Generacion de Mdt y Mds Con Software Libre
14
5 Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
-
Upload
jose-antonio -
Category
Documents
-
view
95 -
download
6
Transcript of Generacion de Mdt y Mds Con Software Libre

5 Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre

ResumenLIDAR (por sus siglas en inglés, Light Detection And Ranging Laser) son una clase de sensores remotos ac-tivos, para los cuales los fundamentos teóricos, que permiten su procesamiento digital, no han sido difun-didos ampliamente en Colombia. Estos sensores tie-
nen un emisor láser que envía una serie de impulsos a la superficie terrestre; una vez que estos impulsos cho-can con los objetos, rebotan y regresan al sensor. La información de los impulsos puede ser procesada para construir modelos digitales del terreno (MDT4) y de la superficie sobre el terreno (MDS) para grandes exten-siones con la mejor precisión espacial en el momento. La mayor parte de los programas que han sido usa-dos en Colombia para realizar este procesamiento son comerciales y por tanto son de uso restringido. En este trabajo se desarrollaron dos metodologías para la generación de MDT y MDS con programas de licencia libre; la primera filtra los puntos con base en sus características radiométricas e interpola los MDT y MDS empleando la técnica geoestadística5 Kriging6 La segunda filtra los puntos con base en la locali-zación espacial de los impulsos y genera los MDT y MDS mediante interpolaciones basadas en un algo-ritmo basado en redes irregulares trianguladas (TIN7) sucesivas.
Palabras clavesArcGIS, GVsig, Quick Terrain Reader, Modelo Digital de elevación, programas de licencia libre, Kriging, TIN, interpolación.
1 Investigador en Percepción Remota, Centro de Investigación y Desa-rrollo en Información Geográfica (CIAF), Instituto Geográfico Agus-tín Codazzi (IGAC), Carrera 30 No. 48-51, Bogotá D. C., Colombia.
2 Investigador en Percepción Remota, Centro de Investigación y Desa-rrollo en Información Geográfica (CIAF), Instituto Geográfico Agus-tín Codazzi (IGAC), Carrera 30 No. 48-51, Bogotá D. C., Colombia.
3 Ingeniera Forestal, Master of Science en Ingeniería Forestal Aca-demia Forestal “Kirov” – USSR, specialist in Forestry for Rural De-velopment. International Institute for Aerospace Survey and Earth Sciences (ITC), Holland. Investigadora en Percepción Remota, Cen-tro de Investigación y Desarrollo en Información Geográfica (CIAF), Instituto Geográfico Agustín Codazzi (IGAC), Carrera 30 No. 48-51, Bogotá D. C., Colombia.
4 Modelo Digital de Terreno (MDT): es un MDE del terreno o suelo. 5 Geoestadística: Es la rama de la estadística aplicada que se especializa
en el análisis y la modelación de la variabilidad espacial de una varia-ble. Su objeto de estudio es el análisis y la predicción de fenómenos en espacio y/o tiempo. Aunque el prefijo geo es usualmente asocia-do con geología, la geoestadística tiene sus orígenes en la minería.
6 Kriging: Es un método geoestadístico de interpolación que ha proba-do ser útil y popular en muchos campos. En la actualidad este méto-do de interpolación es ampliamente utilizado para generar modelos de elevación digital (mapas de curvas de nivel). Dicho método provee, a partir de una muestra de puntos, ya sean regular o irregularmente distribuidos, valores estimados de aquellos sitios donde no hay infor-mación, sin sesgo y con una varianza mínima conocida.
7 TIN: La Red de Triángulos Irregulares (TIN, del inglés Triangular Irre-gular Network) es una red construida a partir de un conjunto de puntos espaciales, siendo cada uno de sus puntos un vértice de al menos un triangulo de la red. Los TIN se utilizan para el cálculo de volúmenes, dibujo de curvas de nivel y otras operaciones, por lo que una construcción adecuada permitirá un cálculo más preciso de dichos procesos.
José Camilo Fagua1, Augusto Campo2, Elena Posada3
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre

84 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
Two methodologies for generating Digital Terrain Models (DTM) and Digital Elevation Models (DEM)
using LiDAR data and freeware
AbstractLiDARs (Light Detection And Ranging Laser) are a type of active remote sensors whose processing is not much known in Colombia. These sensors emit million of laser pulses to land, and then they backscatter to sensor. The information of laser pulses can be used to make Digital Terrain Models (DTM) and Digital Elevation Models (DEM) for large land extents with the best spatial resolution at the moment. Most software used to process LiDAR data have expensive licenses; therefore their use is restricted to Colombian users. In this research, we developed two methodologies to generate DTMs and DEMs using freeware: First methodology filters the impulses bases on radiometric characteristics and interpolates the filtered pulses using kriging analysis. Second methodology filters the impulses bases on geometric characteristics and generates DTMs and DEMs using an iterative TIN (triangulated irregular network) algorithm.
Key wordsArcGIS, gvSIG, Quick Terrain Reader, Digital Elevation Model, freeware, Kriging, TIN, interpolation.

85
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
Introducción
LiDAR (siglas en inglés para Light De-tection And Ranging Laser) son una clase de sensores remotos activos que envían millones de impulsos láser a una superficie terrestre que se pretende analizar; una vez estos impulsos chocan con los objetos, la mayor parte de estos regresan al sensor (algunos se pierden) con una energía menor con la que fue-ron emitidos. Cada uno de los impulsos que regresa tiene una ubicación espa-cial tridimensional de alta precisión (en ejes X, Y y Z) y una energía de regreso diferencial, la cual va a variar depen-diendo de la naturaleza del objeto con que chocó (Ackerman, 1999). Toda esta información puede ser procesada para construir modelos digitales del terreno (MDT) y modelos digitales de la superfi-cie sobre el terreno (MDS) para grandes extensiones con la mejor escala espacial en el momento, 10 a 30 cm (Brzank et al., 2008). Los sensores LiDAR pue-den dividirse en dos clases dependiendo del ambiente en el cual se utilicen; los LiDAR topográficos son usados para co-berturas terrestres y operan emitiendo impulsos láser dentro del infrarrojo cer-cano, su utilidad en los espejos de agua es prácticamente nula debido a que el agua absorbe la mayor parte del infra-rrojo (Sithole, 2005; Chen et al., 2011). Los LiDAR batimétricos8 son usados en cuerpos de agua para construir Modelo sDigitales de Profundidad (MDP9) debi-do a que emiten impulsos dentro del verde-azul; estas emisiones son capaces de penetrar el agua (hasta 70 m cuando el agua es clara y 20 m cuando el agua es turbia) permitiendo hacer MDPs de alta precisión (Sithole, 2005).
Los LiDAR también pueden dividirse de acuerdo con la tecnología de emisión de impulsos que emplea el sensor; existen los láser de pulso (pulse lasers o small foo-
tprint) y los láser de onda continua (con-tinuous wave lasers o large footprint waveform), (Ackermann, 1999).
Los láser de pulso envían emisiones en las que cada pulso es después reflejado sobre la superficie de la tierra y regresan al receptor produciendo una pequeña huella de la superficie de la tierra (CFMT, 2007). Los Láser de onda continua tam-bién envían emisiones pero en forma de una lluvia de señal continua y capturan el retorno total, por tal motivo son más precisos y confiables (Chen et al., 2011).
La información que genera un sen-sor LiDAR es almacenada en archivos .LAS, que es un formato público para el intercambio de datos LiDAR entre los generadores de información y los usua-rios. Dichos archivos son una nube de puntos que conserva la información es-pecífica propia de la naturaleza de los sistemas LiDAR y los atributos de los millones de impulsos que conforman la nube de puntos. Dependiendo del sensor, cada impulso tiene los siguien-tes atributos: posición (X, Y y Z), inten-sidad, número de retorno, número de línea de barrido, ángulo del espejo del sensor en el momento de captura (án-gulo de escaneo), tiempo de captura GPS, entre otros.
Para que un archivo .LAS que provie-ne de un LiDAR topográfico (láser de pulso o láser de onda continua) pueda generar MDT y MDS, es necesario reali-zar una separación de los impulsos que provienen del terreno y de los impulsos que provienen de la superficie sobre el terreno. Este proceso es conocido en la literatura especializada como clasifica-ción o filtrado de impulsos y se refiere a la separación de los impulsos depen-diendo de la superficie con que choca-ron después de que fueron emitidos; la clasificación más simple es separar los
8 Batimetría: También conocida como altimetría marina, hace referencia al estudio de la profundidad en 3D de grandes cuerpos de agua (mares, lagos, río, entre otros).
9 Modelo Digital de Profundidad (MDP): es un MDE del terreno que está bajo un cuerpo de agua (mares, lagos, ríos, entre otros).

86 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
impulsos del terreno, y de la superficie sobre el terreno, sin embargo existen clasificaciones más complejas, que se-paran los impulsos por tipos de super-ficie (tipos de vegetación, concreto, barro, suelo desnudo, entre otros). Pos-teriormente, los impulsos (puntos) que corresponden al terreno son interpolados estadísticamente para generar el MDT (un continuo) y los impulsos (puntos) que corresponden a la superficie son interpo-lados estadísticamente para generar el MDS (otro continuo). La base conceptual del procesamiento de archivos .LAS que fue descrito de forma general anterior-mente tiende a ser desconocida por gran parte del público colombiano que está interesado en el tema LiDAR y no tiene acceso a los programas comercia-les de procesamiento de estos archivos. Esto ha causado limitaciones técnicas a la hora de emplear la información LiDAR por parte de muchos usuarios.
En este documento se desarrollaron dos metodologías para generar MDT y MDS a partir de archivos .LAS. Ambos proce-samientos pueden ser aplicados usando programas de licencia libre (como gvSIG) y/o de amplio uso (como ArgGIS); la pri-mera metodología (denominada como Metodología 1) filtra los puntos con base en sus características radiométricas (nú-mero del retorno, intensidad, ángulo de escaneo y altura) e interpola los MDT y MDS empleando la técnica geoestadística Kriging. La segunda metodología (deno-minada como Metodología 2) filtra los puntos con base en la geometría de la localización espacial de los impulsos (atri-butos de posición; X, Y, Z), y genera los
MDT y MDS mediante interpolaciones basadas en algoritmos sucesivos TIN. El objetivo de este documento consiste en explicar en detalle estas dos metodolo-gías de procesamiento de datos LiDAR, desarrolladas por el grupo de percep-ción remota del Centro de Investigación y Desarrollo en Información Geográfica (CIAF), del Instituto Geográfico Agustín Codazzi (IGAC).
1. Materiales y métodos
1.1 Área de estudio y características del sensor LiDAR empleado
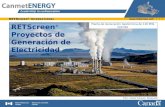
Este estudio se realizó en una zona de la Sabana de Bogotá (Bogotá D. C.), aledaña al río Bogotá (X= 99.025.103; Y=126.586.322), en el occidente de la ciudad y que está cubierta por pastos in-troducidos y cercas vivas formadas por ár-boles (Figura 1). Se analizaron los archivos .LAS generados por un sistema LiDAR to-pográfico aerotransportado ALS 50 Pha-se II de la empresa comercial Merrick en abril del 2007. El sistema integra un al-tímetro láser, una Unidad de Medición Inercial (IMU) Applanix 510 POS/AVIMU y control de vuelo GPS.
Este sistema LiDAR tiene una tasa de pul-sos láser de hasta 150 kHz (150 000 pul-sos por segundo), un tamaño de huella de 150 a 500 mm, una tasa de escaneo de 10 a 100 líneas por segundo y un ángulo de escaneo de 30°. El archivo .LAS analizado está constituido por 789 409 impulsos.
1.2 Metodología 1
Filtrado con base en características radiométricas
La primera metodología usada para se-parar (clasificación) los impulsos que provienen del terreno (los cuales pos-teriormente generarán el MDT) de los
Figura 1. Área de estudio.
Vista generada con el programa Quick
Terrain Reader.

87
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
impulsos que provienen de la superficie sobre el terreno (los cuales posteriormen-te generarán el MDS) se basó en una se-lección diferencial de ambos grupos de impulsos de acuerdo con una selección de filtros sucesivos basados en las ca-racterísticas de los atributos intensidad, número del retorno, ángulo de escaneo y altura. A continuación se explica cada uno de los filtros empleados.
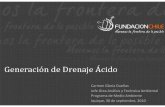
El atributo llamado intensidad va de 0 a 255 (debido a que el sistema LiDAR ALS 50 Phase II genera intensidades escaladas a 8-bit10), se refiere a la can-tidad de energía con que regresa el impulso al sensor (García et al., 2010); dicha energía depende del tipo de co-bertura con la cual el impulso choca. La intensidad tiene los valores más altos cuando los impulsos rebotan en el sue-lo y superficies urbanas duras, mientras es menor cuando los impulsos rebotan en vegetación (Figura 2A) debido a que la clorofila absorbe una fracción grande del infrarrojo (rayo láser) enviado por el sensor, disminuyendo significativamen-te la energía con que regresa el impulso (Lovell et al., 2009).
Con base en estos planteamientos se hicieron dos ensayos de selección, que generaron MDT similares. En el primer ensayo se seleccionaron los impulsos con intensidad de 255 (máximo valor de intensidad). En un segundo ensayo se seleccionaron los puntos dentro del mayor rango de intensidad aplicando la ecuación de rangos de Sturges (1926):
C = (Xmax–Xmin)/M
Donde M = 1 + (3.3 × log N), N = número total de individuos, M = nú-mero de clases de tamaño, C= rango de clases de tamaño, X = longitud de los rangos.
El atributo llamado número del retorno se refiere al orden cronológico con que
A
B
C
Figura 2.Características radiométricas del archivo .LAS empleadas en la metodología 1:2A) Impulsos con intensidad ≤ 30 (tiende a corresponder a vegetación altamente fotosintética), en azul. 2B) Impulsos del último retorno (tiende a corresponder al terreno), en azul. 2C) Impulsos de los primeros retornos 2 a 5 (tiende a corresponder a superficies sobre el terreno), en azul.
10 Escala de 8-bit: hace referencia a la representación en escala de 256 grises de la resolución radiométrica de un sensor remoto.

88 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
llegan los impulsos al sensor después de rebotar en el terreno; al sensor lle-gan primero los impulsos que rebotan primero puesto que tienen menos dis-tancia de viaje, mientras que los impul-sos que llegan después corresponden impulsos que rebotaron después de los primeros retornos y que por tanto tienen más distancia de viaje. El siste-ma LiDAR ALS 50 Phase II suministra hasta cinco retornos; el retorno uno hace referencia a los últimos impulsos que regresaron al sensor, es decir, los que tienden a corresponder al suelo (Figura 2B), mientras que los retornos dos a cinco (Figura 2C) corresponden a impulsos que llegaron primero que los retornos uno, por lo que correspon-derían a objetos sobre el terreno (Hop-kinson y Chasmer, 2009). Por lo tanto, para filtrar los impulsos del terreno se seleccionaron los últimos impulsos que regresaron al sensor.
El atributo llamado ángulo de escaneo es el ángulo geométrico con el que los impulsos láser son enviados contra la superficie; este ángulo se define exacta-mente como el ángulo subtendido por los puntos extremos del escáner láser del sensor (Sithole, 2005). Los LiDAR topográficos, como el ALS 50 Phase II, asumen que los impulsos tienden a re-flejarse de forma especular (es decir, en un ángulo de alrededor de 180°); por lo tanto, los ángulos de escaneo no supe-ran los 20 o 30° (Tamari, et al., 2001). Los cambios en el ángulo de escaneo entre 0 a 30° producen cambios en la disposición espacial de la nube de im-pulsos, pero no cambian fuertemente la precisión para identificar MDT y MDS que tienen los sensores LiDAR (Loha-ni y Singh, 2007). Con base en estos planteamientos, se seleccionaron los impulsos que tuvieron un ángulo de es-caneo positivo (impulsos con ángulos negativos no fueron tenidos en cuenta en el análisis); este filtro disminuyó el número de impulsos sin afectar signi-ficativamente la precisión, y facilitó el procesamiento posterior. Ensayos adi-cionales con los impulsos con ángulos
de escaneo negativos generaron MDT y MDS similares a los generados con los impulsos con ángulos positivos.
El último filtro hace referencia a la al-tura de los impulsos y al conocimien-to de campo que cualquier análisis de percepción debe tener. Por definición, los puntos más bajos provienen del te-rreno (impulsos láser nunca bajan más allá del suelo); en consecuencia, en un lugar relativamente plano, el terreno se-ría cercano a la línea promedio de los puntos más bajos (Sithole, 2005). Para filtrar los puntos del terreno se selec-cionaron impulsos por debajo de 1.5 metros de esta línea promedio para así minimizar la inclusión de impulsos pro-venientes de construcciones humanas.
1.3 Generación de MDT y MDS empleando Kriging
Una vez filtrados los impulsos que corresponden al terreno y a la super-ficie sobre el terreno, es necesario interpolarlos a un MDT y a un MDS, respectivamente. Para esto existen va-rios métodos: 1) interpolaciones usan-do TIN, 2) interpolaciones basadas en ábsidas (IA), y 3) interpolaciones geoestadísticas. TIN e IA realizan gene-ralizaciones que pueden desajustar el modelo resultante (Oliver, 1990); esto ocurre porque estas técnicas seleccio-nan solo los puntos que se ajustan a un algoritmo específico desechando información valiosa (impulsos) y traba-jan con valores redondeados a números enteros, aumentando el error. La técni-ca geoestadística Kriging no presenta estos desajustes y sus resultados serían más precisos y más adecuados para el procesamiento LiDAR; el objetivo de esta técnica consiste en interpolar el valor de una función con base en valo-res conocidos de esa función en puntos aleatorios (nube de impulsos LiDAR). La técnica Kriging no desecha ningún im-pulso filtrado y genera modelos de ele-vación interpolando la variable altura a un raster continuo (MDT y MDS). Para

89
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
aplicar Kriging los datos deber cumplir con el supuesto de estacionariedad11 y se debe seleccionar el modelo de Kriging que más se ajusta a la distribución de los datos (gaussiano, logístico, geométrico, lineal, exponencial, entre otros). Con base en estos planteamientos, se aplicó un Kri-ging ordinario esférico a ambos grupos de impulsos filtrados para generar el MDT y el MDS.
1.4 Metodología 2La segunda metodología usada para filtrar los impulsos se basó en una eli-minación secuencial de impulsos con base en la geometría de su ubicación espacial (atributos X, Y, Z). Para esto, se analizó cada punto de la imagen y se marcaron aquellos con cambios abruptos de altura en vecindarios de 3 x 3 píxeles para luego eliminarlos. Este proceso se realizó en forma cícli-ca hasta que no hubiese más impulsos que eliminar; como resultado se obtie-ne un modelo digital del terreno. Esta metodología se basó en análisis previos desarrollados por Haugerud y Harding (2003) y Sithole (2005). Para realizar este proceso se desarrolló un algoritmo en lenguaje Python; los detalles de este proceso se explican a continuación:
Primero se realizó un TIN inicial a la totalidad de los impulsos de los ar-chivos .LAS; al hacer este TIN se gene-ró un modelo digital de la superficie más externa (MDS) constituido por nodos y líneas que conforman una red de triángulos irregulares que no se traslapan. Posteriormente este TIN se convierte en un raster en que las alturas están representadas por valo-res de intensidad entre 0 y 255 con una escala espacial de 0.27 m (lo cual evidencia la alta definición espacial que generan lo sensores LiDAR, Figu-ra 3A). Las alturas se suavizan apli-cando un algoritmo de promedios a los vecindarios de 3 x 3 píxeles, gene-rando un nuevo raster (Figura 3B), al
que se denominará Raster (Media). A partir de Raster (Media) se hace una nueva nube de puntos, que contie-nen la localización espacial (X, Y y Z) de cada nodo del TIN (Figura 3C).
Posteriormente se resta las alturas de los nodos de este TIN con el valor de altura de Raster (Media) en los lugares corres-pondientes. El resultado es un factor de cambio que permite discriminar los puntos con cambios abruptos de altu-ra en su correspondiente vecindario. La Figura 4 muestra un histograma de los factores de cambio (FC) de la imagen LiDAR analizada; la mayoría de los FC son cercanos a cero y corresponderían a terreno, mientras que otros FC tienen valores alejados de cero (negativa o po-sitivamente); estos puntos tenderían a no ser parte del terreno (Figura 4).
A
Figura 3. Principales características del procesamiento geométrico del archivo .LAS en la metodología 2: 3A) Área del modelo TIN (izquierda) y su representación Raster (derecha).3B) imagen Raster (izquierda) y generalización con algoritmo de promedios (derecha). 3C) Modelo TIN (izquierda) y su respectiva imagen de puntos (derecha).
11 Estacionariedad: Una variable regionalizada es estacionaria si su función de distribución conjunta es invariante respecto a cualquier translación en cualquier sentido o dirección.

90 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
Con base en este planteamiento se eliminaron todos los puntos con un FC > 0.05 y FC< -0.1, es decir, todos los puntos alejados de un FC=0 y se calcula un nuevo TIN. Todo el proceso anteriormente descrito se repite has-ta que no se encuentren más puntos que eliminar y esto sería considerado como el suelo.
1.5 Precisión de las metodologías Para hacer una estimación sobre la pre-cisión de las dos metodologías que se desarrollaron en este trabajo, se com-pararon estadísticamente 40 puntos aleatorios de los MDT (20 puntos) y MDE12 (20 puntos) que generaron am-bas metodologías contra el valor que arroja un programa especializado en
datos LiDAR, Quick Terrain Reader, que ubica con alta precisión espacialmente cada uno de los impulsos de un archivo .LAS. Los datos generados por el progra-ma Quick Terrain Reader fueron usados como ensayo control. La comparación se realizó mediante un análisis de va-rianza no paramétrico (Kruskal-Wallis) y pruebas pareadas no paramétricas (Wilcoxon) realizadas con programa de licencia libre R. No se realizaron com-paraciones contra datos medidos en campo porque los datos LiDAR fueron tomados cuatro años atrás en el mo-mento de este análisis, lo que hace imposible determinar si las variaciones en los MDT y los MDS son producidas por cambios en el paisaje (crecimiento de vegetación, hundimiento del suelo, entre otros) o por error propio de las
Figura 4. Distribución
de frecuencia de factores de
cambio (FC)
12 Modelo Digital de Elevación: Un Modelo Digital de Elevación (MDE) es una estructura numérica de datos que representa la distribución espacial de una variable cuantitativa y continua.

91
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
metodologías. Tampoco se realizaron comparaciones con otras formas de generar MDE debido a que presentan escalas espaciales diferentes (siempre menores) a la escala espacial que se ob-tiene con LiDAR.
2. Resultados y discusión
No se encontraron diferencias signifi-cativas entre los valores de altura de los MDT generados por ambas metodologías (Figura 5) y los valores generados con el programa Quick Terrain Reader o ensayo control (Figura 1), (KW Test: X2 = 0.4; P=0.818); tampoco se encontraron di-ferencias significativas entre los valores absolutos de la diferencia entre los MDT y el control (Wil Test: T=91; Z= 0.16; P=0.87). Esto indica que ambas meto-
Figura 5. MDT y MDS generados con las metodologías 1 y 2
dologías tienen un error inferior al 5% en la generación de MDT evidenciando que son aproximaciones similares a la que generan programas especializados en datos LiDAR. Sin embargo, cuando se analizó la desviación estándar de los valores absolutos de la diferencia entre los MDT y el control, se encontró que la Metodología 1 tiene una desviación es-tándar mucho menor (±0.7) que la de la Metodología 2 (±22.29) y evidencia que la Metodología 1 puede ser más precisa en la generación de MDT (Fi-gura 6A); sin embargo, para hacer una conclusión más certera es necesario te-ner datos de campo.
No se encontraron grandes diferencias entre los valores de altura de los MDS (Figura 5) generados por ambas meto-dologías y los valores generados con el programa Quick Terrain Reader o ensa-

92 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
que la Metodología 2 puede ser más precisa en la generación de MDS (Fi-gura 6B); sin embargo, para hacer una conclusión más certera es necesario te-ner datos de campo. Los resultados ex-puestos en este trabajo evidencian que ambas metodologías tienen fortalezas y debilidades; la Metodología 1 es más precisa en la generación de MDT, mien-tras que la 2 es más precisa generan-do MDS. Esto muestra que ambas son complementarias y que lo ideal sería una combinación de la generación del MDT de la Metodología 1 y del MDS de la 2.
La mejor precisión de la Metodología 1 en la generación de MDT sucede por la gran cantidad de impulsos prove-nientes del suelo que tuvieron los ar-chivos .LAS analizados, que aumenta la precisión del método de interpola-ción empleado, el Kriging (Biau et al., 1997). Asimismo, la baja cantidad de impulsos provenientes de las superfi-cies aisladas (árboles y arbustos aisla-dos, hierba, entre otros) disminuyó la precisión de la interpolación Kriging cuando generó el MDS. La interpola-ción empleada en la Metodología 2 (TIN9 sucesivos) registró una precisión menor al generar MDT porque la gene-ración de triángulos irregulares se basa en los valores promedio de algunos de los impulsos, desechando información (impulsos) cuando existen muchos da-tos como los que se registraron para el terreno. Esta generalización dis-minuye la capacidad para evidenciar detalles como pequeñas depresiones del terreno. En contraste, los datos de esta investigación muestran que TIN9 sucesivos son precisos para interpolar MDS de objetos aislados porque estos generan un número no tan alto de im-pulsos en el archivo .LAS, que resulta ser una característica adecuada para la generalización TIN.
Las metodologías desarrolladas en esta investigación pueden considerarse como aproximaciones de alta presión
yo control (Figura 1), (KW Test: X2 = 2.8; P=0.24); sin embargo, se encon-traron diferencias significativas entre los valores absolutos de la diferencia entre los MDS y el control (Wil Test: T=36; Z= 2.57; P=0.009). Esto indica que la Metodología 1 puede tener un error superior al 5% en la generación de MDS, mientras que la Metodología 2 tiene un error menor al 5%. Además, se encontró que las desviaciones están-dar de los valores absolutos de la di-ferencia entre los MDS generados con Metodología 1 y el control (±6.59) son significativamente mayores a los MDS generados con Metodología 2 y el con-trol (±1.8). Estos resultados evidencian
A
B
Figura 6. Resultados de
análisis estadísticos para determinar
la precisión de las metodologías para
generar MDT (6A) y MDS (6B)

93
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
espacial para la generación de MDT y MDS a partir de datos LiDAR en sitios relativamente planos. Sin embargo, estas no han sido probadas en sitios montañosos, lo que constituye un ob-jetivo de investigación por desarrollar.
Otro aspecto no evaluado fue la posibi-lidad de filtrar los impulsos de acuerdo con tipos de cobertura (vegetación, con-creto, suelo desnudo, entre otros). En la literatura se citan varios artículos que generan modelos digitales de elevación para coberturas específicas fusionando los datos LiDAR con otro sensores remo-tos, imágenes ópticas principalmente (Dash et al., 2004; Bélanda et al., 2011; Lovell et al., 2011). Esto constituye otro propósito metodológico de investiga-ción para ser evaluado.
En el mercado de sensores remotos existen varios programas comerciales de baja difusión para el procesamiento de datos LiDAR, pero su uso en Colom-bia es limitado debido a las restriccio-nes comerciales; Además, la precisión de los productos que generan es desco-nocida. En este trabajo se muestra que la precisión de los productos que se ge-neran de archivos .LAS varía dependien-do de las características de terreno y de las metodologías que se empleen para el filtrado e interpolación de las nubes de impulsos LiDAR; esto evidencia que es necesario tener un control sobre los errores que generan las distintas me-todologías que emplean en el proce-samiento LiDAR (métodos de filtrado e interpolación).
Finalmente, hay que indicar que las me-todologías y procesos desarrollados en este trabajo son un punto de partida para que el público colombiano intere-sado y que carece de programas comer-ciales especializados en procesamiento de datos LiDAR tenga acceso a parte de las bondades que esta tecnología pro-porciona y pueda así desarrollar nuevos y mejores procesamientos con progra-mas de licencia libre o de alta difusión.
Conclusiones
Como una alternativa a los progra-mas comerciales específicos en proce-samiento de datos LiDAR, se pueden usar programas de licencia libre para generar MDTs y MDEs con errores in-feriores al 5% a partir de archivos .LAS en terrenos relativamente planos, no obstante un procesamiento de este tipo depende ampliamente del cono-cimiento conceptual que se tenga de la herramienta LiDAR (características de la información que arroja el sensor, topología y geometría de los archivos .LAS, filtrado de impulsos e interpola-ción espacial) y de las características del terreno. Las metodologías expues-tas en este trabajo son una base para desarrollar nuevos procesamientos de datos LiDAR en Colombia empleando programas de licencia libre o de alta difusión.

94 Tecnologías geoespaciales al servicio del desarrollo territorial.Análisis Geográficos Nº 49
Referencias bibliográficas
Ackermann F. 1999. Airborne laser scanning – present status and future expectations. Journal of Photogrammetry and Remote Sensing 54:64-67.
Béland M, Widlowski JL, Fourniera RA, Côtéa JF & MM Verstraeteb. 2011. Estimating leaf area distribution in savanna trees from terrestrial LiDAR measurements. Agricultural and Forest Meteorology 151: 1252-1266.
Biau, G, Zorita E, von Storch H & H. Wackernagel. 1997. Estimation of precipitation by kriging in EOF space. GKSS, 97, E45.
Brzank A, Heipke C, Goepfert J & U. Soergel. 2008. Aspects of generating precise digital terrain models in the Wadden Sea from lidar–water classification and structure line extraction. ISPRS Journal of Photogrammetry & Remote Sensing 63: 510-528.
Committee on Floodplain Mapping Technologies, National Research Council (CFMT). 2007. Ele-vation data for floodplain mapping. The National Academies Press, Washington, D.C., EU. Pp. 168.
Chen W, Cousin J, Poullet E, Burie J, Boucher D, Gao X, Sigrist MW & FK Tittel. 2011. Conti-nuous-wave mid-infrared laser sources based on difference frequency genera-tion. Comptes Rendus Physique (in press).
Dash J, Steinle E, Singh RP & HP Bahr. 2004. Automatic building extraction from laser scan-ning data: an input tool for disaster management. Advances in Space Research 33:317–322.
García M, Riaño D, & Chuvieco E, & F M Danson. (2010). Estimating biomass carbon stocks for a Mediterranean forest in central Spain using LiDAR height and intensity data. Remote Sensing of Environment 114:816–830.
Henao RG. Introducción a la Geoestadística. Universidad Nacional de Colombia. Bogotá D. C., Colombia. Pp. 94.
Haugerud R. A. & D. J. Harding. (2003). Some algorithms for virtual deforestation (vdf) of lidar topographic survey data. Geological Survey and University of Washington, Seattle Washington, EU. Pp. 8.
Hopkinson C. & L. Chasmer. (2009). Testing LiDAR models of fractional cover across multiple forest ecozones. Remote Sensing of Environment 113: 275–288.

95
Desarrollo de dos metodologías para la generación de modelos digitales de terreno (MDT) y superficie (MDS) empleando datos LiDAR y programas de licencia libre
Lohani B. & R Singh. 2007. Effect of data density, scan angle, and flying height on the accuracy of building extraction using LiDAR data. Geocarto International 16 (44): 1-14.
Lovell J.L., Jupp D.L.B, Newnhamc G.J., & D.S. Culvenor.(2011). Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS Journal of Photogrammetry and Remote Sensing 66:46-55.
Sithole G. 2005. Segmentation and Classification of Airborne Laser Scanner Data. Doctoral The-sis, Nederlandse Commissie voor Geodesie (NCG), the Royal Netherlands Acade-my of Arts and Sciences. Amsterdam, Nederland. Pp. 185.
Sturges, H. A. (1926). The choice of a class interval. Journal of the American Statistical Associa-tion 21, 65–66.
Tamari S, Mory J & V. Guerrero-Meza. (2011). Testing a near-infrared Lidar mounted with a large incidence angle to monitor the water level of turbid reservoirs. ISPRS Journal of Photogrammetry and Remote Sensing. (in press).