
IGNSS 2011 Conference Handbook
20
www.ignss.org Incorporating the International Incorporating the International Symposium on GPS/GNSS Symposium on GPS/GNSS ABN 50 493 173 615 15 – 17 November 2011 University of New South Wales Sydney NSW Australia Symposium Handbook IGNSS IGNSS 2011 2011
-
Upload
rob-henshaw -
Category
Documents
-
view
221 -
download
1
description
IGNSS 2011 Conference Handbook
Transcript of IGNSS 2011 Conference Handbook

www.ignss.org
Incorporating the InternationalIncorporating the InternationalSymposium on GPS/GNSSSymposium on GPS/GNSS
ABN 50 493 173 615
15 – 17 November 2011University of New South Wales
Sydney NSW Australia
Symposium Handbook
IGNSSIGNSS20112011

IGNSSIGNSS20112011 15-17 November 2011
WELCOME FROM THE PRESIDENT
It is with great pleasure that I welcome you to the IGNSS2011 symposium and exhibition, held from
15 - 17 November at the University of New South Wales, Sydney, Australia. GNSS is entering an exciting expansion period with new signals in space, new constellations and new augmentation systems, all happening over the next few years.
In additional to four global systems, there are also plans for regional systems from India and Japan that will enable even more possibilities in the Asia Pacific Region. Therefore, it is also timely that this year the IGNSS conference, with its Australasian roots, is also being combined with a similar conference that is run by like-minded GNSS professionals from northern and eastern Asia.
The combined symposium will provide a strong scientific program, enjoyable social functions and importantly an opportunity to meet with international colleagues to exchange and compare professional practices.
IGNSS 2011 will feature keynote speakers, oral presentations, panel sessions, interactive poster sessions, an informative trade exhibition and interactive field day.
GNSS specialists from the USA, Europe, Asia and Australasia will provide updates on established and emerging technologies.
On behalf of the International Global Navigation Satellite Systems (IGNSS) Society and the organising committee, I look forward to welcoming you to IGNSS 2011.
Matt HigginsPresidentIGNSS Society Inc
WELCOME FROM THE CHAIRMAN, IPC OF INTERNATIONAL SYMPOSIUM ON GPS/GNSS
On behalf of the International Program Committee of International Symposium on GPS/GNSS, I cordially
welcome all the attendees to 2011 International Symposium on GPS/GNSS (ISGNSS). 2011 ISGNSS will be held along with IGNSS conference.
IPC members strongly believe that ISGNSS has provided an opportunity for GNSS community to exchange ideas and experiences since 1999. During past decade, GNSS community has seen lots of changes; new technology, convergence with communications, especially multiple constellations. In the expected multiple GNSS constellations, the interoperability or the interchangeability must be the most important thing to consider. The interoperability among various GNSS communities becomes certainly more and more important. The technical program and the social functions provided in ISGNSS combined with IGNSS surely will contribute to enhance the interoperability among GNSS communities.
It is third time for ISGNSS to be held at Sydney. All IPC members want to express their sincere appreciation to the effort and time of Australian colleagues for preparing 2011 ISGNSS combined with IGNSS2011. Welcome all of you and hope to enjoy the program and the atmosphere of the conference.
Sang Jeong Lee ChairmanIPC of International Symposium on GPS/GNSS
2

IGNSS TECHNICAL ADVISORY COMMITTEE
Matt Higgins
Matt Higgins is Manager of Geodesy and Positioning in the Queensland Department of Environment and Resource Management. He is a Co-Chair of Working Group D of the United Nations mandated International Committee on GNSS. He was also a Vice
President of the International Federation of Surveyors (FIG) from 2007 to 2010. Matt was elected President of the Australian based International GNSS Society in 2008, when GPS World magazine also named him among the 50+ global leaders to watch in GNSS business.
Chris Rizos
Chris Rizos is a graduate of The University of New South Wales (UNSW), Sydney, Australia; obtaining a Doctor of Philosophy in Satellite Geodesy in 1980. Chris is currently the Head of the School of Surveying & Spatial Information Systems at UNSW. Chris has
been researching the technology and applications of GPS since 1985, and is currently the President of the International Association of Geodesy (IAG), a member of the Governing Board of the International GNSS Service, and a member of the IAG’s Global Geodetic Observing System Steering Committee. Chris is a Fellow of the IAG and of the Australian Institute of Navigation.
Professor Andrew Dempster
Professor Andrew Dempster is Director of the Australian Centre for Space Engineering Research (ACSER) at the University of New South Wales (UNSW). He is also Director of Research in the School of Surveying and Spatial Information Systems and Director of
Postgraduate Research in the Faculty of Engineering. He was system engineer and project manager for the first GPS receiver developed in Australia in the late 80s and has been involved in satellite navigation ever since. His current research interests are in satellite navigation receiver design and signal processing, areas where he has six patents, and new location technologies. He is leading the development of space engineering research at ACSER.
Rob Lorimer
Rob Lorimer is Business Director for the CSIRO’s Wealth from Oceans National Research Flagship and sits on the Australian Governments Space Industry Innovation Council (Space Council). His career history includes CEO of Beeline Technology (now
part of Hemisphere GPS), Managing Director of Trimble Asia Pacific and contributing editor to GPS World.
3
Martin Nix
Martin Nix has a Masters of Surveying (GIS), UNSW and is the CEO of Position Partners. After practising as a registered surveyor, he had management positions with Leica in Switzerland, USA and Australia over 25 years. He holds board
positions including the School of Surveying UNSW and working group roles for ANZLIC’s NPI Policy and ASC’s GNSS Strategy.
IGNSS CONTACT INFORMATIONShannon LockyerIGNSS Society Inc.PO Box 6026MITCHELTON QLD 4053 AUSTRALIAPhone: +61 7 3355 6630 Fax: +61 7 3855 8756 Email: [email protected]
Krys HenshawIGNSS Society Inc.PO Box 413TWEED HEADS NSW 2485 AUSTRALIAPhone: +61 7 5599 5007 Fax: +61 7 55 366 366Email: [email protected]
IGNSS SYMPOSIUM PARTNER & SPONSOR
SPONSORS
IGNSS MEDIA PARTNERS

KEYNOTE SPEAKERS
In order as they appear in the Program
Sharafat Gadimova – Programme Officer, United Nations Office At Vienna
Sharafat Gadimova received a diploma in information technology from the Azerbaijan State Oil Academy and a Master’s Degree of Engineering in remote sensing and GIS from the Asian Institute of Technology.
Previously, she worked for the Azerbaijan National Aerospace Agency and the Institute of Oceanology, Russian Federation as a researcher.
Since 2004, she has been with the United Nations. She is involved in the organization of the UN activities related to GNSS, particularly the development of the International Committee on Global Navigation Satellite Systems (ICG) and the activities of the UN-affiliated Regional Centres for Space Science and Technology Education.
Edgar Thielmann – Head of Galileo Department – EU satellite Navigation Programmes: Applications, Security and International Aspects
Mr Edgar Thielmann is in charge since 1 April 2008 of the Galileo department dealing
with EU satellite navigation programmes: Applications, Security and International Aspects.
As of 2001 he was responsible for the Trans-European Networks policy. Previously he worked at the European Commission in various policy domains, including External Relations and Humanitarian Affairs.
Prior to joining the Commission he was in charge of research policy issues in the Federal Ministry of Research in Germany. During several years he lectured at the university of Kassel and worked as a research associate. Edgar is a qualified solicitor.
Dr Rosalind Dubs, Chair, Space Industry Innovation Council
Formerly Deputy Vice-Chancellor (External Relations), University of Technology Sydney, Dr Ros Dubs has wide-ranging commercial and international experience in both private and public sectors.
As part of global electronics company Thales SA, she was the Paris-based Operations VP of its world-leading air traffic management business, Managing Director of its navaids business line in Stuttgart, Germany, and Director of Electronic Systems with ADI Limited.
Dr Dubs’ earlier career included senior positions in CSIRO, the Australian National University, and Airservices Australia. She is also a non-executive director of Aristocrat Leisure Limited.
Michele Clement – Manager Space Policy Unit
Michele Clement is the Manager of the Space Policy Unit in the Department of Innovation, Industry, Science and Research. The Space Policy Unit co-ordinates Australia’s national and international space
activities, delivers the Australian Space Research program and is developing a national space policy for Australia
Michele has worked for the Department of Innovation, Industry, Science and Research since 2003 undertaking both program delivery and policy roles. Prior to joining the Space Policy Unit, in July 2009, Michele managed the Department’s budget process involving the securing of federal funding for a number of new programs and initiatives.
Michele has a background in banking and finance, particularly investment in small technology and bio-technology businesses. Michele holds a Masters in Business Administration.
Brett Biddington – Chair of the Space Industry Association of Australia
Brett Biddington is Chair of the Space Industry Association of Australia and a member of the Australian Government’s Space Industry Innovation Council.
He serves on numerous other boards and executives with interests in space science and has been closely involved with the governance of Australian astronomy for the past six years.
He has written two reports (2008, 2010) about Australia’s space future which have been published by the Kokoda Foundation (www.kokodafoundation.org) which is a Canberra-based ‘think tank’. He owns a small consulting company - Biddington Research Pty Ltd – which specialises in space and cyber security matters.
Between 2002 and 2009 Brett was a member of Cisco Systems’ global space team which is devising and implementing standards based merged space/ground networks as a vector to the creation of new markets.
Before joining Cisco Brett served in the Royal Australian Air Force (RAAF) for nearly 23 years. He was an intelligence and security specialist and also worked in capabiity development where he sponsored numerous classified and unclassified space, intelligence, and command and control projects.
4
IGNSSIGNSS20112011 15-17 November 2011

Maureen Walker, PNT Representative, US State Department, Washington DC USA
Ms. Maureen Walker serves as the Senior State Department Representative at the National Coordination Office for Space-Based Positioning, Navigation, and Timing (PNT). Ms. Walker provides the
global perspective in interagency consultations on a comprehensive strategy to incorporate military and civilian requirements into the improvement of the U.S. GPS constellation. She also works with the U.S. private sector to identify key concerns and incorporate their views into ongoing U.S. Government processes. She led the successful negotiations within the Asia Pacific Economic Cooperation forum on the Strategy to include GNSS Technologies in the development of Seamless Transportation Systems. She is a distinguished graduate of the National Defense University, has a law degree and is a member of the District of Columbia Bar Association.
Sergey Karutin
Sergey Karutin is the deputy head of the division in Russian Space Systems and is an Assistant Professor in Bauman Moscow State Technical University. Sergey has been working in the GLONASS team since 1998
and developing GNSS augmentations – Russian SBAS System for Differential Corrections and Monitoring and ground DGNSS networks. He received a Ph.D in 2004. He has about 35 papers in the GNSS field.
Satoshi Kogure
Satoshi Kogure is an associate senior engineer of Japan Aerospace Exploration Agency (JAXA). He received an MS in aeronautical engineering from Nagoya University in 1993 and an MS in aerospace engineering from University of Colorado
at Boulder in 2001. He started his career at satellite operation division in National Space Development Agency (NASDA), former JAXA in 1993. He has been working for satellite positioning system as a satellite systems engineer since 2001. He is a member of Japan Society for Aeronautical and Space Science as well as U.S. Institute of Navigation.
Professor Richard Holdaway – School of Biological Sciences, University of Canterbury, Christchurch, New Zealand, and Palaecol Research Ltd, Christchurch, New Zealand
Sponsored by Australian Centre for
Space Engineering Research (ACSER)
Richard Holdaway has a private research company specialising in ecosystem change and is a Fixed Term Professor in the School of Biological Sciences at the University of Canterbury (Christchurch, New Zealand). For the past five years, Richard has researched the navigational and orientational capacities of long-distance migratory animals, especially of sooty and wedge-tailed shearwaters. He has a very active collaboration with Travis Horton on migration of other species, including humpback whales, great white sharks, Arctic terns, and leatherback turtles. The research programme spans traditional disciplinary boundaries, involving various aspects of conservation biology, behavioural ecology, oceanography, geophysics, astronomy, biogeography, non-parametric statistics, software development, and animal tracking technology.
Richard has a background in neurophysiology, palaeobiology, and biogeography, and is currently involved in programmes using stable isotopes and ancient genetics to bridge the gap between palaeoecology and modern ecology. These underpin the original insights that brought him into migration research. Richard holds a Ph.D. in ornithology and palaeobiology, and a BSc (Hons) in neurophysiology and ornithology, both from the University of Canterbury.
5

IGNSS 2011 PROGRAM
Monday 14 November 2011
18.30-19.30 Pre Conference Session: Law Theatre G04, Law Building, UNSW Kensington Campus
The Migration Matrix: Marine Vertebrate Navigation in Magnetic Coordinate Space
Prof Richard Holdaway, Fixed-term Professor, School of Biological Sciences, University of Canterbury, Christchurch, New Zealand, and Palaecol Research Ltd, Christchurch, NEW ZEALAND.
Sponsored by Australian Centre for Space Engineering Research (ACSER)
Tuesday 15 November 2011
09:00-10:15 Session 1: Plenary Session
Chair: Matt Higgins Room: Central Lecture Block 7
09:00-09:15 Official Welcome – Mr Matt Higgins, President, IGNSS Society (Inc ESNC & Awards presentations)
09:15-09:45 United Nations Programme on Global Navigation Satellite Systems Ms Sharafat Gadimova, United Nations Office, Vienna, AUSTRIA
09:45-10:15 Status of the European GNSS Programmes: Galileo and EGNOS Mr Edgar M Thielmann, European Commission, Brussels, BELGIUM
10:15-10:45 Morning Tea and Trade Exhibition
10:45-12:15 Session 2: Plenary Session
Chair: Brett Biddington Room: Central Lecture Block 7
10:45-11:15 Cornerstones of a Vibrant Australian Space Industry Dr Rosalind Dubs, Chair, Space Industry Innnovation Council, Department of Innovation, Industry, Science and Research, Canberra, AUSTRALIA
11:15-11:45 Australia’s National Space Policy Mrs Michele Clement, Manager, Space Policy Unit, Department Of Innovation Industry Science & Research, Canberra, AUSTRALIA
11:45-12:15 Panel Session: Does Australia need a Space Agency? Dr Rosalind Dubs, Mrs Michele Clement, Mr Rob Lorimer – Facilitated by Mr Brett Biddington, Chair, Space Industry Association of Australia, Canberra, AUSTRALIA
12:15-13:15 Lunch, Trade Exhibition and Poster Presentations
13:15-14:55 Session 3A: Session 3B: Session 3C: Session 3D: Geodesy Infrastructure Ionosphere/Troposphere Weak Signals/AGNSS Attitude/Formation Flying
Chair: Richard Stanaway Chair: Matthew Trinkle Chair: Jinghui Wu Chair: Qinghua Zeng Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
13:15-13:35 National Positioning Infrastructure - Analyzing Zenith Path Delay in Efficient Implementation of Carrier Phase Integer Ambiguity Delivering Compatible Positioning Dynamically Changing Environment Collective Detection Resolution for GNSS-based Attitude Services from GNSS Reference Determination Station Networks Mr Grant Hausler, Cooperative Dr Kefei Zhang, The University of Mr Joon Wayn Cheong, The Mr Chen-Yin, Wang, National Research Centre For Spatial New South Wales, Sydney, AUSTRALIA University of New South Wales, Central University, TAIWAN, Information, Melbourne, AUSTRALIA Sydney, AUSTRALIA
13:35-13:55 AUSPOS2: An Update to Geoscience Consideration of RTZD Estimated Hybrid of Collective Detection Simulation Platform for Relative Australia’s Online GPS Positioning from Ground Reference Stations for with Conventional Detection for Navigation using GPS Carrier Service GNSS Application Weak Signal Acquisition Phase Measurements for Satellite Formation Flying Missions Dr. Minghai Jia, Geoscience Australia, Prof Joz Wu, National Central Mr Joon Wayn Cheong, The Mr Rui Li, The University of New Canberra, AUSTRALIA University, Taoyuan, TAIWAN University of New South Wales, South Wales, Sydney, AUSTRALIA Sydney, AUSTRALIA
13:55-14:15 An Infrastructure Approach to Performance Evaluation of Single Sensitivity Analysis of Assisted-Galileo Design and Analysis of Satellite Determining the “Fitness for use” of Frequency based Ionosphere Field Receiver with E1 OS Signal Orbits for the Garada Mission GNSS Measurements for Land-Based Monitor for GBAS Applications Mr Peter Ramm, The University of Dr Seigo Fujita, Electronic Navigation Mr Jeong-Min Lim, Chungnam Dr Li Qiao, The University of Melbourne, Melbourne, AUSTRALIA Research Institute, Tokyo, JAPAN National University, Daejeon, New South Wales, Sydney, SOUTH KOREA AUSTRALIA
6
IGNSSIGNSS20112011 15-17 November 2011

14:15-14:35 GNSS Modernisation and Recent Developments in Regional How good is Assisted GPS? Implications for Geodesy and Ionospheric Modelling and Monitoring Precision Users for GNSS Applications Prof Chris Rizos, The University of Dr Zahra Bouya, IPS Radio and Dr Binghao Li, The University of New South Wales, Sydney, AUSTRALIA Space Services, Sydney, AUSTRALIA New South Wales, Sydney, AUSTRALIA
14:35-14:55 The Australian Space Research Proposing a Multi-GNSS Assisted GNSS Program Project - Platform (Global Navigation Satellite System), Technologies for Space Atmosphere Concept and Performance and Climate Dr Kefei Zhang, RMIT University, Mr Ali Sarwar & Dr Eamonn Melbourne, AUSTRALIA Glennon, The University of New South Wales, Sydney, AUSTRALIA
14:55-15:25 Afternoon Tea and Trade Exhibition
15:25-17:05 Session 4A: Datums & Geodesy Session 4B: Other Location Systems Session 4C: GNSS Signal Simulation Session 4D: Indoor Positioning
Chair: Minghai Jia Chair: Chia-Chyang Chang Chair: Eamonn Glennon Chair: Thomas Gallagher Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
15:25-15:45 The Many Paths to Enlightenment: Visual Odometry and Inertial-SLAM A Flexible GNSS Signal Generation Real-time Indoor Positioning with a A Comparison of Transformations Integration for Large Scale and Receiver Characterization Single IMES Transmitter and a Between GDA94 and ITRF Navigation Platform Rotation-type Doppler Measurement Unit Dr Volker Janssen, NSW Land Dr Jonghyuk Kim, Australian Mr Kevin Parkinson & Dr Nagaraj Mr Yoshihiro Sakamoto, Waseda and Property Information, Bathurst, National University, Canberra, Shivaramaiah, The University of University, Tokyo, JAPAN AUSTRALIA AUSTRALIA New South Wales, Sydney, AUSTRALIA
15:45-16:05 Enhancement of the Asia Pacific Performance of Mobile WiMAX Decision of a Time-efficient Preliminary Study on Multi-Station Reference Frame (APREF) Through Geo-location Using Simplified Multipath Software-based GPS Signal GPS RTK Positioning to Support Accurate Metadata Maintenance and Mitigation Method in Dense Multipath Simulator Emergency Service Operations in Time Series Offset Detection Environment Indoor Areas Mr Manoj Deo, Geoscience Australia, Mr Ji-Won Park, Chungnam National Mr Soon Lim, Korea Astronomy and Dr Binghao Li, The University of New Canberra, AUSTRALIA University, Daejeon, SOUTH KOREA Space Science Institute, Daejeon, South Wales, Sydney, AUSTRALIA SOUTH KOREA
16:05-16:25 ITRF Transformations in Deforming A Relative Navigation Scheme Using Design of a GPS L1 C/A Signal An Enhanced Ranging Scheme Using Zones to Support CORS-NRTK the AIS Datalink Generator using a Multi-core Adaptive Log Model Based on IEEE Applications Processor 802.11 RSSI Measurements Mr Richard Stanaway & Dr Craig Mr Young Cheol Shin, Chungbuk Mr Sung Lyong Cho, Chungnam Mr A Sol Kim, Kyungpook National Roberts, The University of New South National University, Chongju, National University, Daejeon, University, Daegu, KOREA Wales, Sydney, AUSTRALIA SOUTH KOREA SOUTH KOREA
16:25-16:45 Establishing a Horizontal Velocity An DOP Relationship Between TOA and Development of MF-TDMA Based Indoor Positioning Based on FM Model of Taiwan Using GPS TDOA Navigations Without Clock Bias Satellite Network System Signals and Wi-Fi Signals Observations and the Least-Squares Simulation Model Collocation Technique Mr Ching-Jung Hung, National Cheng Mr Jae Young Ko, Chungnam National Mr Sung-Hyung Lee, Ajou Ms Vahideh Moghtadaiee, The Kung University, Tainan, TAIWAN & University, Daejeon, SOUTH KOREA University, Gyuoonggi-Do, KOREA University of New South Wales, Prof Ming Yang, National Cheng Kung Sydney, AUSTRALIA University, Tainan, TAIWAN
16:45-17:05 A Combination of Ellipsoidal Height Locata: Implications of a New High Feasibility Study of Seamless from Satellite Method and Orthometric Accuracy Positioning System Positioning System Using Height from Geodetic Levelling for QZSS IMES Geoid Modelling Mr Kamorudeen Aleem, Yanbu Prof Chris Rizos, The University of New Mr Yutaka Yamada, Tokyo Industrial College, Yanbu, South Wales, Sydney, AUSTRALIA University of Marine Science and SAUDI ARABIA Technology, Tokyo, JAPAN
17:15-19:15 Welcome Reception in the Trade Area
7
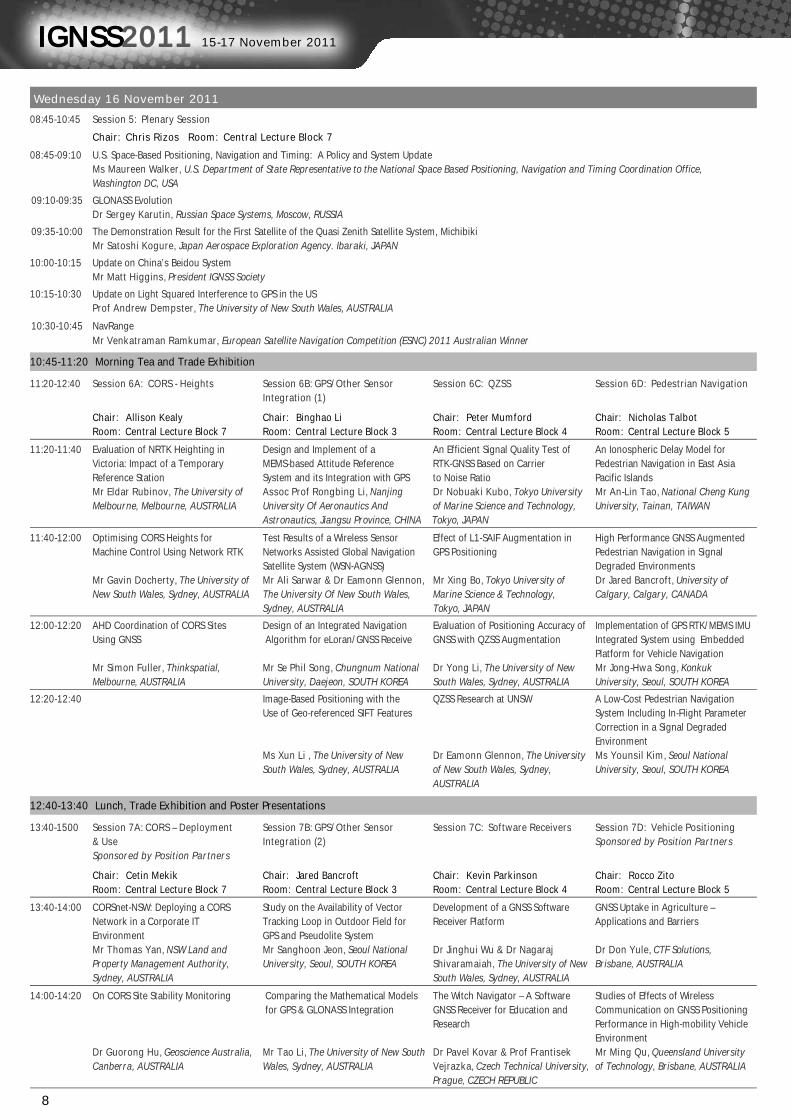
Wednesday 16 November 2011
08:45-10:45 Session 5: Plenary Session
Chair: Chris Rizos Room: Central Lecture Block 7
08:45-09:10 U.S. Space-Based Positioning, Navigation and Timing: A Policy and System Update Ms Maureen Walker, U.S. Department of State Representative to the National Space Based Positioning, Navigation and Timing Coordination Office, Washington DC, USA
09:10-09:35 GLONASS Evolution Dr Sergey Karutin, Russian Space Systems, Moscow, RUSSIA
09:35-10:00 The Demonstration Result for the First Satellite of the Quasi Zenith Satellite System, Michibiki Mr Satoshi Kogure, Japan Aerospace Exploration Agency. Ibaraki, JAPAN
10:00-10:15 Update on China’s Beidou System Mr Matt Higgins, President IGNSS Society
10:15-10:30 Update on Light Squared Interference to GPS in the US Prof Andrew Dempster, The University of New South Wales, AUSTRALIA
10:30-10:45 NavRange Mr Venkatraman Ramkumar, European Satellite Navigation Competition (ESNC) 2011 Australian Winner
10:45-11:20 Morning Tea and Trade Exhibition
11:20-12:40 Session 6A: CORS - Heights Session 6B: GPS/Other Sensor Session 6C: QZSS Session 6D: Pedestrian Navigation Integration (1)
Chair: Allison Kealy Chair: Binghao Li Chair: Peter Mumford Chair: Nicholas Talbot Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
11:20-11:40 Evaluation of NRTK Heighting in Design and Implement of a An Efficient Signal Quality Test of An Ionospheric Delay Model for Victoria: Impact of a Temporary MEMS-based Attitude Reference RTK-GNSS Based on Carrier Pedestrian Navigation in East Asia Reference Station System and its Integration with GPS to Noise Ratio Pacific Islands Mr Eldar Rubinov, The University of Assoc Prof Rongbing Li, Nanjing Dr Nobuaki Kubo, Tokyo University Mr An-Lin Tao, National Cheng Kung Melbourne, Melbourne, AUSTRALIA University Of Aeronautics And of Marine Science and Technology, University, Tainan, TAIWAN Astronautics, Jiangsu Province, CHINA Tokyo, JAPAN
11:40-12:00 Optimising CORS Heights for Test Results of a Wireless Sensor Effect of L1-SAIF Augmentation in High Performance GNSS Augmented Machine Control Using Network RTK Networks Assisted Global Navigation GPS Positioning Pedestrian Navigation in Signal Satellite System (WSN-AGNSS) Degraded Environments Mr Gavin Docherty, The University of Mr Ali Sarwar & Dr Eamonn Glennon, Mr Xing Bo, Tokyo University of Dr Jared Bancroft, University of New South Wales, Sydney, AUSTRALIA The University Of New South Wales, Marine Science & Technology, Calgary, Calgary, CANADA Sydney, AUSTRALIA Tokyo, JAPAN
12:00-12:20 AHD Coordination of CORS Sites Design of an Integrated Navigation Evaluation of Positioning Accuracy of Implementation of GPS RTK/MEMS IMU Using GNSS Algorithm for eLoran/GNSS Receive GNSS with QZSS Augmentation Integrated System using Embedded Platform for Vehicle Navigation Mr Simon Fuller, Thinkspatial, Mr Se Phil Song, Chungnum National Dr Yong Li, The University of New Mr Jong-Hwa Song, Konkuk Melbourne, AUSTRALIA University, Daejeon, SOUTH KOREA South Wales, Sydney, AUSTRALIA University, Seoul, SOUTH KOREA
12:20-12:40 Image-Based Positioning with the QZSS Research at UNSW A Low-Cost Pedestrian Navigation Use of Geo-referenced SIFT Features System Including In-Flight Parameter Correction in a Signal Degraded Environment Ms Xun Li , The University of New Dr Eamonn Glennon, The University Ms Younsil Kim, Seoul National South Wales, Sydney, AUSTRALIA of New South Wales, Sydney, University, Seoul, SOUTH KOREA AUSTRALIA
12:40-13:40 Lunch, Trade Exhibition and Poster Presentations
13:40-1500 Session 7A: CORS – Deployment Session 7B: GPS/Other Sensor Session 7C: Software Receivers Session 7D: Vehicle Positioning & Use Integration (2) Sponsored by Position Partners Sponsored by Position Partners
Chair: Cetin Mekik Chair: Jared Bancroft Chair: Kevin Parkinson Chair: Rocco Zito Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
13:40-14:00 CORSnet-NSW: Deploying a CORS Study on the Availability of Vector Development of a GNSS Software GNSS Uptake in Agriculture – Network in a Corporate IT Tracking Loop in Outdoor Field for Receiver Platform Applications and Barriers Environment GPS and Pseudolite System Mr Thomas Yan, NSW Land and Mr Sanghoon Jeon, Seoul National Dr Jinghui Wu & Dr Nagaraj Dr Don Yule, CTF Solutions, Property Management Authority, University, Seoul, SOUTH KOREA Shivaramaiah, The University of New Brisbane, AUSTRALIA Sydney, AUSTRALIA South Wales, Sydney, AUSTRALIA
14:00-14:20 On CORS Site Stability Monitoring Comparing the Mathematical Models The Witch Navigator – A Software Studies of Effects of Wireless for GPS & GLONASS Integration GNSS Receiver for Education and Communication on GNSS Positioning Research Performance in High-mobility Vehicle Environment Dr Guorong Hu, Geoscience Australia, Mr Tao Li, The University of New South Dr Pavel Kovar & Prof Frantisek Mr Ming Qu, Queensland University Canberra, AUSTRALIA Wales, Sydney, AUSTRALIA Vejrazka, Czech Technical University, of Technology, Brisbane, AUSTRALIA Prague, CZECH REPUBLIC
8
IGNSSIGNSS20112011 15-17 November 2011

14:20-14:40 Network-based RTK Positioning Using Preciser Positioning and Timing with Design of a Correlator using GPU for A Particle Filter Based State Integrated GPS and GLONASS the Measured Time Offset Real-time GNSS SDRs Estimation of Semitrailer Vehicle for Observations Jackknifing Prevention Dr Shaocheng Zhang & Dr Kefei Mr Nathan Knight, The University of Mr Sang Wook Hwang, Chungnam Ms Hee Won Kang, Korea Aerospace Zhang, RMIT University, Melbourne, New South Wales, Sydney, AUSTRALIA National University, Daejeon, Research Institute, Daejeon, AUSTRALIA SOUTH KOREA SOUTH KOREA
14:40-15:00 Latest Advancements in Network GPS/MEMS IMU Integration System High-Precision GPU (Graphic Inertial-Aided Visual Odometry for RTK Positioning Design for Car Black Box Processing Unit)-Based Software- Automotive Applications Defined Real-time GNSS Signal Monitoring Receiver Dr Nick Talbot, Trimble Navigation, Mr Moon Suk Koo, Chungnam National Mr Sung-Hyuck Im, Konkuk Mr Rocco Zito, University of South Melbourne, AUSTRALIA University, Daejeon, SOUTH KOREA University, Seoul, SOUTH KOREA Australia, Adelaide, AUSTRALIA
15.00-15:30 Afternoon Tea and Trade Exhibition
15:30-17:10 Session 8A: CORS - Regional Session 8B: GPS/Inertial Integration Session 8C: Namuru & FPGA Session 8D: Cooperative Vehicle to Global Receivers Positioning Sponsored by Position Partners
Chair: Ming Yang Chair: Jared Bancroft Chair: Frantisek Vejrazka Chair: Chung-Liang Chang Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
15:30-15:50 Positional Stability Study of Enhanced RTK-GPS with IMU and Namuru V3.X; the Next Generation A Cooperative Positioning Method Continuously Operating Reference Vehicle Sensors in Urban Environment of FPGA-Based GNSS Research for VANETs using DSRC Carrier Stations: Case Study of Tianjin CORS Receivers Frequency Offset Ms Ying Xu, Wuhan University, Mr Dihan Chen & Dr Nobuaki Kubo, Mr Peter Mumford, The University Mr Nima Alam, The University of Hubei, CHINA Tokyo University of Marine Science of New South Wales, Sydney, New South Wales, Sydney, and Technology, Tokyo, JAPAN AUSTRALIA AUSTRALIA
15:50-16:10 Assessment of Network RTK A Novel Design for the Ultra-tightly Aquarius Firmware for UNSW Namuru Evaluation of a Cooperative Performance using CORSnet-NSW Coupled GPS/INS Navigation Systems GPS Receivers Positioning Algorithm by Tight GPS/ DSRC Integration for Vehicular Networks Dr Volker Janssen, NSW Land and Prof Dah-Jing Jwo, National Taiwan Dr Eamonn Glennon, The University Mr Nima Alam, The University of Property Information, Bathurst, Ocean University, Keelung, TAIWAN of New South Wales, Sydney, New South Wales, Sydney, AUSTRALIA AUSTRALIA AUSTRALIA
16:10-16:30 An Overview on RTK Network of Analysis of Outlier Separability in A Low Cost Namuru V3 receiver for Performance Boundaries for Turkish Republic (TUSAGA-Aktif) Integrated GPS/INS Systems Spacecraft Operation Cooperative Positioning in VANETs Dr Cetin Mekik, Zonguidak Karaelmas Mr Ali Almagbile, The University Of Mr Kevin Parkinson & Mr Peter Mr Nima Alam, The University of University, Zonguldak, TURKEY New South Wales, Sydney, AUSTRALIA Mumford, The University of New New South Wales, Sydney, South Wales, Sydney, AUSTRALIA AUSTRALIA
16:30-16:50 AllDayRTK – A National CORS Network A Regularized Robust Filter for Baseband Hardware Design for Next Generation Vehicle Positioning for Australia Satellite Attitude Determination System Space-grade Multi-GNSS Receivers Systems Integrated with Wireless with Relative Installation Error of Communications to Address Sensor Tracker Cooperative ITS Challenges in Australia Mr Gavin Docherty, The University of Dr Jiongqi Wang & Prof Haiyin Zhou, Dr Nagaraj Shivaramaiah, The Prof Yanming Feng, Queensland New South Wales, Sydney, AUSTRALIA National University of Defense University of New South Wales, University of Technology, Brisbane, Technology, Changsha, CHINA Sydney, AUSTRALIA AUSTRALIA
16:50-17:10 The Practicalities of Running CORS Influence of Maneuvers on the FPGA Implementation of a GBAS A Filtering Method for Improving the Based Services – a SmartNet Observability of INS/GPS Prototype Receiver for Integrity precision of Cooperative Positioning Perspective Initial Alignment Monitoring Test-bed in VANETs Mr Aaron Jordan, SmartNet Aus, Prof Xiaosu Xu, Southeast Mr Chien-Ho Chen, National Cheng Mr Nima Alam, The University of New Brisbane, AUSTRALIA University, Nanjing, CHINA Kung University, Tainan, TAIWAN South Wales, Sydney, AUSTRALIA
17:10-20:00 Networking BBQ (Proudly sponsored by NovAtel Inc)
Thursday 17 November 2011
09:00-10:40 Session 9A: Ambiguity Resolution Session 9B: Multipath Session 9C: Interference 1 Session 9D: Other Applications & Reflectometry
Chair: Peter Ramm Chair: Nobuaki Kubo Chair: Nagaraj Shivaramaiah Chair: Don Yule Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
09:00-09:20 GNSS Carrier Phase Ambiguity GPS Bistatic Radar for Target Interference Localisation within the Development of A Tsunami Resolution Aided by Float Detection and Estimation using GNSS Environmental Monitoring Monitoring System using GPS Buoy Transformation Antenna Arrays System (GEMS) Mr Yang-Zen Chen, National Central Mr Matthew Trinkle, The Adelaide Dr Ediz Cetin, The University of New Prof Yukihiro Terada, Kochi National University, Taoyuan, TAIWAN University, Adelaide, AUSTRALIA South Wales, Sydney, AUSTRALIA College of Technology, Kochi, JAPAN
9

09:20-09:40 GNSS Ambiguity Resolution: Which A Gain/Phase and Mutual Coupling Detection and Jammer-to-Noise Ratio Study on Precise Positioning for Subset to Fix? Calibration Algorithm for GPS Antenna Estimation of Interferers Using the Maritime Transportation Safety Array in the Presence of Multipath Automatic Gain Control Dr Peter Teunissen, Curtin University Mr Matthew Trinkle, The Adelaide Mr Ryan Thompson, The University Mr Deuk Jae Cho, Korea Ocean of Technology, Perth, AUSTRALIA University, Adelaide, AUSTRALIA of New South Wales, Sydney, Research & Development Institute, AUSTRALIA Yuseong-Gu, KOREA
09:40-10:00 Reliability of Partial Ambiguity Assessment of Multipath Mitigation Influence of GPS Satellites Cross- Performance Analysis of Carrier Resolution with Multi-GNSS with Vector Tracking Loop Correlation on the TDOA Smoothed DGPS for Swarm Robots Constellations Measurements within the GNSS Environmental Monitoring System (GEMS) Prof Yanming Feng, Mr Li-Ta Hsu, National Cheng Kung Mr Ryan Thompson, The University Ms Hyun-Ja Im, Electronics and Queensland University of University, Tainan, TAIWAN of New South Wales, Sydney, Telecommunications Research Technology, Brisbane, AUSTRALIA AUSTRALIA Institute, KOREA
10:00-10:20 Cycle Slip Detection Algorithm by Analysis of the Multipath Effect on Interference Angle of Arrival The Principle of Determining the Integrating Vehicle and Inertial Carrier Smoothed Code Measurements Estimation within the GNSS Geopotential Difference Between Two Sensors for Land Vehicle Users Environmental Monitoring System Points on Ground Using GNSS Signal (GEMS) using Antenna Arrays Ms Younsil Kim, Seoul National Mr Heon Ho Choi, Chungnam National Mr Matthew Trinkle, The Adelaide Prof WenBin Shen, Wuhan University, Seoul, SOUTH KOREA University, Daejeon, SOUTH KOREA University, Adelaide, AUSTRALIA University, Wuhan, CHINA
10:20-10:40 Sea Surface Roughness Estimation A Comparative Analysis of Using Signals for Multiple GPS Satellites Displacement Detection Methods Using Locata Dr Kegen Yu, The University of New Mr Mazher Choudhury, The South Wales, Sydney, AUSTRALIA University of New South Wales, AUSTRALIA Sydney, AUSTRALIA
10:40-11:10 Morning Tea and Trade Exhibition
11:10-12:50 Session 10A: PPP & Carrier Phase Session 10B: Chinese Satnav Session 10C: Interference 2/ Session 10D: UAV’s Systems Antennas Sponsored by Position Partners
Chair: Peter Teunissen Chair: Yanming Feng Chair: Ediz Cetin Chair: Jinling Wang Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
11:10-11:30 Precise Point Positioning – Where Research on BEIDOU and Modernized Bit Error Rate Performance of Multi-Sensor Data Fusion for Small are we now? GNSS Multi-constellation Integrated SFH-Modulation Scheme System Unmanned Aircraft Systems Navigation under Jamming Mr Thomas Grinter, NSW Land Assoc Prof Qinghua Zeng, Nanjing Mr Kwang-Chun Go, Ajou Mr Claus-Sebastian Wilkens, & Property Information, University of Aeronautics and University, Yeoungtong-Gu, Institute of Aerospace Systems, Bathurst, AUSTRALIA Astronautics, Jiangsu CHINA SOUTH KOREA Braunschweig, GERMANY
11:30-11:50 An Accurate Single Point Positioning The Transmitting Satellite Navigation GAJT - The First “Off The Shelf” Development of an Unmanned Aerial Method with Prediction Mode System Based on Communication Single Unit GPS Anti-Jam Antenna Vehicle Platform for Testing for LEO Satellites Satellites Positioning Technology Ms Yuanyuan Jiao & Dr Jiongqi Dr Lihua Ma, National Astronomical Mr Rod MacLeod, NovAtel Inc, Mr Jiawei Xie, The University Wang, National University of Defense Observatories of Chinese Academy Sydney, AUSTRALIA Of New South Wales, Sydney, Technology, Changsha, CHINA of Sciences, Beijing, CHINA AUSTRALIA
11:50-12:10 Outlier Detection Performance in Experimental Evaluation of Fast Beidou A Lock Detector for Signal Use of GPS/INS Observations for Precise Point Positioning Orientation Ambiguity Resolution using Blockage Detection in GPS Efficient Matching of UAV Images the Lengthening Baseline Method Receivers Mr Changhui Xu The University of Assoc Prof Liangqing Lu, National Ms Mi Hyun Jin, Chungnam Ms Juan Shi, The University of New South Wales, Sydney, University Of Defense Technology, National University, Daejeon, New South Wales, Sydney, AUSTRALIA Changsha, CHINA SOUTH KOREA AUSTRALIA
12:10-12:30 Carrier Phase Based Positioning Improving GNSS Antennas Using Algorithms Applied by Gaussian Electromagnetic Band Gap Sum Filters Structures Assoc Prof Yukihiro Kubo, Mr Kevin Parkinson & Dr Eamonn Ritsumeikan University, Kusatsu, JAPAN Glennon, The University Of New South Wales, Sydney, AUSTRALIA
12:30-12:50 A Study on Cycle Slip Detection and Performance Evaluation of Array Correction in Case of Ionospheric Antenna Processing with PM Algorithm Scintillation for GNSS Receivers Dr Wu Chen, The Hong Kong Mr Yun Sub Choi, Chungnam National Polytechnic University, Hong Kong, CHINA University, Daejeon, SOUTH KOREA
12:50-13:50 Lunch, Trade Exhibition and Poster Presentations
12:50-16:30 Field Day Demonstrations
10
IGNSSIGNSS20112011 15-17 November 2011

13:50-15:30 Session 11A: Robust CP Positioning Session 11B: Occultation/ Session 11C: Mixed Stream/ Session 11D: Airborne Space Weather Late Papers Applications
Chair: Allison Kealy Chair: Matthew Trinkle Chair: Yong Li Chair: Rod Macleod Room: Central Lecture Block 7 Room: Central Lecture Block 3 Room: Central Lecture Block 4 Room: Central Lecture Block 5
13:50-14:10 Reliability Analysis of Robust Radio Occultation Study Using 3-D A Study on Long-Term Predicted The Airborne Science Initiative LiDAR Estimation for Use GNSS Positioning, Numerical Ray Tracing Ephemeris for GPS Satellite Beach Survey; Development & Results Ms Ling Yang, The University of Dr Robert Norman, RMIT University, Ms Cen Xiao & Prof Akio Yasuda, Mr Peter Mumford, The University Of New South Wales, Sydney, AUSTRALIA Melbourne, AUSTRALIA Tokyo University of Marine Science New South Wales, Sydney, AUSTRALIA and Technology, Tokyo, JAPAN
14:10-14:30 A-RAIM vs. R-RAIM: A Comparative Constellation Design and Antenna Correlation of Land Surface Optimization-based In-flight Study Array Processing for GNSS Radio Temperature and Vegetation Density Alignment for Airborne INS/GPS Occultation Mission Classified from Satellite Images Navigation Miss Yiping Jiang, The University Dr Yung-Fu Tsai & Prof Jyh-Ching Ms Nang Mya Mya Nwe, Tokyo Assoc Prof Yuanxin Wu & Dr of New South Wales, Sydney, Juang, National Cheng Kung University, University of Marine Science Xianfei Pan, National University of AUSTRALIA Tainan, TAIWAN and Technology Defense Technology, Changsha, CHINA
14:30-14:50 Effects of Different Reference Receiver The Application of Radio Occultation Global Tropopause Derived from Validation of Interacting Multiple Setups on IMT Performance for Climate and Weather Monitoring COSMIC for Climate Study Model Estimator in Radar Tracking and Numerical Weather Prediction in System Australian Region Mr Hui-Chieh Hsu, National Cheng Prof John Le Marshall, Bureau of Ms Ying Li, RMIT University, Mr Yu-Chun Kao, National Cheng Kung University, Tainan City, TAIWAN Metereology, Melbourne, AUSTRALIA Melbourne, AUSTRALIA Kung University, Tainan, TAIWAN
14:50-15:10 Performance Improvement of RTK By Space Weather Effects on the GPS Evaluation of APNT using ADS-B Using Variable-Mask Strategy Scintillation Levels Received From Radio Radio Occultations Dr Hideki Yamada, Electronic Dr Brett Carter, RMIT University, Mr Hou-Jen Chen, National Cheng Navigation Research Institute, Melbourne, AUSTRALIA Kung University, Tainan, TAIWAN Tokyo, JAPAN
15:10-15:30 INS Aided Integrated Ambiguity Investigation of Atmospheric Resolution for Robust Precise Parameters in the Australian Region Positioning under the Week Using GPS Radio Occultation signal Environment Technology Ms Sul Gee Park, Korea Ocean Dr Chuan-Sheng Wang, RMIT Research& Development Institute, University, Melbourne, AUSTRALIA Daejeon, SOUTH KOREA
15:30-16:30 Close of Educational Sessions – Closing Drinks
Interactive Poster PresentationsTuesday 12:15-13:15 The following Authors will be at their posters during this time
POSTER 1 A New Velocity Field from a Dense GPS Array in Southeastern Taiwan Dr Horng-Yue Chen, Institute Of Earth Sciences, Academia Sinica, Taipei, TAIWAN
POSTER 2 Applications of Indoor Locating Technique Based on Various Types of RFID Dr Chia-Chyang Chang, Ching-Yun University, Taoyuan, TAIWAN
POSTER 3 A Compressive Sampling Approach to Narrowband Interference Elimination for GNSS
Dr Chung-Liang Chang, National Pingtung University of Science and Technology, Pingtung County, TAIWAN
POSTER 4 Dynamic Modelling for MEMS-IMU/Magnetometer Integrated Attitude and Heading Reference System Mr Wei Li & Prof Jinling Wang, The University of New South Wales, Sydney, AUSTRALIA
Wednesday 12:40 -13:40 The following Authors will be at their posters during this time
POSTER 5 Determination of Sudden Crustal Deformation by Earthquake Ms Su-Kyung Kim & Prof Tae-Suk Bae, Sejong University, Seoul, SOUTH KOREA
POSTER 6 The RAIM Based Airborne Ionosphere Anomaly Monitoring Algorithm Using the Differential Hatch Filters Mr Jun Min Joo, Korea Aerospace Research Institute, Daejeon, SOUTH KOREA
POSTER 7 Enhanced Time Transfer of Loran-C by Temperature Compensation Dr Chang-Bok Lee, Korea Research Institute Of Standards And Science, Daejeon, SOUTH KOREA
POSTER 8 A TDOA Based BLUE Estimator for a 3-D Localization Dr Young Kyu Lee, Korea Research Institute of Standards and Science, Daejeon, SOUTH KOREA
Thursday 12:50-13:50 The following Authors will be at their posters during this time
POSTER 9 Withdrawn
POSTER 10 Acquisition Complexity Reduction by Multi-stage Partial Cross-Correlation Technique for GPS Receiver Mr Jae-Kil Kim, Chungnam National University, Daejeon, SOUTH KOREA
POSTER 11 Impact of the Raw Modeling on the Precision GPS Orbit Determination Prof Tae-Suk Bae & Ms Su-Kyung Kim, Sejong University, Seoul, SOUTH KOREA
11
NOTE: This is a Preliminary Program
only. The IGNSS Society reserves the right to
change any part of this program prior to the
symposium.
POSTER SESSIONS:Posters will be displayed in The Pavilions from 10.15am on Tuesday until 2.00pm on Thursday. Authors will be available at their posters for questions and discussion during the lunch break on the day nominated in the above program.
SYMPOSIUM PROCEEDINGS:IGNSS 2011 Proceedings will be posted to the IGNSS websi te shortly after the conclusion of the IGNSS2011 Symposium. Delegates will be advised by email when the Proceedings are available.
TECHNICAL SESSIONS AND SOCIAL FUNCTIONSDelegates are required to wear their name tags at all times to have access to the technical sessions and social functions.
Delegates not wearing name badges will be refused access to the technical sessions and social functions.
ON SITE REGISTRATIONSOn site registrations can be made at the IGNSS Registration desk located in the Foyer of the CLB Lecture Theatres at the University of New South Wales. NO shared registrations are permitted.
Onsite Registrat ion Fees applicable are as fol lows:
Full Registration Member $945.00
Full Registration Non Member $1045.00
Day Registration $495.00
Student Registration* $495.00
*A copy of your full-time student/concession card must accompany your registration to receive this discounted rate.
Ful l Symposium and Student Registrat ions include:
Attendance to all Symposium Sessions
Attendance at the Trade Exhibition
Morning/afternoon tea and lunch on all symposium days.
Attendance at the Welcome Reception
Attendance at the NovAtel Aussie BBQ
Symposium Handbook
Symposium Satchel
Delegate list will be displayed on a poster board adjacent to the registration desk.
Day Registrat ion includes:
Attendance to Symposium Sessions on registered day
Attendance at the Trade Exhibition
Morning/afternoon tea and lunch on registered day
Symposium Handbook
Symposium Satchel
Delegate list will be displayed on a poster board adjacent to the registration desk.
*Day registrations do not include the Welcome Reception or Aussie BBQ
IGNSSIGNSS20112011 15-17 November 2011
12
www.ignss.org
13
REGISTRATION DESK OPENING TIMES
Monday 14th November, 2011:
3pm – 5pm: Clancy Back Counter – opposite The Pavilions
Tuesday 15th November, 2011:
8.00am – 4.30pm: CLB Lecture Theatres – Commerce Courtyard
Wednesday 16th November, 2011:
8.30am – 4.30pm: CLB Lecture Theatres – Commerce Courtyard
Thursday 17th November, 2011:
8.30am – 2.00pm: CLB Lecture Theatres – Commerce Courtyard
INTERNET ACCESSOn Tuesday morning between 8.00 am and 9.00 am, a desk will be set up adjacent to the registration desk in the CLB Lecture Theatres where a representative from the IT department of UNSW will be available to assist delegates with the set up of their internet. In order to register for internet, delegates will need to provide their name and email address.
Volunteer UNSW students will also be at the UNSW Exhibition Booth 3 in the Pavilions to assist delegates with setting up their internet
SOCIAL FUNCTIONS
Welcome Reception – Tuesday 15 November, 2011
5.15pm –7.15pm – The Pavilions, UNSW
Inclusive for all full symposium registrants only
Delegates are required to wear their name tags to be served during this function.
Includes canapés, beer, wine and soft drinks
Additional tickets may be purchased from the Registration Desk: $50.00 per ticket
NovAtel Aussie BBQ – Wednesday 16 November, 2011
(Proudly sponsored by NovAtel Inc).
5,10pm – 8.00pm – The Pavilions Courtyard, UNSW
Inclusive for all full symposium registrants only
Delegates are required to wear their name tags to be served during this function.
Includes Aussie BBQ, beer, wine and soft drinks
Additional tickets may be purchased from the Registration Desk: $65.00 per ticket
14
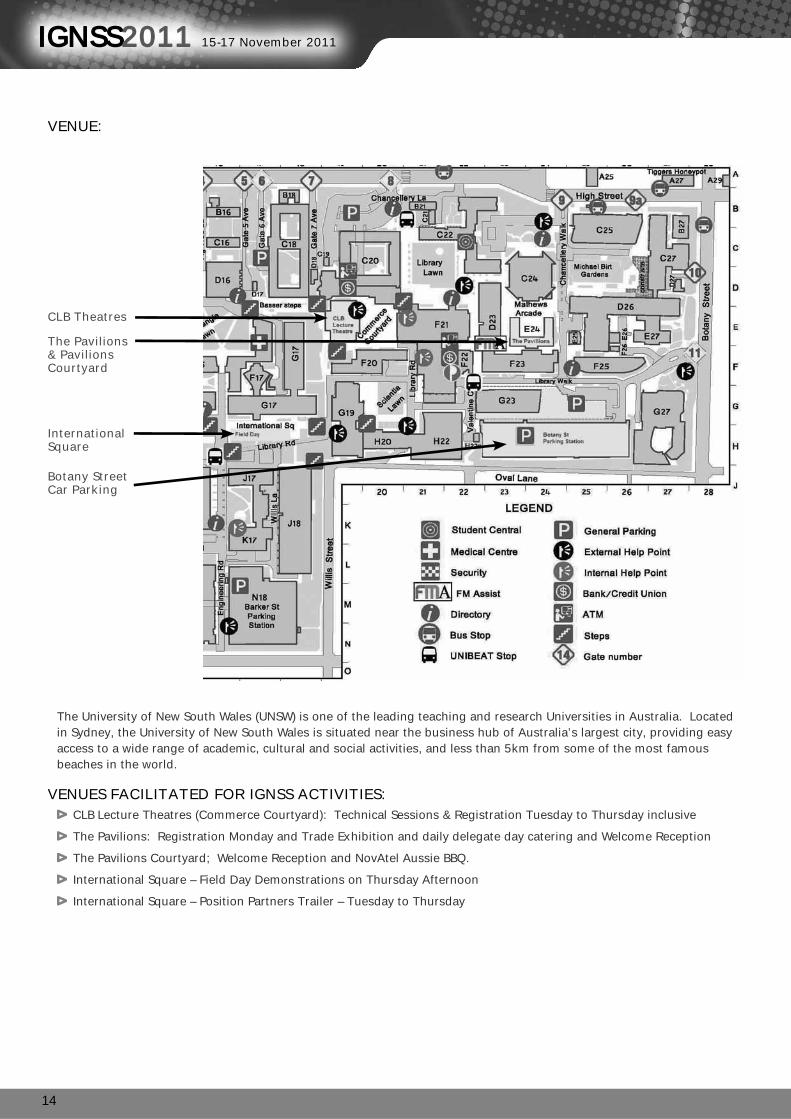
VENUE:
The University of New South Wales (UNSW) is one of the leading teaching and research Universities in Australia. Located in Sydney, the University of New South Wales is situated near the business hub of Australia’s largest city, providing easy access to a wide range of academic, cultural and social activities, and less than 5km from some of the most famous beaches in the world.
VENUES FACILITATED FOR IGNSS ACTIVITIES: CLB Lecture Theatres (Commerce Courtyard): Technical Sessions & Registration Tuesday to Thursday inclusive
The Pavilions: Registration Monday and Trade Exhibition and daily delegate day catering and Welcome Reception
The Pavilions Courtyard; Welcome Reception and NovAtel Aussie BBQ.
International Square – Field Day Demonstrations on Thursday Afternoon
International Square – Position Partners Trailer – Tuesday to Thursday
The Pavilions & Pavilions Courtyard
CLB Theatres
International Square
Botany Street Car Parking
IGNSSIGNSS20112011 15-17 November 2011

www.ignss.org
15
ON SITE PARKING AND VEHICULAR ACCESSIBILITY:All day parking is available on the upper floors of the Botany Street Parking Station – enter via gate 11. The cost for metered parking is $3 per hour, all day parking = minimum $6 for 3 hours, and $2.00/hr thereafter up to 12 hours (cash and credit card payment ) Gold coins are required.
UNSW Maps for Kensington Campus, Central Lecture Block, Pavilions and Parking Stations can be accessedby linking to http://www.facilities.unsw.edu.au/Maps/maps.html
ACCESS BY BUS:
Delegates who will travel from Coogee Beach to the UNSW each day, can do so from Arden Street on Bus 370 (refer to Coogee Beach Map above). The drop off point at UNSW is Bus Stop 7 (refer to map of UNSW on previous page), High Street. Gate 9 is the closest pedestrian access, just a short walk to the symposium.
At the end of the day Bus 370 will stop at Bus Stop 8 UNSW and travel to Coogee Beach, a 10-15 minute ride. Apart from accommodation advertised for delegates at Coogee Beach, there is a multitude of restaurants to choose from in the local area
Further information can be found on the following web-site by entering (370) into the timetable and map search on the right hand side of the page: www.sydneybuses.info
RESTAURANTS:There are an abundant number of restaurants to suit all tastes and budgets to choose from within easy walking distance of the University at Randwick and in the Coogee Bay area.
NAME BADGESYour name badge must be worn at all times, as it is your entry to all sessions and inclusive functions. Entry will not be permitted unless you are wearing your name badge or have a ticket to attend.

16
SPONSOR & EXHIBITOR ORGANISATION PROFILE
Organisation Cody Corporation Booth Nos: 1 & 2 Contact Person: Barry Liston Email: [email protected] Phone: 08 8337 4888 Fax: 08 8337 4333 URL: www.codycorp.com.au
With a history of servicing the survey & GIS industry for over 25 years, Cody Corporation are the exclusive distributors of the Nikon & Ashtech product range. Contact Cody for your local authorised stockist.
Organisation: C.R. Kennedy Survey Solutions Booth No(s): 10 & 11 Contact Person: John DaMina Email: [email protected] Phone: 02 9552 8370 Fax: 02 9552 8390 URL: http://www.crkennedy.com.au
Showcasing Leica Geosystems’ GNSS Viva family - GS15 Smart Antenna GS15 controller and the Australian release of the Leica Viva GS25, the ultimate high-end GNSS survey receiver.
Organisation: GlobalPOS Pty Ltd Booth No: 19 Contact Person: Evan Bollard Email: [email protected] Phone: 0429342498 Fax: 07 34880075 URL: www.globalpos.com.au
High accuracy GNSS equipment. Sales, Hire and Support.Reference station, Survey, Mapping and OEM products from major manufacturers for all applications. Please visit us at IGNSS.
Organisation: GPSat Systems Australia Pty Ltd Booth No(s): 8 & 9 Contact Person: Graeme Hooper Email: [email protected] Phone: 03 9455 0041 Fax 03 9455 0042 URL: www.gpsatsys.com.au
GPSat Systems Aust is the sole regional distributor for NovAtel Inc precision GPS/GNSS Receivers and Spirent Communications GNSS Simulation equipment. The leader in delivering to industry innovative satellite navigation equipment, technical GPS/ GNSS system solutions, research and consultancy services.
Organisation: NovAtel Inc Booth No(s): 8 & 9 Contact Person: Rod Macleod Email: [email protected] Phone: 0400 883 601 URL: www.novatel.com
NovAtel Inc. is a leading original equipment manufacturer (OEM) of precision Global Navigation Satellite System (GNSS) components and subsystems, including GNSS receivers, antennas, enclosures and firmware.
IGNSSIGNSS20112011 15-17 November 2011
www.ignss.org
17
Organisation: OmniSTAR Booth No: 4 Contact Person: Keith Dyer Email: [email protected] Phone: 1800 062 221 Fax: +61 8 9322 4164 URL: www.omnistar.com.au
OmniSTAR is the market leader in providing precise and reliable satellite delivered Differential GPS augmentation services worldwide. OmniSTAR offers a variety of accuracies to suit different project requirements.
Organisation: Position Partners Booth No(s): 17 & 18 Email: [email protected] Phone: 1300 867 266 (1300 TOPCON) URL: www.positionpartners.com.au
With offices in every state and around 160 people, Position Partners is the largest Australian-owned company focussing entirely on the distribution and support of positioning and machine control solutions for land management, civil works and building projects.
Organisation: SmartNet Aus
Booth No: 13 Contact Person: Aaron Jordon Email: [email protected] Phone: 07 3891 9772 URL: www.smartnetaus.com
Australian subscription based service offering high precision , high availability GNSS Network RTK corrections for any application. Built on GNSS Spider software and providing a variety of real-time data products
Organisation: SOUTH Surveying & Mapping Instrument (Australia) Pty Ltd Booth No: 14 Contact Person: John Dong Email: [email protected] Phone: 0433 658 832 URL: www.southinstrument.com.au
With a complete line of products, SOUTH, the biggest Chinese manufacturer, provides GPS systems of different demands at different accuracy level, (RTK, handheld GIS data collector etc). Also, regular instruments (total station, etc) and surveying accessories are available from SOUTH.
Organisation: TRIMBLE Booth No: 7 Contact Person: Paul Drummond Email: [email protected] Phone: +64 3 963 5527 URL: www.trimble.com
Trimble’s industry-leading GNSS infrastructure systems support a host of major GNSS networks globally including Australia. Major software include Trimble VRS3Net for scalable CORS, Trimble 4D Control for monitoring and Trimble Atmosphere for atmospheric conditions calculation based on GNSS data and weather station information
Organisation: University of NSW, School of Surveying & Spatial Information Systems Booth No: 3 Contact Person: Maria Ponce Email: [email protected] Phone: 02 9385 4182 Fax: 02 9313 7493 URL: www.gmat.unsw.edu.au
The School offers undergraduate degrees in the areas of Surveying and Geoinformation Systems as well as postgraduate research opportunities. Research directions include; earth observation (radar remote sensing, deformation monitoring), GNSS algorithms, multi-sensor integration and new positioning technologies.

18
POSITION PARTNERS – DISPLAY TRAILER Refer advertisement on the back page of this Handbook
Visit the Position Partners display trailer in International Square for all the latest survey, GNSS, mapping and scanning solutions. Live product demos, 3D cinema and a chance to discuss your requirements with our expert team. Further information regarding the trailer can be obtained from the Position Partners Booths 17 & 18 in the Pavilions Trade Display Area.
Trailer Opening Hours:
Tuesday 15th: 9am – 5pm
Wednesday 16th: 9am – 5pm
Thursday 17th: 9am – 4.30pm
FIELD DAY DEMONSTRATIONS:For the first time, the IGNSS Sponsors and Trade Exhibitors will include GNSS demonstrations and an interactive “field day”. This will be held in International Square on Thursday afternoon between 2.00pm – 4.30pm.
Sponsor and Exhibitor Listings of equipment being demonstrated is listed below. Please visit Exhibitors booths to find out more about the equipment being demonstrated.
Closing drinks will be held between 3.30pm – 4.30pm in International Square
Position Partners
The Position Partners Display Trailer is located in International Square and will be open throughout the symposium (hours listed above).
Cody Corporation
Ashtech ProMark 500 GNSS Receiver: The Ashtech Promark 500 rover and rover/base system offers GPS, GLONASS – a powerful RTK solution.
C.R. Kennedy Survey Solutions
This year, C.R.Kennedy celebrates the 10th anniversary as the proud Australian distributor of the Leica Geosystems range of surveying products. At the IGNSS Field Day we will demonstrate the latest in Leica GNSS technology, including the popular Viva GS15 and GS08 RTK Rovers and the newly released GR25 and GR10 reference station receivers.
GlobalPOS Pty Ltd
The Septentrio AsteRx2i receiver is an integrated system using GPS and Glonass DGPS or RTK observations with an associated IMU to provide PVT and Attitude (heading, pitch and roll) even when GNSS signals are not available. It processes high-quality GNSS measurements with IMU-measurements to generate an enhanced integrated position. A small model will demonstrate this including a simple display.
SOUTH Surveying & Mapping Instrument (Australia) Pty Ltd
A professional GPS manufacturer from China comes with the high cost-performance RTK system S82V for you! Carlson SurvCE on board, compatibility to different brands of receivers and radios, huge memory capacity and built-in transmitter make it a powerful kit! Interested? Check it now! Total station, other accessories available also here
TRIMBLE
See the ‘NEW’ Trimble Hand Held RTK GeoXR CORS receiver using COSRnet-NSW
University of NSW – School of Surveying & SIS
Prototype GPS Interference Localisation System for GEMS. A prototype system for real-time localization of interferences to GPS in a given area using Direction of Arrival and Time Difference of Arrival measurements from multiple sensor stations within the GNSS Environmental Monitoring Systems (GEMS)
Locata positioning technology is a terrestrial based RF ranging technology, that provides highly precise and accurate position solution indoors and outdoors. This demonstration covers the Locata system and Locata positioning system.
Try out the indoor positioning system developed at School of Surveying & SIS, which seamlessly switches between Wi Fi and GPS to provide accurate position both indoors and outdoors.
IGNSSIGNSS20112011 15-17 November 2011
www.ignss.org
19
NOTES

Gatewing
UAS mapping
Topcon IP-S2 3D
Mobile Scanning
Australian Distributor
Position PartnersShaping new dimensions with GNSS technology that helps you
work faster, safer and more accurately than ever before.
Visit our display trailer in International Square to see the latest
in surveying, mapping and machine control systems.
Topcon GNSS
Surveying
Topcon 2D & 3D
Machine Control
ms.
Live product demos
International Square
Open all Day!


















