Images and Cartographic Products to Support Lunar Simulations, Training, and Landing Brent A....
11
Images and Cartographic Products to Support Lunar Simulations, Training, and Landing Brent A. Archinal U.S. Geological Survey Flagstaff, AZ Go for Lunar Landing: From Terminal Decent to Touchdown Fiesta Inn Resort, Tempe, AZ 2008 March 4-5
-
date post
19-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of Images and Cartographic Products to Support Lunar Simulations, Training, and Landing Brent A....

Images and Cartographic Products to Support Lunar Simulations, Training, and
Landing
Images and Cartographic Products to Support Lunar Simulations, Training, and
Landing Brent A. ArchinalU.S. Geological Survey
Flagstaff, AZ
Go for Lunar Landing: From Terminal Decent to Touchdown
Fiesta Inn Resort, Tempe, AZ2008 March 4-5
Brent A. ArchinalU.S. Geological Survey
Flagstaff, AZ
Go for Lunar Landing: From Terminal Decent to Touchdown
Fiesta Inn Resort, Tempe, AZ2008 March 4-5

OverviewOverview
Using imagery and altimetry to create mosaics and topographic models (DEMs or DTMs), for planning, simulation, training, navigation, and operations
Existing and planned data sources <- Just covered by M. Robinson
Most important data sources Mapping product formats – then and now USGS landing site mapping examples Apollo 15 site mapping examples Possible products for Constellation use
Using imagery and altimetry to create mosaics and topographic models (DEMs or DTMs), for planning, simulation, training, navigation, and operations
Existing and planned data sources <- Just covered by M. Robinson
Most important data sources Mapping product formats – then and now USGS landing site mapping examples Apollo 15 site mapping examples Possible products for Constellation use
Data Sources – Planned (most important) imagery, altimetryData Sources – Planned (most important) imagery, altimetry
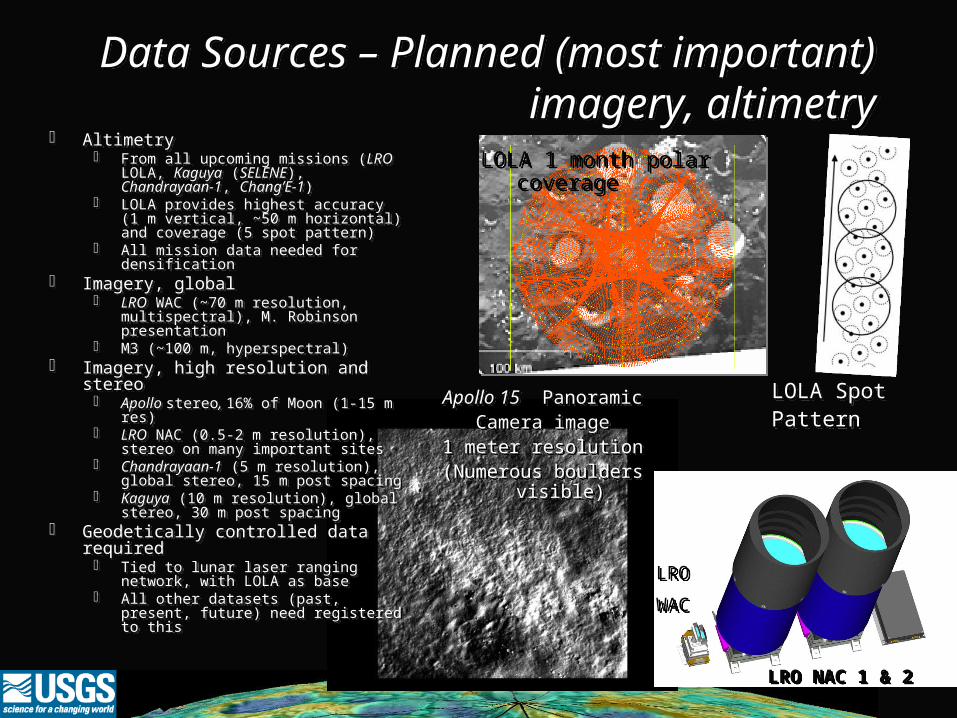
Altimetry From all upcoming missions (LRO
LOLA, Kaguya (SELENE), Chandrayaan-1, Chang’E-1)
LOLA provides highest accuracy (1 m vertical, ~50 m horizontal) and coverage (5 spot pattern)
All mission data needed for densification
Imagery, global LRO WAC (~70 m resolution,
multispectral), M. Robinson presentation
M3 (~100 m, hyperspectral) Imagery, high resolution and
stereo Apollo stereo, 16% of Moon (1-15
m res) LRO NAC (0.5-2 m resolution),
stereo on many important sites Chandrayaan-1 (5 m resolution),
global stereo, 15 m post spacing Kaguya (10 m resolution), global
stereo, 30 m post spacing Geodetically controlled data
required Tied to lunar laser ranging
network, with LOLA as base All other datasets (past, present,
future) need registered to this
Altimetry From all upcoming missions (LRO
LOLA, Kaguya (SELENE), Chandrayaan-1, Chang’E-1)
LOLA provides highest accuracy (1 m vertical, ~50 m horizontal) and coverage (5 spot pattern)
All mission data needed for densification
Imagery, global LRO WAC (~70 m resolution,
multispectral), M. Robinson presentation
M3 (~100 m, hyperspectral) Imagery, high resolution and
stereo Apollo stereo, 16% of Moon (1-15
m res) LRO NAC (0.5-2 m resolution),
stereo on many important sites Chandrayaan-1 (5 m resolution),
global stereo, 15 m post spacing Kaguya (10 m resolution), global
stereo, 30 m post spacing Geodetically controlled data
required Tied to lunar laser ranging
network, with LOLA as base All other datasets (past, present,
future) need registered to this
LOLA 1 month polar coverage
LOLA 1 month polar coverage
LOLA SpotPatternLOLA SpotPattern
LRO NAC 1 & 2LRO NAC 1 & 2
LRO
WAC
LRO
WAC
Apollo 15 PanoramicCamera image
1 meter resolution(Numerous boulders
visible)
Apollo 15 PanoramicCamera image
1 meter resolution(Numerous boulders
visible)

Mapping Products – ThenMapping Products – Then Paper LO and Apollo “image maps” and topographic (contour) maps.
By USGS and DMA See e.g. LPI site:
http://www.lpi.usra.edu/resources/
Still best data in many areas
Paper LO and Apollo “image maps” and topographic (contour) maps.
By USGS and DMA See e.g. LPI site:
http://www.lpi.usra.edu/resources/
Still best data in many areas
USGS LO map, used for A17 LRV fender repair
USGS LO map, used for A17 LRV fender repair
LO map of Apollo 15 site, with annotation
LO map of Apollo 15 site, with annotation

Mapping Products, Now – for simulations, training, and landing
Mapping Products, Now – for simulations, training, and landing
Digital products – DEMs (or DTMs)
Lend themselves to creating simulations for planning and training
Also for display and terrain matching navigation during landing and surface operations
Illumination possible from any direction
Global and Landing site mapping
GIS systems used for data comparison
Digital products – DEMs (or DTMs)
Lend themselves to creating simulations for planning and training
Also for display and terrain matching navigation during landing and surface operations
Illumination possible from any direction
Global and Landing site mapping
GIS systems used for data comparison
Examples from USGS “PIGWAD” Planetary Mapping site (http://webgis.wr.usgs.gov/)
Examples from USGS “PIGWAD” Planetary Mapping site (http://webgis.wr.usgs.gov/)

Current Landing Site MappingExamples - USGS
Current Landing Site MappingExamples - USGS
Using commercial photogrammetric workstation and software and USGS ISIS planetary mapping software
Recent experience from many missions, including:
Mars Landing site mapping from MGS MOC 1.5 to 6 m resolution), MRO HiRISE (30 cm resolution) (A. McEwen, PI), soon CTX (8 m resolution).
Titan surface mapping from Huygens DISR imaging
Lunar landing site mapping from Lunar Orbiter, Apollo Metric, and Apollo Panoramic cameras (10 m post spacing, ~3 m possible) (next slides)
Via stereo (see M. Broxton presentation) with photoclinometry (shape from shading) for single pixel DEMs – similar to A. McEwen “photometric stereo”
Manual editing and QC absolutely essential for mission success compared to fully automatic techniques
Using commercial photogrammetric workstation and software and USGS ISIS planetary mapping software
Recent experience from many missions, including:
Mars Landing site mapping from MGS MOC 1.5 to 6 m resolution), MRO HiRISE (30 cm resolution) (A. McEwen, PI), soon CTX (8 m resolution).
Titan surface mapping from Huygens DISR imaging
Lunar landing site mapping from Lunar Orbiter, Apollo Metric, and Apollo Panoramic cameras (10 m post spacing, ~3 m possible) (next slides)
Via stereo (see M. Broxton presentation) with photoclinometry (shape from shading) for single pixel DEMs – similar to A. McEwen “photometric stereo”
Manual editing and QC absolutely essential for mission success compared to fully automatic techniques
USGS Digital Photogrammetric Workstation
running Leica SOCET SET
USGS Digital Photogrammetric Workstation
running Leica SOCET SET
Model of ~1 km Victoria Crater on Mars
Model of ~1 km Victoria Crater on Mars
Opportunity RoverOpportunity Rover
From ~30 cm resolution
HiRISE stereo images
From ~30 cm resolution
HiRISE stereo images
Model of ~3 km area of surface of
Titan
Model of ~3 km area of surface of
Titan

Apollo 15 Site Mapping - ExampleApollo 15 Site Mapping - Example
Lunar OrbiterApollo Metric CameraApollo Panoramic
camera
Lunar OrbiterApollo Metric CameraApollo Panoramic
camera
USGS mapped Apollo 15 landing site with scanned Apollo Pan, LO IV global HR, LO V site MR images
From 2 to 30 m/pixel
Good sub pixel matching except in shadows, bland areas at highest resolution
No “cliffs” in LO models but other distortions found
10s % of Moon could be mapped now with 10 to 150 m post spacing
USGS mapped Apollo 15 landing site with scanned Apollo Pan, LO IV global HR, LO V site MR images
From 2 to 30 m/pixel
Good sub pixel matching except in shadows, bland areas at highest resolution
No “cliffs” in LO models but other distortions found
10s % of Moon could be mapped now with 10 to 150 m post spacing

Apollo 15 Site – Simulation ExampleApollo 15 Site – Simulation Example
Ground truth
Mosaic of Apollo 15 photos by David Scott from surface
Ground truth
Mosaic of Apollo 15 photos by David Scott from surface
Simulation from
Apollo 15 stereo Pan images
10 m post spacing, 2 m resolution
Simulation from
Apollo 15 stereo Pan images
10 m post spacing, 2 m resolution

Possible Products For Constellation Use
Possible Products For Constellation Use
Use merged altimeter datasets for global DEM Global reference frame Dense coverage High resolution polar
coverage Use global stereo for
densifying global DEM Apollo Chandrayaan-1 or Kaguya
Landing site mapping LROC NAC when available Apollo Panoramic Chandrayaan-1
Use merged altimeter datasets for global DEM Global reference frame Dense coverage High resolution polar
coverage Use global stereo for
densifying global DEM Apollo Chandrayaan-1 or Kaguya
Landing site mapping LROC NAC when available Apollo Panoramic Chandrayaan-1
Polar mapping / DEMs Mini-RF (LRO, Chandrayaan-
1) for shadowed areas Product formats:
Controlled global mosaics and DEMs for planning, simulation, terrain following navigation
Controlled site mosaics and DEMs for landing and surface planning, simulation, and navigation
Digital products and some hardcopy products
Polar mapping / DEMs Mini-RF (LRO, Chandrayaan-
1) for shadowed areas Product formats:
Controlled global mosaics and DEMs for planning, simulation, terrain following navigation
Controlled site mosaics and DEMs for landing and surface planning, simulation, and navigation
Digital products and some hardcopy products
Key is post mission processing and geodetic control (registration) of data
Via Lunar Mapping and Modeling Project? – See Ray French presentation
What products are really needed for Constellation? Processing beyond that likely needed as well, for resource
location and science
Key is post mission processing and geodetic control (registration) of data
Via Lunar Mapping and Modeling Project? – See Ray French presentation
What products are really needed for Constellation? Processing beyond that likely needed as well, for resource
location and science

BackupBackup

Data Sources – Existing (important) imagery, altimetry
Data Sources – Existing (important) imagery, altimetry
Lunar Orbiter Still best coverage for much of Moon Global digital mosaic finally completed
last month! Some areas, 1 m resolution and stereo
Apollo (see M. Robinson presentation)
A15-A17, covers ~16% of Moon Metric camera gives 4 fold stereo, at
7-15 m resolution, 160 x 160 km Panoramic camera gives stereo at 1-4
m resolution, 339 x 26 km Will likely _not_ be superseded for
some time Clementine
Near global coverage at ~150-200 m resolution
Multispectral, but high sun angle, some stereo info
Only existing altimetry but sparse (~70,000 points)
Basis for current Unified Lunar Control Network 2005 (~44,000 images, ~273,000 points & topography)
Lunar Orbiter Still best coverage for much of Moon Global digital mosaic finally completed
last month! Some areas, 1 m resolution and stereo
Apollo (see M. Robinson presentation)
A15-A17, covers ~16% of Moon Metric camera gives 4 fold stereo, at
7-15 m resolution, 160 x 160 km Panoramic camera gives stereo at 1-4
m resolution, 339 x 26 km Will likely _not_ be superseded for
some time Clementine
Near global coverage at ~150-200 m resolution
Multispectral, but high sun angle, some stereo info
Only existing altimetry but sparse (~70,000 points)
Basis for current Unified Lunar Control Network 2005 (~44,000 images, ~273,000 points & topography)
Apollo 15 Panoramic image (A15 landing site)
Apollo 15 Panoramic image (A15 landing site)
Clementine Global Basemap Mosaic
Clementine Global Basemap Mosaic
Lunar
Orbiter
near side
view
Lunar
Orbiter
near side
view