Representation and reasoning of geometric tolerances in design€¦ · Geometric tolerances in...
17
Artificial Intelligence for Engineering Design, Analysis and Manufacturing (1997), 11, 325-341. Printed in the USA. Copyright © 1997 Cambridge University Press 0890-0604/97 $11.00 + .10 Representation and reasoning of geometric tolerances in design JHY-CHERNG TSAI 1 AND MARK R. CUTKOSKY 2 'Mechanical Engineering Department, National Chung-Hsing University, Taichung, Taiwan 40227, ROC 2 Mechanical Engineering Department, Stanford University, Stanford, CA 94305, USA (RECEIVED April 1, 1996; ACCEPTED November 18, 1996; REVISED January 15, 1997) Abstract The geometric dimensioning and tolerancing (GD&T) specifications of a design are directly associated with its per- formance and functional requirements. They also govern the manufacturing and quality control processes needed to achieve those requirements. This paper reviews recent work in geometric tolerance representation and reasoning and presents a generic and uniform graph-based representation scheme, called the Tolerance Network, to represent GD&T specifications across a part or assembly. The network can accommodate GD&T specifications related to the function, behavior, manufacturing, and inspection requirements embedded in design specifications and supports the use of dif- ferent types of tolerances. The network also accommodates common design practices such as the specification of over- constrained features and parts. The necessary properties of such a network are discussed that allow under- and overconstrained design specifications to be detected and analyzed. Keywords: Geometric Tolerance; Tolerance Representation; Tolerance Reasoning; Geometric Dimensioning and Tolerancing 1. INTRODUCTION Advances in manufacturing technologies and increasing competition in the global marketplace have led to an in- creasing emphasis on product quality. One measure of the quality of a product is the precision of its components, which affects the product's reliability and accuracy. Product qual- ity begins at design time, and tolerance specification and analysis are consequently important aspects of design. The geometric dimensioning and tolerancing (GD&T) specifications of a product design are directly associated with how it performs. They also govern the required procedure and accuracy for manufacturing and quality control. How- ever, the relationships among design specifications, geomet- ric dimensions and tolerances, and manufacturing and inspection processes are often difficult to establish and treat systematically. Until recently, this problem has been exac- erbated by the lack of a unified and systematic scheme for representing and operating on GD&T specifications from design and manufacturing perspectives. Reprint requests to: Jhy-Chemg Tsai, Mechanical Engineering Depart- ment, National Chung-Hsing University, Taichung, Taiwan 40277, ROC. Phone: (886)(4)284-0433; E-mail: [email protected]; Fax: 886-4- 287-7170. 1.1. An illustrative example To better understand the issues, it is useful to start with an example. Figure la shows a planar manipulator designed as a 5-bar linkage in the horizontal plane (Akella et al., 1991). The manipulator is driven by two motors, which are con- nected to shaft encoders for measuring the joint angles. From a functional standpoint, the accuracy of the manipulator end- point is of primary importance. The endpoint position is ob- tained by reading the encoder angles and computing the linkage forward kinematics. Tolerances on all components of the linkage affect the endpoint accuracy; therefore, the GD&T specifications need to be assigned with care. One of the motor-encoder subassemblies is shown in Fig- ure lb. A machined aluminum coupling attaches the motor to the encoder and to one of the links. The motor and en- coder are, respectively, mounted to a motor-clamp and an encoder-clamp. The encoder-clamp is attached to the motor- clamp, which is then mounted to the ground. Focusing on the coupling, we note that its functional re- quirements include transmitting rotary motions between the motor, the encoder, and the linkage and supporting the link- age and keeping it parallel to the ground. Figure 2 shows the geometric tolerancing specifications of the coupling, with 325 Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.
Transcript of Representation and reasoning of geometric tolerances in design€¦ · Geometric tolerances in...

Artificial Intelligence for Engineering Design, Analysis and Manufacturing (1997), 11, 325-341. Printed in the USA.Copyright © 1997 Cambridge University Press 0890-0604/97 $11.00 + .10
Representation and reasoning of geometrictolerances in design
JHY-CHERNG TSAI1 AND MARK R. CUTKOSKY2
'Mechanical Engineering Department, National Chung-Hsing University, Taichung, Taiwan 40227, ROC2Mechanical Engineering Department, Stanford University, Stanford, CA 94305, USA
(RECEIVED April 1, 1996; ACCEPTED November 18, 1996; REVISED January 15, 1997)
Abstract
The geometric dimensioning and tolerancing (GD&T) specifications of a design are directly associated with its per-formance and functional requirements. They also govern the manufacturing and quality control processes needed toachieve those requirements. This paper reviews recent work in geometric tolerance representation and reasoning andpresents a generic and uniform graph-based representation scheme, called the Tolerance Network, to represent GD&Tspecifications across a part or assembly. The network can accommodate GD&T specifications related to the function,behavior, manufacturing, and inspection requirements embedded in design specifications and supports the use of dif-ferent types of tolerances. The network also accommodates common design practices such as the specification of over-constrained features and parts. The necessary properties of such a network are discussed that allow under- andoverconstrained design specifications to be detected and analyzed.
Keywords: Geometric Tolerance; Tolerance Representation; Tolerance Reasoning; Geometric Dimensioningand Tolerancing
1. INTRODUCTION
Advances in manufacturing technologies and increasingcompetition in the global marketplace have led to an in-creasing emphasis on product quality. One measure of thequality of a product is the precision of its components, whichaffects the product's reliability and accuracy. Product qual-ity begins at design time, and tolerance specification andanalysis are consequently important aspects of design.
The geometric dimensioning and tolerancing (GD&T)specifications of a product design are directly associated withhow it performs. They also govern the required procedureand accuracy for manufacturing and quality control. How-ever, the relationships among design specifications, geomet-ric dimensions and tolerances, and manufacturing andinspection processes are often difficult to establish and treatsystematically. Until recently, this problem has been exac-erbated by the lack of a unified and systematic scheme forrepresenting and operating on GD&T specifications fromdesign and manufacturing perspectives.
Reprint requests to: Jhy-Chemg Tsai, Mechanical Engineering Depart-ment, National Chung-Hsing University, Taichung, Taiwan 40277, ROC.Phone: (886)(4)284-0433; E-mail: [email protected]; Fax: 886-4-287-7170.
1.1. An illustrative example
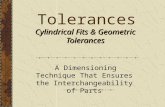
To better understand the issues, it is useful to start with anexample. Figure la shows a planar manipulator designed asa 5-bar linkage in the horizontal plane (Akella et al., 1991).The manipulator is driven by two motors, which are con-nected to shaft encoders for measuring the joint angles. Froma functional standpoint, the accuracy of the manipulator end-point is of primary importance. The endpoint position is ob-tained by reading the encoder angles and computing thelinkage forward kinematics. Tolerances on all componentsof the linkage affect the endpoint accuracy; therefore, theGD&T specifications need to be assigned with care.
One of the motor-encoder subassemblies is shown in Fig-ure lb. A machined aluminum coupling attaches the motorto the encoder and to one of the links. The motor and en-coder are, respectively, mounted to a motor-clamp and anencoder-clamp. The encoder-clamp is attached to the motor-clamp, which is then mounted to the ground.
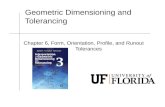
Focusing on the coupling, we note that its functional re-quirements include transmitting rotary motions between themotor, the encoder, and the linkage and supporting the link-age and keeping it parallel to the ground. Figure 2 showsthe geometric tolerancing specifications of the coupling, with
325
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

326 J.-C. TsaiandM.R. Cutkosky
dimensions omitted for clarity. At one side of the couplingis a motor-hole connected to the motor shaft. On the oppo-site side an encoder-hole fits the encoder shaft. On anotherside, perpendicular to the motor-hole, is the connecting-pegthat supports and transmits motions to the link. To deliveraccurate motion, the perpendicularity between the motor-hole and the connecting-peg is important. As motions trans-mitted to the encoder should be precise, and binding of themotor or encoder should be avoided, the concentricity be-tween the motor-hole and the encoder-hole is also critical.The three features also need an index datum reference frame(DRF) for setup during machining and inspection. This frameis constructed by datums A, B and C, as shown in the Fig-ure 2. As a result, there are redundant tolerances among thefeatures, resulting in an overtoleranced design.
As shown in this example, a designer will need a GD&Trepresentation scheme that allows her/him to make conve-nient tolerance specifications, sometimes resulting in over-dimensioned or overtoleranced (i.e., overconstrained) parts.The representation scheme must accommodate both func-tional (e.g., linkage accuracy) and manufacturing (e.g., ma-chining setup) needs and must allow the specification andidentification of overconstrained parts.
1.2. Literature review
In this section we review the work that has led to the presentstate of the art in GD&T specification and analysis. Earlywork on tolerancing theory and representation establishedthe important concept of variational geometry. Hillyard and
Nomenclature
Symbol
III
3e0c, cn,uG(£;V)P
Node(P)Arc(P)StartNode(P)EndNode(P)
Meaning
is defined asthere existsbelongs to or is an element ofthe empty setis a subset of (or equal to)the intersection and union of two setsa graph G with E and V as sets of nodes and arcsa single-connected nonlooped graph, also called a
path or a chainthe set of nodes of the path Pthe set of arcs of the path Pthe starting node of the path Pthe ending node of the path Pnode Vj is connected to node Vj through the arc ek.
Braid (1978) investigated how geometric properties of acomponent are affected by dimensional tolerances using arigidity matrix. Through the matrix it can also be deter-mined whether the component is under-, exactly-, or over-defined by a given dimensioning scheme. Gossard et al.(1980) showed that dimensions of a part can be representedsymbolically in a computer-aided design (CAD) system. Linet al. (1981) then showed that generalized dimensional con-straints can be used to modify the geometry of a part. Be-cause a designer modifies geometric models frequently, theirwork supported the use of variational geometry as a designtool (Light & Gossard, 1982).
Top View of the Planar Manipulator
motors- encoder subassemblies
Lo= 11.4 cm
1.2 = 14.0 cm
U = 6.4 cm
L, = 9.5 cm
L3 = 8.3 cm
L5 = 20.3 cm
(a)
Front View of the Motor-Encoder Subassemblv
Motor
Motor Clamp/
Motor-EncoderCoupling ^
OLr~r1
I—
fEncoder Clamp Encoder
mounted to ground
(b)
Fig. 1. (a) Sketch of a planar manipulator where the five-bar linkage is driven by two motors, (b) Detail of the motor-encoder sub-assembly.
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 327
1
00.0:
0.01
0.01
JA
E
B 4-
©00.02 A
00.011D0.01 C
B
connecting-peg
encoder-bole
00.03 A B
O.O1|C|
motor-hote
Fig. 2. Partial geometric tolerancing specifications of the motor-encoder coupling.
A fundamental issue for any GD&T representation schemeis how to represent tolerancing information so that it can beused efficiently. One approach is to embed tolerancing in-formation within a geometric modeling system, such as inthe systems by Requicha and Chan (1986) and by Gossardet al. (1988). Another approach is to separate tolerancinginformation and put it in a systematic representation suchas the tolerance chain used in Bjorke (1989) for handlingdimensional tolerances in a CAD system. We first reviewresearches based on the first approach.
Requicha (1983), from the viewpoint of geometric mod-eling, developed an offsetting theory to define geometrictolerances after ANSI Y14.5 was published in 1976. A tol-erance specification in the theory is a collection of geomet-ric constraints on an object's surface features. The geometrictolerance zone, a region of space, was defined such that atoleranced surface feature is required to lie within the zone(Requicha, 1983, 1993). While conventional location andsize tolerances can be implemented in a geometric modelerbased on Boundary Representations (BReps), Requicha andChan (1986) argued that surface features and associated tol-erances can be implemented in Constructive Solid Geom-etry (CSG) modelers as well. Based on the theory by Requicha(1983), they developed a tolerance representation scheme ina CSG-based solid modeler using VGraph, the variationalgraph. The VGraph represents surface and curve features withtolerance attributes in their data structures in addition to nom-inal geometries.
Recent work on tolerance representation is based on CSG-BRep hybrid geometric modelers. Turner (1987) describeda Constructive Variational Geometry (CVG) for modelinggeometric tolerances. In this approach, model variables areassociated with nominal surfaces in a CSG-BRep hybridmodeler and tolerance variables are transformed into modelvariables to represent variations of associated geometric en-tities. Gossard et al. (1988) demonstrated a prototype forrepresenting dimensions, tolerances, and features explicitly
in a CSG-BRep solid modeler based on variational geom-etry. In their approach a graph called the Object Graph, as-sociated with the solid modeler's topology graph, representsdimensional parameters of a design. Besides binary opera-tions on surface primitives, a relative position operator isused to establish the dimensional parameter showing the re-lationship between a target and datum surfaces. At the sametime Roy and Liu (1988) showed that a CSG-BRep hybriddata structure provides a suitable basis for representing tol-erancing information. The scheme attached tolerance infor-mation to a face list, which links CSG models to BRepmodels, as constraint nodes (Roy et al., 1989). Fundamen-tally, the two schemes by Gossard et al. (1988) and by Royet al. (1989) are equivalent though the implementation dif-fers. Other similar representation schemes for dimensionaltolerances can be found in Yu et al. (1988), Faux (1990),Wang and Ozsoy (1991), and Shah and Yan (1996).
Bernstein and Preiss (1989) discussed a general represen-tation scheme using a constraint network. In the network,coordinate frames of geometric features are modeled as nodesand toleranced geometric constraints are represented as arcs.Although the described scheme was intended for solid mod-elers, the possibility to extend the scheme for product mod-els was also suggested.
On the other hand, tolerance representation schemes havealso been developed that are without reference to any par-ticular geometric modeling solution. Bjorke (1989) used atolerance chain to represent the dimensional relations amongsurface features. Nodes and arcs of the chain are surfacesand toleranced dimensions, respectively. Linear statisticaltolerance stackup can then be performed based on the chain.Notice that the tolerance chain is similar to the constraintgraph used in Bernstein and Preiss (1989). While arcs aremodeled as kinematic transformations in the constraint graph,arcs are modeled as arithmetic equations in the tolerancechain. The concept of tolerance chains can be extended toother geometric tolerances, though it was originally devel-
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

328 J.-C. TsaiandM.R. Cutkosky
oped for dimensional tolerance analysis. A similar represen-tation scheme using a graph can be found in Fleming (1988).
Often, the GD&T scheme of a product is directly relatedto the manufacturing and inspection sequence. It is also rec-ognized that a tolerance representation must support meth-ods for tolerance analysis and synthesis. To this end, effortshave been made to develop a generic representation schemefor product modeling. Sata et al. (1985) used first-order pred-icates to represent dimensioning constraints and extendedthe concept for tolerancing constraints. The representationcan easily establish the relative dimensioning and toleranc-ing constraints among features. Although this scheme pro-vided a unified dimensioning and tolerancing representationfor product modeling and process planning (Kimura et al.,1987), it was difficult to extend the scheme to multidatumtolerances and shape tolerances.
The emerging standards for representing geometric fea-tures with tolerances are reflected in the ISO STEP speci-fication (ISO, 1992). Geometric tolerances in the STEPproduct model are represented as attributes of geometric fea-tures or of dimensions. Binford et al. (1990) noticed thereexist implicit geometric constraints and suggested includ-ing these constraints explicitly in the tolerance graph. Tsaiand Cutkosky (1992) presented a hierarchical product de-composition to derive the tolerance network, a symbolic con-straint graph, from a product model. The network is a unifiedrepresentation for both tolerancing and fitting specifica-tions applied to mating features. Martino (1992) presenteda scheme, called the feature descendant graph to decom-pose a product into parts and features. In comparison to theearlier representation schemes by Bjorke (1989) and by Bern-stein and Preiss (1989), the tolerance network and featuredescendant graph are hierarchical representations and moresuitable for product modeling. However, the feature descen-dant graph involves different representations of features andparts that make it less uniform than the tolerance network.
To summarize, if we consider the previous work on geo-metric tolerances and modeling as a whole, several themesemerge:
1. Tolerances apply to geometric constraints and thus arerepresented as variational classes of geometries.
2. A Symbolic representation provides a useful platformfor using variational geometry in geometry design.
3. Dimensional tolerances on features can be repre-sented as a tolerance graph (or chain) with features asnodes and toleranced dimensions as arcs. The arcs ofthe tolerance graph can be arithmetic equations or ki-nematic transformations, depending on the domain ofapplication.
While these early efforts were vital for establishing the ba-sic geometric and symbolic treatment of tolerances, they weregenerally developed for specific geometric modelers and/ora subset of tolerance types (e.g., dimensional tolerances).
To map smoothly between design specifications and man-ufacturing and inspection processes, we require a genericGD&T representation scheme that can capture the design-er's intent and handle multiple types of tolerances while re-maining independent of any specific geometric modelingchoice. The scheme should also handle individual parts andassemblies in a uniform manner.
In the following sections, we present a scheme for repre-senting GD&T specifications for hierarchical product mod-els as defined in the emerging ISO STEP standards and asfound in modern CAD systems. We begin with classifica-tions and a taxonomy of tolerances that make it easy to uti-lize inheritance of properties and procedures (methods) inobject-oriented class libraries. Proceeding to a systematicGD&T representation scheme, hierarchical models, and re-lated decompositions of a product design is discussed in Sec-tion 3. The hierarchical product model represents a productdesign at different levels of details through part and featuredecompositions. In Section 4 the implications of a productGD&T scheme are investigated, followed by the descrip-tion of a unified scheme for representing the GD&T speci-fications in a feature-based product model. Associatedproperties and possible applications are investigated in Sec-tion 5. Advantages and limitations of this approach, includ-ing validity and ambiguity of the representation scheme andsoundness and completeness of the product model, are dis-cussed in Section 6.
2. CLASSIFICATION OF TOLERANCES
A geometric tolerance, by definition, is the allowable vari-ation in the geometry of a feature or on the relative positionand orientation between features. Although tolerances areknown as variations of geometries, it was early recognizedthat they should be represented as a special class in a CADsystem to perform tolerance analysis and synthesis (Kimu-ra et al., 1986; Requicha & Chan, 1986; Gossard et al., 1988).Therefore, tolerances are treated as variational geometricconstraints (VGCs) in this paper. In this section we inves-tigate their classification in terms of geometric constraints.In each case, a specification is represented as a symbolicentity that can be either an interval or a statistical data type.This arrangement accommodates different tolerance typesto provide a unified representation for design, manufactur-ing, and quality control.
2.1. Conventional tolerances andgeometric tolerances
Traditional tolerancing deals with location and size toler-ances. Such tolerances specify the allowable variations onlocation and size constraints applied to geometric features,such as the relative location between two parallel surfacesor the diameter of a hole. Although conventional tolerancesare well developed and are used widely in engineering de-sign practice, a designer is unable to use them to specify the
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 329
variations of a feature shape that are specifically related tofunctional or behavioral requirements. For example, the de-signer could specify the tolerances on the diameters of ashaft and a hole based on the clearance needed for requiredperformance, however (s)he could not specify how straightthe hole and the shaft must be to ensure their behavior. Geo-metric tolerances, which include form tolerances besides con-ventional ones, are defined in ANSI Y14.5M (1994) and ISO1101 (1983) to solve such problems. Table 1 lists the itemand characteristics of geometric tolerances defined in ANSIY14.5M and ISO 1101.
The major achievements of ANSI Y14.5M and ISO 1101are to define datum reference features, and tolerances ofform, profile, orientation, and runout. The use of tolerancesconcerning location and limit-of-size in the standards iscloser to product functional requirements than that of con-ventional tolerances. Based on the table, an orientation, alocation, or a run-out tolerance limits the variation of thefeature it applies to with respect to a reference datum. Fromthis viewpoint, they can be classified as part of the samecatalogue: the tolerance of location. More generally, toler-ances can be classified as:
(i) tolerances of location,
(ii) tolerances of size, and
(iii) tolerances of form.
Considering tolerances as variations of geometric con-straints, a closer investigation shows that size and form tol-erances are variations applied to the shape of a geometricfeature while a location tolerance (linear or angular) alwaysapplies to one geometric feature and refers to another as adatum feature. This leads to a more generic classificationdiscussed in the following section.
Table 1. Geometric tolerances defined in ANSI Y 14.5Mand ISO 1101
Tolerance Item Characteristics
form tolerances
orientation tolerances
location tolerances
run-out tolerances
straightnessflatnesscircularitycylindricityprofile of a lineprofile of a surfaceparallelismperpendicularityangularitypositioncoaxiality (concentricity)symmetricitycircular run-outtotal run-out
single features
single or relatedfeatures
related features
2.2. Cross-referenced and self-referenced tolerances
Cross-referenced tolerances define variations of relative po-sition while self-referenced ones define variations of a fea-ture shape. In Table 1, location, orientation, and run-outtolerances are classes of cross-referenced tolerance. Con-versely, tolerances of size and form, except profile toler-ances, are classes of self-referenced tolerance. Tolerancesof line and surface profile, however, can be cross-referencedor self-referenced, depending on how they are used. Fig-ure 3 shows a taxonomy of tolerance classes defined inANSI Y14.5M. Note that run-out tolerance, shown as across-referenced tolerance in the figure, can be cross- orself-referenced depending on the usage.
As discussed above, tolerances are classified into cross-and self-referenced categories at the top level. Further clas-sification shows different types of tolerances that can beused by a designer. The links connecting a class and sub-classes in Figure 3 indicate inheritance. For example, par-allelism, perpendicularity, and angularity are subclasses oforientation-tolerance and thus inherit attributes from theclasses of orientation-tolerance, cross-referenced-tolerance,and tolerance. Therefore, a perpendicularity specificationconsists of a unit and a value (e.g., 0.1°) and features it isapplied-to and referenced-to (e.g., & perpendicularity is ap-plied to a hole and referenced with respect to a datum ref-erence frame). In addition, the tolerance specificationinherits procedures and data structures needed to modelthe variation it causes and to propagate the variation (Tsai,1993).
There are two major advantages of such a hierarchicalclassification:
1. Construction of the tolerance representation data struc-tures is clear, unambiguous, and complete.
2. Implementation of analysis methods for tolerances ofthe same branch of the hierarchy is unified. For exam-ple, angularity, perpendicularity, and parallelism areclasses of orientation-tolerance suggesting that toler-ance analysis methods for the three categories can be thesame though their variational models are different.
The classification discussed in this section is based onhow a constraint applies to a geometric feature. However,there remains the question of how to represent the magni-tude of the geometric variation. For this purpose, intervaland statistical forms are commonly used. These will be dis-cussed in the next section along with their relationship tothe geometric constraints they qualify.
2.3. Interval and statistical tolerances
Tolerances are often treated as interval data types in designand inspection. However, it has been argued that statisticaltolerances should be used for design such that they are con-
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

330 J.-C. Tsai andM.R. Cutkosky
OSS-REFEREHCED-TOLERANCE
Fig. 3. Taxonomy of geometric tolerances shows the classification of geometric tolerances while the links between classes/subclassesdenote the inheritance properties and procedures (methods).
sistent with the results of manufacturing and quality control(Evans, 1974). For a product of mass production, parts areoften inspected by random sampling. In such a case, statis-tical models for reliability analysis are suggested. In con-trast, in a critical design all parts are subject to inspection,hence the worst case models, that is, interval tolerancingmodels, should be used to ensure the product quality. Thus,a tolerance representation scheme must be flexible enoughto support both tolerancing types.
In this paper, we use the multiple inheritance approachfor combining the geometric constraints (e.g., position tol-erance) with the representation of the tolerance magnitude(interval or statistical) in a single hierarchical data struc-ture. The taxonomy for different representation types is firstconstructed. As shown in window I of Figure 4, differentrepresentation types, namely interval-type, statistical-type,and basic-type (the type of a value without variation suchas nominal and basic dimensions), are constructed as sub-classes of the generic class representation-type. In design, atolerance specification is an instance of a specific toleranceclass defined in previous discussion. However, the specifi-cation can also be an instance of a specific representationtype. Window I of Figure 4 shows that both position-tolerance-1 and perpendicularity-! are instances of certaintolerance classes. If statistical tolerances are used in the de-sign, both tolerance specifications are also set up as in-stances of statistical-type. A tolerancing specification underthe representation can be either an interval or a statisticaltype, defined by the designer. Such an arrangement pro-
vides the flexibility of using different representation typesfor tolerancing design. The designer can also switch backand forth between statistical and interval forms without re-building the symbolic tolerance network to be discussed inthe following section.
Windows II and III of Figure 4 show the contents of in-terval and statistical representation types. Conversion be-tween different representation types depends on thedesigner's convention. For example, in 6a statistical toler-ancing, the standard deviation of a statistical tolerance spec-ification, cr, is equal to one sixth of the corresponding intervaltolerance value.
3. HIERARCHICAL PRODUCT MODEL
Before proceeding to discuss the individual tolerance rep-resentations in detail in the next section, it is necessary todiscuss the overall assembly and component representa-tion. In this section, a hierarchical representation schemefor product models is discussed. In the representation, fit-ting constraints among parts and geometric constraintsamong features are generalized as geometric constraints(Requicha & Whalen, 1991). A product is decomposed intoparts with connection relations to form the assembly graph(Lee & Gossard, 1985). Parts are further decomposed intofeature with VGCs to construct the tolerance network (77V).The TN differs from the assembly graph in terms of the levelof detail. A TN includes detailed geometric constraints, with
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 331
TOLERANCE |—[CROSS-REFERENCED-TOLERANCE
OBJECT: INTERVAL-TYPESYNONYMS:GENERALIZATIONS: REPRESENTATION-TYPEGROUPS: REPRESENTATIONTYPE: CLASSEdited 2-Dec-S2 14:50.55 PST By: TwiUPPER-BOUND[EXPR]:IOWER-BOUND(EXPR]:OPERATION[LISP]: Argllst: (OBJECT SLOT FACET OPERATION 8REPRESEMTATIONPJSP]: ArgUst: (OBJECT SLOT FACET)
OBJECT: STATISTICAL-TYPESYNONYMS:GENERALIZATIONS: REPRESENTATION-TYPEGROUPS: REPRESENTATIONTVPE: CLASSEdited: 2-Dec-92 14:51:07 PST By: TsaiFRST-MOMENTtltSP]: Argtet: (OBJECT SLOT FACET)SECOND-MOMENT[LISP]: AfQtit: (OBJECT SLOT FACET)MEANfEXPR]:VARIANCE(EXPR]:REPRESENTATK>N|USP|: ArgUst: (OBJECT SLOT FACET)OPERATIONILISP]: Anfiii: (OBJECT SLOT FACET OPERATION &REST STATIS
Fig. 4. A multiple-inheritance tolerance specification inherits the properties and methods from both tolerance class and representa-tion class. The r e p r e s e n t a t i o n - t y p e taxonomy provides the flexibility for using different tolerance types.
associated variations among features while an assemblygraph models connecting relations among parts.
3.1. Part decomposition and the assembly graph
A product can be decomposed into subassemblies and partsfor different purposes such as assembly modeling and pro-cess planning (DeFazio et al., 1990; Requicha & Whalen,1991; Thomas, 1991). Due to different combinations of sub-assemblies, there exist many possible decompositions of aproduct. However, the decomposition at the level of parts isunique because all parts are uniquely defined. A combina-tion of parts with connection relations among them is calledthe assembly graph, an undirected graph with parts as nodesand connection constraints as arcs. Considerable work hasbeen conducted for modeling parts and their relations to rep-resent and use such information in CAD/CAM systems (e.g.,Lee & Gossard, 1985; Turner, 1990; and Wilson, 1992).Konkar et al. (1990) implemented an assembly editor thatautomatically constructs the assembly graph from parts andjoints specified by the designer through interactive graphicwindows. The assembly editor provides kinematic reason-ing based on the assembly graph (Konkar, 1993).
Although the assembly graph reflects the designer's in-tentions regarding functional and behavioral requirementsand can be used for kinematic reasoning (DeFazio et al.,1990), it is a high-level mapping of such requirements and
does not provide enough detail to ensure that requirementssuch as those on accuracy are met. Nor does it detail thedesigner's intentions regarding manufacturing and inspec-tion processes based on the dimensioning and tolerancingscheme and fitting specifications of the product. A featuredecomposition and a tolerance network are discussed in thefollowing section to provide such detailed design informa-tion in conjunction with the assembly graph.
3.2. Feature decomposition and the tolerancenetwork
An assembly is a combination of parts and a part, althoughphysically nonseparable, can be further decomposed intogeometric features. Similar to decomposing an assembly intosubassemblies, there exist different ways to decompose apart into features and aggregate-features or clusters of fea-tures (Cutkosky et al., 1988). In this paper, we will limit thediscussion of features to three types that are commonly usedand important for tolerance analysis: surface features (e.g.,faces), axisymmetric features (e.g., holes), and datum fea-tures that establish DRF.
Combining the part and feature decompositions, a partcan be decomposed into features connected by geometricconstraints, including GD&T specifications. The connec-tion relations among parts are mapped into detailed fittingspecifications applied to matting features of corresponding
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

332 J.-C. TsaiandM.R. Cutkosky
parts. That is, all TNs of parts are connected together byfitting specifications, also a kind of VGC, applied to corre-sponding features. Consequently, the TNTor the entire prod-uct is formed.
Figure 5a illustrates the hierarchical product model, withpart and feature decompositions, shown as vertical arrows inthe figure. At the top, a node represents a product design. Un-der the node is the assembly graph by part decomposition. Thegraph shows that parts, represented as nodes, are connectedby connection constraints, shown as arcs. The graph at thebottom level is the tolerance network mapped from the as-sembly graph through feature decomposition. Features, rep-resented as nodes, decomposed from parts are connected byVGCs, shown as arcs, in the network. Figure 5b shows the re-lationship among the assembly graph, the 77V, and the prod-uct model through part and feature decompositions.
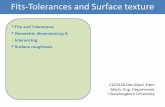
A partial specification of the motor-encoder coupling usedin the planar manipulator example is shown in Figure 6. Win-dow IV is one view of its geometric model. The figure is ascreendump from a feature-based design system (Tsai et al.,1992). The designer inputs features, tolerancing specifica-tions, and the datum reference frame of the part through in-teractive windows, thereby providing the information neededto construct a tolerance network. Then the tolerance networkis automatically generated. Window I shows part of thetolerance network that displays the VGCs applied tothe connecting-peg, motor-hole, encoder-hole, and DRFconstructed by three planar surfaces. The TN shows thatthe designer has located the two holes, motor-hole andencoder-hole with respect to the common DRF using position-tolerance-1 and position-tolerance-2, respectively, for man-ufacturing and inspection purposes. However, the relativeposition between the two holes is of more direct importancefrom a functional standpoint. Therefore, a redundant toler-ance, concentricity-1 has been established. Consequently,there is a loop formed by two paths from motor-hole to theDRF, indicating that this is an overconstrained design. The
constraint-2
Part Dec )mposition
\
^Assembly Graph)
Feature De proposition
V(Tolerance Network)
(a) (b)
Fig. 5. (a) An illustration of a hierarchical product model, and (b) the re-lationship among the product model, the assembly graph, and the toler-ance network.
ramifications of such loops will be discussed in Section 5. Win-dow III is a partial description of the motor-hole feature in theproduct model. Window IV shows a partial taxonomy of fea-tures in the design. It can be seen that the two holes and plane-surfaces 3,18, and 19 are used as reference datums. Therefore,they inherit properties from both specific classes of geomet-ric features (hole and plane-surface) and from the datum-feature class, as shown in Window II.
4. REPRESENTATION OF VARIATIONALGEOMETRIC CONSTRAINTS
The TN described in this paper is a symbolic constraint graph.In the network, a feature is represented as a node while aVGC, that is, a geometric constraint with tolerancing spec-ifications, is represented as an arc connecting the features itapplies to. The frame-based semantic network reflects thedesigner's intentions regarding product function, manufac-turing, and inspection. The scheme accommodates numer-ical and symbolic data types to support tolerance analysisand synthesis.
4.1. Implications of variationalgeometric constraints
Figure 7 shows a simple example of a part with geometrictolerancing. In the figure, surface B is specified to be par-allel to surface A within the allowable variation e. When thedesigner gives such a dimensioning and tolerancing speci-fication, (s)he implies the parallelism between the two fea-tures serves certain functional requirements. While surfaceA is allowed to vary to a certain degree, /, the design con-straint can be interpreted as: "The measured surface B' isparallel to the measured surface A' within allowable varia-tion e." This implies that surface A should be measured be-fore B to determine the specified parallelism. It also suggeststhe same order should be used in manufacturing for consis-tency. A mating specification for an assembly, often speci-fied based on functional requirements, can also be mappedinto corresponding VGCs. In general, a dimensioning andtolerancing scheme implies the following design intents:
• Functional requirements: A dimensioning and toleranc-ing scheme often indicates the importance of the rela-tive position between features or the shape of a feature.In the coupling example shown in Figure 2, the rela-tive position between the two holes and the perpendic-ularity between the connecting-peg and the motor-holeare directly related to the accuracy of the link-tip. Hence,even knowing that the design is overconstrained, thedesigner overspecifies the dimensions and tolerancesbetween them to reflect her/his concern about the func-tion of the manipulator.
• Manufacturing sequence and capacity: A dimension-ing and tolerancing scheme reflects the relative impor-
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

1
NE
XT-
CU
T
Tole
ranc
e N
etw
ork
DlJ
Dla
g (
or C
ON
NE
CTI
NG
-PE
GP
ER
PE
N0I
CU
IAR
ITY
-3P
IAN
E-S
UR
FA
CE
-B
CO
NN
EC
TIN
O-P
EG
CO
NC
EN
TR
ICIT
Y-!
E
NC
OD
ER
-HO
IE
PE
RP
EN
DIC
UlA
RIT
Y-d
PE
RP
EN
DIC
UL
AR
nV
-5
PO
SIT
ION
-TO
IER
AN
CE
-2
/ P
LAN
E-S
UR
FA
CE
-3
> A
PE
HP
EN
DIC
UIA
RIT
Y-2
P
UN
E-S
UR
FA
CE
-IS
[«li
»nw
« M
OTO
R-H
OLE
SV
NO
NV
MS
: /T
7>
iG
EN
ER
ALI
ZATI
ON
S:
HO
LE D
ATU
M-F
EA
TUR
E
\}}i
/G
RO
UP
S: T
R-E
XA
MP
LE M
OT
OR
-EN
CO
DE
R-C
OU
PLI
NG
TV
PE
: IN
DIV
IDU
AL
Ed
ited
: 6-
Apr
-93
17 1
5 12
PD
T
By:
Tsa
iC
VLI
ND
RIC
AL-
SU
RFA
CE
|OB
JEC
T]:C
VLI
ND
RIC
AL-
SU
RFA
CE
-1R
EFE
RE
NC
E-F
AC
EfO
BJE
CT)
: C
UB
E-1
Z-F
-4P
AR
TIO
BJE
CT1
: M
OT
OR
-EN
CO
DE
R-C
OU
PLI
NG
DA
TUM
-FR
AM
E|R
EFE
RE
NC
E-F
RA
ME
J: R
F-S
XIL
INE
AR
-SIZ
E):
0.3
0 in
ches
V[L
INE
AR
-SIZ
E]:
0.3
75 in
ches
RE
FER
EN
CE
-FR
AM
E[R
EFE
RE
NC
E-F
RA
ME
]: R
F-1
5D
IAM
ETE
RIO
IAM
ETE
R|:
0.37
5 [•
0.01
0K-0
.010
] inc
hes
DE
PTH
[LIN
EA
R-S
IZE
]: 1
.00
inch
esT
OO
L-P
AT
HS
IOB
JEC
T]:
TO
OL-
PA
TH-1
GE
OM
ETR
IC-M
OD
ELI
GE
O-M
OD
EL]
: V
AN
TAG
E m
odel
CV
LIN
DE
R-B
OD
V-1
SU
RFA
CE
S(O
BJE
CT)
: C
ON
CA
VE
-CY
LIN
DR
ICA
L-S
UR
FA
CE
-ID
ATU
H-F
EA
TUR
ES
tOB
JEC
T]:
EN
CO
DE
R-H
OLE
, P
LAN
E-S
UR
FAC
E-3
,'L
AN
E-S
UR
FA
CE
-19,
and
PLA
NE
-SU
RF
AC
E-1
8C
ON
CE
NT
R!C
ITV
[CO
NC
EN
TW
CIT
V]:
0.0
2 M
M w
/.t
(EN
CO
DE
R-H
OLE
)P
OS
ITIO
N-T
OLE
RA
NC
E(P
OS
ITK
>N-T
OLE
RA
NC
E]:
0 01
INC
H *
r t
(P
LAN
E-
CV
IIND
RIC
ITV
IFO
RM
-TO
LE
BA
MC
E1:
OO
I IN
CH
PE
RP
EN
DIC
ULA
RIT
V[P
ER
PE
ND
ICU
LAR
ITV
]: 0
.05
DE
GR
EE
w r.
t (P
LAN
E-S
IT
OI F
PftM
r^F-
UFT
UIfH
MC
fTM
l Irt
B IF
PT
I1
(Enc
oder
-Hol
e^)
5 I
Fig
. 6.
Par
tial
spe
cifi
catio
ns o
f th
e m
otor
-enc
oder
cou
plin
g.
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

334 J.-C. Tsai and M.R. Cutkosky
MODELING DESIGN SPECIFICATION
I-B-I l//lelAI
Physical Surface B
Physical Surface A
Design Specification Physical Part
Fig. 7. A tolerancing model for design.
tance of features and the order for manufacturing them.For example, "Feature B is located with respect to theDRF D" suggests that datum surfaces of DRF D shouldbe machined first to use them for indexing the part whenmachining or inspecting feature B.
• Quality control requirements: It is commonly recog-nized that inspections have to conform with the partdimensioning and tolerancing scheme to ensure the as-sembled product satisfies the functional requirements.This suggests that the inspection sequence should fol-low the product GD&T scheme.
It can be concluded that the GD&T specifications havedirect implications for product function, manufacturing, andinspection. Therefore, a representation scheme should serveall three activities.
4.2. Tolerance representation scheme
As discussed in Sections 1 and 2, a representation schememust be able to support the following requirements:
1. to represent tolerancing and fitting specifications asvariations of geometric constraints applied to fea-tures,
2. to provide symbolic and dual-linked (bidirectional) datastructures for reasoning,
3. to construct a taxonomy with inheritance for toleranc-ing specifications, and
4. to support part modeling.
These requirements lead to a data structure that is able torepresent an object, such as a feature or a geometric con-straint, for use in product modeling. Furthermore, the datastructure is required to represent attributes of an object, forexample, variations of a geometric constraint. Such attributesneed to provide links to other objects that form a graph. In-terpretation of such a graph should be flexible for differentdomains of interest. Finally, links of the data structure must
be able to support inheritance associated with a hierarchicalstructure among objects.
Among many knowledge representation schemes, theframe data structure fulfills these requirements. Because thegraph needs to carry design intents for different domains, asemantic network is the most suitable model (Sowa, 1992).In the following section, we show how a frame-based se-mantic network can be used for the representation scheme.
4.3. Frame-based semantic network
A frame is a data structure that represents a certain class ofobjects with associated attributes, called slots. Frame struc-tures can be constructed using object-oriented program-ming technique. Details of frame representations are not inthe scope of this article. Interested readers are suggested torefer to bibliographies on Artificial Intelligence.
Figure 8 shows how the class of hole features in a feature-based product model can be represented as a frame. As shownin the figure, a hole has geometric constraints on location(x, y), size (depth, diameter), orientation {parallelism, per-pendicularity), and shape (cylindricity, straightness etc.), aswell as fitting constraints (mating-condition). Other slots inthe frame are for different purposes, for example the create-geometric-model slot is a method embedded in the framefor creating the corresponding geometric model of a holeusing a solid modeling program. These geometric con-straints, also represented as frames, contain attributes of tol-erances representing the allowable variation. Self-referencedconstraints of a feature apply to the feature boundary whilecross-referenced constraints serve as a link among features.
Using the frame-based programming technology to theTN, Figure 9 shows the overall data structure of the toler-ance network. There are four classes of frames in the net-work. The ideal (or nominal) feature, the VGC, the featureboundary, and the physical feature, that is, the fabricatedfeature. While the physical feature can be viewed as the "asmanufactured" version of the nominal feature, the nominalfeature can be viewed as the idealized interpretation of themeasurements of a physical feature. A nominal feature andits corresponding boundary are also mutually connected. A
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 335
•oTOE-JECTEPITOR MSKR HOLEOBJECT: HOLESYNONYMS:GENERALIZATIONS: CONCAVE-FEATUREGROUPS: TN-SYMBOLS FEATURETYPE: CLASSEdittd: 2-Dec-S2t3:i4:06PST By: TsaiBOUNDING-BOX[USP]: Arglist: (OBJECT SLOT FACET)CENTRAL-AXB[LINE]:CONCENTRiaTV[EXPR]:CREATE-GEOMETRIC-MODEL[LISP]: A'glist: (SELF SLOT FACET &OPTIONAL N MCREATE-TOOL-PATHS[USP1: Arglist: (OBJECT SLOT FACET)CVLINDRKAL-SURFACqOBJECT]:CVUNDnCITV[EXPR):DATUM-FRAME[REFERENCE-FRAME]:DEPTH[EXPR]:DIAMETERJEXPRJ:DIRECTIONILISP]: * g i s t : (HOLE SLOT FACET)DOCUMENT ATION|TEXT]: Ac ylindrtealAjonlcal depressionMATINO-CONDITION[OBJECT]:PAHAUEUSMIEXPR]:PERPENMCULARITVIEXPR]:POSITION-TOLERANCE[EXPR]:ROUNDNESS(EXPR]:STARTMG-FACE(OBJECT]:STRAIGHTNESSPEXPR]:SURFACE-flNISH[EXPfl|:TAPER-ANOLE[EXPR):THROUGH/8UND(EXPR|:XIEXPR]:VJEXPR1:
Fig. 8. A frame representation for the class of hole features.
conditions (e.g., maximum material condition (MMC)), andfitting modifiers, such as ISO-fit grade, are represented asattributes of those VGCs.
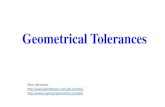
Semantically, a TN is a graph with mixed directed and un-directed arcs. An arc of a cross-referenced tolerance starts fromthe node of the interpreted, or nominal, feature it refers to andends at the node of another interpreted feature it applies to.An arc of a self-referenced tolerance, on the other hand, startsfrom the node of an interpreted feature and points to the nodeof the corresponding feature boundary. An arc of a fitting con-dition, unlike a tolerancing arc, applies to the nodes of bound-aries of fitting features without explicit direction. Suchsemantics are consistent with customary product dimension-ing and tolerancing schemes and fitting specifications. In themanipulator example of Figure 10, the El-Hole on the Motor-Encoder-Coupling is positioned with respect to the datum ref-erence frame MEC1-DRF according to the designer'sdimensioning and tolerancing specifications.
Figure 10 is a display showing the TN of the planar ma-nipulator. Note that tolerance networks of individual parts,such as the one for the coupling surrounded by dash lines,are connected by mating constraints to form the 7W for theproduct.
VGC can apply to either nominal features or the featureboundaries, depending on the nature of the constraint.
4.4. Graph model for the tolerance network
A TN is a symbolic geometric constraint network with vari-ational attributes associated with the constraints. Geomet-ric constraints of the TNas discussed in Section 3.2, includeself-referenced and cross-referenced geometric constraints.Notice that among cross-referenced geometric constraints,location constraints are semantically directed but fitting con-straints are undirected. Hence, the TN can be defined asfollows.
DEFINITION 1. [Tolerance network].A Tolerance network, TN, is a symbolic constraint graph
G such that
TN=G{V;E)
where
V = {vj\i = 1,..., n} is the set of features;
and
E = {e\i = 1,..., m} is the set of VGCs. •
Such a definition is borrowed from the theory of graphs(Harary, 1969). The connectivity of a TN, Connectivity (TN),depends upon how the designer specifies tolerances and fit-ting conditions among features. Because VGCs are repre-sented as frames, tolerance modifiers, such as material
5. PROPERTIES OF AND REASONING ABOUTTHE NETWORK
5.1. Semantics of variational geometric constraints
A VGC, either a GD&T or a fitting specification, impliesthe allowable tolerance zone. A 2D tolerance zone causedby a location tolerance and a size tolerance can be evalu-ated based on the variation of dimensions. Then the 3D tol-erance zone can be established using Minkowski Sums ofthese 2D elementary zones. Although there exist fast algo-rithms for constructing the 3D tolerance zone when the 2Delementary zones are all convex, the procedure is compu-tation intensive. Moreover, it is difficult to adapt the ap-proach for other kinds of geometric tolerances.
In a feature-based CAD system, each feature has an as-sociated local coordinate frame. A cross-referenced geomet-ric constraint is used as a transformation between featureframes. For example, the distance constraint between twofeatures is treated as a translational transformation betweenthem. A self-referenced geometric constraint, on the otherhand, is the transformation between the local frame and thefeature boundary. A fitting specification, as it applies to fea-ture boundaries, is then treated as the transformation amongthe boundaries of fitting features, but it also causes varia-tions of the relative position of the feature frames. In otherwords a VGC and the geometric constraint it is associatedwith can be modeled as differential motion of the nominalgeometry limited by the VGCs.
It is useful to borrow a concept developed in robotics inwhich variations are described as differential transforma-tions. Such models encompass six degrees of freedom
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

336 J.-C. Tsai and M.R. Cutkosky
PhysicaiJe.aju.re
IjteaUeaturs.
Physicalfeature-C
interpreted-as
Nominalfeature-B
with-boundary '
ygjnjsoMgeometriccgnstrsmt
Clearancemodel
model-of.Z''
Clearance |tion J. specification^
attribute-of\Ay ^ variation
( Mating jI constraint J
mate-with
apply-to ' apply-to
,, mate-with
Feature-Aboundary
physical-entity
Nominalfeature-C
has^ X ,/S.
' ' ref-by *
apply-to
attribute-of
Cross-referencedgeometric constraint
y^variation referencev/Tolerance
specification
Self-referenced^geometric constraint,
Tolerancemodel
boundary-of has
Feature-Bboundary
int]apply-to
boundary-of
with-boundary
Feature-Cboundary
(a)
Mating.constraint.
Feature-AJ- Feature-B |-constraint
Feature-C
(b)
Fig. 9. (a) Data structures of the tolerance network, and (b) the corresponding simplified representation for the 77V.
(DOFs) in Cartesian space, making it easier to construct thetolerance zone.
PROPOSITION 1. [Vdriational model]:A geometric constraint is a constraint on a geometric fea-
ture over the DOFs it applies to. The error caused by thevariation of a geometric constraint is a differential motionof the nominal geometric feature over the DOFs that theconstraint applies to. •
The model is consistent with other parametric variationalgeometric models and conforms with the "offset" model pro-posed by Requicha (1983). However, the model is definedin such a way that the variational model can be directlymapped to corresponding geometric constraint in Cartesianspace. The offset model was proposed from the viewpointof describing the geometric tolerance zone, while this modelis proposed from kinematic viewpoint for tolerance analy-sis. Compared to the variational geometric models dis-
cussed in Lin et al. (1981) and the variational kinematic mod-els in Bernstein and Preiss (1989), this model is more use-ful for kinematic error analysis because a differential motionis directly related to a kinematic description. Furthermore,the model is consistent with other variational models usedin robotics calibration, sensor-based modeling, and ma-chine tool accuracy, such as Kirchner et al. (1987), Hutch-inson and Kak (1990), Slocum (1992), and Ziegert et al.(1992). The notation DOF{e) is used to represent the de-gree^) of freedom that the VGC e, an arc in the TN, appliesto. Detail of variational kinematic models for different typesof geometric tolerances can be found in Tsai et al. (1995).
Recall that geometric features in a TN are connected bycross-referenced VGCs. For error analysis between featuresof interest, a partial TN is constructed with features of inter-est as the starting and the ending nodes. For example, the par-tial TN shown in Window I of Figure 6 is part of the productTN shown in Figure 10. To perform error analysis through-out a TN, it is necessary to define a loop and a path first.
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 337
Motor-Encoder-Coupling
mating condition concentricity
sSurfacey V Surface J V Surface,
Fig. 10. The tolerance network of the planar manipulator.
A graph with the same starting and ending node forms aloop. However, a tolerancing or a fitting specification ap-plies to certain DOFs of a feature, therefore a loop existsonly when there is more than one geometric constraint ap-plied to the same DOF.
DEFINITION 2. [Loop].A loop in a TN is a subgraph with the same starting and
ending node such that there exist more than one arc over thesame DOF. In other words,
such that
and
L = G(E;V)
StartNode(L) = EndNode(L)
3eue2&Arc(L)
DOF(e2) + 4>
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

338 J.-C. Tsai and M.R. Cutkosky
A loop is often related to overconstrained design and canbe detected by graph traversal. VGCs that connect the samefeatures over different DOFs can be merged into a singlearc in the graph model. A path is a nonlooped chain withfeatures of interest as the starting and ending nodes. For-mally, a path can be defined as follows.
DEFINITION 3. [Path].A path P is a single-connected nonlooped subgraph of a
TN. That is,
P = G(E;V)
such that
Connectivity(P) = vi+i\i = ! , . . . , « — 1},
and
StartNode(P) * EndNode{P)
where
V = {vj 11 = 1, ... , n} is the set of features;
and
E = {et\i = 1, ... ,n - 1} is the set of VGCs. •
As an example, the TN for the motor-encoder couplingshown in Window I of Figure 6 contains a loop and can bedecomposed into two paths.
The path is important for tolerance analysis. As dis-cussed earlier, a VGC is modeled as a frame transformationamong feature nodes. Thus, the transformation of the end-ing feature with respect to the starting feature in a path isthe product of transformations along the path. Because tol-erance analysis is not the emphasis of this paper, interestedreaders can refer to Tsai (1996) for detail.
5.2. Reasoning about overconstrained designs
A design is overconstrained, that is, overdimensioned or over-toleranced, when there exist redundant constraints. Hence,an overconstrained design is defined as a design with re-dundant tolerancing specifications. Such redundant speci-fications are often found in engineering design, usually dueto requirements arising from different perspectives. For ex-ample, the two holes in the motor-encoder coupling shownin Figure 6 are overtoleranced due to manufacturing andfunctional considerations.
For a CAD system to reason about "redundant toleranc-es," it is necessary to define what redundancy is with re-spect to tolerancing. Following Proposition 1, a feature canbe well-constrained or overconstrained according to the fol-lowing definition.
DEFINITION 4. [Well-, under- and overconstrainedfeature].
A geometric feature is well-constrained with respect toanother datum if and only if that for each DOF there existsone and only one path between the feature and the datum. Afeature is underconstrained if and only if that for a DOF ofthe feature there does not exist any path between the featureand a datum. Conversely, a feature is overconstrained if andonly if there exist two or more different paths between thefeature and the datum, applying VGCs over the same DOF.A design is well-constrained if and only if all geometric fea-tures in its TNaie well-constrained. A design is under- and/oroverconstrained if there exist such underconstrained and/oroverconstrained features in its 77V.
In other words, features / , and f2 are overconstrained ifand only if the following statement is true.
3PUP2CTN
/, = StartNodeiP^Jy = StartNode(P2),
f2 = EndNode(Pl),f2 = EndNode(P2),
and
such that
Arc(P)) 0 Arc(P2) = <f>
3e, £ Arc(Pt), 3e2 E Arc(P2), and
DOF(ei) n DOF(e2) * <f>
Therefore, a design with a perpendicularity and a two-datum position tolerances applied to a feature is not consid-ered to be an overtoleranced because there is no overlap inthe degrees of freedom that the tolerancing specificationsapply to. An immediate consequence of the definition is thefollowing propositions regarding the relationships betweenisolated nodes and underconstrained features and between aloop and overconstrained features.
PROPOSITION 2. [Isolated node and underconstrained fea-ture]:
An isolated node in a TN is an underconstrained feature.This is a direct result of Definition 4 because an isolated
node is not connected to any other node meaning the fea-ture is not constrained. Although this case is not likely toappear in a CAD system, it could happen in a manually drawnblue print. •
PROPOSITION 3. [Loop and overconstrained features]:Features in a loop are overconstrained.Proof of this proposition involves Definition 3 and is
shown in the Appendix. Following Proposition 3 and Def-inition 4, an overconstrained design can be identified by thefollowing proposition. •
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 339
PROPOSITION 4. [Detecting overconstrained design]:A product design with a loop in its TN is an overcon-
strained design. In other words,
A design is overconstrained <=> 3 a loop L C TN
Proof of this proposition can be found in the Appendix. •
Errors caused by tolerances and joint clearances are dif-ferent in nature. Clearances play dual roles in error analy-sis. A clearance introduces errors due to variations causedby contact conditions. However, in an overconstrained de-sign, a carefully designed clearance could also compensatefor errors caused by manufacturing tolerances to avoid ki-nematic binding. For tolerancing, it is necessary to treat er-rors caused by tolerances and by clearances separately inorder to identify critical and dominant specifications in anoverconstrained design (Tsai, 1993).
6. CONCLUSION AND DISCUSSION
A representation scheme has been developed to describeGD&T constraints for parts and assemblies in this paper.The scheme represents design geometric features and VGCsamong them as a frame-based semantic network, called the7W. The TN, a symbolic constraint graph, represents the de-signer's intentions regarding functional, manufacturing, andquality control requirements associated with a productGD&T scheme and fitting specifications. Therefore, it pro-vides a uniform platform for use in design, manufacturing,and quality control. Such a symbolic representation pro-vides a unified representation for using different types oftolerance specifications. Such an arrangement is useful forworking at different levels of detail in a design, such as rea-soning about overconstraining through graph traversal with-out going to the detail of tolerance analysis, not to mentionthat symbolic representation also provides the capability forparametric design.
Besides representing the constraints among features ex-plicitly, the 7W also exploits inheritance of attributes fromgeneric parent classes such that generic properties of ele-ments in the network, including nodes and arcs, can be di-rectly derived from inheritance. Furthermore, the TN isassociated with the decomposition of a hierarchical productmodel, as shown in Figure 5. Therefore, it implicitly repre-sents a product design in detail with support for reasoningat higher levels, such as kinematic analysis based on theassembly graph.
In addition to the practical capabilities summarized above,the 7W also has the formally useful properties of validity,unambiguity, soundness, and completeness. The 77V is validbecause it always corresponds to at least one product model(Requicha & Whalen, 1991). To put it in another way, a TNis a direct decomposition from a product model, meaning itis a valid representation if and only if the correspondingproduct model is valid (e.g., topologically consistent). The
TAf is unambiguous if tolerances are well defined. Knowingthat there exists ambiguity of tolerance definitions in ANSIY14.5M, mathematical models of tolerances are defined inASME Y 14.5.1 (1994). In this paper, tolerances are exclu-sively and unambiguously defined by a TN that corre-sponds to a unique product model. That is, the representationis unambiguous under each interpretation covered in thisarticle.
We have also discussed the soundness and completenessof the decompositions of a product model shown in Fig-ure 5. A TN is a direct decomposition from a product modeland semantically well defined, that is, a TN is logically de-rived from its corresponding product hierarchy. Therefore,the decompositions are sound. To discuss the completeness,a complete definition of part, feature, connection relation,and VGCs play an important role. In part decomposition,an assembly is first decomposed into parts. Although therecan be different product-subassembly-part decompositions(DeFazio et al., 1990), the parts of a product are unique,implying the completeness of the decomposition in the gs-sembly graph. The next step of decomposing parts into fea-tures is again not unique, due to the existence of aggregatefeatures. However, all possible TNs for a part can be de-rived from the possible feature decompositions. Therefore,the TN is deterministic and the representation is complete.
Finally, we observe that to use the TN and associated rep-resentations for tolerance analysis and synthesis, a set ofmathematical models for describing and accumulating theerrors caused by each geometric tolerance must be used.
ACKNOWLEDGMENTS
Funding for the research was supported by DARPA, U.S.A. underONR Grant N-00014-88-K-0620 and by the National Science Coun-cil, Taiwan, R.O.C. under contracts NSC83-0422-E-005-007 andNSC84-2212-E-005-017.
REFERENCES
Akella, P., Siegwart, R., & Cutkosky, M.R. (1991). Manipulating with softfingers: Contact force control. Proc. of the 1991 IEEE Int. Conf. onRobotics and Automation, 652-657.
ANSI Y14.5M (1994). Geometric dimensioning and tolerancing.ASME Y 14.5.1 (1994). Mathematical definition of dimensioning and tol-
erancing principles.Bernstein, N.S., & Preiss, K. (1989). Representation of tolerance informa-
tion in solid models. Proc. of the 1989 ASME Design Technical Conf,37-48.
Binford, T., Frants, L., Cutkosky, M.R., & Tsai, J.-C. (1990). Representa-tion and propagation of tolerances for CAD/CAM systems. Proc. ofthe 1FIP WG5.2 Workshop on Geometric Modeling.
Bjorke, O. (1989). Computer-Aided Tolerancing, 2nd ed. ASME Press, NewYork.
Cutkosky, M.R., Tenenbaum, J.M., & Muller, D. (1988). Features in process-based design. Proc. of the 1988 ASME Int. Computer in EngineeringConf, 557-562.
DeFazio, T.L., Edsall, A.C., Gustavson, R.E., Hernandez, J.A., Hutchins,P.M., Leung, H.-W., Luby, S.C., Metzinger, R.W., Nevins, J.L., Tung,K.K., & Whitney, D.E. (1990). Prototype of feature-based design forassembly. Proc. of the 1990 ASME Design Technical Conf, 9-16.
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

340 J.-C. Tsai and M.R. Cutkosky
Evans, D.H. (1974). Statistical tolerancing: The state of the art part I: Back-ground. J. Quality Technol. 6(4), 188-195.
Faux, I.D. (1990). Modelling of components and assemblies in terms ofshape primitives based on standard dimensioning and tolerancing sur-face features. In Geometric Modeling for Product Engineering, pp. 259-275. Elsevier Science, Amsterdam, North-Holland.
Fleming, A. (1988). Geometric relationships between toleranced features.Artif. Intell. 37(1-3), 403-412.
Gossard, D.C., Zuffante, R.P., & Sakurai, H. (1988). Representing dimen-sions, tolerances, and features in MACE systems. Comput. Graphicsand Applications 8(2), 51-59.
Gossard, D.C., Light, R.A., & Lin, V.C. (1980). The use of symbolic di-mensioning in computer aided design. Annals of the CIRP 29, 567-569.
Harary, F. (1969). Graph theory. Addison-Wesley, Reading, MA.Hillyard, R.C., & Braid, I.C. (1978). Analysis of dimensions and toler-
ances in computer-aided mechanical design. Computer-Aided Design10(3), 161-166.
Hutchinson, S.A., & Kak, A.C. (1990). Spar: A planner that satisfies op-erational and geometric goals in uncertain environments. Al Magazine
ISO (1992). Product Data Representation and Exchange (STEP) Part 1:Overview and fundamental principles.
ISO-1101 (1983). Geometric tolerancing: Toleranced characteristics andsymbols—examples of indication and interpretation.
Kimura, F., Suzuki, H., Ando, H., Sata, T., & Kinosada, A. (1987). Varia-tional geometry based logical constraints and its application to productmodelling. Annals of CIRP 36(1), 65-68.
Kimura, F., Suzuki, H., & Wingard, L. (1986). A uniform approach to di-mensioning and tolerancing in product modeling. Proc. of CAPE'86,165-178.
Kirchner, H.O.K., Gurumoorthy, B., & Prinz, F.B. (1987). A perturbationapproach to robot calibration. Int. J. Robotics Res. 6(4), 47-59.
Konkar, R. (1993). Incremental kinematic analysis and symbolic kine-matic synthesis of mechanism. PhD Dissertation. Stanford University.
Konkar, R., Cutkosky, M.R., & Tenenbaum, J.M. (1990). Toward an as-sembly editor for concurrent product and process design. Proc. of theIF1P WG5.2 Workshop on Geometric Modeling.
Lee, K., & Gossard, D.C. (1985). A hierarchical data structure for repre-senting assemblies: Part 1. Computer-Aided Design 17(1), 15-19.
Light, R., & Gossard, D.C. (1982). Modification of geometry models throughvariational geometry. Computer-Aided Design 14(4), 209-214.
Lin, V.C, Gossard, D.C, & Light, R.A. (1981). Variational geometry incomputer aided design. Comput. Graphics 15(3), 171-177.
Martino, P. (1992). Simplification of feature based models for toleranceanalysis. Proc. of 1992 ASME Int. Computer in Engineering Conf.
Requicha, A.A. (1983). Toward a theory of geometric tolerancing. Int. J. Ro-botics Res. 2(4), 437-464.
Requicha, A.A. (1993). Mathematical definition of tolerance specifica-tions. Manufact. Rev. 6(4), 269-275.
Requicha, A.A., & Chan, S.C. (1986). Representation of geometric fea-tures, tolerances, and attributes in solid modelers based on construc-tive geometry. J. Robotics and Automation RA-2(3), 156-166.
Requicha, A.A., & Whalen, T.W. (1991). Representations for assemblies.In Computer-Aided Mechanical Assembly Planning (de Mello, L.S.H.and Lee, S., Eds.), Chap. 2, pp. 15-39. Kluwer Academic, Boston.
Roy, U., Banerjee, P., & Liu, C.R. (1989). Design of an automated assem-bly environment. Computer-Aided Design 21(9), 567-569.
Roy, U., & Liu, C.R. (1988). Feature-based representational scheme of asolid modeler for providing dimensioning and tolerancing informa-tion. Robotics Computer-Integrated Manufact. 4(3/4), 335-345.
Sata, T., Kimura, F., & Fujita, T. (1985). Designing machine assembly struc-ture using geometric constraints in product modelling. Annals of CIRP34(1), 169-172.
Shah, J., & Yan, Y. (1996). Representation and mapping of geometric di-mensions from design to manufacturing. Proc. of the 1996 ASME De-sign Engineering Technical Conf, 96-DETC/DAC-1481.
Slocum, A.H. (1992). Precision machine design. Prentice-Hall, Engle-wood Cliffs, NJ.
Sowa, J.F. (1992). Semantic networks. In Encyclopedia of Al (Shapiro, S.,Ed.), Vol. 2, 2nd ed., pp. 1493-1511. John Wiley & Sons, New York.
Thomas, F. (1991). Graphs of Kinematic constraints. In Computer-AidedMechanical Assembly Planning (de Mello, L.S.H. and Lee, S., Eds.),Chap. 4. pp. 81-110. Kluwer Academic, Boston.
Tsai, J.-C. (1993). Tolerance reasoning for concurrent CAD/CAM systems.PhD Dissertation. Stanford University.
Tsai, J.-C. (1996). Geometric tolerance analysis for mechanism design. Proc.of the 1996 ASME Design Engineering Technical Conf, 96-DETC/DAC-1053.
Tsai, J.-C, & Cutkosky, M.R. (1992). Tolerance reasoning for concurrentdesign. Proc. of the 2nd Int. Conf. on Automation Technol., 41-47.
Tsai, J.-C, Guo, D.-N., & Cheng, K.-D. (1995). Variational kinematic mod-els for geometric tolerances and fittings. Proc. of the 4th Nat. AppliedMechanisms and Robotics Conf, AMR 95-107.
Tsai, J.-C, Konkar, R., & Cutkosky, M.R. (1992). Issues in incrementalanalysis of assemblies for concurrent design. In Artificial Intelligencein Design '92 (Gero, J., Ed.), pp. 617-635. Kluwer Academic, Dor-drecht, The Netherlands.
Turner, J.U. (1987). Tolerances in computer-aided geometric design. PhDDissertation. Rensselaer Polytechnic Institute.
Turner, J.U. (1990). Relative positioning of parts in assembly using math-ematical programming. Computer-Aided Design 22(7), 394-400.
Wang, N., & Ozsoy, T.M. (1991). A scheme to represent features, dimen-sions, and tolerances in geometric modeling. J. Manufact. Sys. 10(3),233-240.
Wilson, R.H. (1992). On geometric assembly planning. PhD dissertation.Stanford University.
Yu, Y.C., Liu, C.R., & Kashyap, R.L. (1988). A variational solid model formechanical parts. Proc. of the USA-Japan Symp. Advances in FlexibleAutomation and Robotics, 237-244.
Ziegert, J.C, Olson, D.G., & Datseris, P. (1992). Description of machinetool errors using screw coordinates. J. Machine Design 114, 531-535.
APPENDIX
Al. Proof of propositions 3 and 4
Al.l . Proof of proposition 3: Given a loop L, fromDefinition 3, it follows that
3c|, e2 G L, andei # e2
such that
DOF(e2)
Furthermore, L can be decomposed into two exclusive sub-graphs G, and G2 such that ex G Arc{Gx), e2 G Arc(G2),and Arc(G,) C\ Arc(G2) = <f>, as shown in Figure Al.
For a feature/[ G Node(Gx), there exists another featuref2 G Node(G2) such that two exclusive paths P, and P2 areformed with starting node/, and ending node/2; and e, GArc(Px), e2 G Arc(P2) as in Figure Al. Hence, according toDefinition 4, the two features/, and/2 are overconstrained.
Similarly, for each feature/2 G Node(G2), it can be provedin the same way that/2 is overconstrained. •
A1.2. Proof of proposition 4: We first prove the " i fstatement ( ^ ) of the proposition. That is, if a design isoverconstrained then there exists a loop in its 77V.
A. If a design is overconstrained, from Definition 4, thereexist features/,,/2, arcs e,, e2, e, + e2, and paths P, ,P2, such that
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.

Geometric tolerances in design 341
O node— arc - - > path
Fig. Al . A loop L can be decomposed into two exclusive subgraphs G,and G2. Features in each subgraph are overconstrained.
/, = StartNode(P,),fi = StartNode{P2),
f2 = EndNode(Px)J2 = EndNode(P2),
e, £ Arc{Px), e2 € Arc(P2),
and
DOF(ei) 0 DOF{e2) * </>.
Let P3 be the inverse path of P2, therefore,
/, = EndNode(P3),f2 = StartNode(P3),
Arc(P3) = Arc(P2),Node(P3) = Node(P2).
Then let
L = />, U P3.
It follows that
e\, e2 E Arc(L)
(Al)
(A2)
(A3)
(A4)
(A5)
by Equations (Al), (A3) and (A4), we have
StartNode(L) =/ , = EndNode{L).
That is, L is a loop by Definition 2, Equations (A5), and(A2). This proves the "if" part. We then prove the "only-if" part (<=) of Proposition 4.
B. Given a loop L C TN, features in the loop are over-constrained by Proposition 3. Then by Definition 4,the design is an overconstrained one due to the exis-tence of overconstrained features in the loop. •
Jhy-Cherng Tsai is an Associate Professor in the Depart-ment of Mechanical Engineering at National Chung-HsingUniversity, Taiwan. He received his Ph.D. in MechanicalEngineering and M.Sc. in Computer Science from StanfordUniversity in 1993 and 1990. He also holds an M.Sc. and aB.Sc. degree in Mechanical Engineering from National Tai-wan University, Taiwan. Dr. Tsai had five years experiencein industry before joining the Center for Design Research atStanford in 1986. His research interest includes tolerancingengineering, concurrent engineering, and design methodol-ogy and tools.
Mark R. Cutkosky is the Charles M. Pigott Professorand Associate Chair for Design and Manufacturing in Me-chanical Engineering at Stanford University. He is also aco-director of the Stanford Integrated Manufacturing Asso-ciation (SIMA). He joined Stanford in 1985 after workingfor several years in the Robotics Institute at Carnegie Mel-lon University and as a design engineer at ALCOA, in Pitts-burgh, Pennsylvania. He received his Ph.D. in MechanicalEngineering from Carnegie Mellon University in 1985. Dr.Cutkosky's research activities include computational sup-port for concurrent product and process design and dex-trous manipulation with robotic hands and tactile sensing.He is an NSF Presidential Young Investigator and a formerAnderson Faculty Scholar at Stanford. He is a member ofASME, IEEE, SME and Sigma Xi.
Downloaded from https://www.cambridge.org/core. 28 Dec 2020 at 13:41:05, subject to the Cambridge Core terms of use.