Lush Weber Anand 1989
29
International Journal of Plasticity, Vol.5. pp. 521-549. 1989 0749-6419/89$3.00 + .00 Printed in the U.S.A. Copyright "~ 1989 PergamonPress pie AN IMPLICIT TIME-INTEGRATION PROCEDURE FOR A SET OF INTERNAL VARIABLE CONSTITUTIVE EQUATIONS FOR ISOTROPIC ELASTO-VISCOPLASTICITY A.M. LUSH, G. WEBER, and L. ANAND Massachusetts Institute of Technology Abstract-In the past decade or so, a substantial body of work on state variable constitutive equations for elasto-viscoplasticity has appeared in the literature. Such constitutive equations are known to be numerically very stiff. In this paper we formulate a fully implicit, Euler back- ward time-integration procedure for a set of internal variable constitutive equations for isother- mal, isotropic elasto-viscoplasticity with isotropic hardening. The time-integration procedure is a generalization of the well-known "radial-return" algorithm of classical rate-independent plasticity, and it should therefore be well suited for implementation in large-scale finite dement codes. As an example, we have implemented the procedure in the finite element code ABAQUS, and using a set of specific constitutive equations, we show the results of two sample problems. !. INTRODUCTION It has long been recognized that the notion of rate-independence of plastic response is only a convenient approximation at low homologous temperatures. In actuality, plas- tic flow due to dislocation motion is inherently rate-dependent (e.g., Gn.so.N [1966]) even at low temperatures. Various extensions of the classical theories of plasticity to model rate-dependent behavior have been proposed in the literature. We find the state variable formulation of Rice [1970,1971,1975] most attractive because of its strong physical basis. For a recent large deformation, state variable formulation of a rate- dependent model see A~'qAm)[1985]. This rate-dependent model, along with other sim- ilar models in the literature, differs from the classical rate-independent "./2 flow theory" in that there is no yield condition, and no loading/unloading criterion is used. Instead, plastic flow is assumed to occur at all nonzero values of stress, although at low stresses the rate of plastic flow may be immeasurably small. Further, the equivalent plastic grain rate is prescribed by an appropriate constitutive function in the rate-dependent model, whereas it is determined by the consistency condition in the rate-independent model. For the case of isothermal, isotropic elasto-viscoplasticity, the state of a material ele- ment is characterized in Anand's model by the Cauchy stress T, and a scalar internal variable called the isotropic deformation resistance. This scalar state variable is denoted by s (for state), and taken to have the dimensions of stress. The rate-dependent model then consists essentially of a coupled set of differential evolution equations for the state variables (T,s). In general, the differential evolution equations for stress and deformation resistance can only be integrated by numerical means. Constitutive equations of this type have long been known to be numerically very stiff (e.g., KRn~G [1977]; Sttm et ai. [1977]). With an explicit Euler forward time-integration procedure, the size of the time increment is generally restricted by numerical stability requirements (Copa~.Au [1975]). Although the 521
-
Upload
chandra-clark -
Category
Documents
-
view
244 -
download
0
description
wedfdeweffe
Transcript of Lush Weber Anand 1989

International Journal of Plasticity, Vol. 5. pp. 521-549. 1989 0749-6419/89 $3.00 + .00 Printed in the U.S.A. Copyright "~ 1989 Pergamon Press pie
A N I M P L I C I T T I M E - I N T E G R A T I O N P R O C E D U R E F O R A S E T O F I N T E R N A L V A R I A B L E C O N S T I T U T I V E E Q U A T I O N S
F O R I S O T R O P I C E L A S T O - V I S C O P L A S T I C I T Y
A.M. LUSH, G. WEBER, and L. ANAND
Massachusetts Institute of Technology
Abs t r ac t - In the past decade or so, a substantial body of work on state variable constitutive equations for elasto-viscoplasticity has appeared in the literature. Such constitutive equations are known to be numerically very stiff. In this paper we formulate a fully implicit, Euler back- ward time-integration procedure for a set of internal variable constitutive equations for isother- mal, isotropic elasto-viscoplasticity with isotropic hardening. The time-integration procedure is a generalization of the well-known "radial-return" algorithm of classical rate-independent plasticity, and it should therefore be well suited for implementation in large-scale finite dement codes. As an example, we have implemented the procedure in the finite element code ABAQUS, and using a set of specific constitutive equations, we show the results of two sample problems.
!. INTRODUCTION
It has long been recognized that the notion of rate-independence of plastic response is only a convenient approximation at low homologous temperatures. In actuality, plas- tic flow due to dislocation motion is inherently rate-dependent (e.g., Gn.so.N [1966]) even at low temperatures. Various extensions of the classical theories of plasticity to model rate-dependent behavior have been proposed in the literature. We find the state variable formulation of Rice [1970,1971,1975] most attractive because of its strong physical basis. For a recent large deformation, state variable formulation of a rate- dependent model see A~'qAm) [1985]. This rate-dependent model, along with other sim- ilar models in the literature, differs from the classical rate-independent "./2 flow theory" in that there is no yield condition, and no loading/unloading criterion is used. Instead, plastic flow is assumed to occur at all nonzero values of stress, although at low stresses the rate of plastic flow may be immeasurably small. Further, the equivalent plastic grain rate is prescribed by an appropriate constitutive function in the rate-dependent model, whereas it is determined by the consistency condition in the rate-independent model.
For the case of isothermal, isotropic elasto-viscoplasticity, the state of a material ele- ment is characterized in Anand's model by the Cauchy stress T, and a scalar internal variable called the isotropic deformation resistance. This scalar state variable is denoted by s (for state), and taken to have the dimensions of stress. The rate-dependent model then consists essentially of a coupled set of differential evolution equations for the state variables (T,s).
In general, the differential evolution equations for stress and deformation resistance can only be integrated by numerical means. Constitutive equations of this type have long been known to be numerically very stiff (e.g., KRn~G [1977]; Sttm et ai. [1977]). With an explicit Euler forward time-integration procedure, the size of the time increment is generally restricted by numerical stability requirements (Copa~.Au [1975]). Although the
521

522 A . M . t . u s H et aL
Euler forward procedure is easily implemented for elasto-viscoplastic problems (e.g., ZIENKIEWICZ & CORMEAU [1974]; WILLIAM [1978]; ARGYRtS et al. [1978]; KUMAR et al.
[1980]; TELLES & B~BStA [1982]; CHANDRA & MUKrmRJEE [1984]), this advantage is gen- erally offset by the need for an excessive number of solution increments when a large deformation finite element analysis is performed.
To overcome the stability-related time increment restrictions inherent in the Euler for- ward method, a number of authors (e.g., MILLER & SHIH [1977]; SHIH et al. [1977]; KAS- CHI et al. [19781; WILLIAM [1978]; ARGYRIS et al. [1978]; OWEN & HINTON [19801; ZIRIY 8̀ KREMPL [1982]; PEIRCE et al. [1984]; ANAND et al. [1985]; TANAKA 8̀ MILLER [1987]) have described semi-implicit time-integration schemes whereby implicit solution proce- dures, such as the generalized trapezoidal method, are approximated using two-term Taylor's series expansions of the relevant constitutive functions about the (known) initial state. These "forward gradient" schemes allow much larger time increments without encountering stability problems or requiring constitutive level iterations. Their shortcom- ing, though, is that their accuracy severely deteriorates if large time increments are taken during periods of rapidly changing conditions because the simple, two-term Taylor's series expansions become inaccurate. Consequently, it is still necessary to control the time increment size very carefully with these schemes in order to obtain an accurate solu- tion (e.g., ANAND et al. [19851).
Various implicit time-integration schemes requiring constitutive level iteration have been proposed in the literature (e.g., HUGHES 8̀ TAYLOR [1978]; ARGYRIS et al. [1978]; SNYDER & BATHE [1981]; TAYLOR 8̀ BECKER [1983]; LUSH ~ ANAND [1986]; CORDTS 8, KOLLMA~r~ [1986]). A general characteristic of these schemes is that they can be made unconditionally stable and are heavily damped, allowing them to span periods of rap- idly changing viscoplastic flow conditions with reasonable accuracy. Accordingly, the requirement of careful time increment size control that is associated with the forward gradient schemes can be somewhat relaxed. Consequently, for typical large deforma- tion analyses it is possible to improve the computational efficiency significantly by using implicit methods, with little loss of accuracy. To realize this goal though, it is necessary to employ a robust and efficient iterative scheme at the constitutive level. The purpose of this paper is to formulate a fully implicit, robustly stable and efficient time- integration procedure for implementing Anand's single scalar internal state variable model in displacement-based finite element procedures. (Such a scheme was first out- lined in the paper by LUSH 8̀ ANAND [1986].) Emphasis is placed on analyzing large deformation, isothermal, hot metal working problems, by using the Euler backward time-integration procedure. This procedure is ideally suited for this application, where for reasons of efficiency it is desirable to take relatively large strain increments com- pared to the elastic strains, which are typically very small (of order 0.05o70). Further, the Euler backward procedure is a generalization of the well known "radial-return" algo- rithm of classical rate-independent plasticity (e.g., WILKINS [1964]; Kamo & KEy [1976]; KRtEG ~ KRmG [1977]; SCH~YER et al. [1979]), and it should therefore be well suited for implementation in large-scale finite element codes. We have implemented it in the commercial, general-purpose finite element program ABAQUS (e.g., Hmarrr [1984]).
The plan of this paper is as follows. First we review the basic structure of the isother- mal rate-dependent constitutive model in section 2. The evolution equation for stress employs the Jaumann derivative which renders this model properly frame-indifferent. Next, we define a rotation tensor and use it to transform the constitutive equations into a form which makes the time-integration of the evolution equations straightforward. In section 3 we detail the time-integration algorithm for updating the state variables (T,s).

Time-intelltatlot~ procedure 523
In section 4 we calculate the required constitutive contributions to the Jacobian matrix for a global, Newton type equilibrium iteration scheme for an "implicit" finite element code. Some important aspects of the implementation in ABAQUS are discussed in sec- tion 5. In this section, we also show the results of uniaxial tests plus two sample metal forming problems: (a) isothermal upset forging of a cylindrical billet with sticking fric- tion at rigid dies; and (b) plane-strain forging of a circular cylindrical billet to form a cruciform shape. The specific constitutive functions used in these example problems are the isothermal versions of the functions proposed recently by BgowN, KIM ~, A~Ar~D [19891 for high temperature deformations.
!!. CONSTITUTIVE EQUATIONS
Attention in this paper is focussed on isothermal constitutive equations for isotropic metals with isotropic hardening, for which the state variables are taken to be (AsAND [19851):
(T,s), (1)
where T is the Cauchy stress, and s is a scalar internal variable with dimensions of stress, called the isotropic deformation resistance. The internal variable s represents an aver- aged isotropic resistance to macroscopic plastic flow offered by the underlying "isotro- pic" strengthening mechanisms such as dislocation density, solid solution strengthening, subgrain and grain size effects, etc.
The evolution equations for the state variables are:
1. Evolution equation for the stress T:
T v = ,g [D - D p] (2)
where T v -" 2" - WT + TW
,~ -= 2#~1 + Ix - (2/3)#1 1 ® 1 /g,K
L " grad v D E sym (L) W - skew (L)
1
Jaumann derivative of Cauchy stress T; material time derivative of Cauchy stress T; fourth order isotropic elasticity tensor; elastic shear and bulk moduli; spatial gradient of the velocity v; stretching tensor; spin tensor; fourth order identity tensor; second order identity tensor.
The constitutive equation for D p, that is the f low rule, is:
D p = 3 ~ P N , (3)
where with T' the deviator of the Cauchy stress, and
# - ~/(3/2)T' .T; (4)

524 A. NI. LUSH et al.
the equivalent tensile stress,
N --- ~3 /2 (T ' / 6 ) (5)
is the direction of plastic flow. Also, 6P is the equivalent tensile plastic strain rate prescribed by a constitutive function
~P = f (O , s ) . (6)
2. Evolution equation f o r the internal variable s:
= g(O,s) . (7)
To complete this rate-dependent constitutive model for a particular material the mate- rial properties/functions that need to be specified are the elastic shear and bulk moduli, /~ and r, respectively; the constitutive function (6) for the equivalent tensile plastic strain rate; and the initial value and evolution function (7) for the deformation resistance. Even for a particular material it is not expected that the same constitutive functions for ~P and s will be appropriate for all values of strain rates and temperatures. Indeed, dif- ferent particular forms for these functions will in general be necessary for different regimes of strain rate and temperature. These forms should reflect the dominant fea- tures of the underlying microstructural mechanisms which govern the material response in the regime under consideration.
Note that in this rate-dependent model there is no switching parameter which turns plastic flow off or on; plastic flow is assumed to occur at all nonzero values of stress. Further, the equivalent plastic strain rate, which is determined by the consistency con- dition in the classical J2 rate-independent model, here needs to be prescribed by a con- stitutive function. Since there is no yield condition to be satisfied in the rate-dependent model, there is also no consistency condition which needs to be satisfied in this model. The overall mathematical structure of this rate-dependent model is simpler than the clas- sical J2 rate-independent model because the plastic flow rule is a smooth function, although the particular form of the constitutive function for ~P may be mathematically very stiff in certain regions of plastic flow, requiring special care in formulating time- integration algorithms.
A transformation o f the constitutive equations. Let the current configuration of the body be the configuration at time t, and a subsequent configuration be the configura- tion at time r, with z > t. Next, let Q(g') be the rotation tensor which is defined to be the solution of the initial-value problem
Q(~-) =w(~-)Q(~-) , t < ~ - < r , (8)
Q(t ) = 1, (9)
IAlthough these equations do not employ a yield condition, and associated loading, neutral-loading and unloading criteria, by the use of appropriate forms of the equivalent plastic strain rate function, this rate- dependent model can be made to simulate nearly rate-independem material behavior.

Time-integration procedure 525
where W(~') is the spin tensor. Using rotations Q(l') soMef'med, we define the bar trans- formation of a symmetric second-order spatial tensor A(~') by
.~(~-) - Qx(~')At~')Q(~'). (10)
Then, upon using (8) and (10) we have the important result
~(~-) = QT(~')TV(~')Q(~'). (1 I)
Next, using (I0), (I I), the isotropy of .~, and the isotropy of the other constitutive functions, we obtain the following set of bar-transformed equations:
1. Evolution equation for the stress T:
"~ = - e . [b - D P ] , (12)
with
where
D p = x/~-2~PN, (13)
~1 = 3 ~ ( T ' / # ) , (14)
0 = ~/(3/2)T'.T; (15)
6P = f (0 , s ) . (16)
2. Evolution equation for the deformation resistance s:
= g(O,s). (17)
Note that after transformation, the evolution equation for stress involves only the material time derivative of i" instead of the more complicated Jaumann derivative of T. Such a transformation has previously been used by REED a ATLtmI [1983] and NAG- TEGAAL & VELDPAU$ [1984] (see also, HUGHES [1984]; WEaER [1988]). Nagtegaal and Veldpaus call the bar-transformed quantities "rotation-neutralized" quantities. Regard- less of terminology, after transformation the constitutive equations take on a simple form which greatly aids the time-integration procedure.
I!!. TIME-INTEGRATION PROCEDURE
A procedure for integrating the evolution eqns 02) and (17) over a generic time incre- ment of length 4 t in an incrememal finite element analysis is presented here. Previously, we have defined the current configuration of the body as the configuration at time t,

526 A.M. L us~ et al.
and the subsequent configuration as the configuration at time 7". For this section it is more convenient to make the following identifications
tg I ~ ts
l n + 1 E 7",
to indicate the incremental nature of the time-integration procedure, with
In+ I = t n + A t .
Accordingly, subscripts 'n' and 'n + 1' on variables indicate that the variables are eval- uated at times t~ and t.+~, respectively.
It is assumed that the initial state (T.,s~) is known, with T~ = T~ (see eqns (9) and (10)). Our goal then is to determine the state (Tn+~ ,s.+~), and thus march the solution forward in time. Using eqns (10), (12), (13), and (17) we obtain:
(18)
f t n + l
s~+l = sn + s dt. (19) ¢1
Here Qn+l is the rotation of the configuration at time t.+~ relative to the configuration at time t~. It is given by the solution to the initial-value problem of eqns (8)and (9), evaluated at time tn+l.
Using the Euler backward method o f integration, the isotropy of ,g, and assuming that l~ is constant across a time increment, the solution of eqns (18) and (19)may be written as
(20)
s~+l = s . + Atg(#~+l,Sn+l), (21)
where
with
Tn+l = i"~ + .g[zlE], (22)
T~ T r -~ Q~+I .Q~+l, (23)
and
If, AE E Q.+t D dt t. i
(24)
The rotation Qn+, and the strain increment AE are computed from the configura- tions of the body at tn and t~+j since these are the only data. Here, without going into

Time-integration procedure 527
the details of the computations of these quantities from the incremental kinematics, we suppose that in the constitutive time-integration routine of a displacement-based finite element program, 1". and zl E are provided as inputs (we will come back to this point in Section V). Thus, T]+~ can be calculated directly at the beginning of the solution process. To update the state variables using (20) and (21), we need to calculate Nn+t, ~+~ =f(#.+~,s.+~) and s.+t. We show next that N.+I is known in terms of T,~+~, and hence it is also known at the beginning of the solution process. Therefore, the time- integration problem reduces to determining s.+~ and #.+1.
Taking the deviatoric part of (20), using T;,+, = 2 ~ 0 . + ~ N.+~ and rearranging, we obtain
( 2~#.+t + q-6#At~ p , )N.+, = T~.,. (25)
which shows that N.+~ is parallel in direction to T*~.~. Hence
Nn+, = T.+,/IIT.+,II = 3 ~ ( T . + t / a n + , ) . (26)
where
8,~+1 - ~ / (3 /2)T.+x *' * ' . T n + I . (27)
Equation (26) may be rearranged to read
T~,+l = ~.+lT,~+l, (28)
where ~n+l " 0n+l/O',~+l • (29)
By analogy to the radial-return method for the classical J2 flow theory, the factor r/.+l may be called the "radial-return" factor.
Next, from the deviatoric part of (20) we obtain
(30)
Thus, from (21) and (30) the problem reduces to solving for s.+l and O.+l from the pair of scalar equations
s.+l - s. - Atg(#.+~ ,s.+~) = 0, (31)
#.+l - ~n+l + 3gAtf(O.+l,S.+l) = 0. (32)
In the Appendix we suggest a two-level iterative method for obtaining the solution for a large class of functions f and g.
Summary o f time-integration procedure
Step 1. Assume that T. and zlE are given. Calculate T*+I:
T*+~ = T. + JB[AEI.

528 A. 5,1. LUSH et al.
Step 2. Calculate the deviatoric part of TT,+, :
T2~-) = T,~+l -- (1/3)(trT~,+l)l.
Step 3. Calculate ~.+i.'* "
o.+t ~(3/2) .+l"T.+l.
Step 4. Calculate s.+t and 0.+1 by solving
s .+1 - s . - A t g ( O , , . l , s . + l ) = O,
~ . # . + I - o . + l + 3 # z l t f ( # . + 1 , S . + l ) = O.
Step 5. Calculate the radial-return factor ~.+1:
4 "
~ n + l : ~ n + l / f f n + l •
Step 6. Update the stress:
T.+l = rl.+lT~*~-i + (l/3)(trT~,+,)l .
A few comments are in order regarding the accuracy of the Euler backward method of integration when applied to eqns (18) and (19). First, note that the strain increment /t E represents only the time-averaged stretching during the increment (see eqn (24)). This time averaging is inherent in any incremental finite element analysis. Therefore, since we have an elasto-viscoplastic material that can be sensitive to the time history of D, care must be taken not to average out any important details of the stress time history by taking time increments that are too large. However, for typical large deformation metal forming analyses, relatively large time and strain increments can be taken with satisfactory accuracy, without having to monitor the fluctuations in D. This will be illus- trated in the example calculations of Section 5. On the other hand, for problems such as shear band formation, the stretching 9 can vary rapidly and small time increments are essential. In such cases with small time increments, other time-integration methods such as the forward gradient method (e.g., ASAr~D e t a l . [1985]) are more accurate and efficient.
Next we concentrate on the accuracy of the deviatoric part of eqn (20), noting that the volumetric part is hypoelastic and is integrated exactly for our constitutive model with incompressible plastic flow. For D' constant across an increment, the deviatoric part of eqn (20) can be rewritten as
A t ( 9 ' -- 9.P+~) = ( ~ ) (1";,+1 -- ~';,).
Here we note that the right hand side is the elastic deviatoric strain increment, which is bounded and generally very small. Therefore, we expect that 9~+1 --" D' as At increases. But physically, this is the precise behavior of the constitutive equations in the

Time-integration procedure 529
case of constant s. To see this, note that we can rewrite the bar-transformed evolution equation for the deviatoric stress as follows:
This is recognized as a first-order, nonlinear, ordinary differential equation, with pos- itive coefficients and (for a constant D' across a time step) a constant "forcing term" on the right side. For typical functions f , the solution of this equation with arbitrary initial conditions consists of a rapid asymptotic approach to the steady-state stress T~ at which B p = D' and ~' = 0, with no overshoot or oscillations because this is a first order differential equation. Experience with this equation indicates that the asympto- tic approach B p -~ D' is very close as long as A t is large enough to give a strain incre- ment AE ' (~ A tD') that exceeds significantly the elastic strain increment (T~ - i",.' ) / 2~, where T; is the initial value of T' for the above differential equation. Thus, it may be concluded that the Euler backward result for [)~+~ approaches the analytical behav- ior for large strain increments, and therefore the Euler backward result for stress Tn+~ must also approach the exact solution because the plastic stretching is a direct function of stress in the case of constant s. This conclusion is consistent with the observations made by HuGH~S ~, TA:O_OR [1978].
Consider next what happens when s evolves during the increment. The Euler back- ward result for sn+~ will have some error because the function g generally varies dur- ing an increment, whereas a constant value is assumed in using eqn (21). Although eqn (20) still gives the DP+~ ~ D' as A t increases, this only suffices to give the correct direction for the stress 1";,+~. The magnitude of this stress will generally be slightly in error due to the approximate solution for s~+~. As will be shown in Section V, this error may be controlled by limiting the size of the equivalent tensile plastic strain incre- ments, where the equivalent tensile plastic strain is defined, as usual, by
~0 t ~P(t) = ~P dt.
IV. JACOBIAN MATRIX
In typical "implicit" finite element procedures which use such nonlinear constitutive models, the discretized (weak form of the) balance equation for linear momentum gen- erates an estimated incremental motion which is used to calculate the integration point values of the stress T and the deformation resistance s at the end of the increment. If these stresses do not satisfy the momentum balance equation at the end of the incre- ment, then the estimated incremental motion is revised and new end of increment stresses are calculated; iteration continues until the momentum balance equation is satis- fied to within acceptable tolerances. For a Newton type iterative method for revising the estimated incremental motion, one needs to compute a consistent Jacobian matrix. As emphasized by H u o ~ s [1984], Jacobian matrices are used only in the search for the incremental motion that leads to satisfaction of the momentum balance equation, but in the end have no effect on the accuracy of the solution. However, in order to achieve the quadratic convergence which is characteristic of Newton's method, it is important

530 A.M. Lush et aL
to evaluate this linearized form accurately (NAGTEGAAL & VELDPAUS [1984], StMo ~ TAY- LOR [1985]). In this section we calculate the constitutive contribution
0 e ( r ) -= T ( r ) (33)
OzlE
to the Jacobian matrix for a global Newton type equilibrium iteration scheme. From (20),
[ 0 0 ] e ( r ) = 0A---E0 T*(r) - (x/-6t~zlt) N( r ) ® 0 - ~ ~P(r) + ~P(r) ~ N(r ) . (34)
Using (22), (26), and (27) straightforward calculations using the approximation: that Q ( r ) is not influenced by a variation in AE, give
T*(r) -~ .~, (35) OAE
0 - - 6*(r) = 3 ~ M ( r ) , (36) OAE
0 N( r ) • ( ~ t [2~(~ - ( 1 /3 )1@ 1) - N ( r ) @ M(r ) ] , (37)
where
M( r ) m ~ [ N ( r ) ] = 2/xN(r). (38)
Next, linearization of (30) gives
dO(r) = dO*(r) - 3~A tddP(r ) . (39)
The quantity dO(r) is obtained by linearizing (31) and (32) and solving the resulting pair of equations. This gives
dO(r) = c ( r ) d # * ( r ) , (40)
where
( b i l l -~, c(r) = [a~ + a~\~/ ) (41)
2As shown by WEnER [1988], in order to compute a fully consistent Jacobian, the variation in Q(T) with A E should be taken into account. However, for purposes of implementing our algorithm in ABAQUS, we have had to make this approximation because the complete kinematic information required to implement the exact Jacobian is not available to the user.

Time-integration procedure 531
with
0 at " 1 + 31~At ~o fl,, (42)
0 a2 = 3t~at ~s f l - (43)
0 bl = At ~-~ gl,, (44)
b2 --- I - A t O gl,- (45)
Substituting for d#(r) from (40) into (39), solving for dlP(r) and using (36) we obtain
~u(r) = (46) OAE a t l 3 # ( l - c ( r ) ) - t I
Finally, substituting (35), (37), and (46) into (34), using (38) and rearranging, we obtain
~ ( r ) = ,l~(r) - ( 3 / 2 ) g ( r ) - I M ( r ) ® M(r ) , (47)
where
~ ( r ) -= 2/2(r)(9 - ( 1 / 3 ) 1 ® 1) + x l ® 1,
~(r ) -= ,7(r)t~,
(48)
(49)
( 3~At~P(T) 8( r ) 7/(r) -- [1
+ 3 t p(7) '
gtr)-'=-(~-~)l~tr)-c(r)l, (51)
M( r ) = -~.[N(r)] = 2/~N(r). (52)
Note that ~(7) is the radial-return factor defined in eqn (29). For programming purposes it is useful to rewrite ~ ( r ) as
e ( r ) = 2t~(r)~l + {K - ( 2 / 3 ) M r ) l l ® 1 - 2t~l~(r) - c(r ) lN(r ) ® N(r ) . (53)
Note that as A t --, 0, e --, £ . When the time step is sufficiently large, the difference between these two moduli can be substantial. Use o f the moduli d~ instead o f the moduli e in the Newton procedure can lead to very slow convergence.

532 A . M . Lush e t al.
V. IMPLEMENTATION AND NUMERICAL EXAMPLES
The constitutive equations and time-integration procedures described in this paper have been implemented in the implicit finite element code ABAQUS (Version 4.5-159) (e.g., HmmTX [1984]) by writing a "user material" subroutine. This subroutine, named UMAT, is called once for each integration point in the model for every global iteration. Input provided to UMAT consists of the stress I"~ and the internal state variable s~ at the beginning of the increment, plus the strain increment AE. The quantities Q~+~ (used in calculating "]',) and AE are calculated in ABAQUS by using the HUGHES & WINGET [1980] algorithm. 3 Output expected from U*IAT consists of the stress T~÷~ and internal state variable sn+~ at the end of the increment, plus the contribution C to the Jacobian matrix used in the overall Newton scheme. The procedure implemented in the user material subroutine to solve (31) and (32) for S~+l and #~+~ is the one outlined in the Appendix. The generality of ABAQUS's other features, combined with the pro- vision for adding a separate "user material" subroutine, makes ABAQUS an extremely useful tool for the development and implementation of new constitutive equations.
All ABAQUS calculations presented here were done with a slightly modified version of its STATIC analysis procedure. The most important modification was to implement an automatic time-stepping procedure to control the accuracy of the constitutive time- integrations. This was done by using as a control measure the maximum equivalent plas- tic tensile strain increment A~max occurring at any integration point in the model dur- ing the increment. Although it is not a direct measure of the constitutive time-integration error, this measure was found to be very effective for controlling the accuracy, Efficient calculations were obtained by keeping A ~ x close to a specified nominal value A ~ . Accordingly, the automatic time-steeping algorithm operated to keep the ratio
close to 1.0 by adjusting the size of the time increments. After an equilibrium solution for a time increment/t t , = tn+~ - t~ was found, the value of R was checked to deter- mine whether this solution would be accepted. If R was greater than 1.25, then the solu- tion was rejected and a new time increment was clone that was smaller by the factor (0.85/R). If R _< 1.25, then the solution was accepted and the value of R was used to determine the first trial size for the next time increment. The following algorithm was used:
If 0.8 < R < 1.25 then At,+~ = Ate~R;
if 0.5 < R < 0.8 then Atn+l = 1.25At.;
if R _< 0.5 then ,atn+~ = 1.50Atn.
Note that the measure A ~ was allowed to exceed the user specified value byup to 25°7o. This was done to avoid having to recalculate increments that came out just sfighfly above the specified nominal value but were otherwise essentially acceptable. In the example problems presented here, a considerable improvement in efficiency was ob- tained by doing this.
3Improved incrementally objective algorithms have been recently proposed by Huo~ms [1984], N^~T~AAL REBEtO [1986], and WESER [1988], but we do not go into that matter here.

Time-integration procedure 533
A second modification to the STATIC procedure in ABAQUS concerned the prelim- inary iteration that was done for each increment. In this preliminary iteration, ABAQUS determines the global stiffness matrix that is used to calculate the kinematical estimate for the first iteration. As part of the procedure, ABAQUS calculates a small trial solu- tion for the kinematical increment in order to establish the loading direction at each inte- gration point. The loading directions are then used for determining the material point Jacobians. For the example calculations presented here, it was not necessary to use these preliminary loading directions. Instead, we determined the required Jacobian by extrap- olating from the previous increment to approximate the parameters in eqn (53). An appreciable reduction in computational expense was achieved by suppressing the kinematic calculation in the preliminary iteration. The extrapolation Jacobian was obtained by approximating the parameter 7/(~-) by
n ( r ) ~- 0 ( t ) / { e ( t ) + 3~At~P(t)}.
If $(t) was small enough for SP(t) to be negligible, then it was assumed that ~(~') --- 1. Equation (41) was used to evaluate c(r) , although the parameters am, a2, bm, and b2 defined in eqns (42) through (45) were evaluated using the derivatives of f and g at the beginning of the increment, instead of at the end. Finally, it was assumed that the di- rection N(r) was the same as N(t).
Specif ic const i tut ive f unc t i ons
The specific constitutive functions f and g used in our example problems are the fol- lowing isothermal version of the functions for high temperature deformations proposed recently by BaowN, K ~ • A~Am~ [1989]:
and
gP =f (O,s ) = A[sinh(~O/s)] m/.,
= g(O,s) = h ( O , s ) f ( O , s ) .
The function h had two possible expressions, depending on whether s is less than or greater than a saturation value s* given by
$* =g[$PlA} n.
When s _< s*,
When s > s*,
h(O,s ) = boil - (s/s*)] ~.
h (O,s ) = -ho[ (S /S*) - 1 la.
In both expressions, the functional dependence of h upon a comes from its appearance in s*. For our example calculations, we have used the data given in Table 1 for Al 1100-O at 400°C taken from Bnow~, ~ a ANAND [1989].

534 A . M . Lush e t a / .
Table 1. Material parameters for AI t i00-O at 673 K (BRowy et al. [1989])
Material Parameter Value
A 4.75 × 10 -~ sec -~ 7.0
m 0.23348 so 29.7 MPa ho 1115.6 MPa a 1.3
18.92 MPa n 0.07049
20.2 GPa 66.0 GPa
Preliminary uniaxial calculations
The performance of the time-integration procedure for the chosen constitutive func- tions was first evaluated using a uniaxial simulation computer program. Automatic time- stepping using the scheme described above was implemented in the uniaxial program. With this program, the efficiency of the iterative schemes given in the Appendix was evaluated, and the effect on the accuracy o f different sized equivalent plastic tensile strain increments was determined.
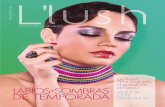
Figure 1 presents the uniaxial stress-strain results obtained for a constant strain rate case (0.01 see -I) with equivalent tensile plastic strain increments of 2°70 and 10°70. For comparison, an extremely accurate reference curve obtained by using an explicit Euler forward time-integration procedure and 40000 time increments is included in the figure. It is seen that the results obtained with 2°70 strain increments are quite accurate, with a maximum error of only 1.2°70 in stress at any fixed amount of strain. The calculation with 10% strain increments was less accurate, as expected, with a maximum error of 4.2%. Note that the "elastic strain" was around 0.03% during the response. Therefore,
e,,,
i
25
20
15
1 0 R e f e r e n c e
o E u l e r b a c k w a r d : 2~; s t r a i n inc .
• E u l e r b a c k w a r d : 10~. s t r a i n inc .
O , , , , , , , , , I , , , , t , , , l l . . , J t J , , , I , , , J , , J t l
0.0 0.1 0.2 0.3 0.4
S t r a i n
Fig. 1. Uniaxial tension results for AL 1100-4) at 673 K with a constant strain rate o f O.01/sec.

Time-integration procedure 535
the plastic strain increments were around 70 times the elastic strain for the 2°70 case, and around 350 times the elastic strain for the 10070 case. The small errors observed in Fig. 1 are due primarily to the approximate integration of ~ given by eqn (21). For example, in the accurate reference calculation the average value of $ during the first 10070 of strain history was 0.649 MPa/sec, whereas for the first increment in the calculation with 10070 strain increments, the calculated value g(e,+~ ,s,+t) was only 0.497 MPa/sec. Conse- quently, the change in s during the first increment of the 10070 case was in error by 23.3070, leading to a 4.2070 error in s,+l which in turn led to a similar error in the stress magnitude e,+l. Based on the results in Fig. 1, a 2070 limit on equivalent plastic tensile strain increments was chosen for all subsequent calculations in this paper to ensure that accurate results were obtained.
As described in the Appendix, a two-level iterative procedure was used to solve eqns (31) and (32) for all calculations in this paper. It worked especially well for the constant strain rate uniaxial calculations. As listed in Table 2, for the 2070 case in Fig. 1, an average of 1.7 Level 1 iterations were required per increment, with a maximum of 3. In addition, an average of 1.1 Level 2 iterations were required for each Level 1 iter- ation, with a maximum of 3. For the 10070 case in Fig. 1, an average of 2.7 Level I iter- ations were required per increment, with a maximum of 4, and an average of 1.3 Level 2 iterations were required for each Level 1 iteration, with a maximum of 2. Note that only 4 Level 1 iterations, each requiring at most 2 Level 2 iterations, were required when a 10% plastic strain increment was taken starting from a stress-free state. Note also that only one iteration was required at both levels for many increments in the 2070 case. This means that the forward gradient starting estimates were accurate enough in these incre- ments. It may be concluded that the iterative scheme performed very efficiently for this problem.
Figure 2 presents the uniaxial stress-strain result obtained for an example problem in which three abrupt strain rate changes occurred. The strain rate was initially 0.001 sec - t , jumping to 0.01 sec -t after 10070 strain had accumulated, and again to 0.1 sec -~ after 20% strain had accumulated. Finally, the strain rate was abruptly decreased to 0.001 sec -~ after 30°70 strain had accumulated. For comparison, an extremely accurate reference curve that was obtained by using an explicit Euler forward time-integration procedure and approximately 40000 time increments is included in Fig. 2. It is seen that the Euler backward result is quite accurate. This problem was a good test of the auto- matic time-stepping algorithm. Each time the strain rate was increased, the first attempt
Table 2. Statistics for the constitutive level iterations at material points for the example calculations
Calculation
Level 1 iterations Level 2 iterations per per
increment Level 1 iteration
Uniaxial (2% inc.) 1.7 ave 1.1 ave 3 max 3 max
Uniaxial (10% inc.) 2.7 ave 1.3 ave 4 max 2 max
Upsett ing 1.1 ave 1.6 ave 3 max 6 max
Plane-strain forging 1.1 ave 1.9 ave 5 max 6 max

536 A.M. LUSH et aL
30 . . . . . . . . . I . . . . . . . . . I . . . . . . . . . I . . . . . . . . . I I I
2 5 ~ = . 0 0 l / s e c I ~ = . 0 1 / s e c I ~ = . l / s e c I ~ = . 0 0 1 / s e c
15
m I0
5 Euler backward: 2% strain inc.
0 " ' • ' ' ' ' . . m . i , . . , I , , i , , , . . , I i ' ' ' J ' ' ' '
0,0 0.! 0.2 0.3 0.4
Strain
Fig. 2. Uniaxial tension results with abrupt strain rate changes for AL 1100-O at 673 K.
at the next increment resulted in a plastic strain increment that was too large, and the increment had to be redone. On the other hand, when the strain rate was decreased by a factor of 100, the automatic time-stepping algorithm could only increase the increment size by 50070 with each successive increment. Consequently, it took 13 increments for the algori thm to adjust the increment size appropriately.
Upset f o rg ing example
As a simple metal-forming example, the proto-typical problem of isothermal upset forging of a cylindrical billet was solved and compared with experimental results. To simplify the calculation while maintaining the important features, the dies were modeled as being rigid, with sticking friction acting to prevent sliding between the billet and die faces when in contact. This friction caused barreling of the billet, with the material near the corners folding over to come in contact with the dies. Consequently, this example problem exhibits the realistic features of inhomogeneous deformat ion, with variable rates of straining at material points and t ime-varying die contact geometry. The billet was 12.7 m m in diameter and 19.05 mm in height. For the calculations presented here, the height o f the billet was reduced by 59°70 in 90.0 sec, corresponding to a nominal strain rate o f 0.01 see - I .
Figure 3 shows the finite element mesh containing 107 four-noded axisymmetric ele- ments 4 (ABAQUS type CAX4). Near the comer where roll-over occurs, the elements are triangular in shape to accommodate this deformat ion mode. Symmetry in the problem allowed a ~ model o f the billet to be used. The die face was modeled as a rigid surface and the external surface of the model was covered with interface elements (ABAQUS type IRS21A) to model the contact conditions.
4These elements in ABAQUS address the problem of mesh-locking in (near) incompressible situations by using the method of NAGI~G.~I., PARKS ~, RICE [1974].

Time-integration procedure 537
A X l S O U T E R S U R F A C E
r l I D O L E P L A N E
Fig. 3. Finite element mesh for axisymmetric upsetting problem.
Figure 4 shows the history of total die force versus die displacement for this calcu- lation. An experimental result is included in the figure for comparison. Apart from the initial load-up region, the agreement is excellent. The discrepancy between the calculated and the experimental force/stroke curves in the initial regions is because the experimen- tal data are the raw data, and it has not been corrected for the load-train compliance. Note that jumps in die force occur in the calculated result whenever new nodes came in contact with the die.
Figure 5 shows the deformed finite element mesh superposed on the undeformed mesh after 59% height reduction. The billet is seen to have expanded radially by a consider- able amount. Five elements have folded over and come in contact with the die.
Figure 6 shows contours of equivalent tensile plastic strain after 59% upsetting. A "dead zone" with less equivalent plastic strain is seen in the upper left portion of the mesh. It results from constrained radial flow due to frictional forces from the die. A zone of more intense plastic flow is seen in the upper right corner of the mesh. This was
6
2
ABAOUS
0 i I i I I I i I ~ I i
0 2 4 6 8 10 12
D i e sRxoke - m m
Fig. 4. Die force versus die stroke for axisymmetric upsetting of an AL 1100 billet at 673 K.

538 A, M. Lush et al.
. . ' o , . . . . .
O I T I I l l l l l l I I I I I I I I 0 1 1
~ - - + - - ~ - - ~ - - ÷ - - + - ' + - - + - - + - - + - - 4 J , * l l l l l * t l , o l l , l o o l ~ l ~ - - + - - ÷ - o ÷ - - + - - + - - + - - + - - + - - ÷ - - 4 t t I D l l l , l * l I * * l * l l t t * l ~ - - + - - ÷ - - ÷ - - ÷ - - + - - ÷ - - + - - + - - + - - 4
I I I l l l t l l
F ° - + - - ÷ - - + - - ~ - - ÷ - - I - - ÷ - - ÷ - - ÷ - ° 4 ~ I ~ I N ~ l i l t l l l l l l l
~ - - + - - ÷ - - + - - ÷ - - + " ÷ - - + - - + - - + - - 4 | l l , | * * l l l , i , i J l * * l , J a
Fig. 5. Results for the upsetting problem after 59% height reduction.
X . D . UCH.UE
1 0 . 0 2 0 . 2 : 3 0 . 4 4 0 . 6 5 0 . 8 8 1L.O 7 1 . 2 8 1 . 4 9 1 . 8
10 I . B 11 2 . 0
Fig. 6. Contours of equivalent tensile plastic strain.
][ • D . URL . I .E
1 3 1 . 2 3 2 . 3 3 3 . 4 3 4 . S 3 5 .
6 3 6 . 7 3 7 . :B 3 8 . 9 3 9 .
1 0 4 9 . 1 1 4 , 1 .
Fig. 7. Contours of deformation resistance s (in MPa).
associated with foldover o f the elements at the corner. Figure 7 shows contours o f the deformation resistance s after 59% upsetting. A region of softer material is seen at the upper left in the figure, corresponding to the dead zone.
This calculation required 167 increments and a total solution time of 4900 seconds on a Data General MVI0000 machine. An average o f 2.1 global iterations per increment was required in this calculation to obtain the converged solution. It was not necessary to repeat any increments due to excessive plastic strain increments or nonconvergence of the global iterations, although 6 global iterations were required for the first time increment in the calculation, during which 13 nodes came in contact with the upper die.

Time-integration procedure 539
The average value of the control measure R for the increments in this calculation was 0.96, indicating that the automatic time-stepping algorithm was controlling the calcu- lation very effectively. Statistics of the constitutive level iterations for this problem are given in Table 2. It may be concluded that the rate-dependent solution procedure de- scribed in this paper worked very well for this problem.
Plane-strain forging example
A miniature, hot, isothermal, closed die forging test was performed on aluminum 1 I00 for the purpose of comparing the predictions of our constitutive equations and computational procedures against experimental results from an actual forging operation. The plane-strain forging process converted the cross section of a cylindrical aluminum billet from a circular to a cruciform shape, as shown in Fig. 8. Proper sizing of the billet ensured that the dies would be filled, and that a small amount of flash would be pro- duced. An oil-based graphite lubricant was applied to the die and billet surfaces to min- imize the effects of friction. The temperature of the billet and dies was maintained at 400°C. Isothermal conditions were approximated by loading at a slow rate of 0.1 mm/sec. This forging example exhibits many important features such as: (a) nonhomo- geneous deformation, (b) variable regions of contact between billet and dies, (c) time- varying deformation rates at material points, and (c) rapid rise of total die force when the dies became filled.
In the finite element analysis it was assumed that there were two planes of symme-
Fig. 8. Schematic of the plane-strain forging process converting a billet from circular to cruciform cross section.

540 A . M . LUSH e t ul.
RFACE
p. W
S'~IMETRY
Fig. 9. Finite element model for plane-strain forging problem.
try in the specimen and dies. Accordingly, only one quadrant of the specimen was modeled, as shown in Fig. 9. A total of 96 ABAQUS type CPESR elements were used for the model. These are eight-noded plane strain elements with "reduced" (2 x 2 Gauss- ian) integration. [These elements in ABAQUS address the problem of mesh-locking in (near) incompressible situations by using reduced integration of the hydrostatic pres- sure.] The die was modeled as a translating rigid surface. Contact conditions between specimen and die were modeled by covering the outer surface of the specimen with plane-strain interface elements (ABAQUS type IRS22), which prevented penetration of the die surface. Preliminary studies showed that the friction coefficient between the billet and dies was close to zero with the lubricant used. Therefore, contact in the finite ele- ment calculations was modeled as frictionless. The specified value for maximum incre- ments in equivalent tensile plastic strain was 2°70. The complete calculation required 19 hours on a Data General MV10000 computer. A total of 485 time increments were taken to simulate the forging process. Figure 10 compares the die load versus stroke result for
Z
I
o
20
t5
10
0 0 6
I I I I J
ABAOUS
I I I I I
1 2 3 4 5
Die s t r o k e - m m
Fig. 10. Die force versus die stroke for plane-strain forging of an A L I 100 billet at 673 K.

Time-integration procedure 541
this calculation with the experimental data. Overall, the agreement between the mea- sured and predicted die load is very good.
Figure 11 shows the finite element mesh after several stages of deformation. Until around 4 mm of stroke, the material flow is seen to be predominantly horizontal. When the die becomes filled in this direction, the flow pattern changes and the load is seen to rise in Fig. 10. Horizontal die filling occurred at a slightly smaller die stroke in the exper- iment than in the finite element calculation, but this can be attributed to slight imper- fections in the die shape and asymmetry in the flow, which were not modeled. Frictional effects associated with breakdown of the lubricant layer as a result of large sliding motions may also have contributed to the discrepancy between the calculated and mea- sured die force versus stroke curves. Contours of equivalent plastic tensile strain after 5.43 mm die stroke are shown in Fig. 12. Contours of internal variable s after 5.43 mm
S T R O K E - 1 . G 0 mm S T R O K E - 2 . 0 0 mm
S T R O K E - 3 . S g mm S T R O K E = 4 . Q B mm
S T R O K E - 5 . R Q mm S T R O K E - 5 . 4 3 mm
Fig. 11. Finite element mesh after several stages of deformation for the plane-strain forging problem.

1 8 . Q 2 Q . 4 3 0 . 8 4 1 . 2 : 5 l . E 6 2 . 8
3 4 2 . 4 S . 4 a .
6 ~=1.
542 A.M. Lush eta/ .
Fig. 12. Contours of equivalent plastic tensile strain after 5.43 mm die stroke in the plane-strain forging problem.
die stroke are shown in Fig. 13. Note that two solid lines are included in Figs. 12 and 13 to indicate the boundaries within the element mesh across which the mesh density was changed.
Referring to Fig. 11 again, the elements in the region where flash is being produced are seen to be severely distorted. Clearly, the calculation would have benefitted from a remeshing operation. In the flash region the plastic flow rate is very high causing the allowable time step to be very small. Consequently, 44°7o of the increments were required to complete the last 1.43 mm of stroke.
This calculation was a good test of the time-integration procedure. Statistics for the constitutive level integrations are given in Table 2. The number of iterations taken at each level are small, and this illustrates the rapid convergence of the two-level iteration scheme in a non-trivial problem.
It is important to note that ABAQUS encountered some difficulties with the global iterations for this problem. A total of 43 increments had to be repeated with smaller
4 S
Fig. 13. Contours of internal variable s after 5.43 mm die stroke in the plane-strain forging problem.

Time-integration procedure 543
time increments due to nonconvergence. In every instance, the nonconvergence occurred just after a node contacted the dies. It is thought that the difficulty was associated with the extremely soft material point Jacobian combined with the abrupt changes in flow direction that occurred after contacts with the dies. To support this assertion, a numer- ical experiment was done in which the material point Jacobians were stiffened artificially in their softest direction (direction Nn+~). This made a considerable improvement in the convergence characteristics of the problem for increments where contacts occurred, but the quadratic convergence properties of the global Newton method were com- promised at other times. Clearly, what is needed is a more intelligent global iteration scheme than the straightforward Newton-Raphson method. Even with the convergence problems which limited the increment size at times, the average value of the control measure R was 0.80 for the increments in this calculation, with only 32o7/o of the incre- ments having R < 0.8. Therefore, the overall efficiency of this calculation is considered reasonably good.
VI. CONCLUDING REMARK
We have formulated, implemented and evaluated the performance of a stable, implicit time-integration procedure 5 for a generic class of isotropic, rate-dependent constitutive equations for elastic-plastic materials. These constitutive equations are a natural, more physical generalization of the classical J2 rate-independent flow theory, and the time- integration procedure is a generalization of the classical radial-return algorithm. These two features of this work make it well suited for wide use in large-scale computations.
Acknowledgements-The substantial technical input from D.M. Parks is gratefully acknowledged. The exper- iments were performed by K.H. Kim and S. Hashimoto; their help is acknowledged. The primary financial support for this work was provided by the U.S. National Science Foundation (Contract No. MEA-8315117), and partial support was provided by the U.S. Army Materials and Technology Laboratory. (Contract No. DAA46-K-0021). All computations were performed on a Data General MVI0000 computer donated to M.I.T. by Data General Corporation.
REFERENCES
1964 WILKINS, M.L., "Calculation of Elastic-Plastic Flow," in ALDER el al. (eds.), Methods in Com- putational Physics, 3, Academic Press, New York.
1966 GIt~N, J.J., "Progress in the Microdynamical Theory of Plasticity," in Proceedings of the Fifth National Congress of Applied Mechanics, ASME, pp. 385-403.
1970 RICE, J.R., "On the Structure of Stress-Strain Relations for Time-Dependent Plastic Deformations in Metals," ASME J. Applied Mech., 37, 728.
1971 RICE, J.R., "Inelastic Constitutive Relations for Solids: An Internal Variable Theory. and Its Appli- cation to Metal Plasticity," J. Mech. Physics of Solids, 19, 433.
1974 N^G'rEo~o.t, J.C., PXRKS, D.M. and RJcE, J.R., "On Numerically Accurate Finite Element Solutions in the Fully Plastic Range," Comp. Methods Applied Mech. Eng., 4, 153.
1974 ZtENKIEWtCZ, O.C. and COP, ME^U, I.C., "Viscoplasticity, Plasticity and Creep in Elastic Solids- A Unified Numerical Solution Approach," Intl. J. Numerical Methods in Eng., 8, 821.
1975 CORUE^U, I., "Numerical Stability in Quasi-Static Elasto-Viscoplasticity," Intl. J. Numerical Meth- ods in Eng., 9, 109.
1975 RICE, J.R., "Continuum mechanics and thermodynamics of plasticity in relation to m/croscale defor- mation mechanisms," in ARC, ON, A,S. (ed.), Constitutive Equations in Plasticity, The M.I.T. Press, Cambridge, MA, pp. 23-79.
SFor plane stress problems, in which the out-of-plane strain components are not defined kinematically, some modifications to the time-integration procedure will be necessary.

544 A .M. LUSH et at.
1976 KRIEG, R.D. and KEY, S.W., "Implementation of a Time-lndepeodent Plasticity Theory into Struc- tural Computer Programs," in STRICKLtN, J.A. and SACZALSKI, K.J. (eds.), Constitutive Equations in Viscoplasticity: Computational and Engineering Aspects, ASME AMD-20, pp. 125-137.
1977 Kxmc, R.D., "Numerical integration of some new unified plasticity-creep formulations," in Proceed- ings of the 4th International Conference on Structural Mechanics in Reactor Technology, paper M6/4.
1977 Kg~G, R.D. and KR~G D.B., "Accuracies of Numerical Solution Methods for Elastic-Perfectly Plastic Model," ASME Journal of Pressure Vessel Technology, 99, 510.
1977 MILLER, A.K. and SHirt, C.F., "An Improved Method for Numerical Integration of Constitutive Equations of the Work Hardening-Recovery Type," ASME Journal of Engineering Materials and Technology, 99, 275.
1977 SHIn, C.F., DELO~r~Zl, H.G., and MILLER, A.K., "A stable computational scheme for stiff time-de- pendent constitutive equations," in Proceedings of the 4th International Conference on Structural Mechanics in Reactor Technology, Paper L2/2.
1978 ARGYRIS, J.H., VAZ, L.E., and W R . ~ , K.J., "Improved Solution Methods for Inelastic Rate Prob- lems," Computer Methods in Applied Mechanics and Engineering, 16, 231.
1978 HtrGm~s, T.J.R. and TAYLOR, R.L., "Unconditionally Stable Algorithms for Quasi-Static Elasto-Visco- Plastic Finite Element Analysis," Computers and Structures, 8, 169.
1978 KAr~CHI, M.B., ZmNKmWICZ, O.C., and OWEN, D.R.J., "The Visco-Plastic Approach to Problems of Plasticity and Creep Involving Geometric Nonlinear Effects," Intl. J. Numerical Methods in Eng., 12, 169.
1978 WiLttma, K.J., "Numerical Solution of Inelastic Rate Problems," Computers and Structures, 8, 511. 1979 Scm~x~R, H.L., Ktn.aK, R.L., and KXAM~R, J.M., "Accurate Numerical Solutions for Elastic-Plastic
Models," ASME Journal of Pressure Vessel Technology, 101, 226. 1980 HUCHES, T.J.R. and WtSGET, J., "Finite Rotation Effects in Numerical Integration of Rate Con-
stitutive Equations Arising in Large-Deformation Analysis," Intl. J. for Numerical Methods in Eng., 15, 1862.
1980 KUMAR, V., MORJARIA, U., and MtJKHERJEE, S., "Numerical Integration of Some Stiff Constitutive Models of Inelastic Deformation," ASME Journal of Engineering Materials and Technology, 102, 92.
1980 OwEs, D.R.J. and HIHTO.~, E., Finite Elements in Plasticity: Theory and Practice, Pineridge Press Ltd., Swansea, UK.
1981 SNYDER, M.D. and BATHE, K.J., "A Solution Procedure for Thermoelastic-Plastic and Creep Prob- lems," Nuclear Engineering and Design, 64, 49.
1982 TELLES, J.C.F. and BPa~ama, C.A., "Elastic/Viscoplastic Problems Using Boundary Elements," Inter- national Journal of Mechanical Sciences, 24, 605.
1982 ZIRtN, R.M. and KREMPL, E., "A Finite Element Time-lntegration Method for the Theory of Vis- coplasticity Based on Infinitesimal Total Strain," ASME Journal of Pressure Vessel Technology, 104, 130.
1983 REED, K.W. and ATLtml, S.N., "Analyses of Large Quasistatic Deformations of Inelastic Bodies by a New Hybrid-Stress Finite Element Algorithm," Computer Methods in Applied Mechanics and Engi- neering, 39, 245.
1983 TAYLOR, L.M. and BECKER, E.B., "Some Computational Aspects of Large Deformation Rate-De- pendent Plasticity Problems," Computer Methods in Applied Mechanics and Engineering, 41, 251.
1984 Cg-ASDRA, A. and Mtmm~1~.mE, S., "A Finite Element Analysis of Metal Forming Problems with an Elastic-Viscoplastic Material Model," Intl. J. for Numerical Methods in Eng., 20, 1613.
1984 Hmmrr, H.D., "ABAQUS/EPGEN, A General Purpose Finite Element Code with Emphasis on Non- linear Applications," Nuclear Engineering and Design, 77, 271.
1984 HUGHES, T.J.R., "Numerical Implementation of Constitutive Models: Rate-Independent Deviatoric Plasticity," in NEMAT-NAsSER, S., ASARO, R.J., and HEGEMmR, G.A. (eds.), Theoretical Foundation for Large-Scale Computations of Nonlinear Material Behavior, Martinus Nijhoff Publishers, Bos- ton, pp. 29-57.
1984 NAGTEGAAL, J.C. and VELDPAtrS, F.E., "On the Implementation of Finite Strain Plasticity Equations in a Numerical Model," in P ~ , J.F.T., ZmNxm,aqcz, O.C., WooD, R.D., and ALEXANDER, J.M. (eds.), Numerical Analysis of Forming Processes, John Wiley & Sons Ltd., New York, pp. 351-371.
1984 PEIRCE, D., SHLH, C.F., and NEEDLe,N, A., " A Tangent Modulus Method for Rate Dependent Solids," Computers and Structures, lg, 875.
1985 A N ~ , L., "Constitutive Equations for Hot-Working of Metals," International Journal of Plasticity, !, 213.
1985 ANAND, L., LUSH, A., BRmEHO, M.F., and PARKS, D.M., "A time-integration procedure for a set of internal variable type elasto-viscoplastic constitutive equations," Report of Research in Mechan- ics of Materials, Department of Mechanical Engineering, M.I.T.
1985 StMo, J.C. and TAYLOR, R.L., "Consistent Tangent Operators for Rate-Independent Elastoplastic- ity," Computer Methods in Applied Mechanics and Engineering, 48, 101.
1986 CO~DTS, D. and KOLLMANN, F.G., "An Implicit Time Integration Scheme for Inelastic Constitutive Equations with Internal State Variables," Intl. J. for Numerical Methods in Eng., 23, 533.
1986 NAGTEGAAL, J.C. and REBELO, N., "On the Development of a General Purpose Finite Element Pro-

Time-integration procedure 545
gram for Analysis of Forming Processes," in MArrL~SSOS, K., SAMUELSSOr~, A., WOOD, R.D., and ZmNgmWlCZ, O.C. (eds.), Proceedings of the 2nd International Conference on Numerical Methods in Industrial Forming Processes, August 1986, 41-49.
1986 LusH, A.M. and ANAND, L., "Implicit time-integration procedures for a set of internal variable con- stitutive equations for hot-working," in MA'r'nmsoN, K., SAMtmLSSON, A., WOOD, R.D., and Zn:~'Km- wtcz, O.C. (eds.), Proceedings of the 2nd International Conference on Numerical Methods in Industrial Forming Processes, August 1986, 131-137.
1987 TA.~X^, T.G. and MILLER, A.K., "Development of a Method for Integrating Time-Dependent Con- stitutive Equations with Large, Small, or Negative Strain Rate Sensitivity," to be published.
1988 WEmm, G., Ph.D. thesis, Massachusetts Institute of Technology. 1989 BROWN, S.B., KIM, K.H., and A~A~rD, L., "An Internal Variable Constitutive Model for Hot Work-
ing of Metals," International Journal of Plasticity, 5, 95.
Department of Mechanical Engineering, Room 1-310 Massachusetts Institute of Technology 77 Massachusetts Avenue Cambridge, MA 02139, USA
(Received 17 September 1987; in final revised form 22 May 1988)
APPENDIX
In Section III the time-integration procedure resulted in the equations
s . + l - s . - z a t g ( O . + l , s . + l ) = O, (A.l)
and
6.+1 - 07~+1 + 3 1 x A t f ( # n + t , s n + l ) = 0 (A.2)
for determining s.+~ and 0.+1, where the subscript n designates that the quantity is eval- uated at time t. and the subscript n + 1 designates that the quantity is evaluated at time t.+~. In general, these equations can only be solved by iterative means. A two-level iteration scheme has been found to work well for all functions f and g that have been tried by the authors. The main iterative loop, denoted Level 1, operates to solve eqn (A. 1) for s.+,, as follows. First, an estimate is made for s.+l. Next, eqn (A.2) is solved to find the value #.+t that is consistent with the estimate s.+t. Solution of eqn (A.2) is done using a bounded Newton-Raphson iteration scheme, which is denoted Level 2. The consistent pair (0.+~ ,S.+l) are substituted in eqn (A.1) to determine whether the error is within the prescribed tolerance. If not, the estimate for s.+l is corrected using a Newton-Raphson scheme and the procedure is repeated.
Initial estimates are needed for 0.+1 and s.+l to start the iterations. A forward gra- dient approximate solution of the two governing equations is used. The functionsfand g are approximated by Taylor's series expansions about the beginning state (O.,s.), i.e.,
af . a f . f .+ , - f . + ~ (a.÷, - ~.) + 7s. (s.+, - s.).
and
ag. 8g. g.+, -- g. + ~ (a.+~ - a . ) + Ts. (s.+, - s.) .

546 A.M. Lusrl et aL
Substitution of these expressions in the governing equations gives
6~+~ ~ 6~ + I b2[~*+, - 6. - 3l~Atf.} - a..Atg., I b.al + azbl
and
with
and
S.+I = S. + I b)[f*+l - - 6 . - - 3lxAtfnl + alAtg~ I bza~ + a2bt
al -- 1 + 3t~At Of. 06. '
a. -- 3t~At Of'---z' " O s , , '
Og. bl = At 36~'
b2 - 1 - A t Og~ OS.
Level 1 iterations
The following steps are done for a generic iteration k, in which a trial value s~+l is being tested for satisfaction of eqn (A.I).
Step I. Determine the value 6~+~ that satisfies eqn (A.2) by performing the Level 2 iterations. The derivative -k k da,+~/ds,+ ~ is also determined, where it is under- stood that #~+l is'viewed implicitly in Level 2 as being a function of s~+~. Determine the error Eft associated with the estimate s~+t: Step 2.
Step 3.
where
E : = s L , - s . - ,a t g L t,
k g(O~+t k ,Sn+l) g n + l -~
Compare E~ with a suitable tolerance TOLs. If
IEkl--< TOLs,
the scheme has converged and s,+l = s~+~ and #,+t = #~+l. A good value for TOLs has been found to be 10 -5 s,. Iteration continues if convergence has not been obtained.

Time-integration procedure 547
Step 4. Calculate the Newton-Raphson correction ASk:
where
A S k = - E ~ d E ~ / d s ~ + l '
des k I c)g~+l Og~+l d#~+l 1 = 1 - ÷ "
Step 5. The estimate for the next iteration is
sk+l snk+z +As k. n + l =
Step 6. The initial estimate to start the next Level 2 iterations is
da~+~ ~.k+l = #~+l + ~ As k. ~ . + l d S k + l
Level 2 iterations
The following steps are done for a generic Level 2 iteration i, where the value s~+~ (for iteration k in Level 1) is specified and the value #ff~.] is being tested for satisfaction of eqn (A.2).
Step 1. Determine the error Eo k'~ associated with -k,i . a n + l •
Eko,i -k,i - 3pAtfff$il, = a.+l - O*+t +
where
Step 2.
fn~i __ f ( #n~',, snk+, ).
Compare Eo k.i with a suitable tolerance TOLo. If
JE~'il < TOLo,
the scheme has converged and #~+l = #.~/l • A good value for TOLo has been found to be 10-5#*+1. If convergence has been obtained, the derivative
d#~+, --3tzAt(af~.',/as~+l) dS~+l 1 + 3#At(Of~.il/O#.~ij)
is calculated for use in Level 1. Iteration continues if convergence has not been obtained.

548 A . M . Lush et al.
Step 3. Calculate the Newton-Raphson correction Ao~,#.k,'-
k i ~ k i dE~' /don; I
where
dEao,i k,i Of n+ 1 k,-------C = 1 + 3t~At *k,----'--C"
dan+ I O~n+t
Step 4. Based upon the sign of the Newton-Raphson correction, update either the upper bound O,ppe, or the lower bound Glower for O~+~, and then calculate the maximum allowable correction, as given by a quasi-bisection scheme. If A o ~ < 0, then
On+ I Gupper ~ ~k , i
and
k, i 1 - k , i A O m a x = 2 (Ol°wer - - On+l).
If Ao~qk > O, then
On+l Glower ~ - k , i
and
k, i - ~ k , i A O m a x ~ Guppe r - - On+ 1.
k , i Step 5. Determine which correction is to be used. If ]Ao~k l > IAam~xl, then
/ i G k , i k , i = A a m a x .
Otherwise,
k, i A{~ k , i ~__ A G N R .
Step 6. The estimate for the next iteration is
• k , i + l ~k i A o k , i. n+l = On~dl +
Each time the Level 2 iterations are performed, it is necessary to initialize the bounds #up~r and #tower- The initial lower bound atower is always zero. The initial upper bound - s;,+~) is determined as follows. Given that Oup~r for iteration k in Level 1 (with estimate k #~+l and f(Ok+l k ,S,+~) are both positive, it follows from eqn (A.2) that
- k "* ( A . 3 ) On+ I ~ Gt t+l ,

Time-integration procedure 549
and
f(#~+t,s~+l) < #'~+.___L (A.4) 3#At"
Equation (A.3) gives an upper bound for #~+~ directly. Assuming that the function f can be inverted, i.e.,
O = f - I ( ~ P , s ) ,
eqn (A.4) gives
[ #,:+1 s ~- °kn+' < f - ' ~3#At' "+']" (A.5)
The smaller of the bounds given by eqns (A.3) and (A.5) is used to initialize #upper. Note that eqns (A.3) and (A.5) correspond to the limiting cases where elastic and plastic strain increments dominate the response, respectively. In many cases the correct solu- tion may be very close to one of these hounds. Therefore, when the Nex~on-Raphson correction is positive a sufficiently large correction is allowed by the bounding scheme to place the next estimate =k.i+l ~,n+l at the upper bound.
If the bounds are not enforced in Level 2, a large number of iterations could be required because eqn (A.2) is very nonlinear for large strain increments and typical func- tions f. When an estimate on'k'i+~ is too large, the Newton-Raphson correction is too small, causing the iterations to converge very slowly from above. On the other hand, when an estimate on+~'k'~ is tOO small the Newton-Raphson correction is generally too large, and the next iteration starts another slow convergence from above. It is these cases with large strain increments for which eqn (A.5) provides an upper bound that is very close to the correct solution, and the problems with slow convergence are eliminated.
If the function fcanno t be inverted, then #,~+~ is the only upper bound that is avail- able, and a different iterative scheme should be used for Level 2. In this case, the expres-
k,i ~k,i sion for the error E~ 'i should be divided by the factor 1 + 3#Atf~n+i/On+l, and the new error tolerance ,,,m-sx'k'i,,n+~ should be used. A different expression also results for dE~.i/
~k,i don+~. This modification increases the Newton-Raphson correction when the estimate -k.i is too large, improving the convergence characteristics considerably. On+ 1
Many alternative procedures for solving the two governing equations were tried before the procedure presented here was chosen. A two-variable Newton-Raphson method was tried first, but the iterations often diverged unless very accurate initial estimates for sn+~ and 5n+t were used. The above forward gradient approximate solution did not provide sufficiently accurate initial estimates in many cases because the functionsfand g were not well represented by the simple Taylor's series expansions. Much better con- vergence was obtained by using the forward gradient solution for sn+, together with a consistent value for ~n+, that was calculated using the Level 2 iterative scheme. This worked well because in general, the convergence problems resulted from poor initial esti- mates for an+j, and the Level 2 iterations provided a much improved initial estimate for ~,,+,. Even with these improved starting values, it was still possible for the two- variable Newton-Raphson iterative procedure to diverge when the forward gradient solution for sn+~ was not very accurate. In contrast, the two-level iterative scheme pre- sented in this appendix has performed well in all cases tested to date.