
Enhanced Protection of Vulnerable Road Users€¦ · VEHITS 2018, Funchal, Portugal, March 16, 2018...
54
VEHITS 2018, Funchal, Portugal, March 16, 2018 Enhanced Protection of Vulnerable Road Users Miguel Ángel Sotelo President. IEEE ITS Society [email protected] Full Professor University of Alcalá (UAH) SPAIN VEHITS 2018 - Keynote
Transcript of Enhanced Protection of Vulnerable Road Users€¦ · VEHITS 2018, Funchal, Portugal, March 16, 2018...
VEHITS 2018, Funchal, Portugal, March 16, 2018
Enhanced Protection of Vulnerable Road Users
Miguel Ángel SoteloPresident. IEEE ITS Society
[email protected] Full Professor
University of Alcalá (UAH)SPAIN
VEHITS 2018 - Keynote

VEHITS 2018, Funchal, Portugal, March 16, 2018 2
Motivation
Proposed approach
VRU pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content

VEHITS 2018, Funchal, Portugal, March 16, 2018 3
• Getting to understand the intent of an observedagent (VRU):It is of paramount interest in a large variety of domains thatinvolve some sort of collaborative and competitive scenarios
Motivation
RoboticsRoboticsRobotics
SurveillanceSurveillanceSurveillance HMIHMIHMI
GamingGamingGaming Intelligent VehiclesIntelligent VehiclesIntelligent Vehicles

VEHITS 2018, Funchal, Portugal, March 16, 2018 4
Motivation
• VRU Path Prediction in the Automotive:– Further improvement in state-of-the-art ADAS by meansof action classification
– Walking, Stopping, Starting, Bending-in
– Improvement of accuracy in 30-50 cm:
– Difference between effective and non-effectiveintervention in emergency braking systems
– Initiation of emergency braking 0.16 s in advance canpotentially reduce severity of accidents injuries by 50%
– Early recognition of pedestrians stopping actions canprovide more accurate last-second active interventions
Strong gains are expected in the performance and reliability of active VRU
protection systems
Strong gains are expected in the performance and reliability of active VRU
protection systems
Strong gains are expected in the performance and reliability of active VRU
protection systems

VEHITS 2018, Funchal, Portugal, March 16, 2018 5
Motivation

VEHITS 2018, Funchal, Portugal, March 16, 2018 6
Motivation
Proposed approach
Pedestrian pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content

VEHITS 2018, Funchal, Portugal, March 16, 2018 7
Proposed Approach
Global Scheme
Off-line Motion Capture System
Recovery of 3D pose and position
Lateral predicted position
On-line
Probabilistic Training
Knowledge of Pedestrians dynamics
Stereo Cameras
Transformation to latent space +
prediction
Geometric processing
3D Pedestrian Pose
Estimation

VEHITS 2018, Funchal, Portugal, March 16, 2018 8
Motivation
Proposed approach
Pedestrian pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content

VEHITS 2018, Funchal, Portugal, March 16, 2018 9
Pedestrian Pose Measurement
Steps
1. Computation of point cloud
2. Pedestrian extraction
3. Computation of 3D body joints (skeleton)
Goal
Estimation of a 3D pedestrian skeleton containing relevant body joints providing augmented features for path prediction
Inputs
Stereovision sequences obtained from different data-sets containing walking and stopping behaviors

VEHITS 2018, Funchal, Portugal, March 16, 2018 10
Pedestrian Pose Measurement
Pedestrian Skeleton considered in this research
VEHITS 2018, Funchal, Portugal, March 16, 2018 11
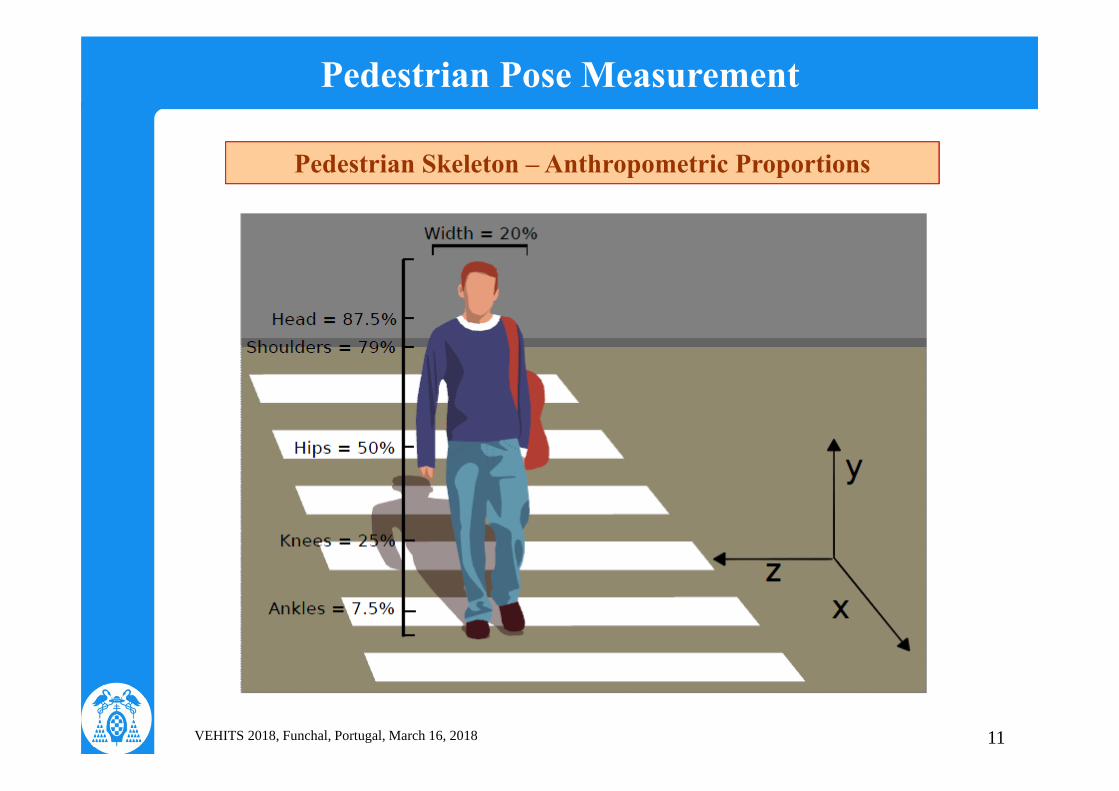
Pedestrian Pose Measurement
Pedestrian Skeleton – Anthropometric Proportions

VEHITS 2018, Funchal, Portugal, March 16, 2018 12
Pedestrian Pose Measurement
Pedestrian Shoulders Estimation

VEHITS 2018, Funchal, Portugal, March 16, 2018 13
Pedestrian Pose Measurement
Pedestrian Lower Limbs Estimation

VEHITS 2018, Funchal, Portugal, March 16, 2018 14
Pedestrian Pose Measurement
Method for Joints Extraction - Example

VEHITS 2018, Funchal, Portugal, March 16, 2018 15
Pedestrian Pose Measurement
Method for Joints Extraction – Results

VEHITS 2018, Funchal, Portugal, March 16, 2018 16
Pedestrian Pose Measurement
Body parts detection using Deep Learning
St: Confidence MapsLt: Parts Affinity Maps (PAF) (Z. Cao. CVPR 2017)

VEHITS 2018, Funchal, Portugal, March 16, 2018 17
Pedestrian Pose Measurement
Body parts detection using Deep Learning
Confidence maps of the right wrist (first row) and PAFs(second row) of right forearm across stages

VEHITS 2018, Funchal, Portugal, March 16, 2018 18
Pedestrian Pose Measurement
Body parts detection using Deep Learning

VEHITS 2018, Funchal, Portugal, March 16, 2018 19
Pedestrian Pose Measurement
Body parts detection using Deep Learning

VEHITS 2018, Funchal, Portugal, March 16, 2018 20
Motivation
Proposed approach
Pedestrian pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content

VEHITS 2018, Funchal, Portugal, March 16, 2018 21
Dimensionality Reduction
Major Goal
Learning the pedestrians motion dynamics by reducingthe dimensionality of input data and to make it moremanageable and interpretable in a low dimensional latentembedding
Method considered
GPDM (Gaussian Process with Dynamical Model)
Input data-set
CMU (41 body joints obtained with motion capture syst.)
VEHITS 2018, Funchal, Portugal, March 16, 2018 22
Dimensionality Reduction
CMU Sequence Example

VEHITS 2018, Funchal, Portugal, March 16, 2018 23
Dimensionality Reduction
GPDM (1/3)
1. Nonlinear probabilistic generalization of PCA: marginalization of the mapping (W) and optimization of the latent variables (X)
2. Conditional density in GPDM for a centered observed data Y, latent variable X, and kernel hyperparameters θ
where W is a scaling matrix and K is a kernel matrix with:
where δi,j is the Kronecker delta function

VEHITS 2018, Funchal, Portugal, March 16, 2018 24
Dimensionality Reduction
GPDM (2/3)
3. Dynamic mapping from latent coordinates:
where Xout=[X2, … , XN], d is the model dimension and KX is the kernel built from {X1, … , XN-1} with:
where βi are hyperparameters
4. Minimization of –ln p(X,θ,β,W|Y) using SCG

VEHITS 2018, Funchal, Portugal, March 16, 2018 25
Dimensionality Reduction
GPDM (3/3)
where
Prediction
1. Predicted latent position in the next frame (kX is a column vector)
2. Reconstructed 3D pose (kY is a column vector)

VEHITS 2018, Funchal, Portugal, March 16, 2018 26
Motivation
Proposed approach
Pedestrian pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content

VEHITS 2018, Funchal, Portugal, March 16, 2018 27
General Method - Overview

VEHITS 2018, Funchal, Portugal, March 16, 2018 28
Datasets
Frame Rate of training data
CMU data-set: 120 fps (frames per second)
Feature Vector
UAH: 11 body joints (3D pose + 3D motion: 11x6)
CMU: 41 (we consider only the 11 joints in common with UAH)
Pedestrian Behaviors
Walking (toward the curb to enter the road lane)
Stopping (at the curb)
Starting (from the curb)
Standing
Prediction Horizon
Up to 1.0 s

VEHITS 2018, Funchal, Portugal, March 16, 2018 29
Datasets
Blue markers (41 joints): CMU dataset
Red markers (11 joints): UAH dataset
VEHITS 2018, Funchal, Portugal, March 16, 2018 30
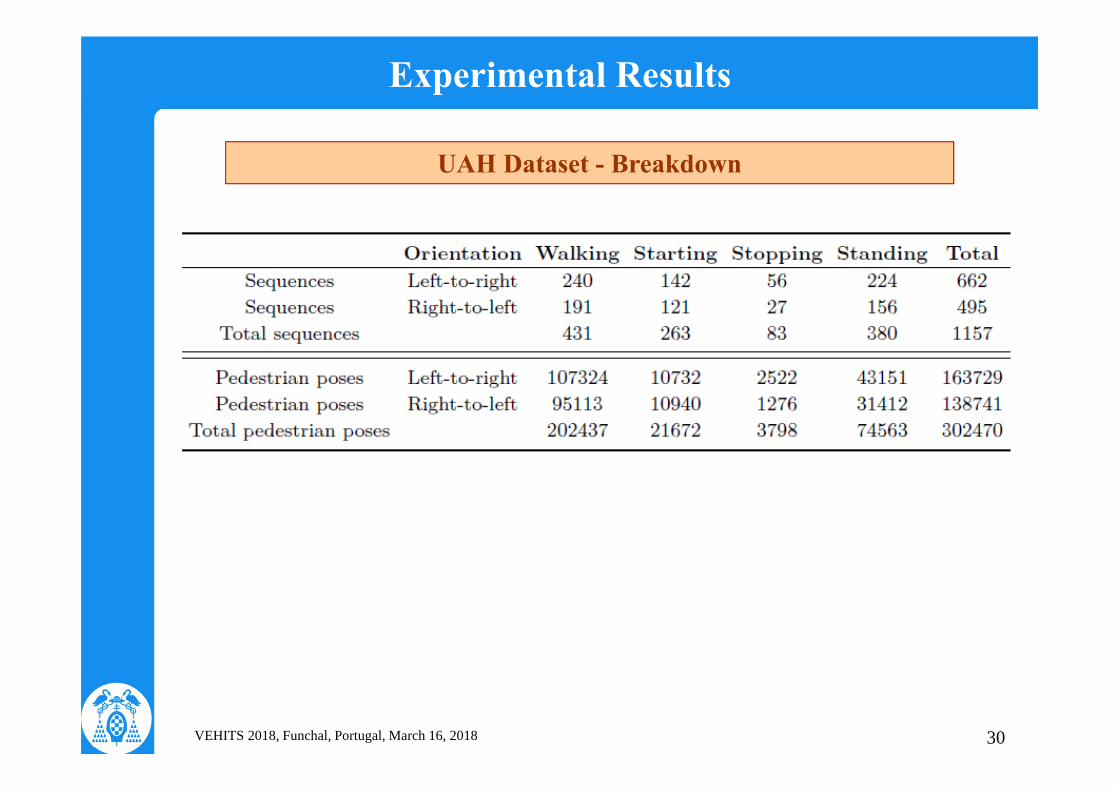
Experimental Results
UAH Dataset - Breakdown

VEHITS 2018, Funchal, Portugal, March 16, 2018 31
Manual Labelling of Pedestrian Poses
Standing-Starting Transition
Criteria: movement of leg forward

VEHITS 2018, Funchal, Portugal, March 16, 2018 32
Manual Labelling of Pedestrian Poses
Starting-Walking Transition
Criteria: pedestrian places foot on the ground after one stride

VEHITS 2018, Funchal, Portugal, March 16, 2018 33
Manual Labelling of Pedestrian Poses
Walking-Stopping Transition
Criteria: pedestrian places foot on the ground in the final stride before full stop

VEHITS 2018, Funchal, Portugal, March 16, 2018 34
Manual Labelling of Pedestrian Poses
Stopping-Standing Transition
Criteria: pedestrian comes to a full stop

VEHITS 2018, Funchal, Portugal, March 16, 2018 35
Learning Pedestrian Motion
Pedestrian walking 6 steps (using B-GPDM)
Green: projection of pedestrian motion sequence onto the subspace.
Variance in color code: cold (small) to warm (big)

VEHITS 2018, Funchal, Portugal, March 16, 2018 36
Activity Recognition
Clues for prediction of “Starting” behaviors

VEHITS 2018, Funchal, Portugal, March 16, 2018 37
Activity Recognition
Clues for prediction of “Stopping” behaviors

VEHITS 2018, Funchal, Portugal, March 16, 2018 38
Activity Recognition
Pedestrian activity modelled as HMM

VEHITS 2018, Funchal, Portugal, March 16, 2018 39
Activity Recognition
Pedestrian activity modelled as HMM
VEHITS 2018, Funchal, Portugal, March 16, 2018 40
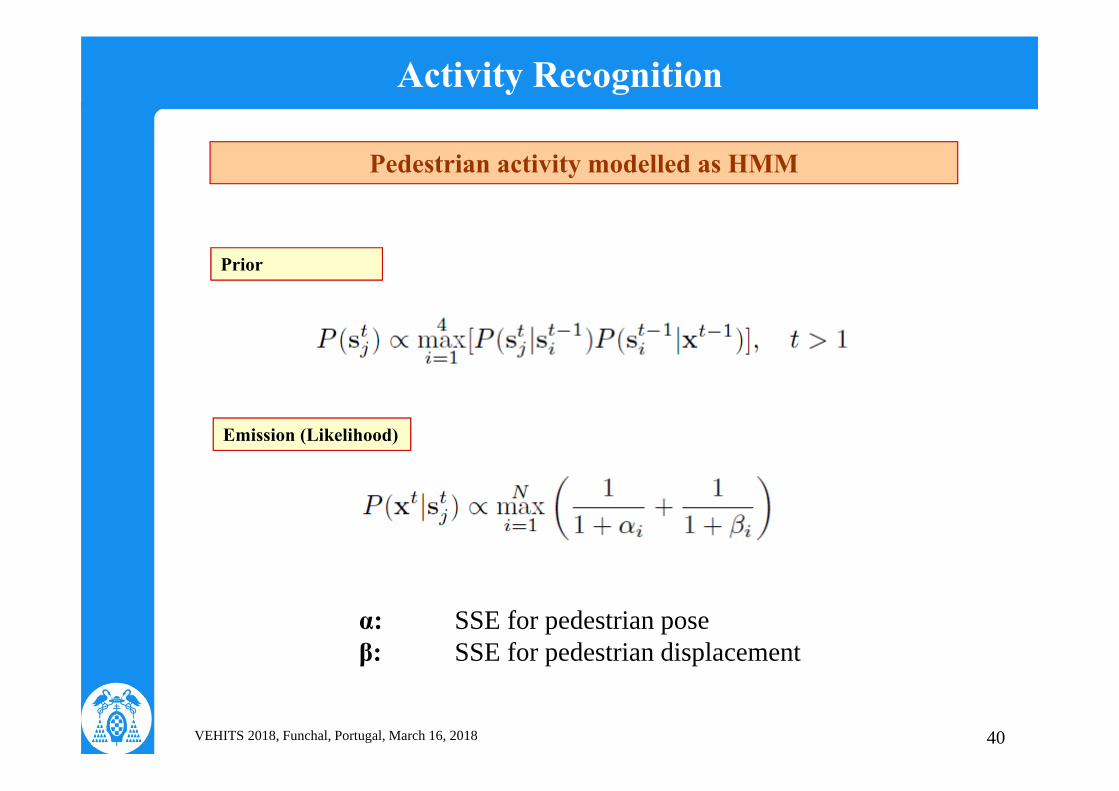
Activity Recognition
Pedestrian activity modelled as HMM
Prior
Emission (Likelihood)
α: SSE for pedestrian poseβ: SSE for pedestrian displacement

VEHITS 2018, Funchal, Portugal, March 16, 2018 41
Activity Recognition
Recognition results for different features and #joints

VEHITS 2018, Funchal, Portugal, March 16, 2018 42
Experimental Results
Probabilistic Action Classification

VEHITS 2018, Funchal, Portugal, March 16, 2018 43
Experimental Results
Detection Delay - Summary

VEHITS 2018, Funchal, Portugal, March 16, 2018 44
Experimental Results
Video sequence showing prediction results
VEHITS 2018, Funchal, Portugal, March 16, 2018 45
Experimental Results
UAH Prototype vehicle - DRIVERTIVE

VEHITS 2018, Funchal, Portugal, March 16, 2018 46
Experimental Results
Experiments in UTAC proving ground (France) – BRAVE H2020 Project

VEHITS 2018, Funchal, Portugal, March 16, 2018 47
Experimental Results
Experiments in UTAC proving ground (France) – BRAVE H2020 Project
Expected Contributions to Euro NCAP- Recommendations to Euro NCAP WG on AD on how to measure
performance of VRU prediction systems
- Enhanced performance in Euro NCAP tests by including predictions

VEHITS 2018, Funchal, Portugal, March 16, 2018 48
Experimental Results
Experiments in UTAC proving ground (France) – BRAVE H2020 Project

VEHITS 2018, Funchal, Portugal, March 16, 2018 49
Experimental Results
Experiments in UTAC proving ground (France) – BRAVE H2020 Project
VEHITS 2018, Funchal, Portugal, March 16, 2018 50
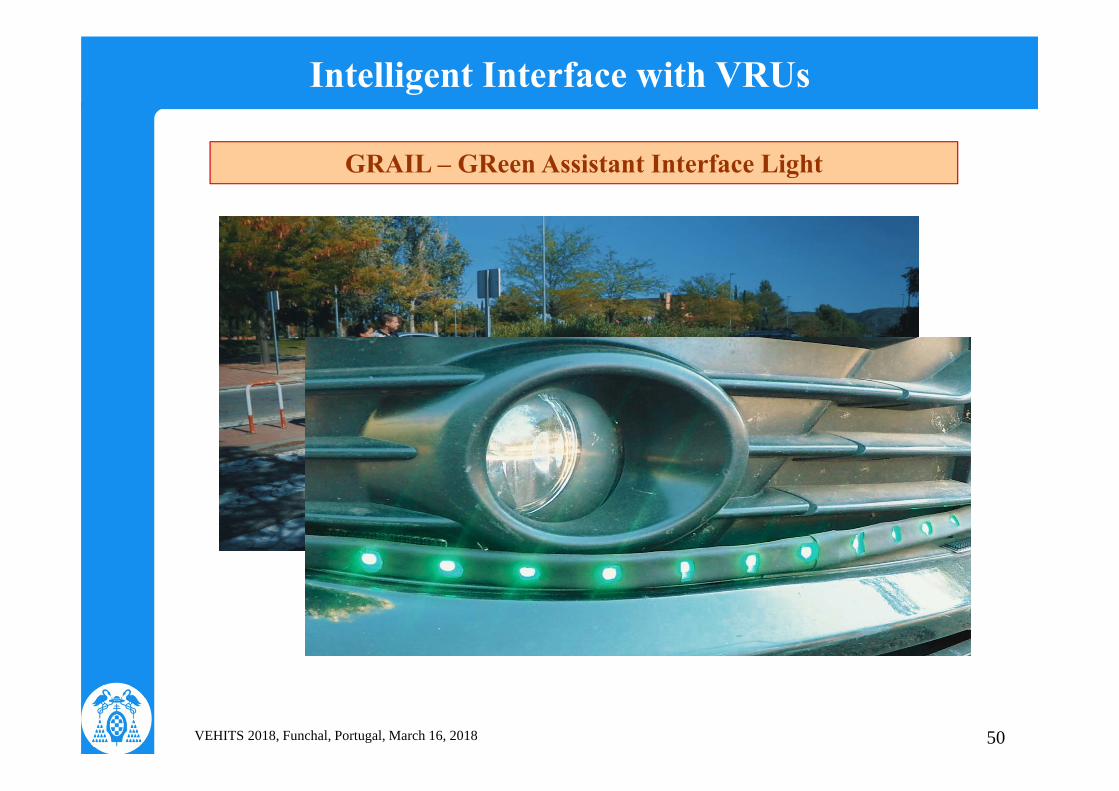
Intelligent Interface with VRUs
GRAIL – GReen Assistant Interface Light

VEHITS 2018, Funchal, Portugal, March 16, 2018 51
Intelligent Interface with VRUs
GRAIL – GReen Assistant Interface Light

VEHITS 2018, Funchal, Portugal, March 16, 2018 52
Motivation
Proposed approach
Pedestrian pose measurement
Dimensionality reduction and Prediction
Experimental results
Conclusions and Future Work
Content
VEHITS 2018, Funchal, Portugal, March 16, 2018
Conclusions and Future Work
Conclusions- Accurate path pedestrian prediction is possible up to 1.0 s using body language traits and probabilistic dimensionality reduction techniques
-Pedestrian 3D pose and body joints are detected using Deep Learning and transformed later on to a latent space using B-GPDM
- Predictions are carried out in the latent space, yielding results with a potential accuracy of 15-20 cm at a time horizon of 1.0 s
Future Work- Enhancement of prediction method using Deep Learning.
- Context-based action prediction using Probabilistic Graphical Models (Bayesian Networks) is under development, including:
- Gaze direction, group behavior.

VEHITS 2018, Funchal, Portugal, March 16, 2018
Enhanced Protection of Vulnerable Road Users
Thanks for your attentionMuito obrigado
Miguel Ángel SoteloPresident. IEEE ITS Society
[email protected] Full Professor
University of Alcalá (UAH)SPAIN
VEHITS 2018 - Keynote


















