Feedback Systems for Synchrotron · 2019. 9. 20. · ESTABLISHED 1962 Feedback Systems for...
26
ESTABLISHED 1962 Feedback Systems for Synchrotron Light Sources J. Fox Stanford Linear Accelerator Center Mastering Beam Instabilities in Synchrotron Light Sources ESRF Workshop March 2000 Work supported by DOE Contract DE-AC03- 76SF00515
Transcript of Feedback Systems for Synchrotron · 2019. 9. 20. · ESTABLISHED 1962 Feedback Systems for...

ESTABLISHED1962
Feedback Systems for SynchrotronLight Sources
J. Fox
Stanford Linear Accelerator Center
Mastering Beam Instabilities in Synchrotron LightSources
ESRF Workshop March 2000
Work supported by DOE Contract DE-AC03-76SF00515

ESTABLISHED1962
Y
Talk Outline
I Instabilities, and Feedback principles
Feedback requirements
II. Technical Challenges
Pickups, Kickers
Signal processing options
Gain Limits, Noise effects
III. Example Implementations
ALS, PEP-II/ et al, CESR, KEK-B
IV. Evaluating System performance and Margins
Examples from PEP-II, DAFNE, ALS and BESS
III. Summary

ESTABLISHED1962
r?
Feedback Principles - GeneralOverview
Principle of Operation
Longitudinal - measure - correct E
Transverse - measure ( , ) - kick in ,
Technical issues
Loop Stability? Bandwidth?
Pickup, Kicker technologies? Required output powe
Processing filter? DC removal? Saturation effects?
Noise? Diagnostics ( system and beam)?
δφ
δX δY X' Y'
sensornoise
processnoise
zw
u Controller
G
Hy
v
Beam

ESTABLISHED1962
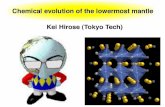
Harmonic Oscillators, Revisited
Equation of motion
where
Damping term proportional to
x γ x ω02
+ + f t( )=
ω0km----=
γ x
0 5 10 15 2010
−1
100
101
Frequency, kHz
Ma
gn
itud
e
0 5 10 15 20−200
−150
−100
−50
0
Frequency, kHz
Ph
ase
, d
eg
ree
s
0 0.2 0.4 0.6 0.8 1 1.2 1.4−6
−4
−2
0
2
4
6x 10
4
Time, ms
Am
plit
ud
e
Impulse response

ESTABLISHED1962
e
Normal Modes, Revisited
N coupled Oscillators,N Normal Modes
Driving term provides coupling
Broadband ( all-mode) vs. Narrowband Feedback
Time Domain vs. Frequency Domain formalism
• Pickup, Kicker signals the same
• Bandwidth Constraints identical
An all-mode frequency domain system ( with uniformgain) is formally equivalent to a bunch-by-bunch timdomain system - identical transfer functions

ESTABLISHED1962
rs
Technical Challenges
Short interbunch Interval
• KEK-B, ALS, BESSY, PLS- 2 ns, DAFNE 2.7 ns,PEP-II 4.2 ns
• requires wideband pickups, kickers
• sets required processing bandwidths
• Resolution - oscillation rms 0.6 picosecond
Many Bunches ( many unstable modes)
• KEK-B 5120, PEP-II 1746
• Need to compactly implement bunch by bunch filte
Ratio of Frev to Fosc
• Nyquist limit Fosc< 1/2 Frev
• Betatron Oscillations grossly undersampled
• Synchrotron oscillations typically oversampled
• low synchrotron frequency sets scale of requiredfilter memory
Delay-bandwidth product - implementation choices

ESTABLISHED1962
vrls
Filter Implementation Options
Terminology
• Time domain - bandpass bunch by bunch filters
• frequency domain - modal selection, notch at FreSampling process suggests discrete time filter ( filtegenerates correct output phase, limits noise, controsaturation)
General form of IIR filter ( infinite impulse response)
General form ofFIR filter ( finite impulse response)
Analog Approach -
• N parallel mode by mode filters - or -
• FIR/IIR from analog delay ( electrical, opticalacoustic)
• Taps ( multiplication of coefficients), SummationDigital approach
A/D at Fbunch, DSP FIR/IIR filter, D/A at Fbunch
yn akyn k– bkxn k–k 0=
M
∑+
k 1=
N
∑=
yn bkxn k–k 0=
M
∑=

ESTABLISHED1962
Baseband transfer function
Baseband Filter transfer function
( each bunch sees this control filter)
Maximum gain at Synchrotron frequency
zero DC gain
Phase tailored for proper feedback phase and loopstability

ESTABLISHED1962
RF transfer function
Total RF transfer function
(superposition of all individual bunch filters)
Zero gain at revolution harmonics
maximum gains at n*Frev +/- synchrotron frequency

ESTABLISHED1962
)
IR
Existing/Example Feedback Systems
DESY - Kohaupt et al. ( transverse and longitudinal
• 96 ns bunch spacing - 70 bunches - 3 tap digital F
UVSOR ( Japan) - Kasuga et al. (longitudinal)
• 16 bunches - 16 analog filters with multiplexing
NSLS - Galayda, et al ( transverse)
• 2 tap analog FIR (“correlator filter”)
CESR - Billing, et al ( transverse and longitudinal)
• 16 ns bunch spacing, digital FIR filter
ALS - Barry, et al ( transverse)
• 2 ns bunch spacing -2 tap analog FIR filter
• quadrature pickups, sum for phase shift
PEP-II/ALS/DAFNE - Fox, et al (longitudinal)
• 2 - 4 ns bunch spacing, 120 - 1746 bunches
• general purpose DSP processing
KEK-B - Tobiyama, et al (transverse, longitudinal)
• 2 ns spacing, 5120 bunches, 2 tap digital FIR


ESTABLISHED1962
DESY


ESTABLISHED1962
ALS Transverse FeedbackImplementation
From W. Barry
Analog 2-tap FIR filter for DC orbit suppression
Quadrature processing via 2 pick-ups

ESTABLISHED1962
)
PEP-II/DAFNE/ALS
Phase Detection at 3*RF
General-Purpose DSP farm ( 40 - 80 processors)
QPSK-AM output modulator ( 9/4, 11/4 or 13/4 * RF
Kicker Structure
Comb Generator
Timing & Control
Beam Bunches
BPM
ExternalDriveInput
BunchError
Farm of DigitalSignal
Processors
QPSKModulator
Kicker Oscillator1.125 GHz
Phase-locked to Ring
Master OscillatorPhase-locked
at 6*RF of Cavity
Poweramp
Ho
ld-B
uff
er
D/A
A/D
Do
wn
sam
ple
r
DSP
X Low-pass Filter
10-96 8146A1
+

ESTABLISHED1962
Six Bunches and associated longitudinalkicks
2 ns bunch spacing
Baseband risetime 320 ps
(2ns/div)
QPSK-AM modulation


ESTABLISHED1962
,
.
0
Kicker Implementations
Transverse-
Essentially all striplines. Length limited by bunchspacing. Operation at baseband ( except for KEK-Busing two sets of kickers/amplifiers)
Cornell ( CESR) has clever short-circuited design tokick counter-propagating beams. Also clever duty-cycle modulated kicker driver, as apposed to linearamplifier drive
Amplifiers - baseband ( 100kHz - 230 MHz)
Longitudinal - Several designs
Ceramic Gap ( UVSOR) - modest shunt impedance
Loaded (damped) Cavity - Designed by LNF-INFN,used by DAFNE, BESSY ( KEK-B?). Easy to cool.Needs circulator. Reasonable shunt impedance
Drift-tube structures - designed by LBL BeamElectrodynamics Group, used by ALS, PLS, PEP-IIUseful in-band directivity. Cooling issues for amperecurrents
Operating in 1 - 1.5 GHz band. GaAs power amps ( 20- 500 W), also TWT power stages ( 200 W)

ESTABLISHED1962
Beam Quality (ALS)

ESTABLISHED1962
Undulator Spectrum
Thanks to Tony Warwick ( ALS) for UndulatorSpectrum
680 685 690 695 700 705 710 715 7200
1
2
3
4
5
6x 10
−9 Undulator Spectrum − Feedback on (−),off(− −)
Energy ( eV)
No
rma
lise
d O
ptic
al I
nte
nsi
ty (
arb
. u
nits
)
ALS 5th Harmonic Undulator Spectrum 108 mA 84 bunch pattern

ESTABLISHED1962
ng
ts
w-ing
)
,s
g
nd
Evolution of DSP-based Diagnostics
Original motivation - stabilize coupled-bunch instabilities
• Engineering-level system checks• Identification of unstable eigenmodes, growth/dampi
rates at full design currents• Beam Pseudospectra, Grow/Damp Modal Transien
Second-tier diagnostics
• Predictions of high-current unstable behavior from locurrent stable machine measurements (growth/damprates at design current estimated from low-currentcommissioning data)
• beam instrumentation - bunch by bunch currentmonitor, tune monitor, bunch power spectrum (noisemonitor
• Synchrotron tune vs. bunch number - gap transientstune spread, Landau damping - instability thresholdfor various configurations
• Longitudinal impedance vs. frequency from bunchsynchronous phases
• Eigenstructures of uneven fills, phase space trackin• Transverse Motion via DSP Data Recorder/ControlTechniques used at ALS, SPEAR, DAFNE, PEP-II, PLS aBESSY

ESTABLISHED1962
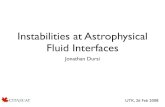
PLS Grow/Damp
010
20200
400
0
0.5
1
1.5
2
Time (ms)
a) Osc. Envelopes in Time Domain
Bunch No.
deg@
RF
010
20
0
200
400
0
0.2
0.4
Time (ms)
b) Evolution of Modes
Mode No.
deg@
RF
0
5
0
200
400
0
0.1
0.2
0.3
Time (ms)
c) Exp. Fit to Modes (pre−brkpt)
Mode No.
deg@
RF
0 100 200 300 4000
0.02
0.04
0.06
0.08
0.1
0.12
Mode No.
Rat
e (
1/m
s) d) Growth Rates (pre−brkpt)
18 20 22 24 26
0
200
400
0
0.1
0.2
0.3
Time (ms)
e) Exp. Fit to Modes (post−brkpt)
Mode No.
deg@
RF
0 100 200 300 400
−0.7
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
0
Mode No.
Rat
e (
1/m
s)
f) Growth Rates (post−brkpt)
PLS:dec1599/1237: Io= 150mA, Dsamp= 15, ShifGain= 5, Nbun= 460,Gain1= −1, Gain2= 0, Phase1= 30, Phase2= 30, Brkpt= 1150, Calib= 11.02.

ESTABLISHED1962
ewsntw
d-
d to
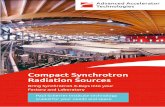
Harmonic Cavities at the ALS andLongitudinal Control
The addition of 5 3*RF passive cavities has added nHOM instabilities to the ALS, increasing growth ratefor the passively-tuned state. Additionally, the coheretune shifts from reactive impedances and current norequire a much wider control filter than the FIR banpass filter in use for five years.
Flexibility of the programmable DSP system allowedthis new control technique to be implemented as asoftware change. Transient-domain diagnostics useunderstand new operating requirements
0 5 10 15 200
10
20
30
40
50
Frequency, kHz
Mag
nitu
de
Frequency responses of FIR (red) and IIR (green) filters
0 5 10 15 20−400
−300
−200
−100
0
100
Frequency, kHz
Pha
se, d
egre
es

ESTABLISHED1962
f
off
Movie Synopsis
SPEAR -
• 70 bunch even fill, 30 mA
• FB stabilized mode (-3) grows when FB turned of
• 24 ms total sequenceDAFNE-
• 30 bunch even fill, 100 mA
• Mode zero unstable, beam lost in machine
• 650 microsecond total sequenceALS-
• 320 bunch fill (h=328), 95 mA
• FB stabilized mode (233) grows when FB turned
• 7 ms total sequenceLER PEP-II Phase Space tracking
• inner circle “modes “785 - 795, outer 805-815HER Bunch train (vertical motion) 22 ms
• 150 buckets, 4.2 ns spacing
• FB stabilized train grows when FB turned off

ESTABLISHED1962
.
ain
tial
Summary
Multi-bunch instability control-
Problem can be addressed withimpedance control,carefulcavity tuning, deliberatemodulation of fillingpatterns, and/or active feedback
• Design choices - all-mode vs. selected modes
• difference between damped HOM structures ( e.gbands of unstable modes) and narrowband HOMstructures
• Technology choices - processing approaches
• Issues of injected noise, required output power
Recent developments -
Longitudinal control of machines with harmoniccavities
• ALS experience - new IIR control techniques
Strategy of common hardware systems, softwareconfigured systems. Development of transient-dommachine diagnostics
Rapidly developing DSP technology suggests potenfuture applications ( Elettra/SLS work in progress)

ESTABLISHED1962
lesJ.mC),D.
IIrlett.
C.D.tt
..r
r-II,od
act
Acknowledgments
The PEP-II digital processing architecture and moduwere skillfully designed and developed by G. Oxoby,Olsen, J. Hoeflich and B. Ross (SLAC) - Systesoftware was designed and coded by R. Claus (SLAI. Linscott (Stanford), K. Krauter, S. Prabhakar andTeytelman (SLAC)
The wideband longitudinal kicker for ALS and PEP-was designed and developed by F. Voelker and J. Co(LBL). The kicker for DAFNE was designed by RBoni, A. Gallo, F. Marcellini, et.al.
Thanks to D. Andersen, P. Corredoura, M. Minty,Limborg, S. Prabhakar, W. Ross, J. Sebek,Teytelman, R. Tighe, U. Wienands (SLAC), I. Linsco(Stanford) , M. Tobiyama, E. Kikutani (KEK), ADrago, M. Serio ( LNF-INFN) and W. Barry, J. Byrd, JCorlett, G. Lambertson and M. Zisman (LBL) fonumerous discussions, advice and contributions.
Special thanks to Boni Cordova-Grimaldi (SLAC) fofabrication expertise and to the ALS, SPEAR, PEPand DAFNE operations groups for their consistent gohumor and help.
Work supported by U.S. Department of Energy contrDE-AC03-76SF0051