root locus B&Wweb.iaa.ncku.edu.tw/~chiehli/course/control/root_locus.pdf · Root locus with...
24
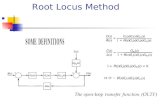
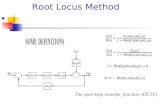
1 Root Locus Analysis Root Locus Analysis The transient response of a closed-loop system is completely determined by the location in the s-plane of the closed-loop system poles and zeros. This shows if the system is stable and also whether there is any oscillatory behaviour in the time response. Therefore, it is worthwhile to determine how the roots of the characteristic equation as a system parameter is varied. The root locus method is proposed by Evans in 1948 . It is a graphical method for system analysis and design
Transcript of root locus B&Wweb.iaa.ncku.edu.tw/~chiehli/course/control/root_locus.pdf · Root locus with...
-
1
Root Locus Analysis
Root Locus Analysis
The transient response of a closed-loop system is completely
determined by the location in the s-plane of the closed-loop
system poles and zeros. This shows if the system is stable and
also whether there is any oscillatory behaviour in the time
response. Therefore, it is worthwhile to determine how the
roots of the characteristic equation as a system parameter is
varied. The root locus method is proposed by Evans in 1948.
It is a graphical method for system analysis and design
-
2
Root Locus Concept
G(s)+-
E(s)R(s)k
Y(s)C(s)
1
)()()(
1
1sDsNsG =
)()()(
2
2sDsNsC =
)()()()()()(
)()(1)()()(
2121
21sDsDsNskN
sNsNsCskG
sCskGsT+
=+
=
-
3
The poles of T(s) = zeros of )()(1 sCskG+ = zeros of kN s N s D s D s1 2 1 2( ) ( ) ( ) ( )+
Let )()()()(
)()()()(
1
1
n
mpspszszsk
sPskZsCskG
++++
==LL
LL
then the closed-loop poles are the roots of P s kZ s( ) ( )+ = 0
Therefore
zeros loopopen system poles loopopen system
0)(0)(0
⇔=⇔=
⇒∞→⇒→
sZsP
kk
zeros loop-open the poles loop-closed thepolesloop-openthepolesloop-closed the0
→→
⇒∞→⇒→
kk
For certain k, to find the corresponding closed-loop poles isto find the roots of )()(1 sCskG+ = 0, that is todetermine s, such that 1)()( −=sCskG .
For k > 0Find s, such that(1) 1)()( =sCskG , (Magnitude condition)
(2) arg π)21()}()({ rsCskG += (Phase condition)
r Z∈
-
4
Root Locus Construction
1. Loci branchThe branches of the locus are continuous
curves that start at each of n poles of G(s)C(s),for k > 0. As k → +∞ , the locus branchesapproach the m zeros of G(s)C(s). Locusbranches for excess poles extend infinitely farfrom the origin; for excess zeros, locus segmentextends from infinity.
Example
Consider )84)(2(
)1()()( 2 ++++
=sss
ssCsG , the corresponding
root locus branch, for k = [0, 10] are shown below.
-8 -6 -4 -2 0-4
-3
-2
-1
0
1
2
3
4
-
5
2. Real-axis locusThe root locus on those portion of the real axis for which thesum of poles and zeros to the right is an odd (even) number,for k > 0 (for k < 0).
3. Locus end pointspoles ⇒ zeros (finite or infinite) for k → ∞
4. Asymptotes of locus as s → ∞The angles of the asymptotes of the root locus branches,which end at infinity, are given by:
φ asyr
n m=
+−
( )1 2 180o , k > 0
φ asyrn m
=⋅−
2 180o , k < 0
Note: For s → ∞ ,
)(
)(lim)()(lim
in
i
jm
j
ss ps
zsksCskG
−
−
=∞→∞→
π
π
n
m
s ssk
)()(
limσσ
−
−≅
∞→
mns sk
−∞→ −=
)(lim
σ
= -1 ⇒ ks mn −=− −)( σ
zrmn
rjks mn ∈−+
+= − ),)12(exp(1 πσ
})arg{()21(180}arg{ mnsrk −−=+=− σo ∴ − = +( ) arg{ } ( )n m s r180 1 2o
Therefore, φ asyr
n m=
+−
( )1 2 180o , for k > 0.
-
6
ExampleConsider the following system
+-
E(s)R(s) Y(s)
s(s+2)k
1
kG s ks s
( )( )
=+ 2
T s ks s k
( ) =+ +2 2
The poles of T(s) ⇒ the roots of s2 + 2s + k = 0
⇒ − ± −1 1 k
For k ≤ 1, the roots are real within [-1, 0].For k > 1, the roots are complex conjugates with real part = -1.
-3 -2 -1 0 1-2
-1
0
1
2
φ1φ2
φ φ1 2 180+ =o (phase Condition)
-
7
Since
By polynomial parameter comparison, thecommon point at which all asymptotes intercept thereal axis is given by
σ =−
−==
∑∑ Re( ) Re( )p zn m
i jj
m
i
n
11 , 2≥− mn
Note: A root locus branch may cross its asymptote.
zrmn
rjks mn ∈−+
+= − ),)12(exp(1 πσ
6. Break-away/ Break-in point on the real axisThe break-away point for the locus between two
poles on the real-axis occurs when the value of k is amaximum. The break-in point for the locus betweentwo zeros on the real-axis occurs where the value kis a minimum.
k = ∞k = ∞k = 0k = 0
kmax
kmin
-
8
)()()}()({ 1
sZsPsCsGk −=−= −
∂∂ ks
= 0 ⇒ 1 02Z sP s dZ s
dsZ s dP s
ds( )( ) ( ) ( ) ( )−⎛⎝⎜
⎞⎠⎟ =
(1)
(2) Find the roots of )]()([ sCskGdsd = 0
The roots of )]()([ sCskGdsd = 0 are the
break-in/break-away points for all k R∈
Formula:dds
f f dds
f= ln
Hint: dsdf
dsdf
fff
dsdf == 1ln
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛=
)()(ln
)()(
)()()]()([
sPsZ
dsd
sPsZ
sPsZ
dsdsHskG
dsd
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛=
dssdP
sPdssdZ
sZsPsZ )(
)(1)(
)(1
)()(
⎟⎠⎞
⎜⎝⎛ −=
dssdPsZ
dssdZsP
sP)()()()(
)(1
2
-
9
Example
Consider ss
sksCskG)2()4()()(
++
= . Using the formula above,
it is obtained that1
41 1
2s s s+= +
+ ⇒ s = -6.83, or -1.17
-10 -8 -6 -4 -2 0-3
-2
-1
0
1
2
3
-6.83
-1.17
K > 0
-5 0 5-5
0
5
K < 0
-
10
7. Angles of departure and approachThe angle of departure φd of a locus branch from a complex pole is given by
∑∑−=
ionconsideratunder pole the to toangle zero )()(+
ionconsideratunder pole the to toangle pole )()(other 180
sCsG
sCsGdoφ
The angle of approach φa of a locus branch from a complex zero is given by
o180
ionconsideratunder pole the to toangle zero )()(other
ionconsideratunder pole the to toangle pole )()(
−
−
=
∑∑
sCsG
sCsGaφ
Example
-4 -3 -2 -1 0-2
-1
0
1
2210
120
90
o
ooo
210
12090180
=
+−=dφ
o
ooo
180
18000
=
−−=aφ
-
11
Imaginary axis crossing pointThe value of k that cause a change of sign in the
Routh Array, is that value for which the locus crossesinto the right half s-plane.
Note:point of crossover s xj= → =phase 180o .
Example
Consider )2)(1(
6)()(++
=sss
ksCskG . The Routh array for
the unity-feedback closed-loop system is
s3 1 2s2 3 6ks1 2 - 2ks0 6k
1=→ k 063 2 =+⇒ s
js 2±=
-
12
Non-intersection or intersection of root locus branchesThe angle between two adjacent approaching branches is
αλλ
= ±360o
where λ denotes the number of branchesapproaching and leaving the intersection point.The angle between a branch leaving and anadjacent branch that is approaching the samepoint is given by
βλλ
= ±180o
Example
-4 -3 -2 -1 0-2
-1
0
1
2
leaving branch
approaching branch
αλ = 180
βλ = 90
-
13
Grant’s Rule
For system rank ≥ 2, Grant‘s rule state that the sum ofthe (unity-feedback) closed-loop system poles is equalto the sum of the open-loop system poles.Note:
P s kZ s( ) ( )+ = 0⇒ s a s a s a s an n
nn
n+ + + + + =−−
−−
11
22
1 0 0LL ,where an−1 is independent of k also
an− = −∑1 poles
我可能要來杯咖啡才行
-
14
Example
Plot the unity feedback closed-loop root locus for
)2)(1(1)()(
++=
ssssHsG
Solution
1. Open loop poles are : 0、-1、-2
Number of root-locus : 3
Root locus on the real axis ]2,( −−∞ and ]0,1[−
2. Asymptotes of locus as s → ∞
3)12( πθ += kk ,k=0,1,2。
Centroid of the asymptotes
13
)2()1(0−=
−+−+=σ
3. Imaginary axis crossing point
The characteristic equation is
0)2)(1( =+++ Ksss 023 23 =+++⇒ Ksss
and the corresponding Routh table is
-
15
Ks
KsKs
s
0
1
2
3
36
321
−
From the Routh table, the system will be stable for
60
-
16
Example
Plot the root locus for the system with
)22)(2(1)()( 2 +++
+=
sssssHsG
Solution:
1. Open-loop poles : j±−− 1,2 ,open-loop zero: -1
Number of the locus branches : 3
Locus on the real axis ]1,2[ −−
2. Asymptotes of locus as s → ∞
213)12( πθπθ =⇒
−+
=k
k ,
Centroid of the asymptotes
23
13)1()1()1()2(
−=−
−−−−++−+−=
jjσ
3. Angle of deparature: φd
πφφφφ )12()( 21 +=++− kdppz ππφ )12(4
+−−=⇒ kd
For πφ43 ,1 d =−=k 。
-
17
Example
Consider the system with
)1(1)()(+
=ss
sHsG
Plot the root locus of the following cases.
(i)with additional pole at –2
(ii)with additional zero at -2
-
18
Root locus without additional pole and zero
Additional pole
Root locus with additional pole -2
-
19
Additional zero
Root locus with additional zero -2
Example
)1()1()( 2
2
++
=sssKsG
Consider a negative unity feedback system has a plant transfer function
(a) Sketch the root locus for K > 0. (b) Find the gain K when two complex roots have a damping ratio and calculate all three roots. (c) Find the entry point (break-in point) of the root locus at the real axis.
707.0=ζ
-
20
j
K
sss
ssKsKKss
sssKs
n
nnnn
nn
22 ,5723.0 :Roots5723.0619.487.2
matching tsCoefficien0)414.1()414.1(
0)2)((0)12(
0)1()1()(
1Method
2223
2223
22
±−−===
=+++++
=+++⇔=++++
=+++=
α
ω
αωαωωωα
ωζωα
δ
Matlabby 96.196.1 ,58.0 :Roots j±−−
967.1967.1 ,584.0 :Roots j±−−
584.007382.7)934.37382.7()934.3(
0)7382.7934.3)((0518.4)1518.42(518.4
518.4
1967.2967.1967.1967.1)967.1967.0(
)967.1967.0()967.1967.0(
condition, magnitude From1.967j1.967- are roots conjugate the1.967x
-45180/π*1)))-(x/(xtan*2-1)/x)+((xtan+1)/x)-((x(tan
2r)180(1135))x
1x(tan180)x
1x(tan(180)1x
xtan2(180
2 Method
23
223
222222
2222
1-1-1-
111
=⇒=+++++
=+++⇔=++×++
=
=+×+×+
+×+×
±⇒==
+=++
−+−
−−−
− −−−
αααα
α
sss
ssssss
K
K
-
21
Conclusions
(1). The system will tend to be unstable with additional poles (increasing the system rank).
(2). The system will tend to be stable with additional zeros.
In many design exercises, zeros can be introduced to attract closed-loop poles and alter the root locus location. It is also very useful to applied stable pole-zero cancellation for improving system performance.
-
22
Exercise 1
-10 -8 -6 -4 -2 0-20
-10
0
10
20
-2.5)10(
)5()()( 2 ++
=sssksCskG
Exercise 2
-
23
Exercise 3
Exercise 4
-
24
Control System Design by Root Locus Method
1. Determine the desired dominant pole locations using the performance requirements.
2 . Calculate the phase of the desired pole location corresponding to the uncompensated system G(s), and determined the required phase change.
3. Determine the pole and zero of the compensator C(s), such that the phase of the desired pole location corresponding to the compensated system is 180.
4. Determine the value of K, such that is satisfied.
5. Confirm the result by time domain simulation.1)()( =sCsKG