
Overview of Some Feedback & Control Systems at Synchrotron ...
38
1/33 PCAPAC 2016 Overview of some Feedback- & Control systems in Synchrotron SOLEIL Christer Engblom on behalf of Accelerator & Engineering Division Christer Engblom on behalf of Accelerator & Engineering Division Overview of some Feedback- & Control Systems at Synchrotron SOLEIL Overview of some Feedback- & Control Systems at Synchrotron SOLEIL
Transcript of Overview of Some Feedback & Control Systems at Synchrotron ...

1/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Christer Engblom on behalf of Accelerator & Engineering DivisionChrister Engblom on behalf of Accelerator & Engineering Division
Overview of some Feedback- & Control Systems at Synchrotron SOLEIL
Overview of some Feedback- & Control Systems at Synchrotron SOLEIL

2/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL Feedback/Feedforward Systems
Storage Ring Beamline Beamline Endstation
Conclusion
Overview of some Feedback- & Control Systems at Synchrotron SOLEIL
Overview of some Feedback- & Control Systems at Synchrotron SOLEIL

3/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

4/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
ContextContext
Beam
Detector
Sample
Detector
To increase electron beam stability and
photon energy accuracy
To increase endstationstability
More accurate towards nanopositioning
More stablepermanent static regulation in spite of disturbances
Control & Acquisition Challenges To synchronize
detectors with optics that select photon
energy to acquire only useful data
To perform fastest continuous acquisition to
save time

5/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
ContextContext
Nanoprobe Endstation Challenges– Provide 2D- & 3D tomography scans with nanometric resolution &
mm- range, while maintaining stable photon beam flux and position– Possibility of fast continuous scans with low dynamic errors.
Stability is required for all systems from the electron beam to the endstation.– Machine feedback/feedforward systems (GOFB, RF feedback...)– Beamline feedback systems (FastAtt...)

6/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion
7/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
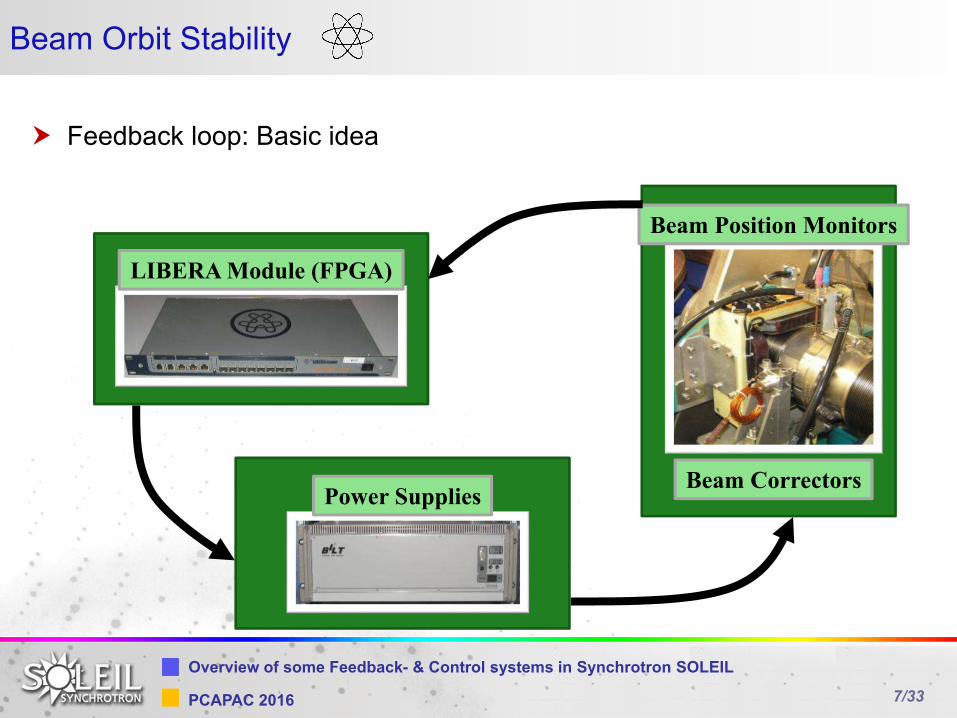
Beam Orbit StabilityBeam Orbit Stability
Beam Position Monitors
Beam CorrectorsPower Supplies
LIBERA Module (FPGA)
Feedback loop: Basic idea

8/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Beam Orbit StabilityBeam Orbit Stability
MIMO- Feedback System– BPM – Measure Orbit Errors– Correctors – Correct Orbit
Errors
Singular Value Decomposition

9/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Beam Orbit StabilityBeam Orbit Stability
Global Orbit Feedback (GOFB)– Fast Orbit Feedback (FOFB)– Slow Orbit Feedback (SOFB)
Status– SOFB/FOFB approach– DC250Hz control– Implemented XBPMs into the
feedback photon beam stability improved by factor of 1.3-3
10/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

11/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Storage Ring RF SystemsStorage Ring RF Systems
Power output of 600 kW RF Voltage of 3-4 MV @ 352 Mhz 2 Cryomodules in SR, each holding a 2 superconducting RF cavities Each RF cavity is powered by 180 kW solidstate amplifier.
Cryomodules in Storage Ring180 kW solidstate amplifier

12/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
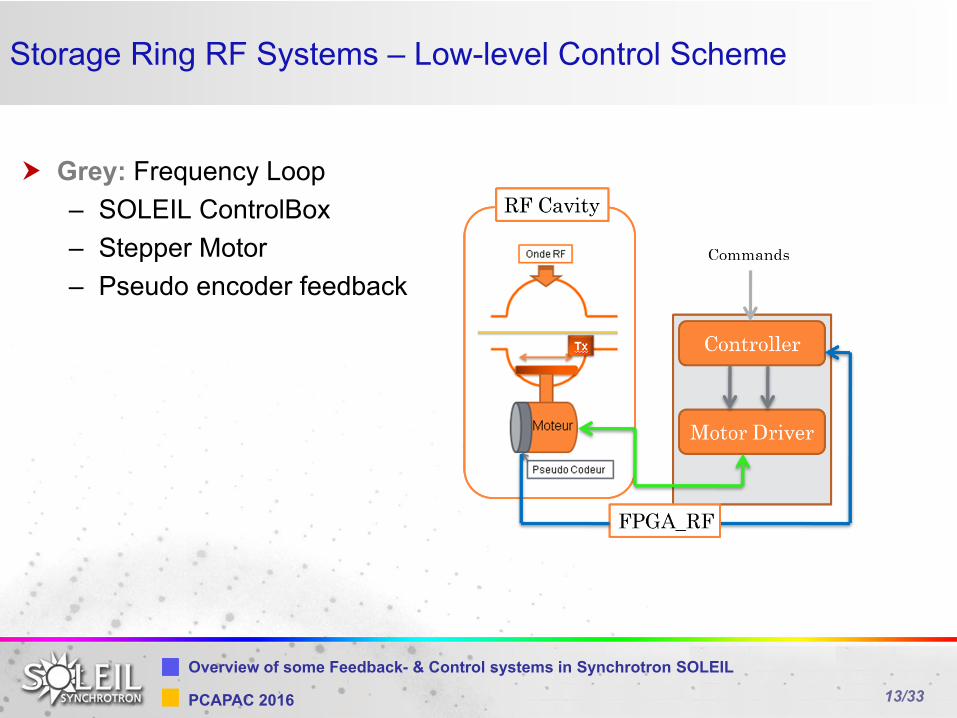
Orange: Amplitude Loop Green: Phase Loop Red: Direct RF Feedback Grey: Frequency Loop
The amplitude an phase loops are running analog LLRF control
Prototype digital FPGA-based control tested in 2009 for the orange, green, and red loops
Storage Ring RF Systems – Low-level Control SchemeStorage Ring RF Systems – Low-level Control Scheme
13/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Grey: Frequency Loop– SOLEIL ControlBox– Stepper Motor– Pseudo encoder feedback
Storage Ring RF Systems – Low-level Control SchemeStorage Ring RF Systems – Low-level Control Scheme

14/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices– Beamline
• Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

15/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Trajectory Compensation in Electromagnetic Insertion DevicesTrajectory Compensation in Electromagnetic Insertion Devices
Use of Insertion Devices Close Orbit Distortions (COD) Trajectory Correctors @ entry and exits of ID
– Electromagnetic field variation in horizontal- and vertical orientation
Previous control systems used high- level software via Profibus– Major drawback: difficult to synchronize COD to corrector rate

16/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Low- Level microcontroller– SPICONTROLLER with SPIDAC
Feedforward Compensation Look-up table– Generate corrections analog signals
in function of main coil current
Trajectory Compensation in Electromagnetic Insertion DevicesTrajectory Compensation in Electromagnetic Insertion Devices

17/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
SPICONTROLLER archititecture: COD reduced from 25um 8um (2012)
Trajectory Compensation in Electromagnetic Insertion DevicesTrajectory Compensation in Electromagnetic Insertion Devices

18/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

19/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Fast Attenuation DeviceFast Attenuation Device
SIXS beamline (Pneumatic & piezo actuators), DIFFABS (pneumatic)
Useful for high photon energy scans to avoid detector damage and saturation
Photon flux regulation(3rd gen. Synchrotron 1014 photons/s)– Photon flux < Detector damage
threshold (~109 photons/s)– Photon flux within optimal detector
rangePneumatic FastAtt setup on SIXS
beamline

20/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
CompactCPI board– Measures mean photon flux
• Point detector• 2D XPAD sensor + XPAD intensity
analyser– Multi- actuator control via binary logic
• Moves filters in/out of photon beam
Fast Attenuation DeviceFast Attenuation Device
Detector Damage Range

21/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

22/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe ProjectNanoprobe Project
4- year collaboration project between Synchrotron SOLEIL & MAX IV– Scheduled to finish in 2016
Produce Nanoprobe endstation prototypes capable of 2D- & 3D tomography on the nanometeric scale with mm- range– Beam focusing stages
• Fresnel Zone Plates: 5 DOF/lens• Central Stop: 3 DOF• Order Sorting Aperture: 3 DOF
– Sample Stage: 4 DOF

23/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe ProjectNanoprobe Project
4- year collaboration project between Synchrotron SOLEIL & MAX IV– Scheduled to finish in 2016
Produce Nanoprobe endstation prototypes capable of 2D- & 3D tomography on the nanometeric scale with mm- range– Beam focusing stages
• Fresnel Zone Plates: 5 DOF/lens• Central Stop: 3 DOF• Order Sorting Aperture: 3 DOF
– Sample Stage: 4 DOF

24/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe ProjectNanoprobe Project
Fresnel Zone Plates– DOF: (X,S,Z,Rx,Rz)– Static positioning stability (8h)– Nanometric- precision– Millimeter- range
Sample Stage– DOF: (X,S,Z,Rz)– Static positioning stability (8h)– Dynamic Positioning stability (Flyscan)– Nanometric- precision– Millimeter- range

25/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Passive environment stability– Temperature: 1mK difference ~1nm difference– Vibration
Stage Stacking when possible– Modular design
• Simple construction & parts interchangeable• Individually characterize each stage before mounting
– More suitable than parallel structure considering range of motion– Disadvantage: Errors are additive!
Sample stage - Use ”small” Rz rotation stage– Light weight less demanding on lower stages– Disadvantage: Smaller rotation stage higher degree of
eccentricity + wobble
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
Passive Stability
Active Stability
Nanometer

26/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
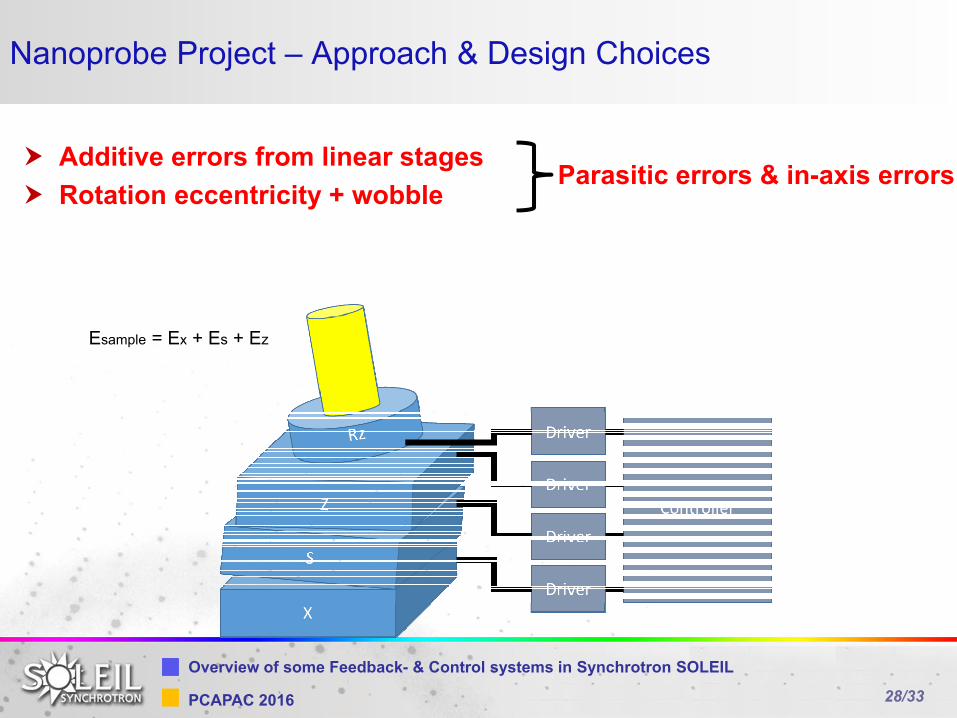
Ex: Sample Stage (X,S,Z,Rz) Cylindrical sample holder (yellow)

27/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
Ex: Sample Stage (X,S,Z,Rz) Cylindrical sample holder (yellow)
28/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
Additive errors from linear stages Rotation eccentricity + wobble
Esample = Ex + Es + Ez
Parasitic errors & in-axis errors

29/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
Additive errors from linear stages Rotation eccentricity + wobble Feedforward Compensation – Reduce repeatable errors (Data from
stage characterization)

30/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Approach & Design ChoicesNanoprobe Project – Approach & Design Choices
Additive errors from linear stages Rotation eccentricity + wobble Feedforward Compensation – Reduce repeatable errors (Data from
stage characterization) Feedback from Interferometer – reduce all errors

31/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Control in Sample Stage/FZP StageNanoprobe Project – Control in Sample Stage/FZP Stage
Sample Stage Delta Tau Controller (with
REVOLUTION Project)– Position Compensation
(Feedforward 1D, 2D, 3D)– Interferometer Feedback– Virtual Axes (Kinematic
Equations)
FZP Stage Galil Controller (SOLEIL ControlBox)
– Control via kinematic equations in python scripts and TANGO

32/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Sample Stage Scan ResultsNanoprobe Project – Sample Stage Scan Results
Trajectory errors during 1x1 um XZ-scan: flyscan on X, stepscan on Z.
Encoder feedback, no feedforward, no interferometer feedback

33/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Sample Stage Scan ResultsNanoprobe Project – Sample Stage Scan Results
Trajectory errors during 1x1 um XZ-scan: flyscan on X, stepscan on Z.
Encoder feedback, X- feedforward, no interferometer feedback
34/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
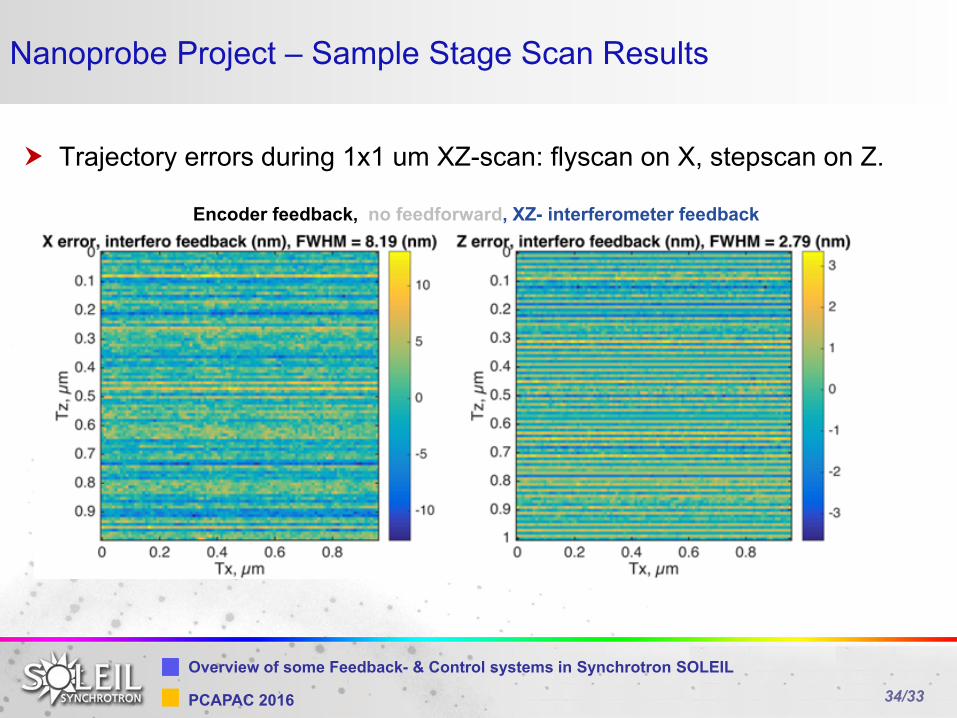
Nanoprobe Project – Sample Stage Scan ResultsNanoprobe Project – Sample Stage Scan Results
Trajectory errors during 1x1 um XZ-scan: flyscan on X, stepscan on Z.
Encoder feedback, no feedforward, XZ- interferometer feedback

35/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Nanoprobe Project – Sample Stage: Rotating...Nanoprobe Project – Sample Stage: Rotating...
XSZ- scans during full 360 degree rotations (30 rot)
Feedforward compensation– Performed and been able to
reduce repeatable position errors
Interferometer feedback– Performed and been able to
reduce position errors (repeatable+non-repeatible)
36/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
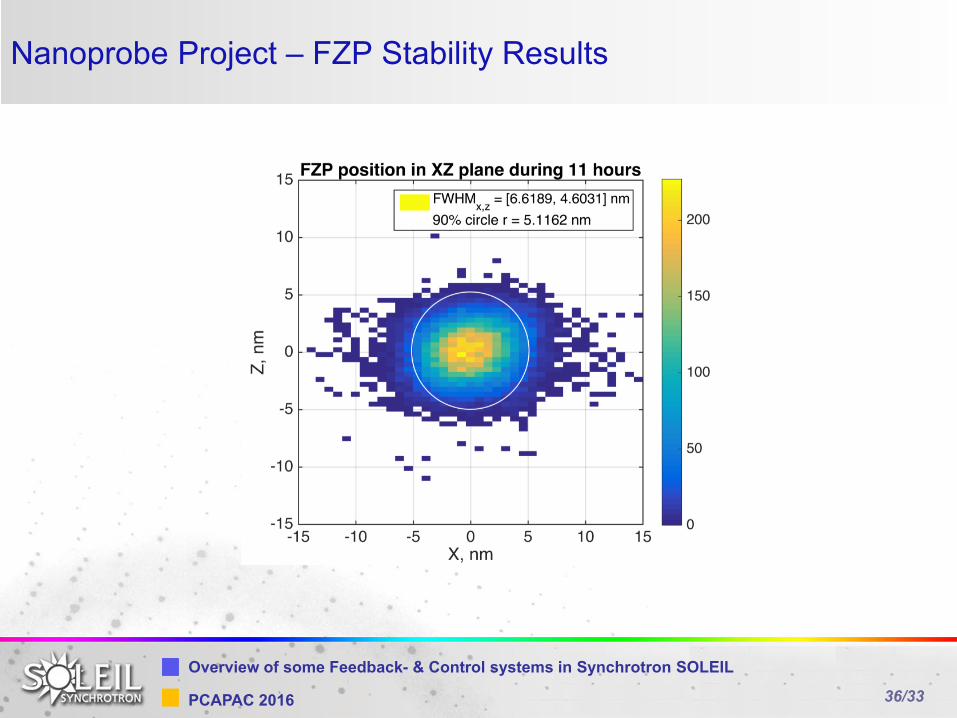
Nanoprobe Project – FZP Stability ResultsNanoprobe Project – FZP Stability Results

37/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Context SOLEIL FB/FFW Systems
– Storage Ring• Beam Orbit Stability System• RF Systems• Trajectory Compensation in
Insertion Devices
– Beamline • Fast Attenuation System
– Beamline Endstation• Nanoprobe
Conclusion

38/33PCAPAC 2016
Overview of some Feedback- & Control systems in Synchrotron SOLEIL
Conclusion - Feedback/feedforward systems in SOLEILConclusion - Feedback/feedforward systems in SOLEIL
Beamline Endstation
Nanoprobe
Storage Ring
Beamline
• 2D- & 3D scans with nanometric resolution & mm- range
• Possibility of fast continuous scans with low dynamic errors.
Maintaining stable photon beam flux and position
• 2D- & 3D tomography scans with nanometric resolution & mm-range while maintaining stable photon beam flux and position
• Possibility of fast continuous scans with low dynamic errors.


















