Modelling animal movement in complex environments Jonathan Potts, University of Leicester, 24 th...
48
Modelling animal movement in complex environments Jonathan Potts, University of Leicester, 24 th September 2014.
-
Upload
heather-shelton -
Category
Documents
-
view
214 -
download
0
Transcript of Modelling animal movement in complex environments Jonathan Potts, University of Leicester, 24 th...

Modelling animal movement in complex environments
Jonathan Potts, University of Leicester, 24th September 2014.

What complex environment?
Resources Topography Predators Conspecifics
Stigmergent cues
Human constructions

Roadmap

Roadmap
1. Model construction

Roadmap
1. Model construction2. Inference

Roadmap
1. Model construction2. Inference3. Goodness-of-fit

Roadmap
1. Model construction2. Inference3. Goodness-of-fit


Movement: correlated random walkExample step length distribution:
Example turning angle distribution:
Turchin P. (1998) Quantitative analysis of movement:measuring and modeling population redistribution in animals and plants. Sunderland, MA: SinauerAssociates.

Mathematical formulation
Probability of moving to position x in time given that the animal was previously at position y and arrived there on a trajectory is:
where is the step length distribution and the turning angle distribution.


Adding environmental interactions

Adding environmental interactions
A, B, C different habitats. B = worse, A = better, C = best.

The step selection function
• is the step length distribution,• is the turning angle distribution• is a weighting function• E is information about the environment
Fortin D, Beyer HL, Boyce MS, Smith DW, Duchesne T, Mao JS (2005) Wolves influence elk movements: Behavior shapes a trophic cascade in Yellowstone National Park. Ecology 86:1320-1330.


Coupled step selection functionsOne step selection function for each agent and include an interaction term :
where represents animali’s cognitive map of the possible positions of other animals at time t.
Potts, J.R., Mokross,K.,&Lewis, M.A. (2014) A unifying framework for quantifying the nature of animal interactions. Journal of the Royal Society Interface, 11, 20140333.
Scent marks
MateCompetitor

An example CSSF
Potts, J.R., Mokross,K.,&Lewis, M.A. (2014) A unifying framework for quantifying the nature of animal interactions. Journal of the Royal Society Interface, 11, 20140333.

Unifying collective behaviour and resource selection
Potts, J.R., Mokross,K.,&Lewis, M.A. (2014) A unifying framework for quantifying the nature of animal interactions. Journal of the Royal Society Interface, 11, 20140333.

Roadmap
1. Model construction2. Inference3. Goodness-of-fit

Coupled step selection functions
Detecting the interaction mechanism
Model 1 Model 2 Model 3 Model 4
Positional data

Detecting the interaction mechanism
Maximum likelihood: Find the that maximises:
• and are, respectively, the sequence of positions and trajectories from the data
• is the number of animals• is a vector of parameters in the model• Test for different models ,, ,… to find best

Coupled step selection functionsOne step selection function for each agent and include an interaction term :
where represents both the population positions and any traces of their past positions left either in the environment or in the memory of agent .
Potts, J.R., Mokross,K.,&Lewis, M.A. (2014) A unifying framework for quantifying the nature of animal interactions. Journal of the Royal Society Interface, 11, 20140333.

Detecting the interaction mechanism: the example of Amazonian birds
Territorial marking (vocalisations): if any flock is at position at time totherwise.
Hypothesis 1 (tendency not to go into another’s territory):
Hypothesis 2 (tendency to retreat after visiting another’s territory):
where is a von Mises distribution, is the bearing from to and is the bearing from to a central point within the territory and if X is true and 0 otherwise.

Detecting the interaction mechanism: the example of Amazonian birds
Territorial marking (vocalisations): if any flock is at position at time totherwise.
Hypothesis 1 (tendency not to go into another’s territory):
Hypothesis 2 (tendency to retreat after visiting another’s territory):
where is a von Mises distribution, is the bearing from to and is the bearing from to a central point within the territory and if X is true and 0 otherwise.

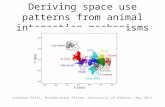
Amazon birds: space use patterns
between competing models

Roadmap
1. Model construction2. Inference3. Goodness-of-fit

High-school data analysis: best fit line

Check: look at the residuals
Zuur et al. (2009) Mixed effects models and extensions in ecology with R. Springer Verlag
“Residual”: the distance between the model prediction and the data

Try again: best fit quadratic

How do we extend these ideas to movement models?
Generic movement model: probability of moving to x at a time τ in the future given that the agent is currently at y and is travelling through environment E is

e.g. food distribution
e.g. topography
Start

e.g. food distribution
e.g. topography
Actual move

Earth mover`s distance: a generalised residual
• is the actual place the animal moves to
∫Ω
❑
𝑓 (𝑥|𝑦 ,𝐸 )∨𝑥−𝑥0∨𝑑𝑥

Earth mover`s distance: a generalised residual

Earth mover`s distance: a generalised residual
• is the actual place the animal moves to
∫Ω
❑
𝑓 (𝑥|𝑦 ,𝐸 )∨𝑥−𝑥0∨𝑑𝑥

Standardised earth mover`s distance

How close is your model to the data?
Test the following null hypothesis:
H0: “The data is a stochastic realisation of the model”

A scheme for testing how close your model is to data
• Suppose you have N data points

A scheme for testing how close your model is to data
• Suppose you have N data points• Simulate your model for N steps and repeat M times, where M is
nice and big

A scheme for testing how close your model is to data
• Suppose you have N data points• Simulate your model for N steps and repeat M times, where
M is nice and big• For each simulation, generate the Earth Movers distance
(EMD)

A scheme for testing how close your model is to data
• Suppose you have N data points• Simulate your model for N steps and repeat M times,
where M is nice and big• For each simulation, generate the Earth Movers distance
(EMD)• This gives a distribution of simulation EMDs

A scheme for testing how close your model is to data
• Suppose you have N data points• Simulate your model for N steps and repeat M times, where M
is nice and big• For each simulation, generate the Earth Movers distance (EMD)• This gives a distribution of simulation EMDs• Also calculate EMD between data and model ED

A scheme for testing how close your model is to data
• Suppose you have N data points• Simulate your model for N steps and repeat M times, where
M is nice and big• For each simulation, generate the Earth Movers distance
(EMD)• This gives a distribution of simulation EMDs• Also calculate EMD between data and model ED
• If ED is not within 95% confidence intervals of the distribution of simulation EMDs then reject null hypothesis that model describes the data well

Power test on simulated data
F(x) T(x)
Researcher knows about
layer 1
Researcher doesn’t know about layer 2

Power test on simulated data
“Real” process: Best model:
F(x) T(x)
Researcher knows about
layer 1
Researcher doesn’t know about layer 2

Power test on simulated data
Potts JR, Auger-Méthé M, Mokross K, Lewis MA. A generalized residual technique for analyzing complex movement models using earth mover's distance. Methods Ecol Evol DOI: 10.1111/2041-210X.12253

Application to Amazonian birds: patterns in EMD

Acknowledgements Mark Lewis (Alberta)
Marie Auger-Méthé (Dalhousie) Karl Mokross (Louisiana State)
Thomas Hillen (Alberta)