c a sufficient conditionon the spacing∆ to ensure that the spectral repetitions do not
overlap is that−2π
∆< −2ρx +
ρxρt
2π
∆tan θ, or equivalently
∆ <π
ρx(1 +
v
c). (27)
A similar analysis can also be performed for sampling awave field over two-dimensional space using moving arraysof sensors. The sampling of such a field using an array ofsensors is described in [25]. These ideas can be extended tothe case of mobile sampling by following an approach like theone we described in this section.
B. Comparison with static sampling
In Section II-D we noted the advantages of mobile samplingover static sampling obtained by using an anti-aliasing filter tolimit the contribution of out-of-band noise while samplingandreconstructing time-invariant fields. For sampling time-varyingfields, however, such an advantage is not as significant. Con-sider filtering and sampling a one-dimensional time-varyingfield using sensors moving according to the configurationdepicted in Figure 6(a). In this case, we are essentially filteringalong the lines in thet-x plane shown in Figure 6(a). We notethat it is possible to filter over time even with static sensors.This would amount to filtering along lines parallel to thet-axis in Figure 6(a). Thus the only difference between filteringin the mobile and static sensing cases is in the direction offiltering in thet-x plane. Hence the relative advantages of thetwo schemes would depend on the spectral characteristics ofthe additive noise. However, mobile sensing offers a differentsort of advantage over static sensing: In some situations, wecan get a reduction in the spatial density of sensor deploymentrequired while using mobile sensors, as we show below.
Consider a time-varying field bandlimited to a rectangularregion [−ρx, ρx] × [−ρt, ρt] as in Section III-A1. We knowfrom classical sampling [6] that for sampling with static sen-sors the maximum spacing allowed between adjacent sensorsis π
ρx. Comparing with the spacing requirement in the mobile
setting given in (26), it follows that when the mobile sensorsare moving at a speedv > ρt
ρx, the inter-sensor spacing can be
increased by a factor ofvρx
ρt. In other words, this means that for
a given length of the spatial region of interest, we can reduce
eastings (m)
nort
hing
s (m
)
5.33 5.3305 5.331 5.3315 5.332 5.3325x 10
5
1.523
1.5235
1.524
1.5245
1.525
1.5255
1.526
x 105
8.5
9
9.5
10
10.5
11
T (°C)
Fig. 8. Spatial temperature field on EPFL campus.
Fig. 9. Bandlimited approximation of the radiation field near Fukushima.
the number of sensors required by a factorρt
vρx. The advantage
is more significant whenv ≫ ρt
ρx, i.e., for spatio-temporal
fields that vary slowly in time and at fast rate over space.This matches with the intuition that slowly varying fields areeasier to track using mobile sensors. However, as the speedv is increased, the required temporal rate of sampling givenby the Nyquist rate,ρt+vρx
π, also increases. Hence, in short,
by using moving sensors we can reduce the spatial density ofsensors at the cost of increasing their temporal sampling rates.
Now consider the scenario of sampling a wave field along aline located in the far field of bandlimited sources as in SectionIII-A2. For sampling with static sensors the maximum spacingallowed between adjacent sensors is againπ
ρx. Hence it follows
from (27) that the inter-sensor spacing can be increased by afactor of (1 + v
c) when we employ sensors moving at speed
v. This observation suggests that for wave field reconstructionwe get a significant improvement in the sensor spacing usingmobile sensing only when the sensors can move at a speed ofthe order of the speed of wave propagation in the medium.
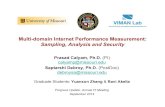
IV. SIMULATIONS : MERITS OF MOBILE SENSING
We simulated the static and mobile sampling schemes formeasuring the surface temperature field on a portion of the
TABLE IIPERCENTAGE ROOT-MEAN-SQUARE ERRORS WITH VARIOUS SCHEMES.
Data type Staticsensing
Mobilesensing
Mobile sensing withoversampling
Temperature 0.53% 0.45% 0.42% (no filter)Bandlimited radia-tion (SNR20 dB)
9.9% 1.5% 1.5% (with filter)

11
EPFL campus. For the true temperature field we used thereadings obtained from [26] as illustrated in Figure 8. Forstatic sensing, we considered sensors on a rectangular grid.For mobile sensing we assumed that the sensors move parallelto thex-axis and apply an anti-aliasing filter prior to sampling,like in Section II-B2. They take samples at the same pointson the rectangular grid as in the static case. As seen in Figure8 the field has sharp variations in space and hence is notbandlimited. Thus we expect some aliasing in the reconstruc-tion obtained via sinc interpolation from samples of sucha field. In Table II we list the percentage root-mean-squareerrors in the reconstructed fields, defined as‖f−f‖2
‖f‖2× 100.
The last column represents the performance obtained withmobile sensing assuming that the sensors measure the fieldat all points on their paths without any filtering. As thevalues in the table indicate, mobile sampling outperforms staticsampling, and oversampling along the trajectories improvesthe performance further. The filtering operation in the mobilesampling scheme reduces the amount of aliasing in the samplesleading to a reduction in the reconstruction error. We notethat the temperature field is not truly bandlimited and hencethe performance gains are more modest than what could beexpected if the field were truly bandlimited.
We also simulated the same schemes for sampling andreconstructing a truly bandlimited field in noise. For the truefield shown in Figure 9 we used a bandlimited approximationto the spatial radiation field around the site of the Fukushimanuclear accident on 11 March 2011. The radiation levels inthis field were measured in units of micro-Sieverts per hour(µSv/h) at various positions during the months of July -September, 2011, and are available online at [27]. We consid-ered the sampling of a noisy version of this field with the noisespectrum as described in the statement of Proposition 2.1, withthe ratio of the sidesa = 40 and estimated the percentage root-
mean-square errors
√E[‖f − f‖22]
‖f‖2×100 in the reconstruction.
The values of the errors shown in Table II suggest that thereduction in the error obtained with mobile sensing is moresignificant than that was seen for the temperature field. Wealso see that the ratio of the errors under the static and mobilereconstruction schemes is approximatelya
12 as expected by the
result of Proposition 2.1. In this example we allow filteringin the oversampling scheme since the field of interest isbandlimited. From the last column of Table II we see that thereis no improvement in accuracy with oversampling. This isexpected since there is no advantage in increasing the samplingrate beyond the Nyquist rate.
V. CONCLUSION AND FUTURE WORK
In this paper we have studied strategies for sampling and re-constructing a bandlimited spatial field using moving sensors,including both time-invariant and time-varying fields. We high-lighted and quantified the advantages of mobile sensing overclassical static sensing, both in theory and through simulations.Our results for time-invariant fields clearly demonstrate thefollowing advantages when using a time domain anti-aliasingfilter together with a mobile sensor:
(i) For non-bandlimited fields: Anti-aliasing filtering withmobile sampling suppresses aliasing in the directionof motion. For one-dimensional fields, higher samplingrates yield lower distortion in the reconstruction.
(ii) For bandlimited fields in noise: Anti-aliasing filteringwith mobile sampling suppresses noise in the direction ofmotion. This prevents aliasing in the direction of motion.Sampling at the Nyquist rate is sufficient.
In the latter case we quantified the SNR improvement of themobile sampling scheme over the static sampling scheme.For time-varying fields, we demonstrated the improvement insampling density that can be obtained by using mobile sensors.
In our analysis of mobile sensing of time-invariant fieldsin R
2 we considered only trajectories composed of a setof equispaced parallel lines. The analysis of SNR in thereconstruction can be generalized to higher dimensional spacesand to more general configurations of straight line trajectorieslike the ones studied in [14]. In practice one may be forcedto use non-linear sensor trajectories. In such cases, a possibleapproach would be to approximate the paths by straight linesegments and then use the appropriate anti-aliasing filterstoreduce spatial anti-aliasing as we did for the non-uniformspeed sensing example of Section II-F. However, quantifyingthe noise suppression in such cases would be more complex.For general trajectories, it would be interesting to study thetradeoff between the SNR improvement and thepath densitymetricof the trajectories introduced in [14]. Similar extensionsare also relevant for studying time-varying fields.
For making mobile sampling schemes practical, one wouldalso need to consider the effects of mobility on the fieldand on the sensing process. It is possible that the physicalprocess of moving the sensor through the field may affect thecharacteristics of the field or introduce noise and irregularitiesin the sensing process. These effects must also be taken intoaccount to completely characterize the advantages of mobilesensing over static sensing in practice.
ACKNOWLEDGEMENTS
This research was supported by ERC Advanced Investiga-tors Grant: Sparse Sampling: Theory, Algorithms and Appli-cations SPARSAM no 247006.
APPENDIX
BANDWIDTH OF TIME-WARPED SIGNALs0(t) = f(x(t))
Consider a piecewise-affine function of the form
x1(t) =
K∑
k=1
(uk + vkt)It ∈ [tk, tk+1). (28)
where tk < tk+1, and 0 ≤ vk ≤ v where v denotesthe maximum speed of the sensor. Let∆k := tk+1 − tk,∆ := mink ∆k and tk := tk+1+tk
2 . We know that the Fouriertransform ofs1(t) := f(x1(t)) is given by
S1(ξ) =K∑
k=1
[
1
vke
jakξ
vk F
(
ξ
vk
)
∗ξ e−jξtk∆ksinc
(
ξ∆k
2π
)]
(29)

12
whereF (.) denotes the Fourier transform of the fieldf(.), andthe operation∗ξ denotes convolution with respect toξ. Fromthe structure of the Fourier transform we can argue as in [28]that the effective bandwidth ofs1 is given by
maxk
[vkρ+1
∆k
] ≤ vρ+1
∆. (30)
We now study how the Fourier transform of the observedsignal gets modified by a slight deviation from the piecewiseaffine trajectory. Suppose the trajectory is given by
x(t) =
K∑
k=1
(uk + vkt+ ǫxk(t))It ∈ [tk, tk+1). (31)
Let ρx denote the maximum low-pass bandwidth of allxk.Assume thatf is twice differentiable. Then we have byTaylor’s approximation that fort ∈ [tk, tk+1),
s0(t) = f(x(t))
= f(uk + vkt+ ǫxk(t)), for t ∈ [tk, tk+1)
= f(uk + vkt) + f ′(uk + vkt)ǫxk(t) + O(ǫ2)
Using S0(ξ) to denote the spectrum ofs0(t) it follows thatfor small ǫ we have
S0(ξ)− S1(ξ) = ǫ
K∑
k=1
jξ
v2ke
jakξ
vk F
(
ξ
vk
)
∗ξ Xk(ξ)∗ξ
e−jξ∆k
2 ∆ksinc
(
ξ∆k
2π
)
+O(ǫ2).(32)
Thus, we can argue that for smallǫ the difference betweenthe Fourier transforms ofs0(t) and s1(t) is given by a termproportional toǫ over frequencies in the range
|ξ| ≤ maxk
[vkρf + ρxk+
1
∆k
] ≤ vρf + ρx +1
∆
and only by terms of orderO(ǫ2) for other frequencies. Byconsidering higher order terms in the Taylor series expansion,it follows that the difference between Fourier transforms ofs0(t) and s1(t) is given by a term of orderO(ǫm+1) overfrequencies outside of the range
|ξ| ≤ vρf +mρx +1
∆.
REFERENCES
[1] F. Ingelrest, G. Barrenetxea, G. Schaefer, M. Vetterli,O. Couach, andM. Parlange, “Sensorscope: Application-specific sensor network forenvironmental monitoring,”ACM Trans. Sen. Netw., vol. 6, pp. 17:1–17:32, March 2010.
[2] A. Kumar, P. Ishwar, and K. Ramchandran, “High-resolution distributedsampling of bandlimited fields with low-precision sensors,” IEEE Trans.Inf. Theory, vol. 57, no. 1, pp. 476 –492, Jan. 2011.
[3] G. Reise and G. Matz, “Distributed sampling and reconstruction of non-bandlimited fields in sensor networks based on shift-invariant spaces,”in IEEE Conference on Acoustics, Speech and Signal Processing, Taipei(Taiwan), April 2009, pp. 2061–2064.
[4] A. Singh, R. Nowak, and P. Ramanathan, “Active learning for adaptivemobile sensing networks,” inProceedings of Information Processing inSensor Networks (IPSN), 2006, 2006.
[5] A. Cigada, M. Lurati, F. Ripamonti, and M. Vanali, “Moving micro-phone arrays to reduce spatial aliasing in the beamforming technique:theoretical background and numerical investigation,”J. Acoust. Soc. Am,vol. 124, no. 6, pp. 3648–3658, 2008.
[6] D. P. Petersen and D. Middleton, “Sampling and Reconstruction ofWave-Number-Limited Functions in N-Dimensional Euclidean Spaces,”Inform. Contr., vol. 5, pp. 279–323, 1962.
[7] B. Rafaely, B. Weiss, and E. Bachmat, “Spatial aliasing in sphericalmicrophone arrays,”IEEE Trans. Signal Process., vol. 55, no. 3, pp.1003 –1010, March 2007.
[8] A. Kumar, P. Ishwar, and K. Ramchandran, “Dithered A/D Conversion ofSmooth Non-Bandlimited Signals,”IEEE Trans. Signal Process., vol. 58,no. 5, pp. 2654 –2666, may 2010.
[9] S. Spors and R. Rabenstein, “Spatial aliasing artifactsproduced by linearand circular loudspeaker arrays used for wave field synthesis,” in InAudio Engineering Society (AES) 120th Convention, 2006.
[10] T. Ajdler, “The plenacoustic function and its applications,” Ph.D.dissertation, Ecole Polytechnique Federale de Lausanne, Lausanne,Switzerland, 2006.
[11] T. Ajdler, L. Sbaiz, and M. Vetterli, “Dynamic measurement of roomimpulse responses using a moving microphone,”J. Acoust. Soc. Am, vol.122, no. 3, pp. 1636–1645, 2007.
[12] G. Enzner, “Analysis and optimal control of lms-type adaptive filteringfor continuous-azimuth acquisition of head related impulse responses,”in Acoustics, Speech and Signal Processing, 2008. ICASSP 2008. IEEEInternational Conference on, 31 2008-april 4 2008, pp. 393 –396.
[13] S. Srinivasan and K. Ramamritham, “Contour estimationusing col-laborating mobile sensors,” inProceedings of the 2006 workshop ondependability issues in wireless ad hoc networks and sensornetworks,ser. DIWANS ’06. New York, NY, USA: ACM, 2006, pp. 73–82.
[14] J. Unnikrishnan and M. Vetterli, “Sampling High-DimensionalBandlimited Fields on Low-Dimensional Manifolds,” Oct. 2012,accepted for publication in IEEE Trans. Inf. Theory. [Online].Available: http://arxiv.org/abs/1112.0136
[15] A. V. Oppenheim, R. W. Schafer, and J. R. Buck,Discrete-time signalprocessing (2nd ed.). Upper Saddle River, NJ, USA: Prentice-Hall,Inc., 1999.
[16] S. Ramani, D. Van De Ville, T. Blu, and M. Unser, “Nonideal samplingand regularization theory,”IEEE Trans. Signal Process., vol. 56, no. 3,pp. 1055 –1070, 2008.
[17] Z. Cvetkovic, I. Daubechies, and B. Logan, “Single-bitoversampledA/D conversion with exponential accuracy in the bit rate,”InformationTheory, IEEE Transactions on, vol. 53, no. 11, pp. 3979 –3989, Nov.2007.
[18] J. Proakis and M. Salehi,Digital Communications, ser. McGraw-Hillhigher education. McGraw-Hill, 2008.
[19] S. Mallat, A Wavelet Tour of Signal Processing, 2nd ed. AcademicPress, Sep. 1999.
[20] N. Thao and M. Vetterli, “Deterministic analysis of oversampled A/Dconversion and decoding improvement based on consistent estimates,”Signal Processing, IEEE Transactions on, vol. 42, no. 3, pp. 519 –531,mar 1994.
[21] Z. Cvetkovic and M. Vetterli, “Error-rate characteristics of oversampledanalog-to-digital conversion,”Information Theory, IEEE Transactionson, vol. 44, no. 5, pp. 1961 –1964, sep 1998.
[22] N. Thao and M. Vetterli, “Lower bound on the mean-squared error inoversampled quantization of periodic signals using vectorquantizationanalysis,”Information Theory, IEEE Transactions on, vol. 42, no. 2, pp.469 –479, Mar. 1996.
[23] R. Bracewell, The Fourier Transform and Its Applications, 3rd ed.McGraw-Hill Science/Engineering/Math, Jun. 1999.
[24] T. Ajdler, L. Sbaiz, and M. Vetterli, “The plenacousticfunction and itssampling,” Signal Processing, IEEE Transactions on, vol. 54, no. 10,pp. 3790 –3804, oct. 2006.
[25] J. Coleman, “Three-phase sample timing on a wideband triangular arrayof 4/3 the usual density reduces the nyquist rate for far-field signalsby two thirds,” in Signals, Systems and Computers, 2004. ConferenceRecord of the Thirty-Eighth Asilomar Conference on, vol. 1, Nov. 2004,pp. 284 – 288.
[26] D. Nadeau, W. Brutsaert, M. Parlange, E. Bou-Zeid, G. Barrenetxea,O. Couach, M.-O. Boldi, J. Selker, and M. Vetterli, “Estimation ofurban sensible heat flux using a dense wireless network of observations,”Environmental Fluid Mechanics, vol. 9, pp. 635–653, 2009.
[27] Safecast. [Online]. Available:http://blog.safecast.org/(Accessed:1October2011).
[28] M. Do, D. Marchand-Maillet, and M. Vetterli, “On the bandwidth of theplenoptic function,”Image Processing, IEEE Transactions on, vol. 21,no. 2, pp. 708 –717, Feb. 2012.