Pickup and delivery routing with hub transshipment across flexible time periods for improving dual...
17
Pickup and delivery routing with hub transshipment across flexible time periods for improving dual objectives on workload and waiting time Yon-Chun Chou a,b,⇑ , Yao-Hung Chen b , Hui-Min Chen c a Institute of Industrial Engineering, National Taiwan University, Taipei, Taiwan, ROC b Department of Mechanical Engineering, National Taiwan University, Taipei, Taiwan, ROC c National Taiwan University Hospital, Taipei, Taiwan, ROC article info Article history: Received 29 January 2013 Received in revised form 21 September 2013 Accepted 9 November 2013 Keywords: Pickup and delivery routing Transshipment Policy design Flexible time period Stochastic routing analysis Multiple objectives abstract In contrast to developing routing algorithms, operational policy design of courier services is addressed in this paper with the objective of reducing both courier workload and cus- tomer waiting time. A square root law of tour length is verified, extending the literature. A new policy of hub transshipment across flexible time periods is evaluated by mean-value analysis of stochastic routing. Boundary conditions on arrival rate, territory size and trans- shipment probability in which the new policy outperforms a traditional periodical routing policy are derived. Finally, the effectiveness of the new policy is demonstrated by applying to a large hospital case. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction Pickup and delivery (P&D) routing problems have been widely studied in ambulance service, courier service and trans- portation logistics. In most problem settings, their mathematical programming models take into consideration the con- straints of vehicle capacity, tour time, waiting time, time window, and precedence relation. Routing decisions typically include clustering of customers, customer-vehicle assignment, and P&D sequencing. More sophisticated models allow for transshipment, which permits a customer to be picked up by one vehicle and transshipped to another vehicle. For the P&D routing problems and their modeling, a few survey papers have been published (Berbeglia et al., 2007, 2010; Cordeau et al., 2008; Parragh et al., 2008). Most research efforts have been devoted to developing solution algorithms and meta- heuristics, given that routing problems are NP-hard. The objective is either to achieve responsive service or lean capacity reserve, or to find best tradeoffs between them. P&D routing models can be classified as either static or dynamic, depending on the availability of job information at the time of routing planning. In static models, a set of P&D jobs is given as input. In dynamic models, jobs continue to arrive even after the P&D service has commenced. Therefore, static models are used for a single period of finite duration and dynamic models are used for one continuous time period. There has been very little study on multi-period routing problems. In papers which incorporate multiple periods, routing decisions span multiple time periods because jobs are either postponable 1366-5545/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.tre.2013.11.005 ⇑ Corresponding author. Address: 1, Section 4, Roosevelt Rd., National Taiwan University, Institute of Industrial Engineering, Taipei 106, Taiwan, ROC. Tel.: +886 2 3366 9501; fax: +886 2 2362 5856. E-mail address: [email protected] (Y.-C. Chou). Transportation Research Part E 61 (2014) 98–114 Contents lists available at ScienceDirect Transportation Research Part E journal homepage: www.elsevier.com/locate/tre
Transcript of Pickup and delivery routing with hub transshipment across flexible time periods for improving dual...

Transportation Research Part E 61 (2014) 98–114
Contents lists available at ScienceDirect
Transportation Research Part E
journal homepage: www.elsevier .com/locate / t re
Pickup and delivery routing with hub transshipment acrossflexible time periods for improving dual objectives on workloadand waiting time
1366-5545/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.tre.2013.11.005
⇑ Corresponding author. Address: 1, Section 4, Roosevelt Rd., National Taiwan University, Institute of Industrial Engineering, Taipei 106, Taiwan, R+886 2 3366 9501; fax: +886 2 2362 5856.
E-mail address: [email protected] (Y.-C. Chou).
Yon-Chun Chou a,b,⇑, Yao-Hung Chen b, Hui-Min Chen c
a Institute of Industrial Engineering, National Taiwan University, Taipei, Taiwan, ROCb Department of Mechanical Engineering, National Taiwan University, Taipei, Taiwan, ROCc National Taiwan University Hospital, Taipei, Taiwan, ROC
a r t i c l e i n f o
Article history:Received 29 January 2013Received in revised form 21 September 2013Accepted 9 November 2013
Keywords:Pickup and delivery routingTransshipmentPolicy designFlexible time periodStochastic routing analysisMultiple objectives
a b s t r a c t
In contrast to developing routing algorithms, operational policy design of courier servicesis addressed in this paper with the objective of reducing both courier workload and cus-tomer waiting time. A square root law of tour length is verified, extending the literature.A new policy of hub transshipment across flexible time periods is evaluated by mean-valueanalysis of stochastic routing. Boundary conditions on arrival rate, territory size and trans-shipment probability in which the new policy outperforms a traditional periodical routingpolicy are derived. Finally, the effectiveness of the new policy is demonstrated by applyingto a large hospital case.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Pickup and delivery (P&D) routing problems have been widely studied in ambulance service, courier service and trans-portation logistics. In most problem settings, their mathematical programming models take into consideration the con-straints of vehicle capacity, tour time, waiting time, time window, and precedence relation. Routing decisions typicallyinclude clustering of customers, customer-vehicle assignment, and P&D sequencing. More sophisticated models allow fortransshipment, which permits a customer to be picked up by one vehicle and transshipped to another vehicle. For theP&D routing problems and their modeling, a few survey papers have been published (Berbeglia et al., 2007, 2010; Cordeauet al., 2008; Parragh et al., 2008). Most research efforts have been devoted to developing solution algorithms and meta-heuristics, given that routing problems are NP-hard. The objective is either to achieve responsive service or lean capacityreserve, or to find best tradeoffs between them.
P&D routing models can be classified as either static or dynamic, depending on the availability of job information at thetime of routing planning. In static models, a set of P&D jobs is given as input. In dynamic models, jobs continue to arrive evenafter the P&D service has commenced. Therefore, static models are used for a single period of finite duration and dynamicmodels are used for one continuous time period. There has been very little study on multi-period routing problems. In paperswhich incorporate multiple periods, routing decisions span multiple time periods because jobs are either postponable
OC. Tel.:

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 99
(Angelelli et al., 2009) or have extended deadline (Wen et al., 2010). In this paper, a courier routing problem of multiple timeperiods of flexible length with transshipment between time periods is addressed. The problem arises in a courier serviceproblem of a large hospital. We will next describe the service problem before presenting relevant literature survey.
The hospital that we studied is a full-service hospital with 24 clinical departments and more than 200 clinical rooms in asprawling campus. More than eight thousand patients visit the hospital per day on average. After visiting a particular clinic,some patients are referred to other departments for further diagnosis or treatment. Before a patient can be examined by asecond physician, some medical materials of the patient must be transported to the second clinical department through acourier service. Because of inefficiency in P&D services, patients sometimes have to wait at the second department for theirmaterials to be delivered. Patient waiting time is considered an important quality measure but because the hospital campusis very large there are frequent cases of excessive waiting by patients. Because the number of couriers is constrained, thechallenge is to improve patient waiting time by designing creative routing solutions without increasing the courier staff. Thisproblem has four characteristics: (1) large service territory, (2) uncertain P&D locations, (3) limited resource of couriers and(4) dual objectives on patient waiting time and courier utilization. In routing problems, as in many other problems, multipleobjectives are inherently difficult to achieve. We approach this problem by redesigning operational policy. The following lit-erature review will focus on salient characteristics and innovative policy design for the P&D routing problems.
We use the term operational design to refer to decision-making on operational policy or strategy. It is a task that precedesthe development of routing algorithms. Akin to operational design is the task of designing control policy, which is intensivelystudied in dynamic routing. We will use the words requests, jobs and demands interchangeably to refer to customer requestsof P&D services.
There are two solution approaches to dynamic P&D routing problems (Berbeglia et al., 2010). The first approach is to solvea static problem each time a new request arrives. The second approach is to solve a static problem at the beginning to obtainan initial solution and then, with each new request, to revise the tour by using heuristics of inserting and rearranging routesegments. Because job arrivals are uncertain, associated with the issue of routing is the decision of vehicle prepositioning inanticipation of future arrivals. In the dynamic environment, the most prominent strategy is related to that of waiting. Mitro-vic-Minic and Laporte (2004) compared three waiting strategies with the drive-first strategy based on predetermined P&Droutes. With the drive-first strategy, a vehicle will depart for the next service from its current location at the earliest possibletime. In contrast, the wait-first strategy will require the vehicle to depart at the latest possible time. The other two waitingstrategies are variations of the wait-first strategy. The dynamic waiting strategy calls for adopting the drive-first strategywithin a service zone but switching to the wait-first strategy for jobs across service zones. The last strategy is an advancedmodification of the dynamic waiting strategy. An upper limit is imposed on the time that the vehicle is allowed to wait. Theirsimulation study showed that the three waiting strategies outperform the drive-first strategy on tour length in most casesand that the advanced dynamic waiting strategy seems to be the most promising.
Pureza and Laporte (2008) evaluated the effect of a waiting strategy and a request buffering strategy in dynamic P&Dproblems with time window constraints and uncertain travel time between each pair of locations. Both strategies arepostponement strategies. While the waiting strategy is a policy that delays the assignment of vehicles to their next servicedestination, the buffering strategy is a policy for aggregating non-urgent requests before they are served in a continuous sub-tour. Three quality measures were used: the number of lost requests, the number of routes and total travel distance. Theirsimulation results demonstrate the advantage of the two strategies over the traditional drive-first strategy.
Transshipment provides opportunities for multiple vehicles to collaborate in P&D services. By adding flexibility to routing,it has positive effects on reducing the waiting time of the customers and the travel cost of the vehicles (Cruijssen et al., 2007).Nakao and Nagamochi (2008) did a worst case analysis of the maximum travel cost that can be saved when a transshipmentpoint is introduced. They showed that the bounds are in proportion to the square root of the number of routes and the squareroot of the number of requests. Cortés et al. (2010) developed detailed mathematical formulations and a branch-and-cutalgorithm based on Benders decomposition for the P&D problem with transshipment. They compared the computational effi-ciency of their algorithm with a straight branch and bound algorithm. By experimenting with small problem instances, theyconcluded that there exist some configurations in which transshipment can be more profitable and they further conjecturedthat transshipment would be effective under high demand conditions. Mitrovic-Minic and Laporte (2006) applied and eval-uated the policy of transshipment on a P&D problem with time window constraints. By using heuristics and simulation withstylized data, they showed that the policy reduces the total travel distance when requests are uniformly generated in theplane. The benefit is more significant when the problem size is large and requests are clustered. In another application withstylized data, Lin (2008) evaluated the benefits of transshipment in local courier service of a multi-national logistics firm.Each request has a pickup time window and a delivery deadline at the depot. The objective is to minimize the sum of fixedand operation costs of courier service. The flexibility of transshipment leads to a cost savings of approximately 10–20%,depending on operation modes.
Information about future arrivals can be exploited to improve routing decisions (Haughton, 2008). Sáez et al. (2009)developed an adaptive control framework to model the dynamic P&D problem by using a predictive state-space represen-tation for vehicle load and departure time. The merit of their modeling approach was validated by using a particle swarmoptimization algorithm through a simulated numerical example. Mes et al. (2010) used a pricing and auction mechanismto solve the P&D problem with time window constraints in a multi-agent system. Individual vehicles bid on new jobs ina second-price auction. Both the direct cost of inserting a job and its impact on future opportunity cost are considered.Simulation was used to evaluate the benefits of pricing opportunities compared to simple pricing strategies in various

100 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
market settings. Larsen et al. (2002) analyzed the effect of arrival dynamism on the performance of routing heuristics. Thedynamism is defined as the ratio of dynamic requests over the total number of requests. They applied the approach of sto-chastic analysis by constructing functional relationship between performance measures and the degree of dynamism. Theyfound that the nearest neighbor heuristic uniformly outperforms other policies studied.
In the literature, P&D problems in multiple time periods have received very little attention. Athanasopoulos and Minis(2011) addressed an appointment-based courier service problem in which some service requests must be fulfilled in spec-ified periods while others can be fulfilled within a multi-period horizon. They proposed a method for assigning service re-quests taking into account expected routes over a rolling horizon. In this paper, we also address a P&D problem of multipleperiods. But, time periods have flexible length. The salient idea is to have multiple couriers collaborate through transship-ment across flexible time periods to improve both workload and waiting time. This idea is probable since workload could bereduced with transshipment and reduced workload in turn could lead to an increase in service frequency and a reduction inwaiting time. But the plausibility and its conditions will need a formal analysis.
This paper presents a model for analyzing transshipment collaboration of multiple couriers with flexible time periods. Forbrevity of terminology, we call the total time that a customer spends in the system the sojourn time. Sojourn time includeswaiting time and tour time. In P&D applications that involve passengers, waiting time or sojourn time is usually consideredthe most important criterion. In other applications, route length or work time is usually considered the prime criterion ofoperation efficiency. Sojourn time and resource utilization are not unrelated but are conflicting objectives. A contributionof this paper lies in an explicit treatment of the tradeoffs between sojourn time and workload.
The rest of this paper is organized as follows. In Section 2, a problem of P&D service by multiple couriers over a large ter-ritory is defined. The current operation policy and a new policy design are described. The new policy design calls for flexibleperiod length and hub transshipment across time periods. In Section 3, the tour length as a function of job quantity is derivedby using simulation and regression. In Section 4, analytical results are presented for the applicability of the new policy. InSection 5, simulation is used to compare the two policies by using stylized data of a large hospital. Finally, conclusionsand discussions can be found in Section 6.
2. Problem description
An efficient approach to the P&D service will have direct benefits on reducing patient waiting time and doctors’ idle time.The latter benefit can be explained by examining the background processes of doctor scheduling and appointment schedul-ing. Because physicians are the most important human resource in the hospital, doctor’s scheduling takes precedence overappointment scheduling. A day is divided into a number of sessions of fixed or variable length and doctors are scheduled forthe defined sessions. Doctor scheduling is periodic and the frequency is weekly or monthly. Doctor scheduling usually takesinto consideration doctors’ preference and factors such as vacation plan and equipment availability.
Appointment scheduling in health care is very diverse in problem types and is still an active research area (Cayirli andVeral, 2003; Gupta and Denton, 2008). In a recent review, Gupta and Denton (2008) explain that primary care, specialty careand hospital services have unique features that give rise to different challenges. Arrival and service time variability, patientand provider preference, and available information technology are the main complicating factors. In appointment schedul-ing, a doctor’s session is divided into a number of time slots and a number of patients are assigned to each time slot. All pa-tients who are assigned to a time slot are supposed to arrive at the beginning of the slot. To accommodate unscheduledpatients whose arrivals are uncertain, some time slots are deliberately left open. The number of patients assigned to a timeslot is called the block size. Block size can be fixed or variable. Block size, nominal service time per patient, slot size, and thesize of the first block are typical parameters of the appointment rule (Cayirli and Veral, 2003).
In our problem setting, the patients who request P&D services are walk-ins for the doctors at the second clinic. The re-quests cannot be pre-scheduled. By expediting the delivery through a better policy, patients become eligible for the opentime slots at an earlier time and their eventual waiting time will be less. Doctors will also benefit because the chances ofidling in open time slots will be less. In the practice of the case study hospital, a doctor must treat all arriving patients beforehis/her session is closed. If the delivery is inadvertently delayed beyond the nominal ending time of the session, the doctormust extend his work hour.
The general P&D problems have many variants. We consider a P&D service problem in which a large service territory isdivided into multiple regions, each served by a courier. All couriers are stationed at a central depot. Couriers depart from thedepot for each service tour and must return to the depot at the end of the tour. Each service request has an origin and a des-tination. The locations of the origin and the destination are random. To summarize, the problem addressed in this paper hasthe following characteristics (or premises):
(1) A large service territory is divided into a number of regions. This will be called a cluster configuration in the nextsection.
(2) Service requests follow a Poisson process of arrival and they are uniformly distributed in the territory. The origin anddestination of a job might be in different regions or the same region.
(3) The service policy is not a dynamic type. Services are not provided immediately after they are requested. Instead, ser-vice requests are batched.

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 101
(4) Transshipment takes place at the depot. Jobs to be transshipped are exchanged among couriers at the depot.(5) The patient waiting time problem has a unique feature. In some manufacturing environments, special tooling must be
provisioned before manufacturing operations can commence. Tooling is auxiliary to machine but essential. Specialtooling, such as photo masks used in photolithographic processes, could also be scarce and expensive. The fabricationscheduling of tooling complicates the problem of machine scheduling. The P&D service problem is analogous to theprovisioning of essential, auxiliary resources. It is not a standalone routing problem but is part of a larger serviceproblem.
This study is motivated by the challenges of meeting dual objectives on courier workload and customer sojourn time. Thecourier staff is constrained; improving service response time by increasing the courier staff is precluded. The research ap-proach taken by this study is not by developing advanced routing algorithms. Instead, the focus is on re-designing operationpolicies. Three operation policies have been identified:
(1) Policy 0 (dynamic routing): A courier is assigned to each arriving service request. Because the service territory is largeand demand is random, this policy will require a high level of courier staff. Due to its high cost, this policy is not con-sidered feasible.
(2) Policy 1 (periodical routing): Requests are accumulated within a period and then dispatched to couriers in batch. Thecouriers pick up all orders that originate in their assigned regions and do all the deliveries. Since delivery destinationsmight span all regions, each courier is likely to travel a long distance. The time period must be made sufficiently largeso that all couriers can return to the depot in time before the commencement of the next period. The service frequencyis low and tour time is long. Policy 1 is very common in practice and is well studied in static routing models.
(3) Policy 2 (hub transshipment with flexible time periods): The key operational change of this policy, as compared to pol-icy 1, is that couriers’ deliveries are restricted to their own duty regions. Jobs which are destined for other regions arebrought back to the depot and are delivered by another courier in the next period. Jobs in three consecutive time peri-ods are involved in each tour. The jobs to be picked up in time period n actually arrived in time period n � 1. They waitto be batched after arrival. This waiting time will be called the batching time. If both the pickup location and deliverylocations of a job are in the same region, the job will be serviced by a courier in time period n. If the delivery location isdifferent from the pickup location, the job is picked up in time n, but is brought back to the depot and delivered byanother courier in time n + 1. Thus, the arrival, pickup and delivery of a cross-region job will span three time periods.
Policy 2 saves couriers from making lengthy excursions from their duty region. On average, the tour length is reduced.(This effect will be more significant when the whole territory is larger.) After all couriers have returned to the depot, the nexttour can commence after exchanging transshipped jobs. Therefore, the time bucket can be flexibly reduced or adjusted. How-ever, one will certainly wonder if courier workload is increased or decreased under this policy. (They make shorter but morefrequent tours.) If it is increased, the policy might not be acceptable by the courier staff unless additional compensation isarranged. One will also wonder if the sojourn time will increase or decrease. (The delivery of some fraction of jobs will bedeliberately delayed by one period, owing to transshipment.) This policy has two opposite effects on waiting time. A reduc-tion in period length implies more frequent services and shorter batching time. These benefits apply to all jobs. However,extra waiting time will incur for some of the jobs. These two questions on workload and sojourn time form the core ofthe research question addressed by this paper.
Changes at the policy level normally have larger impact and risk than changes in routing algorithms. Before a policychange is adopted by an organization, its economic benefits must be proven. However, without the policy in place, its ben-efits are difficult to assess. This dilemma calls for a methodology for proof-of-concept. Policy 2 is a new policy design. Itsproof of concept is based on mean value analysis and simulation in two phases.
Mean value analysis is commonly used in queuing analysis and manufacturing system design. Although job arrivals aredynamic, we will apply the method of mean-value analysis for two reasons. First, policy design is not a routine decision. Thebenefits of a policy should be evaluated over a long horizon. If the average performance, along with some robustness anal-ysis, of a new policy is predicted to outperform an existing policy, the new policy is deemed economically feasible. Second,deviations from the mean value can be left to be coped with by dynamic control or other reactive measures in actual oper-ation. Endowed with actual data of a job set, dynamic control normally can enhance the performance predicted by meanvalue analysis. But, dynamic control requires different methodologies and is not in the scope of this paper. Nevertheless,we will discuss dynamic control in Section 6.
We choose to use tour length as the measure for resource use. For variable period length, courier utilization will changewith period length and therefore is not an appropriate measure. Tour length is fundamental. Tour time can be derived fromtour length. We will use tour length, tour time and courier workload interchangeably in discussion.
Our proof of concept has two parts: theoretical derivation (Section 4) and simulation (Section 5). Theoretical derivation isbased on stochastic routing in which jobs are uniformly distributed. However, in practical applications jobs are not likely tobe uniformly distributed. For example, job flow between some clinics is more likely than between other clinics and customerlocations are not uniformly distributed over the territory. In Section 5, field data of distance matrix and service request prob-abilities of the hospital is used in simulation to generate random jobs. The simulation compliments the analytical results.

102 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
They represent two phases of the proof-of-concept of the new policy. Theoretical derivation requires input information oftour length as a function of job quantity. This is first analyzed in Section 3.
3. Tour length function and distribution
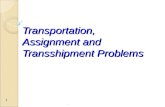
The main decision variable of policy 2 is the length of time period. The length determines the quantity of jobs that areaccumulated for each service tour. It is well understood that the efficiency of routing is dependent on the total numberor the density of jobs. The higher the number of jobs served per unit time or unit length of tour, the larger the economiesof scale (EOS). In this section, the tour length as a function of job quantity is derived from simulated data and regression.This function, embodying the EOS effect, is an input to policy evaluation in the next section. A generic service territory con-figuration as shown in Fig. 1 is used in this paper. In the configuration, three unit circles represent the duty regions of threecouriers. The depot is located at the geometric center of the three circles.
For N points that are uniformly and independently scattered in a connected region of area A, the expected tour length, D,can be derived as:
D � / �ffiffiffiffiffiffiffiANp
; as N !1 ð1Þ
where / is a constant and for a Euclidean distance metric it is equal to 0.75 (Daganzo, 1984). For small N, the formula holdsvery well for circular and square areas but under predicts the tour length for zones of elongated shape. For rectangular zones,Daganzo (1984) analytically derived the following formula by using a swath to swipe through the points.
D � / � dl2 ffiffiffiffiffiffiffiANp
ð2Þ
where d is the density of the points and l is the length of the shorter side of the rectangle. The value of / is expressed as afunction of dl2. For zones with dl2 greater than 4, the value of / is approximately a constant of 0.9.
The method used to derive Eqs. (1) and (2) is not based on combinatorial optimization of routing. But, in another study Eq.(1) is also obtained from the optimal tours for random Traveling Salesman Problems with N cities uniformly distributed overa rectangular area (Gent and Walsh, 1996). It is very interesting to note that these studies, as well as the work of Nakao andNagamochi (2008), consistently show the tour length D to be approximately proportional to N1/2. However, the authors didnot assign much significance to it. We will call this relationship between D and N the square root law of tour length. We willcome back to this point in the concluding section.
In this study, we analyze the tour length function for the territory configuration of Fig. 1 for a number of reasons. First,P&D routing problems are more constrained than general routing problems. A job can only be delivered after it has beenpicked up. The tour length is therefore necessarily longer than without such a constraint. It would be interesting to knowif the square root formula still offers good approximation for P&D problems. The second reason is based on practical consid-erations. For the hospital that is studied, the territory shape in which jobs are scattered does not resemble a circle or a rect-angle. The locations of jobs are clustered in several regions. We would argue that P&D services in most cities have similarcharacteristics of the territory. Most cities are composed of several sub-cities which are separated by parks, rivers, hillsand other spaces in which no P&D jobs arise. The third reason is that our problem includes the cross-region probability.Our model explicitly includes two types of jobs: intra-region and inter-region. It would be interesting to know if the squareroot formula is still valid under the influence of job reassignment between couriers.
We would like to offer our reason for selecting a territory with 3 clusters as in Fig. 1. A territory with 2 clusters resemblesa rectangle in the outer perimeter. A territory with 4 or more clusters also resembles a rectangle or circle. If we have to pick
Fig. 1. A generic P&D service territory configuration.

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 103
just one configuration for this study, the configuration of Fig. 1 would be distinct from the territory shape that has been typ-ically dealt with in the literature, i.e., rectangular and circular.
The first task of policy comparison is to construct a tour length model for varying batch size (or job quantity). In the lit-erature, operation and control policies are usually studied by using stochastic routing analysis. Job arrival is typically as-sumed to follow a Poisson process and pickup and destination locations are uniformly distributed in space (Swihart andPapastavrou, 1999; Mes et al., 2010). In this study, the tour length model is constructed by following the convention of sto-chastic routing analysis (Larsen et al., 2002), and by using simulation in the following procedure. The purpose is to constructfunctional relationships between tour length and job batch size.
(1) Generate random jobs from the generic territory configuration of Fig. 1. Jobs that are picked up and delivered in thesame region are called same-region (SR) jobs. Jobs that are delivered out of their pickup regions are called cross-region(CR) jobs. The fraction (p) of CR jobs is treated as a parameter.
(2) Apply the Nearest Neighbor (NN) heuristic to obtain solution routes. The precedence relation of picking up beforedelivering a job is enforced. The NN heuristic is usually used in the research of vehicle routing problems and has beenshown to produce relatively good performance in the dynamic traveling repairman problem (Bertsimas and Van Ryzin,1991) and the stochastic P&D routing problem (Swihart and Papastavrou, 1999). Larsen et al. (2002) considered bothcriteria of travel distance and average waiting time in a dynamic routing problem. They found that, on average, the NNheuristic performs uniformly better than three other policies studied.
(3) Steps 1 and 2 are repeated 5 times for each batch size. The total number of data point is 200.(4) Apply regression on 200 data points to obtain a functional relationship between average tour length and batch size.
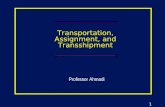
The simulation results are shown in Fig. 2. The function fSR is a route length model for job sets that contain only SR jobs.That is to say, it is obtained from jobs within a unit circle. The function fWT is a route length model for job sets that containboth SR and CR jobs. For instance, the case of p = 1 indicates that all jobs are CR jobs and p = 0.1 indicates that 10% of the jobsare CR jobs.
Data in Fig. 2 seems consistent with logical expectation. The fitted curves, not shown in the figure, are concave andincreasing in batch size. By applying regression analysis, the following power functions, where q is the batch size, are ob-tained for the four curves.
fWTðqÞ ¼ a1qc1 ¼4:3840 � q0:5174; if p ¼ 1:0 ðR2 ¼ 0:931Þ4:3480 � q0:4971; if p ¼ 0:5 ðR2 ¼ 0:939Þ4:1040 � q0:4942; if p ¼ 0:1 ðR2 ¼ 0:941Þ
8><>: ð3Þ
fSRðqÞ ¼ a2qc2 ¼ 3:0258 � q0:4884; ðR2 ¼ 0:925Þ ð4Þ
where the subscript WT stands for whole territory and SR stands for same region. For convenience of analysis, we will treat qas a real-valued variable, q P 1. In these formulas both a1 and c1 are dependent on p. But, for clarity of presentation, we donot write a1(p) and c1(p) because the transshipment fraction p is treated as a parameter, not a random variable. The functionfSR is at a level lower than fWT, as fSR is for a smaller service region than fWT. That is, fSR(q) 6 fWT(q). In theoretical derivationwork of Section 4, specific values of the coefficients are not used, except the relationships a2 < a1 and c2 < c1 < 1, which oper-ationalize the condition fSR(q) 6 fWT(q). Note that the exponents c1 and c2 are very close to 0.5, confirming the square rootlaw.
Fig. 2. Simulated data for constructing route length functions.

104 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
In stochastic routing analysis, a tour is composed of a number of segments, which are generated from random points. Weconjecture that the length of P&D tours is normally distributed. We used simulation to validate this conjecture. The mini-mum number of P&D requests is one, which requires a tour of two nodes (n = 2q). The simulation settings are r = 1, andp = 0.5. The number of experiment replications is set at 30, as t-tests are to be applied. Denote the number of service requestsas q. Fig. 3 summarizes the simulation results of tour lengths L1 and L2 for q = 3, 4, 5 and 6. Both Kolmogorov–Smirnov testand Shapiro–Wilk normality test cannot reject the normality hypothesis (using data in Table A.1 of the appendix).
Proposition 1 (based on q = 3, 4, 5 and 6 and p = 0.5.). With Poisson arrival of service requests, (a) the tour length is normallydistributed; and (b) policy 2 brings about a lower mean and variance of tour length than policy 1.
Supporting evidences:
(a) This proposition is supported by the normality test on simulation results (Fig. 3 and Table A.1).(b) Applying policy 2 will result in shorter tours with smaller variance since the requests are from a smaller territory than
policy 1. This is supported by the t-test and F-test data in Fig. 3 and Table A.1.
Proposition 1 is stipulated for up to 6 P&D jobs, or alternatively, for up to 12 nodes. This range of jobs is sufficient for theapplication of hospital courier services of this paper. On a side note, the proposition is plausible for the cases of more jobs.We did not prove this general stipulation, but we would offer some reasoning. In the problem setting of stochastic routing, atour is made up of a random number of tour segments of random length. Let Y be the sum of a random number (N) of i.i.d.random variables X 0is. It has been proven by Robbins (1948) that if N is asymptotically normal then Y is asymptotically nor-mal. Also, Poisson distribution is known to approximate normal distribution when its parameter value is large. Therefore, ifjob arrivals are Poisson with sufficient intensity, the number of tour nodes will approximate a normal distribution. Then, bythe results of Robbins (1948), tour length is asymptotically normal.
4. Performance evaluation and comparison
In this section, analytical results for comparing policies 1 and 2 are presented. Performance evaluation for individual cou-riers and for synchronized couriers is presented in Sections 4.1 and 4.2, respectively. The total sojourn time include tourtime, work time and sorting time. Tour time and work time are considered in Sections 4.1 and 4.2. In Section 4.3, the sortingtime is considered.
The sojourn time and work time can be estimated by using tour length functions derived the previous section. Besides theradius r, our analysis includes two more parameters: job arrival rate k and cross-region probability p. The probability p is nottreated as a random variable, but a parameter. The probability of job flow from one clinic to another is rather stable. Theperiod length b is a decision variable. It is also called time bucket size and has a policy subscript i, i 2 {1, 2}. The courier speedv appears in the analysis. But it will become clear that it is just a scaling parameter for relating tour length to tour time. Nota-tions related to the performance measures are:
µ=5.87 ; =0.55cv=0.094
L1
µ=9.70 ; =1.11cv=0.114
µ=6.35 ; =0.57cv=0.090
µ=6.92 ; =0.94cv=0.136
L2
µ=10.11 ; =1.53cv=0.151
µ=11.48 ; =1.90cv=0.166
µ=7.98 ; =1.16cv=0.145
µ=8.96 ; =0.96cv=0.107
1.638
1.628
1.947
1.746
1 / 2
q=6
q=5
q=4
q=3
t-test:t=15.293Sig.=0.000
F-test:F=8.895Sig.=0.004
L2 - L1
t-test:t=14.706Sig.=0.000
F-test:F=8.303Sig.=0.006
t-test:t=9.752Sig.=0.000
F-test:F=4.855Sig.=0.032
t-test:t=8.587Sig.=0.000
F-test:F=6.591Sig.=0.013
Fig. 3. Analysis of tour length normality.

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 105
Li(q): tour length under policy i. Also expressed as Li(kbi).Ti: sojourn time per job under policy i.
The batch size equals to the total number of jobs that arrive during a period. For policy 1, the tour length can be obtaineddirectly from the tour length function fWT:
L1 ¼ fWTðkb1Þ � r ð5Þ
where r accounts affine transformation for non-unit circle of radius r. Following policy 2, each courier will give p fraction ofjobs to other couriers and receive an equal amount from other couriers as jobs are uniformly distributed in all regions. There-fore, the batch size is kb2. The route length is given by function fSR:
L2 ¼ fSRðkb2Þ � r ð6Þ
For a time bucket of b, a job will spend an average time of b/2 waiting for the next delivery to commence. This is thebatching time. Also, on average, a job will stay on a delivery tour for one half of the tour time, due to the uniform distributionassumption on job location. For policy 1, the average sojourn time is approximately:
T1ðb1Þ �12
b1 þ12
L1=v ¼12
b1 þ12
fWTðkb1Þ � r=v ð7Þ
For policy 2, there are two types of jobs to consider. In each trip, a courier will pick up both SR and CR jobs, deliver the SRjobs, and deliver the CR jobs transshipped from other couriers, but does not deliver CR jobs that originate in his/her dutyregion. Due to the uniform distribution assumption, the quantity of jobs that a courier gives to other couriers will equalto the quantity of jobs that he receives from other couriers. Thus, the number of jobs that a courier must service within aperiod remains the same under both polices. In our mean-value analysis, no jobs are given a higher priority than other jobs.The average tour time for any job equals to 1
2 fSRðqÞ approximately, where q is the number of jobs. In practice, it is logical todeliver CR jobs first, since these jobs arrived two periods before the current period. However, this particular rule is not in-cluded in the analysis of average waiting time under policy 2. This issue is related to dynamic control and will be discussed inSection 6.
The fraction of CR jobs is p and that of SR jobs is 1 � p. The sojourn time T2 is a weighted average of the sojourn times ofthese two types of jobs. The delivery of CR jobs will be delayed by one more period, as compared to SR jobs. Thus,
T2ðb2Þ �12
b2 þ b2 þ12
fSRðkb2Þ � r=v� �
� pþ 12
b2 þ12
fSRðkb2Þ � r=v� �
� ð1� pÞ
¼ 12
b2 þ b2pþ 12
fSRðkb2Þ � r=vð8Þ
Both Li and Ti are functions of the time bucket decision variable bi.
4.1. Performance evaluation for individual couriers
In this subsection, we compare the performance of two policies for the case of individual couriers. For a policy to be fea-sible, the bucket size b must be greater than or equal to the tour time. Otherwise, couriers would not be able to make it backto the depot before the commencement of the next tour. The following relationships must hold:
b1 P L1=v ¼ fWTðkb1Þr=vb2 P L2=v ¼ fSRðkb2Þr=v ð9Þ
Alternatively, the relationships can be conveniently expressed in equality form as b1 ¼ fWTðkb1Þr=v þ e1 andb2 ¼ fSRðkb2Þr=v þ e2, where ei is the slack and ei P 0. By substituting fWT(kb1), it is obtained that
b1 P a1kc1 bc1
1 r=v :
After re-arranging terms, a feasible domain for b1 is given by:
b1 P ða1kc1 r=vÞ1=ð1�c1Þ � b1
Similarly, for policy 2, b2 P ða2kc2 r=vÞ1=ð1�c2Þ � b2.
Since both Li and Ti are increasing functions of the time bucket b, it is optimal to choose the minimum bi for the bucketsize decision variable bi. That is, the slack ei = 0.
Proposition 2 (performance model for individual couriers). Policy 2 will outperform policy 1 in average sojourn time if thefollowing inequality condition is satisfied.
k > ð1þ pÞð1�c1 Þð1�c2Þ
c1�c2 ac2�1
c1�c21 a
1�c1c1�c22 � ðv=rÞ � ~k

106 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
Proof. From Eq. (9), the feasible sojourn times (Eqs. (7) and (8)) can be written as:
T1ðb1Þ ¼12
b1 þ12
fWTðkb1Þ � r=v ¼ fWTðkb1Þ � r=v þ12e1
b1 P b1
T2ðb2Þ ¼12
b2 þ b2pþ 12
fSRðkb2Þ � r=v ¼ ð1þ pÞfSRðkb2Þ � r=v þ12e2
b2 P b2
For the same batch size q, fWT(q) is at a level higher than fSR(q) as shown in Fig. 2. The two functions do not intersect, except atq = 0. However, when p is sufficiently large, T1(b1) and T2(b2) will intersect owing to the multiplier 1 + p in T2(b2). (It is at theintersecting point the relative advantage of the two policies is reversed. This relationship will be illustrated with an exampleshortly.) Both sojourn time functions are monotonically increasing in bucket size. To compress the sojourn time, the mini-mum bucket size should be chosen under both policies. This is equivalent to setting ei = 0. For any given k and p, the min-imum sojourn time is obtained at bi. By substituting b1 and b2,
T1jb¼b1¼ fWTðkb1Þ � r=v ¼ a1k
c1 ða1kc1 r=vÞc1=ð1�c1Þr=v ¼ ða1k
c1 r=vÞ1=ð1�c1Þ
T2jb¼b2¼ ð1þ pÞfSRðkb2Þ � r=v ¼ ð1þ pÞða2k
c2 r=vÞ1=ð1�c2Þ
Both functions are also monotonically increasing in the arrival rate k (and batch size). They intersect at a certain value of k forsome qualified p. For policy 2 to have a lower sojourn time than policy 1, it is required that T2(b2) < T1(b1). After simplifica-tion, the inequality can be reduced to
k > ð1þ pÞð1�c1 Þð1�c2 Þ
c1�c2 a�ð1�c2 Þc1�c2
1 a1�c1
c1�c22 � ðv=rÞ ð10Þ
The right-hand side stipulates a threshold for k. Denote it as ~k. h
Following policy 2, the workload for couriers will always be smaller since couriers do not make excursion trips acrossregions. Policy 2 would outperform policy 1 in sojourn time when the arrival rate is greater than ~k. With a large arrival rate,policy 1 will necessitates a large time bucket. Although the delivery of cross-region jobs is postponed to the next period un-der policy 2, reduction in courier workload will have a positive effect on shortening the time bucket. Postponement appliesonly to CR jobs, but shortened time bucket will benefit all jobs. Overall, proposition 2 shows that the positive effect of short-ened bucket size outweighs the negative effect of postponement when k P ~k. Policy 2 calls for flexible bucket size. A proce-dure to determine a suitable bucket size is explained by using Fig. 4.
Fig. 4 is obtained for the parameter values of r = 1, k = 1, p = 0.5 and v = 1. It can be seen that the workload under policy 2 isalways smaller than the workload under policy 1 for all bucket size settings (dotted curves). In the figure, the intersection ofa workload curve and the 45� line determines a smallest feasible value for a bucket size. (The time bucket must be greaterthan or equal to the workload.) Therefore, the points W1 and W2 demarcate the lower limits of feasible bucket size for pol-icies 1 and 2, respectively. The corresponding sojourn times are S1 and S2, by reading off the sojourn time functions.
In Fig. 4, the point W2 gives a lower limit at bl for the time bucket. An upper limit bu is determined from the sojourn timefunction by using the sojourn time of S1 as the functional value. The rectangular shaded area is constructed from S1, S2, bl
and bu. Based on the relative location of the sojourn time curves, two cases can be distinguished. In case S2 < S1, as shown in
Fig. 4. Performance improvement of policy 2 over policy 1.

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 107
Fig. 4, the shaded area exists. Then policy 2 is feasible. By choosing any time bucket size in the feasible domain [bl,bu], onewill obtain a lower workload and a shorter sojourn time simultaneously. Both sojourn time and workload are improved. Incontrast, the shaded area does not exist if S2 P S1. In this case, not shown in Fig. 4, policy 2 does not produce a shorter so-journ time.
In identifying the lower bound of bucket size, a recursive relationship between tour time and bucket size is noticeable. Adecrease in tour time permits a decrease in the bucket size. In turn, a decrease in the bucket size will decrease the number ofjobs that are accumulated within each bucket. The tour time will be decreased, so is the sojourn time. Ensured by the con-cavity of the tour length functions (c1, c2 and the asymptotic slope being less than 1), this recursive relation is not divergentand is stated in the following property.
Asymptotic property 1: between sojourn time and tour time.
The asymptotic ratio of sojourn time over tour time is 1 for policy 1 and 1 + p for policy 2 at the lower bound bi.
Derivation:
The asymptotic ratio between sojourn time and tour time is constant and is derived as follows. The tour length and tourtime corresponding to the minimal bucket size are indicated by an underscore.
L1=v ¼ a1kc1 bc1
1 r=v ¼ a1kc1 ða1k
c1 r=vÞc1=ð1�c1Þr=v ¼ ða1kc1 r=vÞ1=ð1�c1Þ
T1 ¼ ða1kc1 r=vÞ1=ð1�c1Þ
T1=ðL1=vÞ ¼ ða1kc1 r=vÞ1=ð1�c1Þ=ða1k
c1 r=vÞ1=ð1�c1Þ ¼ 1
Similarly, for policy 2, the ratio is 1 + p.L2=v ¼ a2kc2 bc2
2 r=v ¼ a2kc2 ða2k
c2 r=vÞc2=ð1�c2Þr=v ¼ ða2kc2 r=vÞ1=ð1�c2Þ
T2 ¼ ð1þ pÞða2kc2 r=vÞ1=ð1�c2Þ
T2=ðL2=vÞ ¼ ð1þ pÞða2kc2 r=vÞ1=ð1�c2Þ=ða2k
c2 r=vÞ1=ð1�c2Þ ¼ 1þ p
This property validates two characteristics of Fig. 4. The intersection of the sojourn time curve and the workload curve isat point W1. The sojourn time S2 is larger than bl for policy 2 and the gap is proportional to p. For the shaded area to exist, thetransshipment probability must be smaller than a certain value. Three results can be drawn from Proposition 2 and the aboveasymptotic property.
Results:
(1) Policy 2 is better than policy 1 when the arrival rate is greater than a threshold. This result can also be explained withthe curvature of the tour length functions in Fig. 2. The gap between fWT and fSR increases with the job quantity. It ismore economical to make use of fSR when job quantity is large. In contrast, if the job quantity is small, it is efficient foreach courier to service all deliveries without transshipment.
(2) As the quantity of CR jobs increases, the job density for excursion trips under policy 1 will increase. Policy 1 will regainthe economies of scale. For policy 2 to excel, the CR job fraction should be less than a certain threshold.
(3) Policy 2 has an advantage if the territory is large. This can be inferred from v/r term of Proposition 2. A large value of rwill lower the threshold.
4.2. Robustness analysis for synchronized multiple couriers
In the previous subsection, the performance model is based on tour time and workload. The main parameters of the mod-el include the arrival rate k, CR job fraction p and territory size r/v. In addition, the tour length functions are dependent on theprobability p. The robustness of policy 2 can be evaluated by examining how the satisfaction of the condition of Proposition 2is affected by variation in these parameters. The territory size should be considered fixed in an application. The arrival ratemight vary over time. The fraction p describes the flow of jobs between locations. In the hospital case, the probability israther stable. Therefore, the arrival rate is the key factor that affects robustness. As the condition of Proposition 2 is ex-pressed as a threshold on the arrival rate, the robustness is explicitly manifested.
The probability p, however, has an effect that has not been addressed so far. When there is more than one courier, jobtransshipment among couriers needs to be synchronized at the end of a time period. The commencement of the next servicetour is constrained by the return time of the last courier to come back to the depot. Index the couriers by a subscript k,k = 1, . . .,n. For each policy, the time bucket size b must be greater than or equal to the maximum of {Lk/v, k = 1, . . .,n}. Innon-parametric statistics, the kth order statistic of a statistic sample is equal to its kth smallest value. Therefore, the nth or-der statistic is used in performance analysis.

108 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
From Order Statistics, if X1,X2, . . .,Xn are i.i.d. random variables with probability distribution f(x), the density function forthe nth order statistics, X(n), is (Ghahramani, 2005):
fXðnÞ ðxÞ ¼ nf ðxÞ½FðxÞ�n�1
Note that in this subsection f stands for the density function, not the tour length function. The following results of OrderStatistics are useful in our analysis of the minimal time bucket:
(1) The expected value of the nth order statistic X(n) is greater than or equal to the expected value E[X]. If n = 1, the equal-ity holds.
(2) If Xi is a normal random variable with density function N(l,r), the expected value of the kth order statistic can beexpressed as (Lloyd, 1952):
E½XðkÞ� ¼ lþ r � E½XsðkÞ� k ¼ 1; . . . ; n ð11Þ
where Xsk is the kth order statistics for standard normal distribution. The value of E½Xs
ðnÞ� has been calculated by David (1981)for some value of n, e.g.,
E½Xsð2Þ� ¼ p�0:5 ¼ :5642; E½Xs
ð3Þ� ¼ 1:5p�0:5 ¼ :8463; and E½Xsð5Þ� ¼ 1:1630:
Consider that there are n couriers. Compared with the case of individual couriers, the time bucket must be increased by anamount equal to rE½Xs
ðnÞ�; from Eq. (11). The sojourn time will also be commeasurably affected.Let X be the tour length. The difference between the longest tour (of n couriers) and the average tour length is:
DLi ¼ ri � E½XsðnÞ�; i ¼ 1;2:
The time bucket must be increased accordingly by DLi. From Asymptotic property 1, the changes in sojourn times T1 and T2
(as a function of DLi) are:
DT1 ¼ r1E½XsðnÞ�=v
DT2 ¼ ð1þ pÞr2E½XsðnÞ�=v
For policy 2 to maintain its superior mean-value performance, it is necessary that
T2 þ DT2 6 T1 þ DT1 ð12Þ
By policy 2, the variation in return time to the depot has an effect on setting the bucket size. The CR job fraction p is iden-tified as the key factor as is shown in the following proposition.
Proposition 3 (synchronization of multiple couriers). Suppose that proposition 2 is satisfied. The advantage of policy 2 overpolicy 1 will not be jeopardized when there are multiple couriers if p 6 ðr1=r2Þ � 1, where r1 and r2 are the standarddeviations of the tour length for policies 1 and 2, respectively.
Proof. Since T2 6 T1, a sufficient condition for Eq. (12) is DT2 6 DT1. Thus,
ð1þ pÞr2 6 r1: ð13Þ
If the transshipment fraction p is smaller than r1/r2 � 1, the superiority of policy 2 is not jeopardized by the need to syn-chronize multiple couriers. h
The condition of Eq. (13) is a sufficient condition as the original difference between T2 and T1 is not included. If the con-dition is not satisfied, the effect of multiple couriers should be calculated by using Eq. (12).
4.3. Sorting time analysis
Sorting time should be added to the tour time. Although policy 2 will use a smaller time bucket, in this analysis of sortingtime we will assume the same quantity of P&D jobs, q, in a time bucket for both policies for clarity of presentation. The keyfactor that affects sorting time is the number of destination departments. A destination is called a pigeon hole in sorting timeanalysis. A courier will work with fewer pigeon holes under policy 2 than policy 1. In this section, it will be shown that policy2 will incur less sorting time, which should be added to the tour time or cycle time in determining the time bucket size.
4.3.1. Policy 1Couriers leave the depot empty-handed and return to the depot empty-handed. Sorting time is required on the tour. The
destination departments for each courier include all departments. In a tour, a courier will pick up q/n jobs. Thus, there are q/ninsertion operations into m pigeon holes. The resultant sorting time should be added to the tour time.

Table 1Sorting work analysis.
Location of sorting No. of insertions No. of pigeon holes
Policy 1 On the tour q/n m
Policy 2 At the depot qp/n (n � 1)m/nOn the tour q/n–qp/n m/n
Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 109
4.3.2. Policy 2The sorting time to be added to the routing time contains two parts: at the depot and on the tour. Each courier will receive
qp/n transshipped jobs from n � 1 other couriers at the depot. Assume that it is the duty of a courier to place the jobs thathe/she brings back into the pigeon holes of other couriers. Each courier’s duty region contains m/n pigeon holes. Thus, thenumber of pigeon holes that a courier work with is (n � 1)m/n.
A courier will pick up q/n jobs on the tour. Among them, qp/n are cross-region jobs which need not be inserted into thedelivery list during the tour. Thus, the total number of insertions is q/n–qp/n. Since the clinical departments are dividedamong the couriers, the number of pigeon holes is m/n.
The required sorting work is summarized in Table 1. Both polices have the same total number of insertion operations. Thenumber of pigeon holes is the deciding factor on sorting time. It can be seen that policy 2 will require less sorting time. Thisbenefit can be attributed to dividing the whole territory to multiple duty regions such that the pigeon holes are less for eachcourier.
5. Application to courier services in a large hospital
In this section, a case study of the courier services in a large hospital is presented. Data of patient visits to two clinicaldepartments within a single day is collected over 6 months. The first department is considered as the pickup location andthe second department is the destination location. The percentages of the origin–destination transportations are listed inTable A.2 of the Appendix. There are 24 clinical departments in total and they are clustered into three duty regions (A, B,and C) for the purpose of courier services. The distance matrix of the 24 departments is shown in Table A.3 of the Appendix.The job arrival rate is 0.7167 requests per minute to the depot. The fraction of cross-region jobs is approximately p = 0.75.
The applicability of policy 2 is evaluated in two phases. In the first phase, the formulas of Section 4 are applied. By inter-polation on the tour length functions for p = 0.5 and 1.0, it is estimated that a1 = 4.3660 and c1 = 0.5072. The territory sizeparameter r/v of one duty region is estimated to be 5.0 min. The threshold ~k is calculated to be 0.0056. However, these cal-culations are based on mean-value analysis. But, it can be seen from Table A.2 that the service requests are not uniformlydistributed in the hospital case. Nevertheless, the hospital does have 3 clusters of service locations, each assigned to a cou-rier. Since the arrival rate is far greater than the threshold ~k, policy 2 is deemed promising. A second phase of evaluation iscalled for. In this phase, simulation is used in policy evaluation by using field data of Tables A.2 and A.3. The simulation com-pliments the analytical results of Section 4.
In each simulation, a job set is generated by Monte Carlo simulation. To compare the performance of the two policies, t-tests will be used. A total of 30 data sets of P&D jobs are generated, one for each simulation replication. Other experimentalsettings are:
� The number of couriers n = 3.� Job arrival is Poisson with rate k = 0.7167 requests/minute.
The Nearest Neighborhood method is used to generate service tours for both policies. Although the method does not guar-antee optimal routings, it does not have a bias toward either policy. Detailed statistics of the simulation output are listed inTable A.4 in the Appendix. The performance data of the output is concisely summarized in Table 2. Analysis of the perfor-mance data shows the following results:
(1) For the same bucket size, policy 2 brings about a lower workload and a higher sojourn time than policy 1. Therefore,the lower limit on bucket size for policy 2 will always be lower than that for policy 1. This result is consistent withstochastic analysis in Section 4.
(2) Many small bucket sizes are infeasible for policy 1. This occurs when workload is greater than the bucket size. Infea-sible bucket sizes are indicated by shaded cells of the table. The only feasible bucket size for policy 1 is 45 min. Theaverage workload is 42.4 min and the average sojourn time is 39.8 min.
(3) The smallest feasible bucket size for policy 2 is 20 min. The average workload is 18.8 min and the average sojourn timeis 32.8 min. Compared with the performance of policy 1, workload is reduced by 55.66% and sojourn time is reducedby 17.59%. Statistical tests yield t-values of 15.07 and 9.73, respectively (using data in Table A.4). Statistically speaking,policy 2 is better than policy 1.
(4) Applying policy 2 with a bucket size of 25 min results in a Pareto improvement over policy 1. Workload is reduced by53.3% but the reduction in sojourn time is not significant.

Table 2Simulation output of the performance data.
Bucket size POLICY 1 POLICY 2
Average workload Average sojourn Average workload Average sojourn
45 42.4 39.8 23.4 66.140 42.0 35.9 22.0 59.435 40.4 32.9 21.7 53.030 38.5 29.5 20.9 46.425 35.8 25.3 19.8 39.620 33.6 21.5 18.8 32.815 29.4 17.0 17.5 25.710 24.1 11.5 14.9 17.6
unit: [min].
110 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
These results show that the dual objectives of reducing both workload and sojourn time could be achieved with policy 2.Also, the improvement of policy 2 over policy 1 is very significant.
6. Discussion and conclusions
In general routing problems, tradeoffs between conflicting objectives are fundamental. It is common in the literature toemploy additive utility functions or goal programming. In this paper, the approach of designing operational policy is taken. Asalient policy (policy 2) based on hub transshipment across flexible time periods is proposed. The advantage of the policy isanalyzed by using stochastic routing analysis and mathematical derivation. In the case study of hospital courier services,numerical calculation demonstrates that policy 2 is superior to the current policy (policy 1).
Theoretical contributions of this paper have two parts:
(1) The square root law of tour length is further verified. Based on the result of this study and the literature, the lawappears to be general in a variety of problem settings, territory configurations and (optimal and heuristic) routingalgorithms. In the literature, the formula is derived for circular and rectangular territories for general routing problembut no significance was assigned to it. In this study, a more general 3-circle cluster configuration is studied and theproblem setting is P&D routing with cross-region routing. The result provides supporting evidences to the robustnessof the law. More importantly, consistent recurrence of the formula warrants a theorization. The formula could becalled the square root law or formula of route length. The theorization will facilitate future research work on stochas-tic routing and policy design. (To use the formula, coefficients remain to be calibrated in different applications.)
(2) This paper shows that hub transshipment across flexible time buckets is powerful when the service territory is largeand the arrival rate and cross-region fraction meet certain thresholds. The insights constitute refinements of the gen-eral knowledge on routing efficiency and can be summarized as follows. First, the size of territory is known to be det-rimental to the efficiency of courier services. By restricting each courier to work in a dedicated region and by clusteringjobs across periods, policy 2 systematizes a form of economies of scale that has not been analyzed in the past. Second,it is known that high demand is a favorable condition for efficient routing (e.g., Cortés et al., 2010). But long sojourntime tends to accompany high demand. Through clever workload aggregation and, thus, reduced time bucket, policy 2leads to a reduction in both courier workload and sojourn time concurrently. Thirdly, insights are generated for a new,practical cluster configuration of P&D service requests. Policy 2 is applicable when the CR job fraction is less than athreshold. If, however, the fraction is higher than the threshold, excursion trips under policy 1 would not incur exces-sive tour time (per job) since policy 1 would regain economies of scale with increasing CR jobs.
On methodological contribution, this paper develops a method for systematizing a new form of economies of scale forP&D services and for concurrently improving the dual objectives of courier workload and customer waiting time. Policy 2is a method for Pareto improvement on both patient waiting time and courier utilization. It might also reduce the idle timeof doctors. The method is more general than other methods that optimize on one performance measure under the constraintof another performance measure.
In addressing P&D service problems, one should distinguish between policy design and dynamic operation control. Policydesign is usually concerned with long-term average performance; deviations from the mean value can be left to be copedwith by dynamic control or other reactive measures in actual operation. We will explain the difference between policy eval-uation and dynamic control with some examples. Under policy 2, a courier will deliver two types of jobs: CR and SR jobs. Inthe simulation design of Section 5, transshipped jobs and other jobs are mixed together as a set of jobs for a courier to exe-cute. However, in actual operation many ideas of fine-tuning can be applied. For example, the CR jobs could be delivered first,ahead of other pickup and delivery jobs. This rule will be more acceptable to the management as those jobs have been in thesystem for quite a while. Also, transshipping all CR jobs might not be the best rule. If the delivery location of a CR job is justacross the boundary of its pickup region and the courier happens to be on a short tour, it might be better for the courier to

Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 111
cross the regional boundary and complete the delivery. Dynamic control addresses a short-term or real time problem. Thejob set is known and routing and transshipment decisions can be made more adaptive to the specifics of the job set. How-ever, it is generally intractable to include such detailed dynamic control rules in analytical evaluation of policy design.
Dynamic control will further enhance the performance of policy 2. It is a problem of algorithm development and it is dif-ferent in nature from policy evaluation. Many creative ideas can be incorporated in dynamic control. This is a direction forfuture research work.
Acknowledgement
This study is partially supported by funding from the National Science Council of Taiwan under Grant 99-2221-E-002-153-MY3.
Appendix A. Case study data and simulation output
The simulation output is summarized in the following table. The data in the ‘‘busiest’’ row refers to the longest routeamong the three couriers in each simulation experiment. The busiest route is first identified in each experiment and then
Table A.1Resultant data of normality tests.
Kolmogorov–Smirnovb Shapiro–Wilk
Statistic df Sig. Statistic df Sig.
q = 3 L1 .085 30 .200a .984 30 .925L2 .065 30 .200a .990 30 .993
q = 4 L1 .081 30 .200a .994 30 1.000L2 .103 30 .200a .977 30 .732
q = 5 L1 .115 30 .200a .979 30 .801L2 .112 30 .200a .981 30 .840
q = 6 L1 .066 30 .200a .986 30 .946L2 .072 30 .200a .990 30 .993
a This is a lower bound of the true significance.b Lilliefors significance correction.
Table A.2From–to percentages of courier service requests.
From To
Al A2 A3 A4 A5 B6 B7 B8 B9 BIO All A12 A13 A14 A15 B16 B17 B18 B19 C20 C21 C22 C23 C24
Al 9.06 – 0.31 – 0.72 0.03 0.87 1.28 – – 0.31 0.03 0.31 – 0.56 0.28 0.06 0.78 0.31 1.49 0.75 1.12 0.96 –A2 – – – – – – – 0.06 – – – – – – – – – – – – 0.03 – –A3 0.12 – – – – – – 0.03 – – – – 0.03 – – – – 0.03 0.06 – – – – –A4 – – – 0.03 – – – – – – 0.03 – 0.03 – – – – – – – – – –A5 0.50 – – – 0.53 – 0.19 0.31 – – – 0.09 0.22 0.03 0.09 – – 0.16 0.03 0.16 0.12 0.06 0.22 –B6 – – – 0.03 – – – – – – – – – – – – – – – 0.03 – – –B7 0.44 – 0.03 – 0.22 – 0.90 0.12 – 0.03 0.03 0.31 0.09 0.37 0.22 0.03 – 0.09 0.22 0.09 0.19 0.19 0.12 –B8 1.21 – – – 0.47 – 0.44 1.37 – – 0.12 0.12 0.25 – 0.62 0.09 0.03 0.22 0.37 0.44 0.16 0.12 0.31 0.03B9 – – – – – – – – 0.03 – – – – – – – – – – – – – – –BIO 0.16 – – – – – – – – 0.53 0.03 – – – – – – – – – 0.03 0.03 – 0.03All 0.59 – – – 0.12 – 0.03 0.22 – – 1.09 0.06 0.16 0.03 0.62 0.16 – – 0.06 0.16 0.40 0.12 0.03 –A12 0.06 – – – 0.12 – 0.06 0.37 – – 0.09 14.60 0.03 0.03 0.06 – 0.06 – 0.03 0.47 0.25 0.09 0.03 –A13 0.34 – – – 0.06 – – 0.19 – – 0.03 0.06 0.03 – 0.06 0.03 – 0.09 0.09 0.09 0.12 0.06 0.09 –A14 – – – – 0.03 – 0.78 0.03 – – – – – – – – – – – 0.09 0.03 – 0.03 –A15 0.87 – 0.03 – 0.50 – 0.12 0.75 – 0.03 0.31 – 0.06 – 8.28 0.06 – 0.06 0.16 0.16 3.70 0.34 0.28 –B16 0.22 – – – 0.03 – 0.03 0.12 – – – 0.06 – – – 0.37 – 0.03 0.22 0.03 0.12 0.03 0.06 –B17 0.28 – – – 0.09 – – 0.03 – – – 0.03 0.03 0.03 0.03 0.06 – 0.03 0.03 – – – 0.03 –B18 0.75 – – – 0.28 – 0.12 0.25 – – 0.06 – 0.25 – 0.06 0.06 – 0.12 0.16 0.34 0.19 0.22 0.09 –B19 0.47 – 0.28 – 0.16 – 0.28 0.28 – – 0.22 0.12 0.22 – 0.06 0.06 – 0.16 3.02 0.44 0.40 0.19 0.28 –C20 1.18 – – – 0.25 – 0.12 0.34 – – 0.25 0.50 0.12 0.03 0.12 0.06 – 0.34 0.09 0.59 0.31 0.37 0.22 –C21 0.53 – – – 0.09 – 0.06 0.22 – – 0.40 0.06 0.03 3.02 0.03 – 0.22 0.06 0.37 0.34 0.06 0.12 –C22 0.50 – – – 0.25 – 0.31 0.16 – – 0.12 0.06 – – 0.09 0.19 – 0.16 0.31 0.40 0.22 0.44 0.09 –C23 0.68 0.03 0.03 – 0.19 – 0.12 0.19 – – 0.03 0.03 0.06 – 0.16 0.06 – 0.12 0.31 0.16 0.22 0.06 0.31 –C24 – – – – – – – – – – – – 0.03 – – – – 0.03 – – – – – –

Table A.3Distance (travel time) matrix between departments.
A B A B C
H 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 240 1 2 3 2 3 8 7 6 8 7 5 1 4 3 4 4 5 6 5 6 6 5 7 2 H
0 1 2 3 2 9 8 7 9 8 6 2 5 4 5 5 6 7 6 7 7 6 8 3 1 A0 1 2 3 8 7 6 8 7 7 3 6 5 6 6 7 8 7 8 8 7 9 4 2
0 1 4 7 6 5 7 6 6 4 5 4 5 5 6 7 8 9 9 8 10 5 30 5 6 5 4 6 5 5 3 4 3 4 4 5 6 7 8 8 7 9 4 4
0 11 10 9 11 10 10 8 9 8 9 9 10 11 12 9 9 8 10 5 5
0 1 2 3 4 11 9 10 9 10 6 6 5 4 14 14 13 I5 10 6 B0 1 2 3 10 8 9 8 9 5 5 4 3 13 13 12 14 9 7
0 1 2 9 7 8 7 8 4 4 3 2 12 12 11 13 8 80 1 7 6 6 5 6 3 4 5 4 14 14 13 I5 10 9
0 6 5 5 4 5 2 3 4 3 13 13 12 14 9 10
0 5 1 2 3 2 1 2 3 11 11 10 12 7 11 A0 4 5 4 3 4 5 6 7 7 6 8 3 12
0 1 2 3 3 4 5 10 10 9 11 6 130 1 3 4 5 6 9 9 8 10 5 14
0 4 5 6 7 10 10 9 11 6 I5
0 1 2 3 10 10 9 11 6 16 B0 1 2 11 11 10 12 7 17
0 1 12 12 11 13 8 180 11 11 10 12 7 19
0 2 3 5 4 20
0 2 4 4 21 C0 2 3 22
0 5 230 24
Table A.4Statistics of the simulation output.
Bucket size Courier Workload Sojourn time
Average Std. dev. Average Std. dev.
POLICY 145 A 41.2 9.97 43.1 39.8 4.88
B 28.1 5.63 36.6C 30.2 7.71 39.9Busiest 42.4 8.70
40 A 39.9 10.88 39.9 35.9 5.17B 25.9 6.43 33.0C 29.6 7.75 34.8Busiest 42.0 8.81
35 A 38.0 10.88 36.5 32.9 5.03B 25.4 6.84 30.2C 28.9 7.57 32.0Busiest 40.4 9.12
30 A 36.1 10.87 33.1 29.5 5.13B 24.2 6.92 27.1C 26.9 8.71 28.4Busiest 38.5 8.86
25 A 31.4 13.18 28.2 25.3 5.90B 21.9 9.15 23.4C 23.6 10.80 24.3Busiest 35.8 8.46
20 A 26.5 14.34 23.3 21.5 6.16B 20.6 9.84 20.3C 21.8 11.93 20.9Busiest 33.6 7.61
15 A 21.7 12.88 18.4 17.0 6.18B 18.2 10.25 16.6C 17.1 13.64 16.0Busiest 29.4 8.02
112 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114

Table A.4 (continued)
Bucket size Courier Workload Sojourn time
Average Std. dev. Average Std. dev.
10 A 13.4 12.62 11.7 11.5 6.01B 12.8 11.33 11.4C 13.1 12.48 11.5Busiest 24.1 7.67
POLICY 245 A 22.5 4.80 67.5 66.1 1.98
B 17.0 0.96 64.8C 19.4 2.93 66.0Busiest 23.4 3.78
40 A 20.9 3.95 60.4 59.4 1.67B 16.7 1.41 58.4C 18.9 2.83 59.4Busiest 22.0 2.65
35 A 20.2 4.03 53.9 53.0 1.64B 16.6 1.27 52.1C 18.8 2.86 53.2Busiest 21.7 2.92
30 A 18.8 3.99 46.9 46.4 1.64B 16.0 1.47 45.5C 18.4 3.22 46.7Busiest 20.9 2.32
25 A 16.9 4.63 39.7 39.6 1.76B 15.9 1.67 39.2C 17.3 3.57 39.9Busiest 19.8 2.47
20 A 15.1 4.97 32.6 32.8 1.91B 15.4 2.01 32.7C 16.4 3.87 33.2Busiest 18.8 2.69
15 A 12.9 5.21 25.2 25.7 2.24B 15.0 2.17 26.2C 14.0 5.26 25.7Busiest 17.5 3.15
10 A 8.7 6.05 16.9 17.6 3.05B 11.3 5.96 18.2C 10.5 6.20 17.8Busiest 14.9 2.20
Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114 113
the average and standard deviation are calculated over all replications. The average and standard deviation of sojourn timeare calculated from all routes. Bold-faced numbers are summarized in Table 1 in the main text.
References
Angelelli, E., Bianchessi, N., Mansini, R., Speranza, M.G., 2009. Short term strategies for a dynamic multi-period vehicle routing problem. TransportationResearch Part C: Emerging Technologies 17 (2), 106–119.
Athanasopoulos, T., Minis, I., 2011. Multi-period routing in hybrid courier operations. In: Minis, I., Zeimpekis, V., Dounias, G., Ampazis, N. (Eds.), SupplyChain Optimization, Design, and Management: Advances and Intelligent Methods. ICI Global, New York, pp. 232–251.
Berbeglia, G., Cordeau, J.-F., Gribkovskaia, I., Laporte, G., 2007. Static pickup and delivery problems: a classification scheme and survey. Top 15, 1–31.Berbeglia, G., Cordeau, J.-F., Laporte, G., 2010. Dynamic pickup and delivery problems. European Journal of Operational Research 202, 8–15.Bertsimas, D., Van Ryzin, G., 1991. A stochastic and dynamic vehicle routing problem in the Euclidean plane. Operations Research 39, 601–615.Cayirli, T., Veral, E., 2003. Outpatient scheduling in health care: a review of literature. Production and Operations Management 12 (4), 519–549.Cordeau, J.-F., Laporte, G., Ropke, S., 2008. Recent models and algorithms for one-to-one pickup and delivery problems. In: Golden, B.L., Raghavan, S., Wasil,
E.A. (Eds.), The Vehicle Routing Problem: Latest Advances and New Challenges, vol. 43. Kluwer, Boston, pp. 327–357.Cortés, C.E., Matamala, M., Contardo, C., 2010. The pickup and delivery problem with transfers: formulation and a branch-and-cut solution method.
European Journal of Operational Research 200 (3), 711–724.Cruijssen, F., Cools, M., Dullaert, W., 2007. Horizontal cooperation in logistics: opportunities and impediments. Transportation Research Part E: Logistics and
Transportation Review 43 (2), 129–142.Daganzo, C.F., 1984. The length of tours in zones of different shapes. Transportation Research Part B: Methodological 18 (2), 135–145.David, H.A., 1981. Order Statistics, second ed. John Wiley & Son, New York.Gent, I.P., Walsh, T., 1996. The TSP phase transition. Artificial Intelligent 88, 105–109.Ghahramani, S., 2005. Fundamentals of Probability with Stochastic Processes, third ed. Pearson-Prentice Hall, New Jersey.Gupta, D., Denton, B., 2008. Appointment scheduling in health care: challenges and opportunities. IIE Transactions 40, 800–819.

114 Y.-C. Chou et al. / Transportation Research Part E 61 (2014) 98–114
Haughton, M.A., 2008. The contribution of advanced package arrival information to efficient ground deliveries by international couriers. TransportationResearch Part E: Logistics and Transportation Review 44 (1), 66–83.
Larsen, A., Madsen, O., Solomon, M., 2002. Partially dynamic vehicle routing-models and algorithms. The Journal of the Operational Research Society 53 (6),637–646.
Lin, C.K.Y., 2008. A cooperative strategy for a vehicle routing problem with pickup and delivery time windows. Computers & Industrial Engineering 55, 766–782.
Lloyd, E.H., 1952. Trust least-squares estimation of location and scale parameters using order statistics. Biometrika 39 (1/2), 88–95.Mes, M., van der Heijden, M., Schuur, P., 2010. Look-ahead strategies for dynamic pickup and delivery problems. OR Spectrum 32, 395–421.Mitrovic-Minic, S., Laporte, G., 2004. Waiting strategies for the dynamic pickup and delivery problem with time windows. Transportation Research Part B:
Methodological 38, 635–655.Mitrovic-Minic, S., Laporte, G., 2006. The pickup and delivery problem with time windows and transshipment. INFOR Information Systems and Operational
Research 44 (3), 217–227.Nakao, Y., Nagamochi, H., 2008. Worst case analysis for pickup and delivery problems with transfer. IEICE Transactions on Fundamentals of Electronics,
Communications and Computer Sciences E91-A (9), 2328–2334.Parragh, S.N., Doerner, K.F., Hartl, R.F., 2008. A survey on pickup and delivery problems Part II: transportation between pickup and delivery locations. Journal
für Betriebswirtschaft 58, 81–117.Pureza, V., Laporte, G., 2008. Waiting and buffering strategies for the dynamic pickup and delivery problem with time windows. INFOR Information Systems
and Operational Research 46 (3), 165–175.Robbins, H., 1948. The asymptotic distribution of the sum of a random number of random variables. Bulletin of the American Mathematical Society 54 (12),
1151–1161.Sáez, D., Núñez, A., Muñoz-Carpintero, D., 2009. Hybrid adaptive predictive control for a dynamic pickup and delivery problem. Transportation Science 43
(1), 27–42.Swihart, M.R., Papastavrou, J.D., 1999. A stochastic and dynamic model for the single-vehicle pick-up and delivery problem. European Journal of Operational
Research 114, 447–464.Wen, M., Cordeau, J.-F., Laporte, G., Larsen, J., 2010. The dynamic multi-period vehicle routing problem. Computers & Operations Research 37, 1615–1623.