
PERANCANGAN GAIT ROBOT DENGAN EKSPANSI LINIER …thesis.binus.ac.id/Doc/RingkasanInd/2011-2-00111-SK...
21
PERANCANGAN GAIT ROBOT DENGAN EKSPANSI LINIER UNTUK ROBOT ULAR DENGAN SENDI 3 DERAJAT KEBEBASAN Daniel, Mohammad Iman Alamsyah, Erwin, Sofyan Jurusan Sistem Komputer,Fakultas Ilmu Komputer, Universitas Bina Nusantara Jln. K.H. Syahdan No.9, Kemanggisan, Palmerah, Jakarta Barat 11480 [email protected] ABSTRACT We made this gait design or movement type of a serpentine robot with 3-DOF joint using linear expansion mechanism. The purpose of this research is to be the foundation for further researches and to find the most effective gait to be used in helping the rescuer to do their job in explorating disaster area and saving the victims. The methods we used are literature studying and simulating using MATLAB. The results is a gait both in moving forward and doing manuvers.The conclusion is, when this design is finished, the serpentine robot will produce a gait both in moving forward and doing manuvers and it can be improved by modelling its dynamics and design until we get the physical shape. Keywords: serpentine robot, gait, linear expansion, inverse kinematics. ABSTRAK Penulis membuat perancangan gait atau model gerakan dari robot ular dengan sendi 3-DOF dengan mekanisme pergerakan ekspansi linear. Tujuan Penelitian adalah sebagai fondasi untuk penelitian selanjutnya dan mendapatkan gait yang efektif yang kelak akan digunakan untuk membantu tim penyelamat dalam menjalankan tugasnya mengeksplorasi area bencana dan menyelamatkan korban. Metode Penelitian menggunakan studi paper dan simulasi menggunakan MATLAB. Hasil Penelitian adalah berupa gait robot dalam bergerak maju dan melakukan manuver. Simpulannya setelah perancangan selesai, robot ular yang disimulasikan menghasilkan gait dalam bergerak maju dan melakukan manuver dan dapat dikembangkan dengan memodelkan dinamika dan perancangan hingga menghasilkan bentuk fisik. Kata kunci : robot serpentine, gait, linear expansion, inverse kinematik.
Transcript of PERANCANGAN GAIT ROBOT DENGAN EKSPANSI LINIER …thesis.binus.ac.id/Doc/RingkasanInd/2011-2-00111-SK...

PERANCANGAN GAIT ROBOT DENGAN EKSPANSI
LINIER UNTUK ROBOT ULAR DENGAN SENDI 3
DERAJAT KEBEBASAN
Daniel, Mohammad Iman Alamsyah, Erwin, Sofyan
Jurusan Sistem Komputer,Fakultas Ilmu Komputer, Universitas Bina Nusantara
Jln. K.H. Syahdan No.9, Kemanggisan, Palmerah, Jakarta Barat 11480 [email protected]
ABSTRACT
We made this gait design or movement type of a serpentine robot with 3-DOF joint using linear
expansion mechanism. The purpose of this research is to be the foundation for further researches and to find the most effective gait to be used in helping the rescuer to do their job in explorating disaster area and saving the victims. The methods we used are literature studying and simulating using MATLAB. The results is a gait both in moving forward and doing manuvers.The conclusion is, when this design is finished, the serpentine robot will produce a gait both in moving forward and doing manuvers and it can be improved by modelling its dynamics and design until we get the physical shape.
Keywords: serpentine robot, gait, linear expansion, inverse kinematics.
ABSTRAK
Penulis membuat perancangan gait atau model gerakan dari robot ular dengan sendi 3-DOF
dengan mekanisme pergerakan ekspansi linear. Tujuan Penelitian adalah sebagai fondasi untuk penelitian selanjutnya dan mendapatkan gait yang efektif yang kelak akan digunakan untuk membantu tim penyelamat dalam menjalankan tugasnya mengeksplorasi area bencana dan menyelamatkan korban. Metode Penelitian menggunakan studi paper dan simulasi menggunakan MATLAB. Hasil Penelitian adalah berupa gait robot dalam bergerak maju dan melakukan manuver. Simpulannya setelah perancangan selesai, robot ular yang disimulasikan menghasilkan gait dalam bergerak maju dan melakukan manuver dan dapat dikembangkan dengan memodelkan dinamika dan perancangan hingga menghasilkan bentuk fisik.
Kata kunci : robot serpentine, gait, linear expansion, inverse kinematik.

1. Pendahuluan Bencana alam seperti gempa bumi dan tanah longsor, maupun bencana akibat kecelakaan maupun kesengajaan manusia seperti kebakaran dan ledakan, seringkali mengakibatkan runtuhnya bangunan yang menimpa korban manusia. Pada bencana dengan skala yang besar umumnya sulit untuk menemukan seluruh korban dalam waktu yang cukup singkat sehingga korban masih dapat diselamatkan jiwanya. Pencarian korban umumnya dilakukan oleh sekelompok orang dalam tim search and rescue (SAR) dengan peralatan manual untuk membuka jalan bagi orang ataupun anjing terlatih khusus untuk masuk ke dalam puing-puing reruntuhan. Sebelum orang dapat memasuki reruntuhan, observasi dan tindakan untuk memperkokoh struktur reruntuhan perlu dilakukan untuk memastikan bahwa kemungkinan runtuhnya struktur lebih jauh adalah kecil. Seringkali untuk membuka jalan bagi tim penyelamat dibutuhkan alat berat untuk mengangkat puing-puing. Proses ini membutuhkan banyak orang, peralatan, dan membutuhkan waktu yang lama bila harus dilakukan pada area reruntuhan yang luas. Untuk itu akan sangat membantu apabila terdapat banyak robot yang dapat masuk ke celah-celah reruntuhan yang tidak dapat dimasuki oleh manusia dan memberikan informasi kepada manusia dalam mengambil keputusan untuk masuk ke dalam reruntuhan. Dalam skenario terburuk seperti pada reruntuhan gedung World Trade Center akibat serangan teroris pada 11 September 2001[1], celah yang terbuka ke permukaan umumnya memiliki lebar kurang dari 1 meter. Di samping itu terdapat banyak puing-puing yang tidak kokoh seperti abu atau kertas yang dapat menenggelamkan robot ke lubang yang lebih dalam. Robot berbentuk ular cocok untuk kondisi yang seperti ini karena: bentuknya yang ramping dan sederhana membuatnya dapat bergerak melalui celah yang sempit; bentuknya yang memanjang membuatnya dapat mendaki halangan yang jauh lebih tinggi dari tinggi badan robot, bahkan halangan yang vertikal ke atas; lebarnya permukaan robot yang menyentuh tanah ketika bergerak membuatnya lebih stabil dan memiliki daya dorong yang lebih baik; dan jumlah segmennya yang banyak membuat robot lebih handal menghadapi kegagalan pada salah satu atau lebih segmennya[2]. Lebih jauh lagi robot juga harus dapat bergerak di antara puing-puing yang berbentuk panjang dan tipis, sehingga robot dengan bentuk luar yang kompleks menjadi tidak menguntungkan karena dapat tersangkut pada puing[3]. Berawal dari niat untuk meningkatkan efisiensi tim SAR dalam menyelamatkan korban bencana alam, kami merancang gait robot serpentine (robot ular) yang dapat beroperasi di medan berat untuk memetakan sekaligus mencari korban yang selamat. Berdasarkan hasil studi paper dan latar belakang yang ada, maka diputuskan untuk membuat model robot berbentuk ular dengan sendi 3-DOF untuk menghadapi area bencana. Model robot ini dipilih karena dengan sendi 3-DOF dan multi-joint yang dimiliki, dapat memudahkan robot untuk melakukan gerakan dengan manuver yang diinginkan. Area bencana yang dimaksud adalah area bencana pada bidang daratan seperti gempa bumi, kebakaran, dan beberapa bencana lain yang mengharuskan robot bergerak masuk melalui jalan alternatif tanpa mengakibatkan kerusakan lebih lanjut pada area bencana. Sebagai contoh, robot harus masuk ke dalam saluran pipa yang meliuk dengan diameter yang relatif kecil dan rapat dengan ukuran robot di mana robot berkaki akan sulit untuk melalui bidang tersebut atau masuk melalui puing-puing reruntuhan. Dengan menggunakan ekspansi linear, robot tidak membutuhkan roda/tread maupun kaki sehingga seluruh badan robot dapat tertutup rapat, menghindari masuknya partikel atau bahkan air dari luar. Masuknya partikel atau bahkan air sangat mengganggu kinerja robot yang menggunakan roda/tread atau kaki[4].
2. Metode
Metodologi penelitian yang penulis gunakan secara menyeluruh adalah studi pustaka. Penulis mendapatkan beberapa paper internasional dari IEEE yang dijadikan acuan dalam proses pembuatan buku dan simulasi. Metode lainnya adalah metode praktikal menggunakan AutoCAD Inventor untuk memodelkan bentuk 3D (tiga dimensi) dari robot dan menggunakan MATLAB untuk melakukan simulasi dan analisa kinematika.

3. Rancangan Sistem
3.1. Pemodelan Robot Dengan Software Autocad Inventor
Robot ular yang kami jadikan sebagai basis perancangan gait adalah robot ular 3-DOF yang terdapat di paper [5].
Berdasarkan [5], kami merancang model 3D robot menggunakan software Autocad Inventor 2011. Perancangan model 3D hanya sebatas pemodelan kinematik robot.Model 3D kinematika robot diperlukan untuk mengekspor parameter-parameter kinematika seperti panjang linkage dan posisi joint-joint terhadap koordinat World ke SimMechanics. Pemodelan 3D yang telah dibuat kemudian diekspor ke SIMULINK (SimMechanics) menggunakan add-on SMLink.
Toolbox SimMechanics yang berjalan di platform SIMULINK dipakai untuk mensimulasikan sistem kinematik yang parameter-parameternya sudah diberikan oleh Autocad Inventor.
Gambar 3.1 Segmentnama robot beserta parameter-parameternya yang diambil dari [5]
Keterangan Gambar : • K0 : lower plate • K1 : upper plate • R : jari – jari plate • L : panjang linkage • B1 : spherical joint 1 pada folding linkage 1 • B2 : spherical joint 2 pada folding linkage 2 • B3 : spherical joint 3 pada folding linkage 3 • O0 : origin frame lower plate terhadap world • O1 : origin frame upper plate terhadap lower plate • α1 : sudut yang harus dibentuk oleh lower linkage A terhadap lower plate • α2 : sudut yang harus dibentuk oleh lower linkage B terhadap lower plate • α3 : sudut yang harus dibentuk oleh lower linkage C terhadap lower plate
Robot serpentine ini mempunyai 4 buah segmen yang masing-masing segmen dibentuk
oleh upper plate dan lower plateyang berbentuk lingkaran. Dalam sebuah segmen, diantara upper plate dan lower plate disangga oleh tiga buah folding linkage yang terpisah sebesar 120 derajat.

Gambar 3.2 Penampang Atas Segment
Folding linkage yang menghubungkan antara upper plate dan lower plate terdiri dari dua buah link, yaitu upper linkage dan lower linkage yang dihubungkan oleh sendi spherical. Untuk menghubungkan antara link dengan upper maupun lower plate, digunakan sendi revolute.
Gambar 3.3 Penampang 3-Dimensi Segment Robot
Berikut ini adalah keterangan dimensi robot
Gambar 3.4 Dimensi Robot
50mm
50mm
50mm

Dalam perancangan ini, software Autocad Inventor digunakan untuk mendesain parameter kinematik robot. Parameter seperti radius segment, panjang linkage, sudut awal yang dibentuk oleh linkage, dan posisi masing-masing komponen terhadap koordinat World kami desain di Autocad Inventor. Alur perancangan dalam Autocad Inventor adalah:
Diagram 3.1 Alur perancangan model robot
Perancangan model sistem secara lengkap tidak bisa dilakukan secara langsung tetapi harus bertahap dimulai dari menentukan komponen mana yang digunkan untuk membentuk sebuah sistem lengkap.
Pada perancangan robot kami, komponen yang membentuk sistem robot lengkap adalah:
• Segment atas dan segment bawah • Upper linkage dan lower linkage
Komponen-komponen tersebut kami desain satu-persatu didalam file yang terpisah. Tahap selanjutnya dalam perancangan model 3-Dimensi adalah menggabungkan
komponen-komponen yang telah dibuat dengan menggunakan fitur Constraint. Fitur constraint digunakan untuk membentuk joint. Joint dibentuk dengan mengaplikasikan beberapa constraint terhadap komponen. Proses penggabungan ini menghasilkan bentuk lengkap robot yang terdiri dari 4 buah segment. Setelah robot lengkap, tahap selanjutnya adalah mengekspor model robot ke SimMechanics menggunakan add-on SMLink.
3.2. Implementasi pada Autocad Inventor
Gambar 3.5 Model 3D Lower linkage
Gambar 3.6Model 3D Upper linkage
Gambar 3.7 Model Plate

Gambar 3.8Desain kinematik segment robot menggunakan Autocad Inventor berdasarkan referensi [5]
Gambar 3.9 Desain kinematik robot dengan 4 buah segment menggunakan Autocad Inventor.
3.3. SIMULINK/SimMechanics
SIMULINK adalah platform yang digunakan untuk mensimulasikan sistem dinamis, tetapi dapat juga digunakan untuk mensimulasikan sistem kinematik seperti pada penelitian kami. Terdapat banyak toolbox yang dapat digunakan untuk mensimulasikan sistem, tetapi dalam perancangan ini kami hanya menggunakan toolbox SimMechanics dan toolbox umum sebagai pendukung.
Toolbox SimMechanics berisi part-part yang digunakan untuk mensimulasikan sistem mekanik seperti Rigid Body, Joint, Machine Environment, dan lain lain.

Gambar 3.10 Potongan tampilan model forward kinematik robot hasil export dari Autocad
Inventor (Detil gambar pada lampiran 1)
Model robot terdiri dari empat buah segment yang direpresentasikan oleh block Body. Setiap block body terhubung ke tiga buah folding linkage yang masing-masing terdapat didalam block link.
Gambar 3.11 Model dari salah satu folding linkage (Link 1A)
Pada model linkage di atas, dapat dilihat secara berurutan dari sebelah kiri bahwa upper linkage terhubung dengan revolute joint yang merupakan joint penghubung upper linkage dengan upper plate. Selain itu, upper linkage terhubung dengan spherical joint yang menjadi sendi antara upper linkage dengan lower linkage. Seperti upper linkage, lower linkage juga terhubung dengan revolute joint yang menjadi penghubung linkage pada lower plate. Pada revolute joint bagian bawah, terdapat joint actuator untuk menggerakkan linkage dengan input berupa degree atau besar sudut yang harus dibentuk oleh linkage.

Gambar 3.12(a) Model demux input dari model inverse kinematik ke masing-masing linkage
Gambar 3.12(b) Model inverse kinematik beserta inputnya
B
A
B
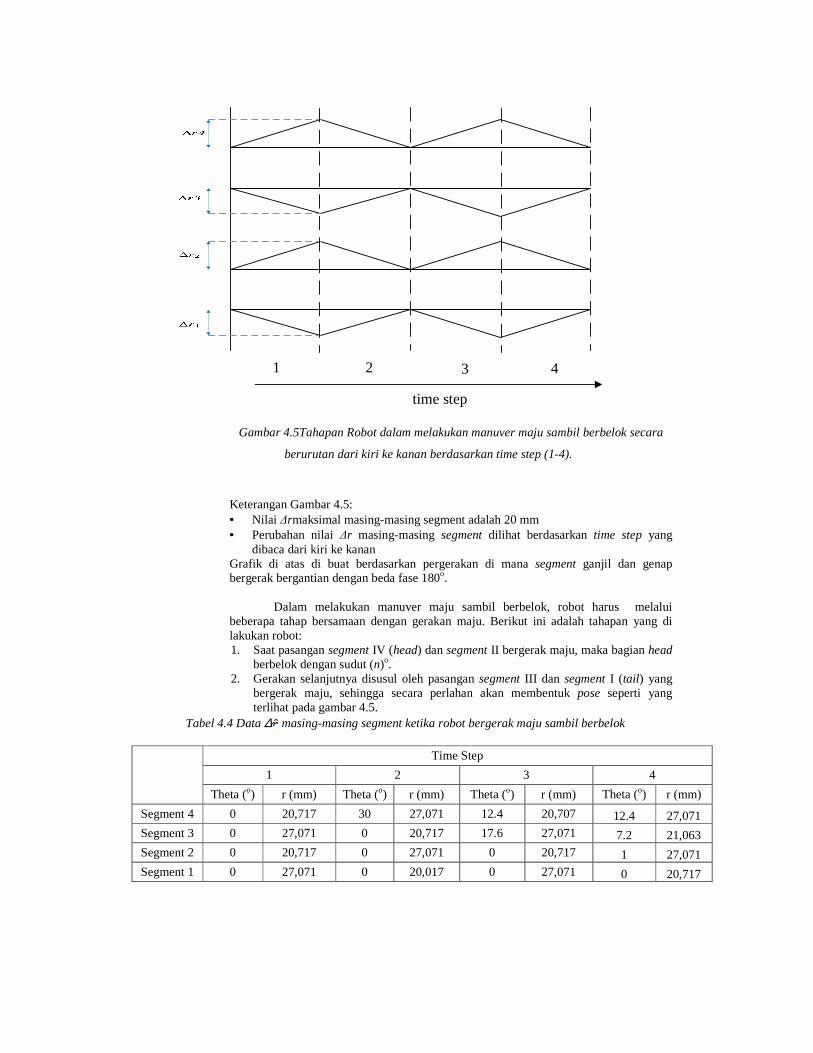
Gambar 3.12(c) Scope yang digunakan untuk membaca output inverse kinematik masing-masing
linkage
Keterangan Gambar :
• A[n]A : sudut α pada segment [n] linkage A
• A[n]B : sudut α pada segment [n] linkage B
• A[n]C : sudut α pada segment [n] linkage C
Gambar 3.13 Model Invers Kinematik (gambar selengkapnya terlampir di Lampiran)
A

Gambar di atas menunjukkan skema perumusan inverse kinematik sesuai dengan [5]. Blok diagram di atas merupakan model persamaan inverse kinematik menggunakan simulink berdasarkan persamaan di bawah ini:
Dimana qi0,qi1, dan qi2 adalah sebagai berikut,
Pada rumus diatas, s berarti sin dan c berarti cos. Gamma (γ) adalah sudut yang dibentuk antara folding linkage yang pada robot ini yang berarti 0o untuk γ1, 120o untuk γ2, dan 240o untuk γ3. αiadalah sudut yang harus dibentuk oleh lower linkage terhadap segment tempatnya menempel. Variabel θ menunjukkan besarnya sudut yang harus dibentuk antara upper plate dengan lower plate. Sedangkan variabel φ menunjukkan orientasi sumbu gerak antara upper plate dengan lower plate. Pada model kami, nilai φ selalu 0° karena simulasi pergerakan robot kami hanya di bidang planar. Variabel U,V, u, dan v adalah hasil dari perkalian elemen matriks. Untuk variabel U berasal dari perkalian antara Rdengan cos γi, sedangkan V berasal dari perkalian antara R dengan sinγi. Variabel u adalah hasil perkalian antara L dengan sin(γi+γ0) dan variabel v adalah hasil perkalian antara L dengan cos(γi+γ0). Variabel L dan R merujuk pada radius segment dan panjang linkage. Pada robot yang dirancang, nilai L dan L adalah 50mm. Variabel ωi adalah hasil perkalian antara L dengan sinαi.
Gambar 3.14 diagram Phi, Theta dan r dalam sistem koordinat spherical
(3.1)
(3.3)
(3.2)
(3.4)
(3.5)

Pada gambar 3.14, terdapat 3(tiga) buah blok Q yang masing-masing berisi subsystem yang menggambarkan pengaruh gerakan salah satu linkage terhadap posisi dan orientasi dari linkage lainnya. Detil isi blok q1, q2 dan q3 terdapat di Lampiran.
Ruang Lingkup
Ruang lingkup kami dalam pengembangan Serpentine Robot ini adalah hanya melakukan desain dan analisa kinematik&pose estimation dari robot serpentine segi tiga menggunakan simulasi komputer.
4. Penelitian dan Evaluasi
4.1. Evaluasi Inverse Kinematik Internal Segment
Hasil simulasi yang didapat adalah berupa sudut–sudut α yang di bentuk oleh masing–
masing folding linkage untuk mencapai pose yang diinginkan.
Gambar 4.1Contoh Hasil Output berupa pose robot dan sudut–sudut α pada setiap linkage
Inverse kinematik digunakan didalam sistem agar dapat menggerakkan
masing-masing segment dapat memenuhi dua variabel input (θ untuk sudut antara upper plate
dengan lower plate, dan untuk jarak antara upper plate dengan lower plate)

Tabel 4.1 Sudut Alpha masing-masing linkage segment sesuai dengan Theta
Grafik 4.1 Plot Pergerakan sudut Alpha masing-masing linkage segmen 1 terhadap Theta
Theta (derajat)
α1A(derajat) α 1B(derajat) α 1C(derajat) Hasil
Simulasi Perhitungan
Manual Hasil
Simulasi Perhitungan
Manual Hasil
Simulasi Perhitungan
Manual -10 35.34 35.29 21.3 21.13 21.3 21.13 -8 33.39 33.17 21.78 21.75 21.78 21.75 -6 31.28 31.25 22.29 22.19 22.29 22.19 -4 29.01 28,97 22.86 22.73 22.86 22.73 -2 26.6 26.31 23.46 23.29 23.46 23.29 0 24.11 24.07 24.11 24.03 24.11 24.03 2 21.58 21.22 24.79 24.68 24.79 24.68 4 19.09 19.07 25.52 25.47 25.52 25.47 6 16.74 16.56 26.27 26.16 26.27 26.16 8 14.63 14.33 27.06 27.01 27.06 27.01 10 12.85 12.57 27.88 27.68 27.88 27.68

4.2. Evaluasi Forward Kinematik untuk Pose Robot
Gambar 4.2Model forward kinematik
• Xt = (r1 sin θ1) + (r2 sin (θ1 + θ2)) + (r3 sin (θ1 + θ2 +θ3)) +
(r4 sin (θ1 +θ2 + θ3 + θ4))
• Yt = (r1 cos θ1) + (r2 cos (θ1 + θ2)) + (r3 cos (θ1 + θ2 +θ3)) +
(r4 cos (θ1 +θ2 + θ3 + θ4))
Berdasarkan rumus di atas, maka dapat diketahui posisi akhir dari ujung segment (head) berdasarkan koordinat (Xt, Yt). Rumus di atas dapat di sederhanakan menjadi:
Keterangan : Xt = posisi akhir ujung segment terhadap sumbu X Yt = posisi akhir ujung segment terhadap sumbu Y

Tabel 4.2 Data perhitungan manual posisi segment pada bidang kartesian berdasarkan input theta (satuan
dalam derajat)
Segment theta=5o theta=10o theta=15o theta=20o
x y x y x y x y
1 4,3578 49,81 8,68 49,24 12,94 48,296 17,101 46,985
2 8,68 49,24 17,101 46,985 25 43,3 32,14 38,302
3 12,94 48,29 25 43,3 35,35 35,35 43,3 25
4 17,101 46,985 32,14 38,302 43,3 25 49,24 8,68
Tabel 4.3 Data perhitungan simulasi posisi Segment pada bidang kartesian berdasarkan input theta(satuan
dalam derajat)
Segment theta=5o theta=10o theta=15o theta=20o
x y x y x y x y
1 4,3578 49,81 8,68 49,24 12,94 48,296 17,101 46,985
2 8,68 49,24 17,101 46,985 25 43,3 32,14 38,302
3 12,94 48,29 25 43,3 35,35 35,35 43,3 25
4 17,101 46,985 32,14 38,302 43,3 25 49,24 8,68
4.3. Evaluasi inverse kinematik untuk Pose Melingkar
Pada rumus inverse kinematik (3.1), sudut α untuk masing-masing folding linkage diperoleh berdasarkan perhitungan parameter-parameter yang saling berpengaruh pada setiap segment robot. Dalam menentukan manuver dari robot, penulis mendapatkan rumus untuk menhasilkan sudut maksimal dari robot agar dapat membentuk pose mendekati lingkaran.
Gambar 4.3 Rumus Perhitungan Pose Lingkaran
θ= 90 - a � a = 90 - θ θ1 = 90 - (a-θ) θ1 = 90 - (90 - θ- θ) θ1 = 2θ

Berdasarkan rumus di atas, penulis menentukan radius yang di bentuk robot dalam mencapai pose mendekati lingkaran adalah 100 (R=100, dalam satuan milimeter), dan jarak antar plate ( ) adalah 75 (dalam satuan milimeter). Selanjutnya, θ merupakan sudut yang harus dibentuk oleh garis pusat titik tengah robot (center of gravity, yang membentuk garis lurus) terhadap garis pelurus dari lingkaran. Namun, nilai θ tersebut hanya berlaku pada satu segment pertama saja. Sedangkan untuk segment–segment selanjutnya berlaku 2θ terhadap titik pusat massa dari segment sebelumnya. Perhitungan untuk nilai θ dapat di lihat pada gambar 4.10.
Grafik 4.2 Plot theta dan theta2 terhadap nilai R yang berbeda-beda
Setelah di lakukan perhitungan dengan nilai R = 100, maka didapatkan hasil bahwa nilai θ yang ideal agar robot dapat membentuk manuver menyerupai lingkaran adalah 22,020 . Secara teori, penulis dapat menyatakan bahwa apabila nilai R semakin besar, maka nilai θ yang di hasilkan juga akan semakin kecil, yang akan membuat robot membutuhkan waktu lama dan jumlah segment yang banyak untuk memcapai pose menyerupai lingkaran. Sebaliknya, jika nilai R semakin kecil, maka nilai θ juga akan semakin besar, namun hal ini tidak dapat dilakukan karena dalam simulasi di berikan batasan nilai θ maksimal, yaitu 120 agar tidak terjadi over constraint.
4.4. Evaluasi inverse kinematik pose Manuver
Pada pengujian melakukan simulasi, robot harus melakukan manuver yang terbagi menjadi dua macam manuver, yaitu gerakan maju secara normal dan gerakan maju sambil berbelok. Dalam bergerak maju secara normal, robot bergerak secara bergantian di mana per dua segment bergerak paralel dengan beda fase 180o antara segment ganjil dengan segment genap. Diasumsikan pada saat segment bergerak maju, maka bagian segment yang bersentuhan dengan bidang alas memiliki koefisien friksi minimum (mendekati nol), sedangakan ketika segment bergerak mundur, maka bagian segment yang bersentuhan dengan bidang alas memiliki koefisien friksi maksimum.

Gambar 4.4 Gerakan Maju secara normal di mana segment bergerak secara bergantian dengan
beda fase 180o (warna merah menunjukkan bagian segment yang bergerak maju)
Dalam melakukan manuver maju, robot melakukan gerakan: segment ganjil
dan genap bergerak secara bergantian dengan beda fase 180o antara keduanya.
segment II
segment I (tail)
segment III
segment IV (head)
segment IV
segment III
segment II
segment I
4 3 2 1
time step
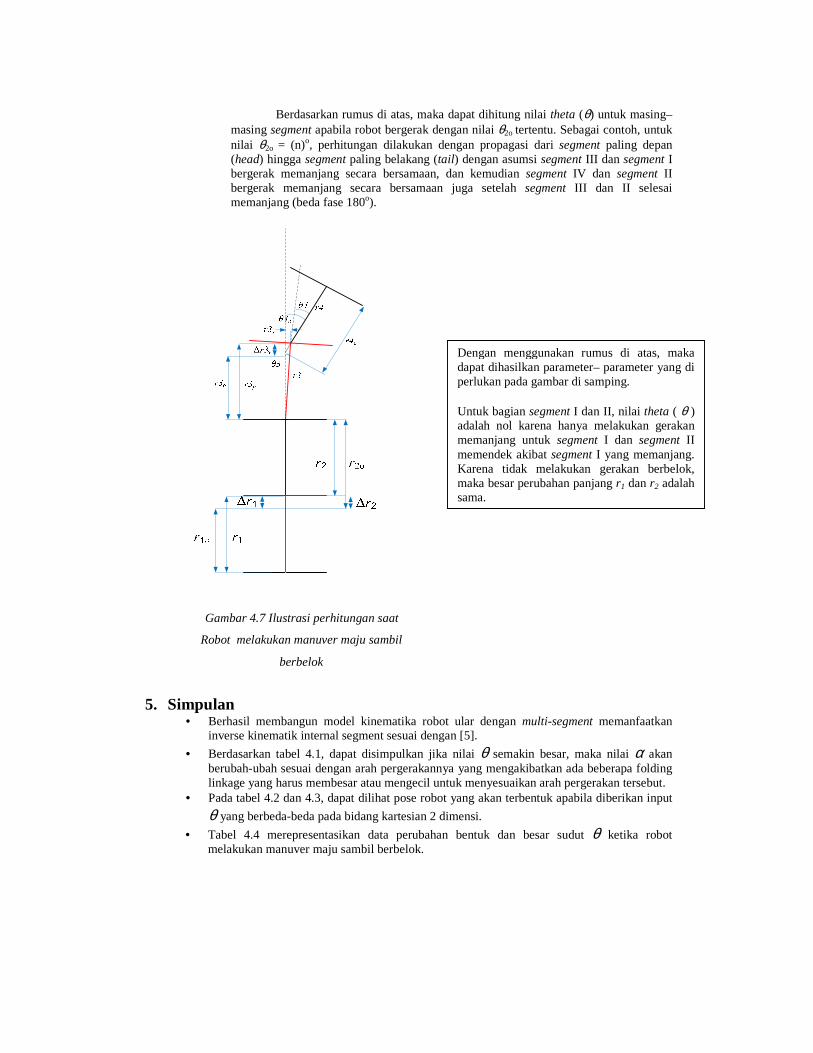
Gambar 4.5Tahapan Robot dalam melakukan manuver maju sambil berbelok secara
berurutan dari kiri ke kanan berdasarkan time step (1-4).
Keterangan Gambar 4.5: • Nilai ∆rmaksimal masing-masing segment adalah 20 mm • Perubahan nilai ∆r masing-masing segment dilihat berdasarkan time step yang
dibaca dari kiri ke kanan Grafik di atas di buat berdasarkan pergerakan di mana segment ganjil dan genap bergerak bergantian dengan beda fase 180o.
Dalam melakukan manuver maju sambil berbelok, robot harus melalui
beberapa tahap bersamaan dengan gerakan maju. Berikut ini adalah tahapan yang di lakukan robot: 1. Saat pasangan segment IV (head) dan segment II bergerak maju, maka bagian head
berbelok dengan sudut (n)o. 2. Gerakan selanjutnya disusul oleh pasangan segment III dan segment I (tail) yang
bergerak maju, sehingga secara perlahan akan membentuk pose seperti yang terlihat pada gambar 4.5.
Tabel 4.4 Data ∆ masing-masing segment ketika robot bergerak maju sambil berbelok
Time Step
1 2 3 4
Theta (o) r (mm) Theta (o) r (mm) Theta (o) r (mm) Theta (o) r (mm)
Segment 4 0 20,717 30 27,071 12.4 20,707 12.4 27,071 Segment 3 0 27,071 0 20,717 17.6 27,071 7.2 21,063 Segment 2 0 20,717 0 27,071 0 20,717 1 27,071 Segment 1 0 27,071 0 20,017 0 27,071 0 20,717
4 3 2 1
time step

Grafik 4.3 Plot ∆r terhadap waktu saat manuver maju sambil berbelok berdasarkan pergerakan pada gambar 4.9
Keterangan Grafik 4.3: • Nilai ∆r maksimal masing-masing segment adalah 20 mm • Perubahan nilai ∆r masing-masing segment dilihat berdasarkan time step yang
dibaca dari kiri ke kanan Grafik di atas di buat berdasarkan pergerakan pada gambar 4.5 di mana segment ganjil dan genap bergerak bergantian dengan beda fase 180o.
Berikut ini adalah sistematika perhitungan yang di lakukan dalam menentukan sudut yang harus dibentuk pada saaat robot bergerak maju sambil berbelok:
Gambar 4.6Model perhitungan saat Robot melakukan Manuver Maju sambil berbelok
Pada Gambar di atas, θ2o, r1, r1o dan r2o sudah diketahui, maka sistematika perhitungannya menjadi : θ2 = 180 – θ1 – (180 - θ2o) A = r10 B = tan θ2o
atau
θ2 = θ2o – θ1
Berdasarkan rumus di atas, maka dapat dihitung nilai theta (θ) untuk masing–masing segment apabila robot bergerak dengan nilai θ2o tertentu. Sebagai contoh, untuk nilai θ2o = (n)o, perhitungan dilakukan dengan propagasi dari segment paling depan (head) hingga segment paling belakang (tail) dengan asumsi segment III dan segment I bergerak memanjang secara bersamaan, dan kemudian segment IV dan segment II bergerak memanjang secara bersamaan juga setelah segment III dan II selesai memanjang (beda fase 180o).
5. Simpulan • Berhasil membangun model kinematika robot ular dengan multi-segment memanfaatkan
inverse kinematik internal segment sesuai dengan [5].
• Berdasarkan tabel 4.1, dapat disimpulkan jika nilai θ semakin besar, maka nilai α akan berubah-ubah sesuai dengan arah pergerakannya yang mengakibatkan ada beberapa folding linkage yang harus membesar atau mengecil untuk menyesuaikan arah pergerakan tersebut.
• Pada tabel 4.2 dan 4.3, dapat dilihat pose robot yang akan terbentuk apabila diberikan input
θ yang berbeda-beda pada bidang kartesian 2 dimensi.
• Tabel 4.4 merepresentasikan data perubahan bentuk dan besar sudut θ ketika robot melakukan manuver maju sambil berbelok.
Gambar 4.7 Ilustrasi perhitungan saat
Robot melakukan manuver maju sambil
berbelok
Dengan menggunakan rumus di atas, maka dapat dihasilkan parameter– parameter yang di perlukan pada gambar di samping. Untuk bagian segment I dan II, nilai theta ( θ ) adalah nol karena hanya melakukan gerakan memanjang untuk segment I dan segment II memendek akibat segment I yang memanjang. Karena tidak melakukan gerakan berbelok, maka besar perubahan panjang r1 dan r2 adalah sama.

Referensi
1 Murphy, R. R. (2004). Trial By Fire. IEEE Robotics and Automation Magazine, 50-61. 2 Hopkins, J. K., Spranklin, B., & Gupta, S. (2009). A survey of Snake-inspired Robot Designs. 3 Kinagasa, T., Otani, I., Haji, T., Yoshida, K., Osuka, K., & Amano, H. (2010). Flexible
Monothread Mobile Track (FMT). Robotics 2010: Current and Future Challenges, 241. 4 Borenstein, J., Hansen, M., & Borrell, A. M. (2007). The OmniThread OT-4 Serpentine Robot -
Design and Performance. Journal of Field Robotics, 601. 5 Behrens, R., Kuchler, C., Forster, T., & Elkmann, N. (2011). Kinematik Analysis of a 3-DOF
Joint for a Novel Hyper-Redundant Robot Arm. IEEE International Conference on Robotics and Automation, (p. 3224). Shanghai
Riwayat Penulis Daniel lahir di Serang pada tanggal 27 April 1991. Penulis menamatkan pendidikan S1 di Universitas Bina Nusantara dalam bidang Sistem Komputer pada tahun 2012. Mohammad Iman Alamsyah lahir di Malang pada tanggal 1 Mei 1990. Penulis menamatkan pendidikan S1 di Universitas Bina Nusantara dalam bidang Sistem Komputer pada tahun 2012 Erwin lahir di Pontianak pada tanggal 27 April 1990. Penulis menamatkan pendidikan S1 di Universitas Bina Nusantara dalam bidang Sistem Komputer pada tahun 2012


















