
Introduction to Roving Vehicles -...
42
Introduction to Roving Vehicles Principles of Space Systems Design U N I V E R S I T Y O F MARYLAND Introduction to Roving Vehicles • Brief overview of lunar surface environment • Examples of rover types and designs • Steering systems • Static and dynamic stability © 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Transcript of Introduction to Roving Vehicles -...
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Introduction to Roving Vehicles
• Brief overview of lunar surface environment• Examples of rover types and designs• Steering systems• Static and dynamic stability
© 2007 David L. Akin - All rights reservedhttp://spacecraft.ssl.umd.edu

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Lunar Highlands (as imagined in 1950’s)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Lunar Highlands (reality)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Lunar Regolith• Broken down from larger pieces over time• Major constituents
– Rock fragments– Mineral fragments– Glassy particles
• Local environment– 10-12 torr– Meteorites at >105 m/sec– Galactic cosmic rays, solar particles– Temperature range +250°F – -250°F

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Regolith Creation Process
• Only “weathering” phenomenon on the moon is micrometeoritic impact!
• Weathering processes– Comminution: breaking rocks and minerals into smaller
particles– Agglutination: welding fragments together with
molten glass formed by impact energy– Solar wind spallation and implantation (miniscule)– Fire fountaining (dormant)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
JSC-1 Simulant
• Ash vented from Merriam Crater in San Francisco volcano field near Flagstaff, AZ
• K-Ar dated at 150,000 years old ± 30,000• Major constituents SiO2, TiO2, Al2O3, Fe2O3,
FeO, MgO, CaO, Na2O, other <1%• Represents low-Ti regolith from lunar mare• MLS-1 simulant (U.Minn.) preferred for
simulation of highland material
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
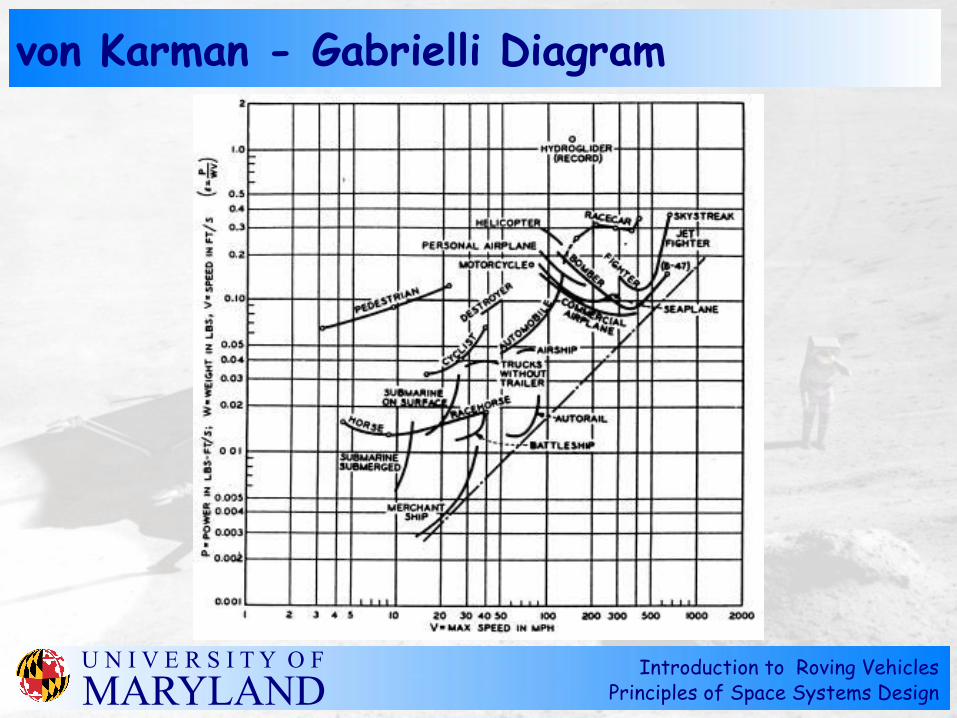
von Karman - Gabrielli Diagram

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Surveyor
• Seven mission May 1966 - January 1968 (5 successful)
• Mass about 625 lbs• Surveyor 6
performed a “hop”– November 1967– 4 m peak altitude,
2.5 m lateral motion

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Lunar Roving Vehicle
• Flown on Apollo 15, 16, 17• Empty weight 460 lbs• Payload 1080 lbs• Maximum range 65 km• Total 1 HP• Max speed 13 kph

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Lunakhod 1 and 2
• Soviet lunar rovers– 2000 lbs– 3 month design lifetime
• Lunakhod 1– November, 1970– 11 km in 11 months
• Lunakhod 2– January, 1973– 37 km in 2 months

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
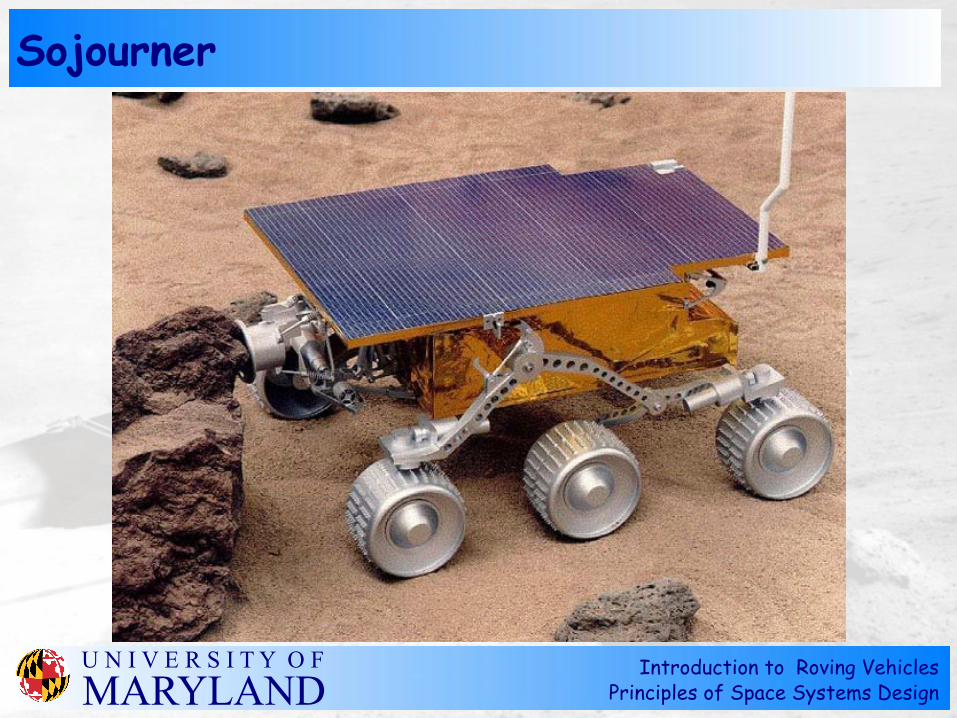
Mars Pathfinder
• Sojourner rover flown as engineering experiment
• 23 lbs, $25M• Design life 1 week• Survived for 83 sols
(outlived lander vehicle)• Total traverse ~100 m

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Mars Exploration Rovers
• Two rovers landed on Mars in January 2004
• Design lifetime 90 days, 1 km
• Both at 1-year mark– Spirit 4030 m– Opportunity 2075 m
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Huygens Probe
• Titan entry January 2005
• Descent imaging used to survey surface at different scales
• Wind motion provided horizontal traverse of surface

TerramechanicsPlanetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Skid-Steer Rover (ET)
14

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Electric Tractor (JSC)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
ET “Suspension”

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
ET in Hilly Terrain
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
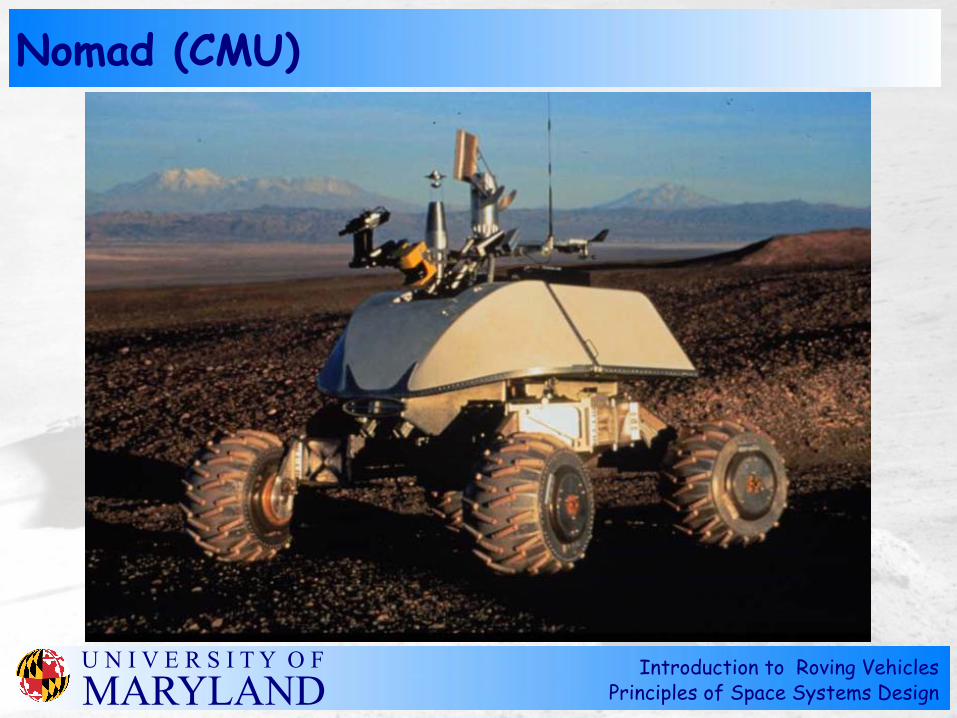
Nomad (CMU)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Nomad in Rough Terrain

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Nomad Transforming Chassis
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
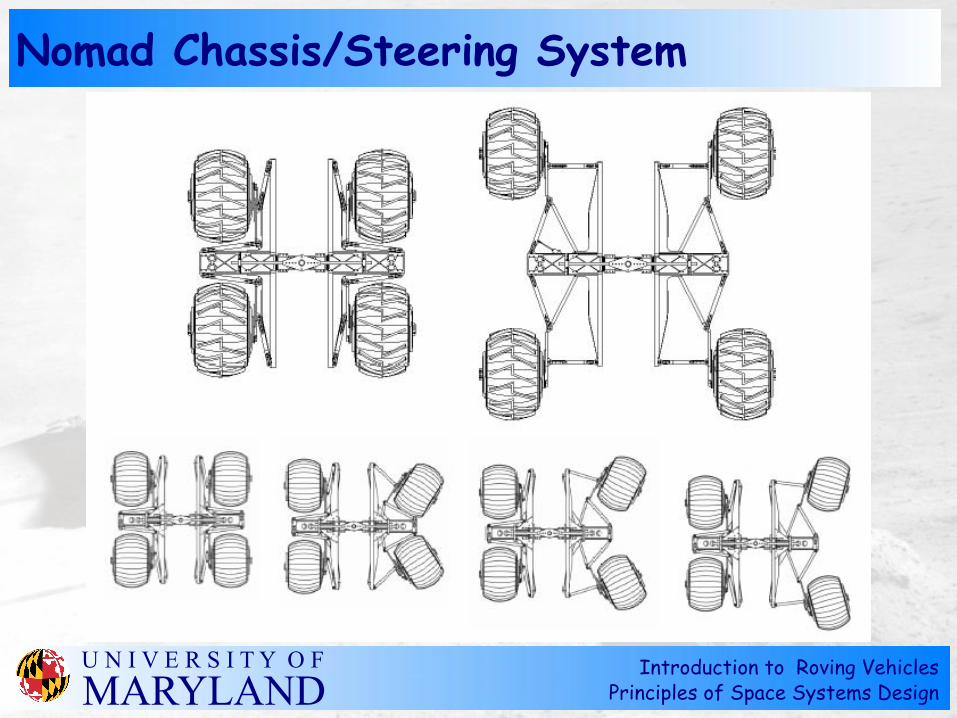
Nomad Chassis/Steering System
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
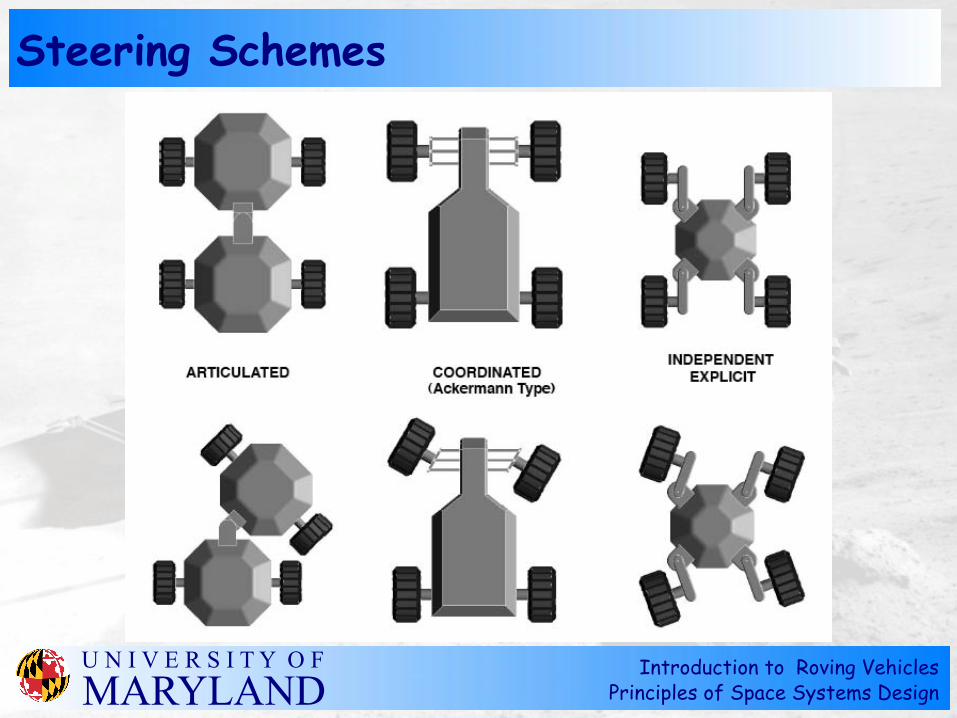
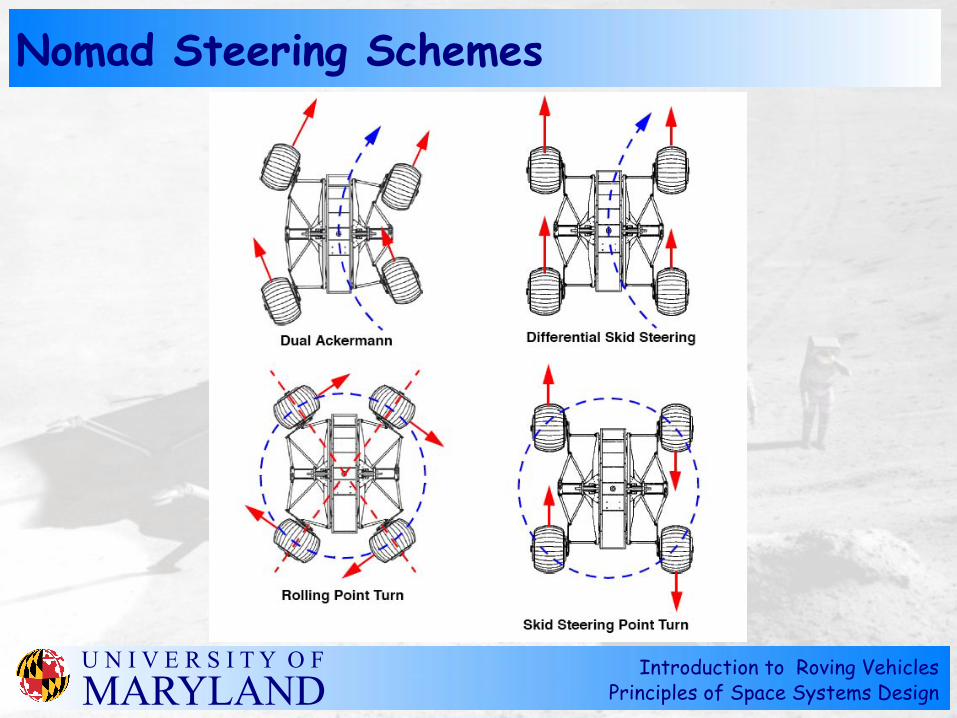
Steering Schemes
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Nomad Steering Schemes

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Marsokhod (in NASA Ames

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Marsokhod Chassis

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Robby (JPL)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
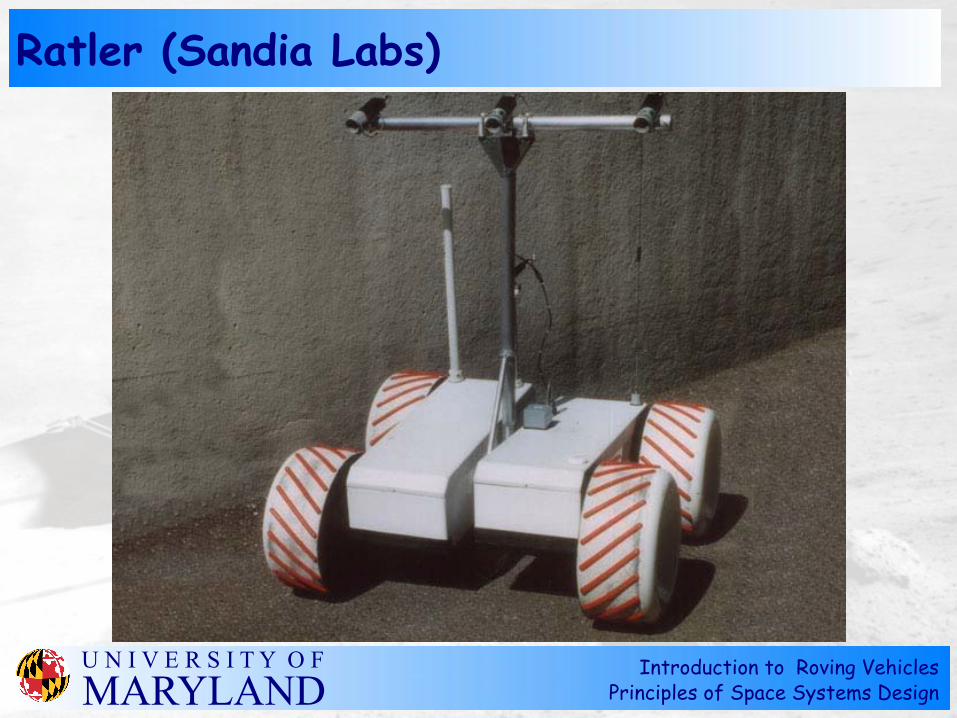
Ratler (Sandia Labs)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
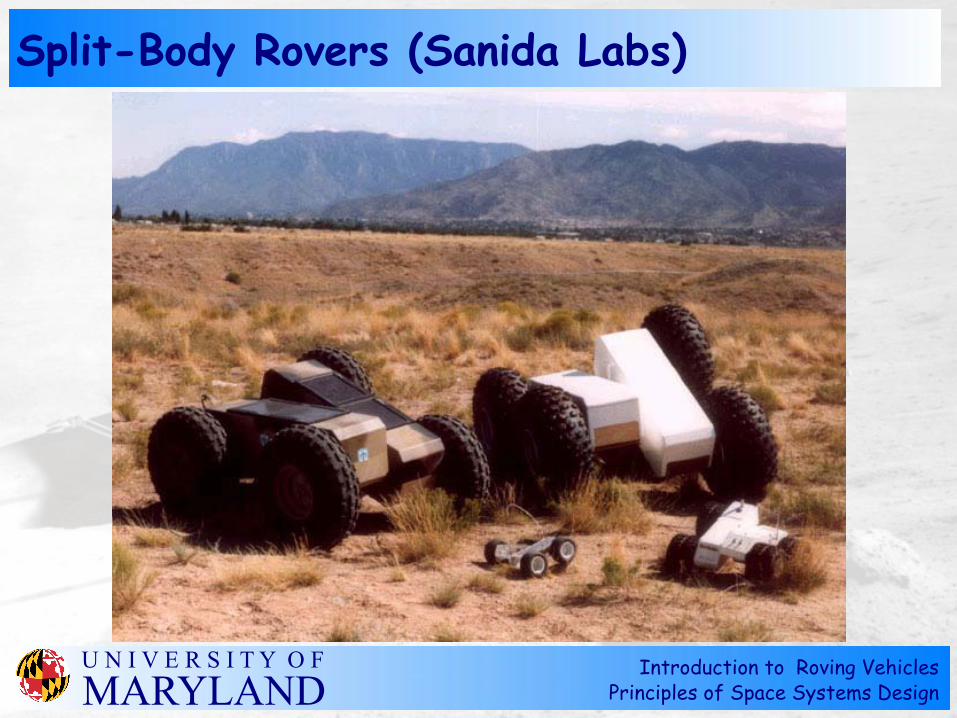
Split-Body Rovers (Sanida Labs)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Rocky

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Rocky 4
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
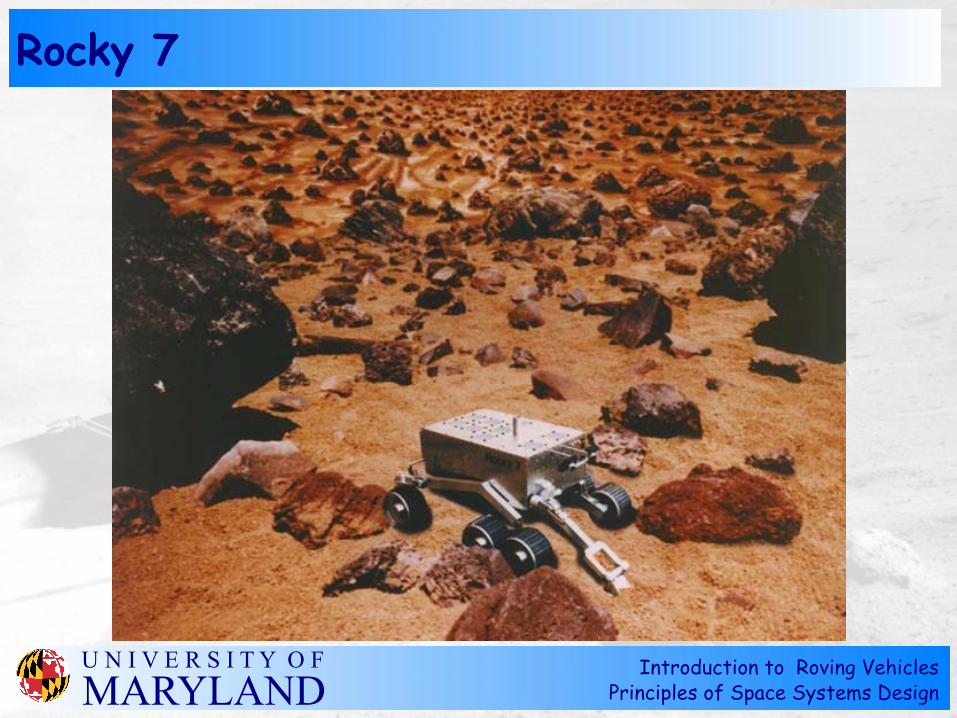
Rocky 7
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Sojourner

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
FIDO (JPL)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Field Trials for New Mobility Technologies

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
SCOUT (JSC)

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Robonaut/Centaur (JSC)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
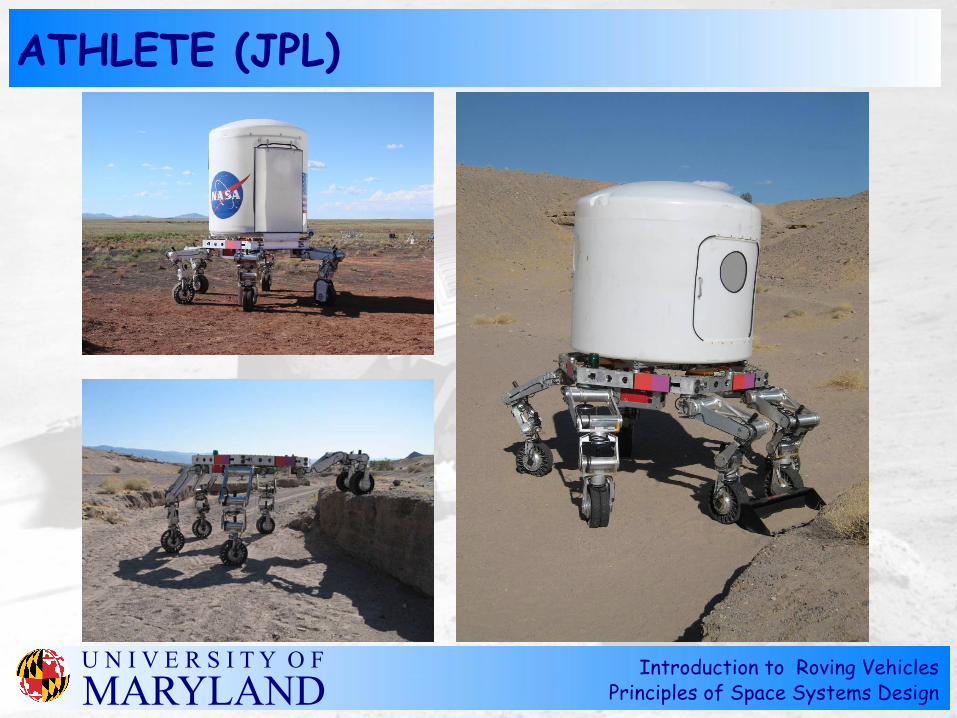
ATHLETE (JPL)
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
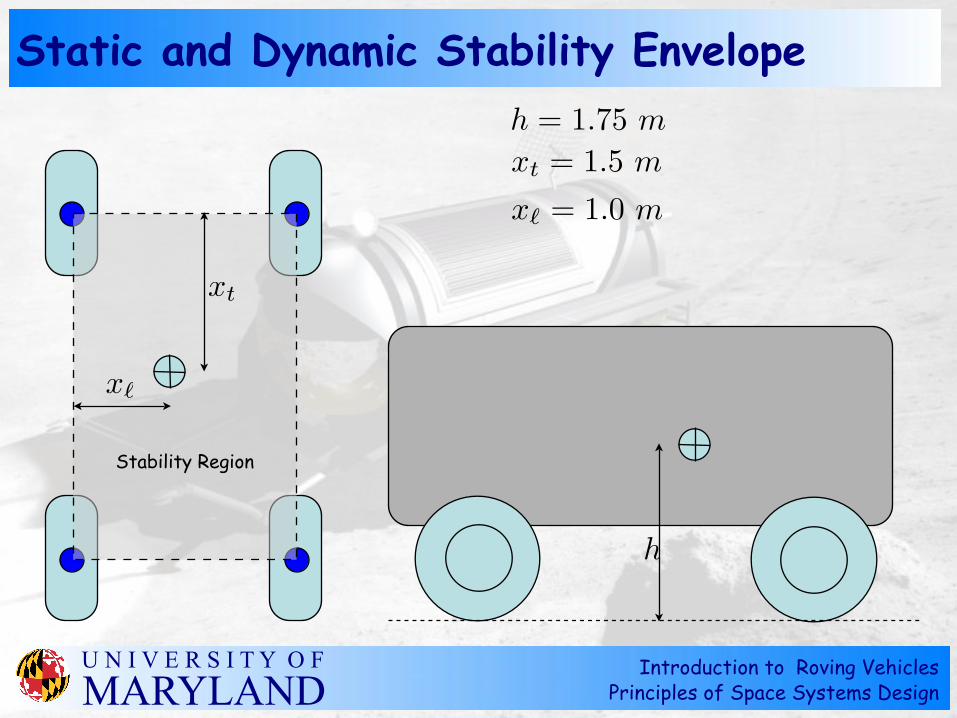
Static and Dynamic Stability Envelope
Stability Region
h
xt
x!
x! = 1.0 m
xt = 1.5 mh = 1.75 m

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Linear Acceleration
“0-60” (sec) Accel (m/sec) Apparent G angle (Earth)
Apparent G angle (Moon)
30 0.89 5.2 29.220 1.34 7.8 40.015 1.79 10.3 48.210 2.68 15.3 59.28 3.35 18.9 64.56 4.47 24.5 70.35 5.36 28.7 73.4

Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
Linear Deceleration
Stopping distance (m)
Deceleration (m/sec^2)
Apparent G angle (Earth)
Apparent G angle (Moon)
20 0.43 2.5 15.215 0.58 3.4 19.912 0.72 4.2 24.310 0.87 5.1 28.58 1.09 6.3 34.16 1.45 8.4 42.14 2.17 12.5 53.62 4.34 23.9 69.8
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
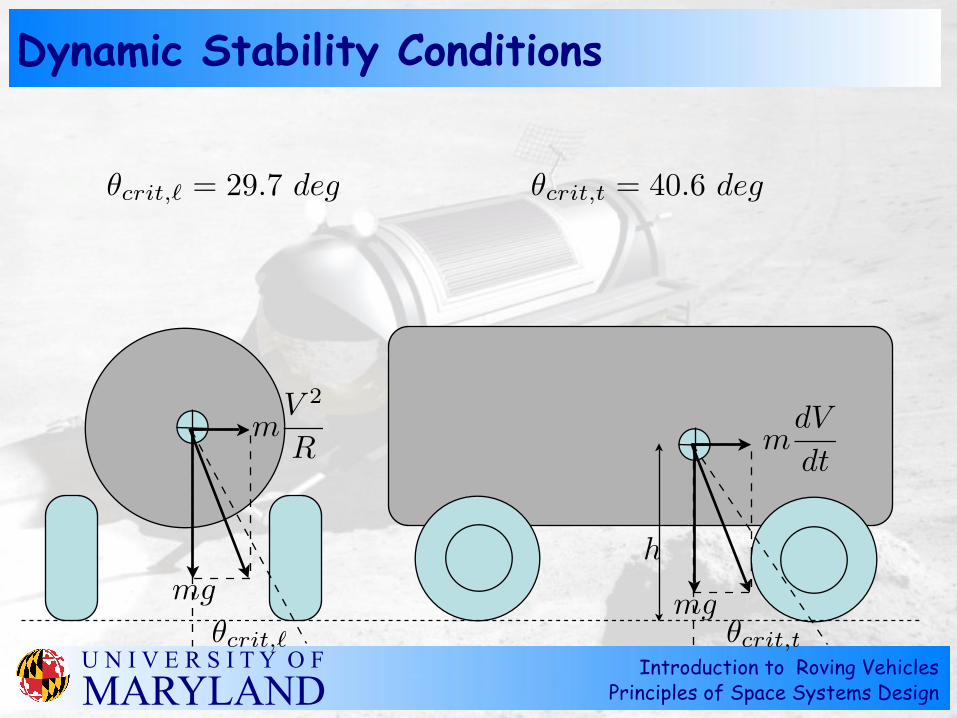
Dynamic Stability Conditions
h
mg
mdV
dt
mg
mV 2
R
!crit,! !crit,t
!crit,! = 29.7 deg !crit,t = 40.6 deg
Introduction to Roving VehiclesPrinciples of Space Systems Design
U N I V E R S I T Y O FMARYLAND
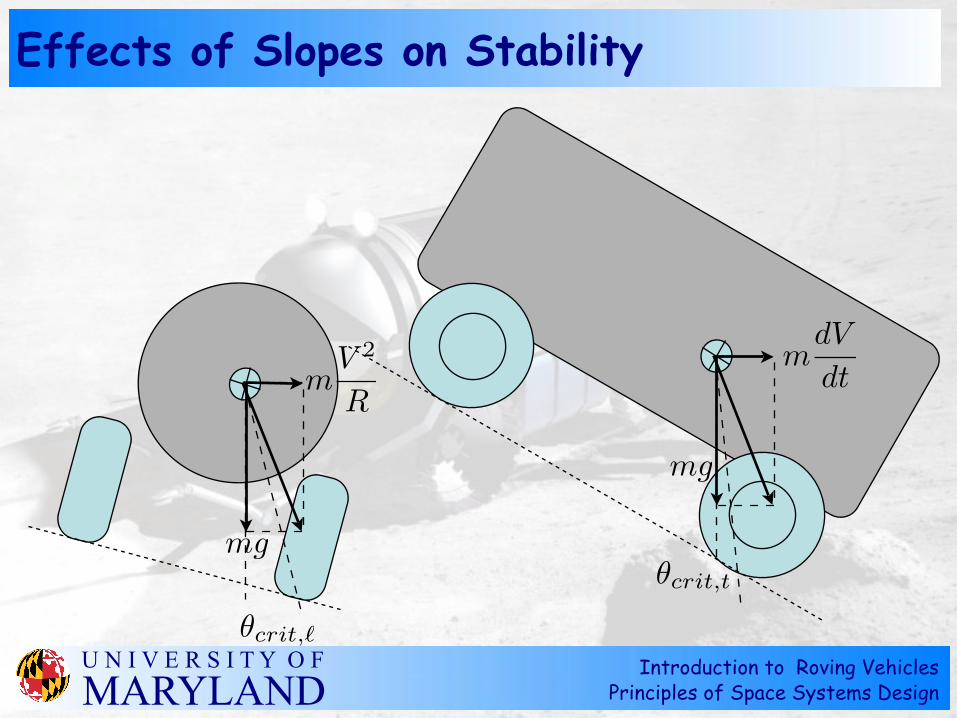
Effects of Slopes on Stability
mg
mdV
dt
!crit,t
mg
mV 2
R
!crit,!



![[3.5 Monster Class] Roving Mauler](https://static.fdocuments.us/doc/165x107/55cf9a9d550346d033a2973a/35-monster-class-roving-mauler.jpg)














