DECOUPLED CONTROL STRATEGY OF GRID INTERACTIVE …
58
DECOUPLED CONTROL STRATEGY OF GRID INTERACTIVE INVERTER SYSTEM WITH OPTIMAL LCL FILTER DESIGN ANUP ANURAG (109EE0250) Department of Electrical Engineering, National Institute of Technology, Rourkela brought to you by CORE View metadata, citation and similar papers at core.ac.uk provided by ethesis@nitr
Transcript of DECOUPLED CONTROL STRATEGY OF GRID INTERACTIVE …

DECOUPLED CONTROL STRATEGY OF GRID
INTERACTIVE INVERTER SYSTEM WITH
OPTIMAL LCL FILTER DESIGN
ANUP ANURAG (109EE0250)
Department of Electrical Engineering,
National Institute of Technology, Rourkela
brought to you by COREView metadata, citation and similar papers at core.ac.uk
provided by ethesis@nitr

- 2 - | P a g e
DECOUPLED CONTROL STRATEGY OF GRID
INTERACTIVE INVERTER SYSTEM WITH OPTIMAL
LCL FILTER DESIGN
A Thesis submitted in partial fulfillment of the requirements for the degree of
Bachelor of Technology in “Electrical Engineering”
By
ANUP ANURAG (109EE0250)
Under the guidance of
Prof. B.CHITTI BABU
Department of Electrical Engineering
National Institute of Technology
Rourkela-769008 (ODISHA)
May-2013

- 3 - | P a g e
DEPARTMENT OF ELECTRICAL ENGINEERING
NATIONAL INSTITUTE OF TECHNOLOGY, ROURKELA
ODISHA, INDIA-769008
CERTIFICATE
This is to certify that the thesis titled “Decoupled Control Strategy of Grid
Interactive Inverter System with Optimal LCL Filter Design”, submitted to the
National Institute of Technology, Rourkela by Mr. Anup Anurag, Roll No:
109EE0250 for the award of Bachelor of Technology in Electrical Engineering is a
bonafide record of research work carried out by him under my supervision and
guidance.
The candidate has fulfilled all the prescribed requirements.
The thesis which is based on candidate’s own work, has not submitted elsewhere
for a degree/diploma.
In my opinion, the thesis is of standard required for the award of a Bachelor of
Technology in Electrical Engineering.
Prof. B. Chitti Babu
Supervisor
Department of Electrical Engineering
National Institute of Technology
Rourkela – 769 008 (ODISHA)

i | P a g e
ACKNOWLEDGEMENTS
I have been highly indebted in the preparation of this report to my supervisor, Prof. B.
Chitti Babu, whose patience and kindness, as well as his academic experience, has been
invaluable to me. I could not have asked for a better role model, inspirational, supportive, and
patient guide. I could not be prouder of my academic roots and hope that I can in turn pass on
the research values and the dreams that he has given to me.
The informal support and encouragement of many friends has been indispensable, and
I would like particularly to acknowledge the contribution of all the students working under
Prof. B. Chitti Babu.
I would not have contemplated this road if not for my parents, who instilled within me
a love of creative pursuits, science and language, all of which finds a place in this report.
AnupAnurag
109EE0250

ii | P a g e
Dedicated to
My Parents and My Brother

iii | P a g e
ABSTRACT
This thesis presents a control strategy for a three-phase grid interactive voltage source
inverter (VSI) that links a renewable energy source to the utility grid through a LCL-type
filter. An optimized LCL-type filter has been designed and implemented so as to reduce the
current harmonics in the grid considering the conduction and switching losses at constant
modulation index (Ma). The control strategy adopted here decouples the active and reactive
power loops, thus achieving desirable performance with independent control of active and
reactive power injected to the grid. The startup transients are also controlled by the
implementation of this particular control method. Another control technique has also been
studied so as to overcome the hitches faced by the conventional controllers. It
counterbalances the distortions in grid voltage by injecting sinusoidal current into the grid.
The filter has been designed considering the conduction and switching copper losses as well
as core losses. A tradeoff has been made between the total losses due to the inductor and the
THD% of the grid current, and the filter inductor has been designed accordingly. In order to
study the dynamic performance of the system and to confirm the analytical results, the
models are simulated in the MATLAB/Simulink environment and the results are analyzed.

iv | P a g e
CONTENTS
Abstract i
Contents ii
List of Figures iv
List of Tables vi
Abbreviations and Acronyms vii
CHAPTER 1
INTRODUCTION
1.1 Motivation 3
1.2 Background and Literature Review 4
1.3 Thesis Objectives 5
1.4 Organization of Thesis 5
CHAPTER 2
CONTROL OF GRID CONNECTED INVERTER FOR SINUSOIDAL CURRENT
INJECTION WITH IMPROVED PERFORMANCE
2.1 Introduction 8
2.2 Mathematical Modeling of Grid Connected Inverter System 8
2.3 Control Algorithm of Grid Connected Inverter 10
2.3.1 Analysis of Current Controller 10
2.3.2 Filter Design 12
2.3.3 Active and Reactive Power Control 12
2.4 Results and Discussions 15
2.4.1 Active and Reactive Power Control 16
2.4.2 Current Control Strategy 18
A. Under Voltage Sag 18
B. Under line to ground fault 20
C. Under presence of harmonics using conventional controller 21

v | P a g e
D. Under presence of harmonics using MRF PI controller 23
2.5 Conclusions 24
CHAPTER-3
DECOUPLED CONTROL STRATEGY OF GRID INTERACTIVE INVERTER
SYSTEM
3.1 Introduction 26
3.2 Mathematical Modeling of Three Phase Grid Connected Inverter 26
3.3 Control Strategy of the Three Phase Grid Connected Inverter 27
3.4 Results and Discussions 31
3.5 Conclusions 33
CHAPTER-4
FILTER DESIGN USING POWER LOSS CALCULATIONS
4.1 Introduction 35
4.2 Filter Design 35
4.2.1 Inductor Power Loss 36
4.2.2 Damping Circuit and Capacitor 37
A. Fundamental Frequency Power Loss 37
B. Switching Frequency Power Loss 37
4.3 Results and Discussions 38
4.4 Conclusions 41
CHAPTER-5
CONCLUSIONS AND FUTURE WORK
5.1 Conclusions 44
References 45
Publications 49

vi | P a g e
LIST OF FIGURES
Fig. No Name of the Figure Page No.
2.1 Schematic diagram of Grid Connected PWM Inverter 8
2.2 MRF PI Current Controller structure 12
2.3 Schematic diagram for the Grid Connected Inverter with its control 14
2.4 (a) Distorted grid voltages 17
(b) dq components of distorted grid voltages. 17
(c) Converter current to the grid 17
(d) q-current component converter response 18
(e) Harmonic spectrum of the grid current 18
2.5 (a) Distorted grid voltages 19
(b) Converter current to the grid 19
(c) d-current component converter response 19
(d) q-current component converter response 19
(e) Harmonic spectrum of the grid current 20
2.6 (a) Distorted grid voltages 20
(b) Converter current to the grid 20
(c) d-current component converter response 20
(d) q-current component converter response 21
(e) Harmonic spectrum of the grid current 21
2.7 (a) Distorted grid voltages 21
(b) Converter current to the grid 22
(c) d-current component converter response 22
(d) q-current component converter response 22

vii | P a g e
(e) Harmonic spectrum of the grid current. 22
2.8 (a) Distorted grid voltages 23
(b) Converter current to the grid 23
(c) d-current component converter response 23
(d) q-current component converter response 23
(e) Harmonic spectrum of the grid current 24
3.1 Schematic Diagram of Three Phase GCI with LCL-type Filter 26
3.2 Control System block diagram of the LCL -type converter 31
3.3 (a) dc-link voltage across the capacitor 32
(b) d and q axis current 32
(c) Grid current waveforms 32
4.1 LCL-type filter with passive damping scheme 35
4.2 Total Power loss vs Inductance value 39
4.3 Plot between THD% and Power Losses vspu value of inductance 39
4.4 Harmonic waveform of the grid current at optimum inductor values 40

viii | P a g e
LIST OF TABLES
Table. No. Name of the Table Page No.
2.1 Parameters used in Simulation 16
3.1 Design Parameters for Control Algorithm 31
5.2 Losses at different inductance values 38
4.2 Design Parameter of LCL type filter 40

ix | P a g e
ABBREVIATIONS AND ACRONYMS
GCI - Grid Connected Inverter
DG - Distributed Generation
MRF - Multiple Reference Frame
PI - Proportional Integral
AC - Alternating Current
DC - Direct Current
MATLAB - MATrix LABoratory
VSI - Voltage Source Inverter
PID - Proportional, Integral and Derivative
IGBT - Insulated Gate Bipolar Transistor
SRF - Synchronous Reference Frame

10 | P a g e
CHAPTER 1
Introduction

11 | P a g e
1.1 MOTIVATION
With the impending deregulated environment, it is imperative that the new technologies
provide acceptable power quality and reliability. It has been prophesized that Distribution
Generation (DG) System would play a very vital role in the coming years for meeting the
future energy demand with clean and green environment. Various DG technologies are
present including the photovoltaic systems, wind turbines, gas turbines, diesel engines and
fuel cell systems [1]. At present, wind energy and photovoltaic have become the most
competitive among all. The advent of power electronic devices has also ushered a new era for
the maintenance of power quality as they efficiently interface these renewable energy systems
to the grid. The integration of these renewable energy to the grid can result is several benefits
including line loss reduction, increased overall energy efficiency, reduced environmental
impacts, relieved transmission and distribution congestion etc. However, the asynchronous
interface provided by the power electronic converter raises issues regarding power quality
[1].The power conversion unit basically consists of the source side and the grid side
converters. Due to the persistent narrowing of the standards in the grid code compliances, the
grid connected inverter control has taken the centre stage whenever we consider the
improvement of DGS. The grid code compliances include control of active and reactive
power between the DGS and the grid, balancing the power flow between the input side
converter and the grid, providing high output power quality and maintaining synchronization
with the grid [2].The main functions of the controllers are to maintain the power quality and
to control the active and the reactive power of the grid independently. Optimal filter design is
necessary so as to reduce the current harmonics in the grid considering the conduction and
switching losses at constant modulation index (Ma) leading to better power quality.

12 | P a g e
1.2 BACKGROUND AND LITREATURE REVIEW
A number of control strategies have been proposed and are extensively studied in the
available literature [3-5]. Proper power flow regulation using vector control principle has also
been proposed in [6]. Dual Vector Current control which was first proposed in [7] uses two
VCC’s for positive and negative sequence components along with DC link voltage control.
Synchronous PI current control has also been proposed in [8] which convert the three phase
grid voltages to synchronously rotating (dq) frame for proper decoupling. The grid currents
become DC variables and thus no steady state-state error adjustment is required. A method
for active and reactive power control has been mentioned in [9]. It controls the DC link
voltage by designing a Voltage Control Loop. However, the transient time has not been taken
into consideration. Harmonics mitigation techniques have also been proposed using high-pass
and low-pass filters in [6] which don’t take into account the effect of the filters on the control
loop. The MRF PI controller developed in [2] doesn’t need dq current signal high pass and
low pass filtering. However, it also doesn’t take the filters into consideration while deriving
the control strategy for independent active and reactive power control.
For study purposes, the L-type decoupling terms have been applied to LCL -type filters for
designing the controllers [3,10]. This is just an approximate solution which causes
performance and stability problems for higher values of switching frequencies [3]. However,
this problem has been mitigated in [3] by further addition of second-order transfer functions
in the control loops but they do not guarantee the damping of the resonance mode. An
alternative approach to tackle the problem has been introduced in [11] which is based on a
linear full state feedback and deadbeat control. However, this doesn’t consider the nonlinear
dynamics of the dc link voltage.

13 | P a g e
Also, for the reduction of the current harmonics in the grid an optimal LCL- type filter
design is imperative. LCL-type filters installed at converter outputs offer higher harmonic
mitigation, but careful design is required to damp LCL resonance. Out of the two damping
processes available we prefer passive damping for grid connected applications [8].
1.3 THESIS OBJECTIVES
The following objectives are hopefully achieved at the end of the project.
1. To control the three phase grid connected inverter system for sinusoidal current
injection with improved performance
2. To analyse a control strategy for the three-phase grid connected inverter
3. To provide an optimal filter design which includes the power loss calculations
4. To analyse the results obtained through simulation in the MATLAB/Simulink
environment.
1.4 ORGANISATION OF THESIS
The thesis has been organised into six chapters including the introduction. Each chapter is
different from the other and is described along with the necessary theory required to
comprehend it.
Chapter 2 deals with a control strategy for a three-phase Grid Connected Inverter (GCI)
under abnormal conditions of the grid like voltage sag, line to ground fault and presence of
harmonics. This strategy intends to overcome the hitches faced by the conventional controller
working under abnormal conditions of the grid. The control strategy adopted here
counterbalances the distortions in grid voltage by injecting sinusoidal current into the grid. In
addition to this, active and reactive power control during the step changes of the load has also
been studied. In order to study the dynamic performance of the system, the models are
simulated and the results are analysed.

14 | P a g e
Chapter 3 presents a control strategy for a three-phase grid interactive voltage source
inverter (VSI) that links a renewable energy source to the utility grid through a LCL-type
filter. The control strategy adopted here decouples the active and reactive power loops, thus
achieving desirable performance with independent control of active and reactive power
injected to the grid. The start-up transients are also controlled by the implementation of this
particular control method. In order to study the dynamic performance of the system and to
confirm the analytical results, the models are simulated in the MATLAB/Simulink
environment and the results are analysed.
Chapter 4 presents the optimal design of the LCL-type filter which links a renewable
energy source to the utility grid through a LCL-type filter. The optimal design has been made
so as to reduce the current harmonics in the grid considering the conduction and switching
losses at constant modulation index (Ma). It takes into effect the conduction and switching
copper losses as well as core losses. A trade-off has been made between the total losses due to
the inductor and the THD% of the grid current, and the filter inductor has been made
accordingly. In order to study the dynamic performance of the system and to confirm the
analytical results, the models have been simulated in the MATLAB/Simulink environment
and the results are analysed.
Chapter 5 concludes the work and describes the future scope of the same. Some possible
limitations in the work have also been provided. The future work that can be done in
improving the current scenario is mentioned.

15 | P a g e
CHAPTER 2
Control of Grid Connected
Inverter System for Sinusoidal
Current Injection with Improved
Performance

16 | P a g e
2.1 INTRODUCTION
A design of a current controller along with active and reactive power control in order to
ameliorate the power quality in the grid is shown. This technique intends to overcome the
hitches faced by the conventional controller working under unbalanced conditions of the grid.
The control strategy adopted counterbalances the distortions in grid voltage by injecting
sinusoidal current to the grid through a MRF PI controller strategy [19]. For the active and
reactive power control, cross coupling is done in order to decouple the d-q components and
thus helping in effective control of the active and reactive power independently.
2.2 MATHEMATICAL MODELING OF GRID CONNECTED INVERTER
SYSTEM
The schematic diagram of three phase grid-connected PWM inverter is shown in Fig. 2.1,
which consists of dc link capacitor, IGBT switches and filter circuit in the grid side.
PHOTO-VOLTAIC
(PV) PANEL
Va
Vb
Vc
L1
C1
Pin
v
+
- L1
L1
RENEWABLE ENERGY
SOURCE2- LEVEL PWM VSI
L FILTERUTILITY GRID
DC LINK
Fig. 2.1. Schematic diagram of Grid Connected PWM Inverter
Assume that the three phase loop resistance R and L are of the same value, affection of
distribution parameters are negligible and switching loss and on state voltage drop is
negligible.

17 | P a g e
Based on the topology, the dynamic equation of the output side of the grid connected
inverter can be deduced as follows:
)()(
)()( tRidt
tdiLtvte abc
abc
abcabc
(2.1)
We can write the dynamic equation for the input side of the grid connected inverter as:
dt
tdvCtititi dc
Ldcc
)()()()(
(2.2)
The line voltages and the phase currents can be transformed into synchronous reference
frame (dq coordinates) by the use of the transformation matrix
)(.)( tvTtv abcdq
(2.3)
where
1)3/2sin()3/2cos(
1)3/2sin()3/2cos(
1)sin()cos(
T
is the transformation matrix and is the rotating angle of transformation
Now we can transform the dynamic equation directly into synchronous reference frame (dq
coordinates)
)()(
)()()( tMiLdt
tdiLtRitvte dq
dq
dqdqdq
(2.4)
000
001
010
M
By assuming that the three phase voltage source is balanced without the zero sequence
components we can write
)()()(
)()( tiLtRidt
tdiLtetv qd
ddd
(2.5)

18 | P a g e
)()()(
)()( tiLtRidt
tdiLtetv dq
q
(2.6)
The s-domain representation can be shown as follows:
)]()()([1
)( sLisvseRLs
si qddd
(2.7)
)]()()([1
)( sLisvseRLs
si dqqq
(2.8)
For the input side of the converter
dc
L
Ldc i
sCR
Rv
1
(2.9)
Now for the instantaneous power equations we can write
)()(*.)( tjQtPIEtS (2.10)
where * represents the complex conjugate
)(tP represents the instantaneous active power and
)(tQ represents the instantaneous reactive power
)]()()()([2
3)(
)*])(Re[(2
3
titetitetP
jIIjEEP
qqdd
qdqd
(2.11)
)]()()()([2
3)(
)*])(Im[(2
3
titetitetQ
jIIjEEQ
qddq
qdqd
(2.12)
2.3 CONTROL ALGORITHM OF GRID CONNECTED INVERTER
2.3.1 Analysis of Current Controller
Conventional current controllers use only cross coupling and feedforward terms. It has
been seen that even with certain modifications in the PLL structure, there is little
improvement in the power quality, the main culprit being the lower order harmonics.

19 | P a g e
It is seen that the distribution grid voltage is considerably distorted due to the presence of
nonlinear loads. This leads to the presence of significant lower order harmonic content
especially of 5th
, 7th
, 11th
and 13th
order.
)7cos()5cos()cos( 751 VVVva
)3
2(7cos)
3
2(5cos)
3
2cos( 751
VVVvb (2.13)
)3
2(7cos)
3
2(5cos)
3
2cos( 751
VVVvc
,...,, 751 VVV denotes the magnitude of the harmonics.
Transforming these into synchronously rotating reference frame we get
.....)12sin()()6sin().(
.....)12cos()()6cos().(
131175
1311751
VVVVv
VVVVVv
d
d
(2.14)
In addition to these, there are other higher order harmonics present. However, we do not
take them into consideration due to their low magnitudes in the system. Here it is seen that
the d-q grid voltage components have basically frequency components which are multiples of
six of the frequency of the grid. During unbalance conditions such as voltage sags, presence
of harmonics and fault conditions the conventional controller fails to provide the required
sinusoidal grid current and voltage which degrades the power quality of the system.
In order to mitigate lower order harmonics in the grid current, we require a modified
current controller to ensure proper operation of the grid under distorted conditions. The use of
multiple reference frame (MRF) PI controller is used here as shown in Fig. 2.2. The MRF PI
controller doesn’t extract harmonics from the current by the application of high-pass and low
pass filter but injects a component antagonistic to the harmonics present in the same [16]:

20 | P a g e
Fig. 2.2. MRF PI Current Controller structure
2.3.2 Filter Design
It is seen that the converter current is mostly plagued by the lower order harmonics, the
major ones being the lower order harmonics. Appropriate L filters are designed in order to
filter out the harmonic components from the current and thus making them sinusoidal. The
design of the L filters can be done according to the formula [17]:
aa
SWripplerated
dc mmfI
VL )1(
.4
(2.15)
where ratedI is the rated utility current, ripple is the maximum ripple magnitude percentage (5
% - 25 %), dcV is the DC link voltage, L is the total filter inductance, fsw
is the switching
frequency (in Hz) and am is the modulation index.
2.3.3 Active and Reactive Power Control
Moreover the active and reactive power control isn’t possible in case of the conventional
controller. We use the feedback from the grid in order to generate the current reference which
in turn controls the active and reactive power independently. The advantage of dynamic VAR

21 | P a g e
systems is that they detect and instantaneously compensate for voltage disturbances by
injecting leading or lagging reactive power at crucial junctures to the power transmission
grids. Through the dynamic VAR control system, reactive power is supplied in the grid with
fast dynamics. Thus it helps in regulating the system voltage and stabilizing the grid [18].
The instantaneous power flowing into the grid can be written as
)()()( tjQtPtS (2.16)
The instantaneous active and reactive power equations are given by:
)]().()().([2
3)(
)]().()().([2
3)(
titetitetQ
titetitetP
qddq
qqdd
(2.17)
The dc- link power is known by:
dt
dVCtVtItVtP dc
dcdcdcdc ).()().()(
(2.18)
Assuming that the inverter losses are neglected i.e. the switching losses are zero we can
equate the input power with the output power and the power balance can be given by
)]().()().([2
3titutitu
dt
dVCV qqdd
dcdc
(2.19)
Assuming balanced case and taking the q-components to be zero we get
)()(2
3)( titetP dd
(2.20)
From (2.5) and (2.6) it can be seen that the d-component and the q-component are highly
coupled which leads to the degradation of the dynamic performance. The vector controller
decouples these terms and thus providing the ability to control each current component.

22 | P a g e
Fig. 2.3. Schematic diagram for the Grid Connected Inverter with its control
The elementary principle of the vector oriented control method is to control the
instantaneous active and reactive grid power which can be done by controlling the grid
currents, by separate controllers independent of each other. Two current controllers are
employed namely d-current controller and q-current controller. The grid voltages and currents
are first sensed and with the help of Synchronous Reference Frame (SRF) Phase Locked
Loop, the grid phase angle is detected in order to synchronize the GCI output with grid.
The demanded amount of current and voltage are then estimated from the grid at the
desired power factor and the reference currents in a synchronous frame are calculated.
Consequently, the current controllers try to reduce the error and make the load currents follow
the reference current vector. Thus we try to control the current and therefore controlling the
inherent power flow. So by this process, the active and reactive powers are meticulously
controlled.
The converter DC voltage is determined by:
dttItIC
tV ldcdc .)]()([1
)(
(2.21)

23 | P a g e
The DC voltage can be regulated using PI controller by choosing the current reference
dttVVKtVVKtI dcdcrefidcdcref
v
dcref p)].([)]([)(
(2.22)
wheredcrefV is the reference DC link voltage,
pK and iK are the constant gains of the PI
controller.
The reference currents can be given by:
)]().()().([3
2)(
)]().()().([3
2)(
tQtUtPtUti
tQtUtPtUti
refdrefqqref
refqrefddref
(2.23)
where 22
qd uu , )(tPref and )(tQref are the active and reactive power references.
Now,
)()()()(
)()()()(
tiLtRiUtetv
tiLtRiUtetv
dqqqqref
qddddref
(2.24)
Where vdref(t) and vqref(t)are the d and q voltage references. Ud and Uq are the effective voltage
references.
dttitiKtitiKU
dttitiKtitiKU
qqrefiqqrefpq
ddrefiddrefpd
)].()([)]()(.[
)].()([)]()(.[
(2.25)
Where Kp and Ki are the constant gains of the PI controller.
2.4 RESULTS AND DISCUSSIONS
To validate the MRF PI current controller for Grid Connected Inverter (GCI), extensive
computer simulations were performed using MATLAB/Simulink. Under distorted and
undistorted conditions, the detailed switching model of the space vector modulated
(SVPWM) grid connected inverter has been developed.
The system parameters used in the simulations are given in the Table-2.1

24 | P a g e
TABLE 2.1
PARAMETERS USED IN SIMULATION
Parameter Label Value
Coupling inductance L 7.52 [mH]
Coupling resistance R 0.26 [Ω]
Grid voltage V 240 [V]
DC link voltage Vdc 580 [V]
Switching frequency fSW 5000 [Hz]
Base voltage Vb 964 [V]
Base current Ib 7.84 [A]
The values of the gains Kp and Ki are calculated according to the formulae [18]:
dc
SW
pV
fK
.
dc
SW
iV
fK
.2
.2
(2.26)
where
RL / is grid time constant ;
L is the coupling inductance between the GCI and the grid,
R is the coupling resistance
Vdc is the dc-link voltage in p.u.
fSW is the switching frequency.
The values of the gains Kp and Ki of the MRF PI controller are calculated according to the
formulae [19]
dcSW
pVT
K.3
4 and
i
p
i
KK
where
i =0.02 s (2.27)
2.4.1 Active and Reactive Power Control
For the study of dynamic VAR compensation, a single case is considered i.e. a step
change of the load. A lagging reactive load is added at 0.02 sec. as shown in the Fig 4. The
reference currents are generated from the grid side according to the (2.23) and the actual
values are compared with the reference values through PI controllers in order to bring the
currents and thus the power to their respective reference values.

25 | P a g e
In order to estimate the power injection characteristics we carry out the test of increasing
the reactive load component. The step change to the load is made at 0.02 sec .The response of
the controller is shown in Fig 2.4. With the change in load at 0.02 s, the active current
decreases in order to supply the lagging power to the load (Fig. 2.4(d)). The reactive current
first decreases and then increases to go above the reference value to compensate for the
reactive nature of the load. The converter phase current decreases due to the change in the
load as shown in Fig. 2.4(e). The grid d voltages show a change due to the step change in the
load. The harmonic spectrum using Fast Fourier Analysis for the current is realized in Fig.
2.4(f). We analyze the converter current which shows a THD of 0.66 % which is very much
within the permitted distortion levels as per IEEE 519-1992 specifications.
(a)
(b)
(c)
0 0.01 0.02 0.03 0.04 0.05 0.06-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Time [sec]
Grid
vol
tage
s va
bc [p
.u.]
Va
Vb
Vc
0 0.01 0.02 0.03 0.04 0.05 0.06-0.5
-0
0.5
0.1
0.15
0.2
0.25
0.3
Time [sec]
Grid
dq
volta
ges
Vdq
[p.u
.]
Vd
Vq
0 0.01 0.02 0.03 0.04 0.05 0.06-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Time [sec]
Grid
pha
se c
urre
nts
Iabc
[p.u
.]
Ia
Ib
Ic

26 | P a g e
(d)
(e)
Fig. 2.4. (a) Distorted grid voltages (b) dq components of distorted grid voltages. (c) Converter current to the
grid (d) q-current component converter response (e) Harmonic spectrum of the grid current
2.4.2 Current Control Strategy
In order to authenticate the MRF PI controller we take three different conditions of the
grid. The first case investigates the operation under voltage sag conditions. Next the grid
voltages and currents under line to ground fault conditions were analysed and finally we
observe the GCI operation under injection of non-sinusoidal grid voltages.
The MRF PI current controller is basically focused on the mitigation of harmonics in the
converter phase currents. However, it also shows considerable improvement in other
unbalanced conditions. The comparative study regarding the presence of harmonics is
analysed in detail here. Thorough comparisons regarding the other cases are avoided for
brevity.
A. Under Voltage Sag
The voltage sag conditions are employed with the help of a three phase programmable AC
source in Simulink environment as shown in Fig. 2.5. The frequency was maintained at 50
0 0.01 0.02 0.03 0.04 0.05 0.06-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Time [sec]
q-cu
rrent
act
ual [
p.u.
]
iq current actual
0 0.01 0.02 0.03 0.04 0.05 0.06
-0.01
0
0.01
Selected signal: 3 cycles. FFT window (in red): 2 cycles
Time (s)
0 100 200 300 400 500 600 700 800 900 10000
20
40
60
80
100
Frequency (Hz)
Fundamental (50Hz) = 0.01212 , THD= 0.66%
Mag (
% o
f F
undam
enta
l)

27 | P a g e
Hz. Voltage amplitude was maintained at 0.2468 p.u. The sag is forced at 0.03 sec and
maintained up to 0.05 sec. (Fig 2.5(a)). The reference d-current is taken as a step input and
the reference q current was maintained at zero. SRF PLL is used for the detection of phase
such that the d-component of the grid voltage is maintained at phase voltage and the q
component is maintained at zero.
(a)
(b)
(c)
(d)
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Grid
Vol
tage
Vab
c [p
.u.]
Va
Vb
Vc
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Conv
erte
r Pha
se C
urre
nt Ia
bc [p
.u.]
Ia
Ib
Ic
0.01 0.02 0.03 0.04 0.05
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Time [sec]
d-cu
rrent
act
ual [
p.u.
]
d current actual
0.01 0.02 0.03 0.04 0.05
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
q-cu
rrent
act
ual I
q [p
.u.]
q current actual

28 | P a g e
(e)
Fig. 2.5. (a) Distorted grid voltages (b) Converter current to the grid (c) d-current component converter response
(d) q-current component converter response (e) Harmonic spectrum of the grid current
B. Under line to ground fault
The grid is assumed to be under fault from 0.03 sec to 0.05 sec. which was created with
the help of a programmable AC source in Simulink environment. Reference d current and
reference q current are taken the same as before. SRF PLL is used for detection of the phase
and to transform the abc to dq reference frame in order to maintain proper decoupling
between the d and q voltages of the grid. The grid voltages and grid currents were then
examined.
(a)
(b)
(c)
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Grid
Pha
se V
olta
ges
Vabc
[p.u
.]
Va
Vb
Vc
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Conv
erter
Phas
e Curr
ent I
abc [
p.u.]
Ia
Ib
Ic
0 0.01 0.02 0.03 0.04 0.05 0.06-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time [sec]
d-curr
ent a
ctual
Id [p.
u.]

29 | P a g e
(d)
(e)
Fig. 2.6. (a) Distorted grid voltages (b) Converter current to the grid (c) d-current component converter response
(d) q-current component converter response (e) Harmonic spectrum of the grid current
C. Under presence of harmonics using conventional controller
Due to the presence of huge proportions of non-linear load, the grid voltages generally
deviate from its sinusoidal nature.
A robust controller is required in order to maintain reliability and regulate quality power
flow to the load. Fig. 2.7 gives simulation results for GCI operation connected to the distorted
grid when the conventional controller is used. The response of the current controller was
observed. All the other parameters remained the same as in the previous cases.
(a)
(b)
0 0.01 0.02 0.03 0.04 0.05 0.06-0.2
-0.15
-0.1
-0.05
0
0.05
Time [sec]
q-cu
rrent
act
ual [
p.u.
]
Iq
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Grid
Volta
ges V
abc [
p.u.]
Va
Vb
Vc
0 0.01 0.02 0.03 0.04 0.05 0.06-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Time [sec]
Conv
erter
curre
nt Iab
c [p.u
.]
Ia
Ib
Ic

30 | P a g e
(c)
(d)
(e)
Fig.2.7. (a) Distorted grid voltages (b) Converter current to the grid (c) d-current component converter response
(d) q-current component converter response (e) Harmonic spectrum of the grid current.
Fig. 2.7 (e) shows that the harmonics compensation capability is very poor considering
the use of the conventional controller. The THD level of 16.23 % expresses it all. From the
Fig. 7(c) and 7(d) it is obvious that the 6th
harmonic and the 12th
harmonic components
present around the reference values aren’t eliminated.
D. Under presence of harmonics using MRF PI controller
In order to satisfy this drawback the MRF PI current controller is used where mitigation
techniques for the 6th
and the 12th
harmonics are employed. Fig. 2.8 shows the simulation
results for the GCI operation connected to distorted grid when the MRF PI controller was
used.
0.01 0.02 0.03 0.04 0.05-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time [sec]
d-cu
rrent
act
ual I
d [p
.u.]
d current
0.01 0.02 0.03 0.04 0.05-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Time [sec]
q-cu
rrent
act
ual I
q [p
.u.]

31 | P a g e
(a)
(b)
(c)
(d)
(e)
Fig. 2.8. (a) Distorted grid voltages (b) Converter current to the grid (c) d-current component converter response
(d) q-current component converter response (e) Harmonic spectrum of the grid current
It is seen from the Fig. 2.8(e) that, the THD of the grid current is reduced to 2.68 % in
comparison to the THD of 16.23 % of conventional controller with sinusoidal current
0 0.01 0.02 0.03 0.04 0.05 0.06-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Grid
Volta
ges V
abc [
p.u.]
Va
Vb
Vc
0.01 0.02 0.03 0.04 0.05-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
Conv
erte
r Cur
rent
s Ia
bc [p
.u.]
Ia
Ib
Ic
0.01 0.02 0.03 0.04 0.05
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Time [sec]
d-cu
rrent
act
ual [
p.u.
]
d current actual
0.01 0.02 0.03 0.04 0.05
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [sec]
q-cu
rrent
act
ual I
q [p
.u.]
q current actual

32 | P a g e
injection into grid. The d-q current components of grid also show the faster response with
proper decoupling over conventional controller to improve the grid dynamics.
2.5 CONCLUSIONS
This provides an analytical background of the active and reactive power control strategy
for a grid connected inverter system. In this method independent control of the active and
reactive power was realized in an effective way. It also includes an improved current
harmonics compensation capability through the use of MRF PI controller. Comparative
studies made in the text have shown that the MRF PI controller provides better performance
in terms of improvement of grid dynamics as compared to the conventional controller. The
agreement with the simulation results to a prodigious extent with a good sinusoidal grid
current, a lesser harmonic component was also obtained by MRF PI controller.

33 | P a g e
CHAPTER 3
Decoupled Control Strategy of
Grid interactive Inverter System

34 | P a g e
3.1 INTRODUCTION
A control strategy for a three-phase grid connected voltage source inverter that links a
renewable energy source to the grid through an optimized LCL-type filter so as to attenuate
the current harmonics in the grid is shown. This approach uses a modified set of variables that
removes the non-linearity of the original set of equations. This linear system has been
decoupled into two different control loops corresponding to the active and reactive power
control. The active power loop is controlled by the dc link energy rather than dc link voltage
and the reactive power loop is controlled by the reactive component of the grid current.
Perfect decoupling can be obtained by the proper design of the control structure. The major
advantage of having two decoupled loops is the neutralization of undesirable transients of
reactive current caused by changes of active power and vice versa. Also, the start-up
transients are minimized by the use of additional terms in the control structure.
3.2 MATHEMATICAL MODELING OF THE THREE PHASE GRID
CONNECTED INVERTER
The schematic diagram of three phase grid-connected PWM inverter is shown in Fig.3.1,
which consists of dc link capacitor, IGBT switches and filter circuit in the grid side.
PHOTO-VOLTAIC
(PV) PANEL
Va
Vb
Vc
L1
C2
Rd
C2 C2
C1
Pin
v
Vc2
+
-
+
-
RdRd
L1
L1
L2
L2
L2
RENEWABLE ENERGY
SOURCE2- LEVEL PWM VSI
LCL FILTER
UTILITY GRID
DC LINK
Fig. 3.1. Schematic Diagram of Three Phase Grid Connected Inverter with LCL-type Filter

35 | P a g e
Assume that the three phase loop resistance R and L are of the same value and affection
of distribution parameters are negligible. Based on the topology, the dynamic equation of the
output side of the grid connected inverter in the dq frame can be deduced as follows:
cdcdqd vvuiL
dt
diL 11
cqcqd
qvvuiL
dt
diL 11
gddcq
cd iivCdt
dvC 22
gqqcd
cqiivC
dt
dvC 22
(3.1)
gdcdgq
gdvviL
dt
diL 22
cqgd
gqviL
dt
diL 22
ingdgd
c
c pivdt
dvvC 1
The dqtransformation has been made taking the grid voltage angle as the reference. The
system is a multivariable nonlinear system of order seven.
3.3 CONTROL STRATEGY OF THE THREE PHASE GRID CONNECTED
INVERTER
The main objectives of implementing this control strategy are to control the active and
reactive power injection to the grid independently and to maintain pure sinusoidal form of
grid current.
As seen, the system is a multivariable nonlinear system and the reactive power is
controlled by the reactive part of grid current whereas the active power control is done taking
the dc-link energy. In this paper, the decoupling terms and controller design are accomplished

36 | P a g e
without any approximation. As a result of which the performance of the system is not affected
by the switching frequency. The decoupling is done by the introduction of a new control
variable ηqwhich follows the equation
qL = qv +
diL +qiL (3.2)
From (1) we can find the values of 2
2
,dt
id
dt
di gqgq and 3
3
dt
id gq as
),(2
cqgd
cq
gd
gqviA
L
vi
dt
di (3.3)
)(1
)(2222
2
2
2
gqqcdgdcdgq
gqii
LCv
Lvv
Li
dt
id
),,,(2
)( 2
1
22
2
1
2
gdqcdgqqgdcdgp viviBivL
vL
i
(3.4)
)(
1)(
12).(
1
2
1
222
2
1
2
3
3
cqcqidgddcq
cq
gd
gqvvu
Lii
Cv
LL
vi
dt
id
qcqdcqgd vuL
iviC
1
2
1),,( (3.5)
gqqqqqq iaAaBa 012 (3.6)
where 22
2
1 1 CL and ηqis the input signal. We get that from ηq to the reactive current igqthe
system is decoupled and linearized. The open loop transfer function is given by
qqqq
gq
asasass
sI
01
2
2
3
1
)(
)(
(3.7)
Taking qa2 = 3 , qa1 = 23 and qa0 = 3 the closed loop transfer function results in
q
q
ref
gq
gq
kss
k
sI
sI
3)()(
)(
(3.8)
wherekqis the controller gain.

37 | P a g e
The control law can thus be derived from the above:
gq
gqgq
cq
gq
q
ref
q
c
q idt
di
dt
idvu
Ldt
iddtii
v
Lu 32
2
2
1
2
1
3
3
2
1
1 33)(
(3.9)
Similar equations can be derived for the active power control loop. Basing on feedback
technique we find the values of 3
3
2
2
,,dt
wd
dt
wd
dt
dw ccc and 4
4
dt
wd c from (3.1).
),( ingdingdgdc piDpiv
dt
dw (3.10)
))(1
(2
2
2
gdcdgqgd
c vvL
ivdt
wd
),,(1 2
22
gdcdgqgdcd
gd
gqgd vviEvL
vL
viv (3.11)
))(1
()1
(222
3
3
gddcq
gd
cqgdgd
c iiC
vL
vv
Liv
dt
wd
),,(2
)( 2
1
2
2
1
2
dcqgddgdcq
gd
gdgd iviFivvL
viv
(3.12)
))(1
(2
))(1
()(222
2
1
2
4
4
gqqcd
gd
gdcdgqgd
c iiC
vL
vvv
Liv
dt
wd
))(1
(1
2
1 cddqgd vvL
iv
qgdcd
gdgd
gqgd ivvLL
vLvLiv 2
1
21
2
121
2
1
2
2
1
2 3)3(
)3(

38 | P a g e
cd
gd
gd vuL
vv
L 1
2
12
2
2
1
2 )(
cd
gd
gdqcdgq vuL
vviviG
1
2
1),,,(
cdddddd waDqEaFa 0123 (3.13)
Here it has been assumed that the input power pin remains constant and thus the derivative
of the same has been neglected. The open loop transfer function can thus be given by
ddddd
cd
asasasass
sWsG
01
2
2
3
3
4
1
)(
)()(
(3.14)
With the selection of 4
0
3
1
2
23 ,4,6,4 dddd aaaa this can be simplified to
4)(
1
)(
)()(
ss
sWsG
d
c
d (3.15)
With the help of an integral controller sksC dd )( , the closed loop transfer function results in
d
d
ref
c
C
kss
k
sW
sW
4)()(
)(
(3.16)
The coefficients are selected to place the poles at desired location and thus obtaining
desirable transient response.
The control law can hence be written as:
c
ccc
cd
gdc
c
ref
c
gdc
d wdt
dw
dt
wd
dt
wdvu
L
v
dt
wddtww
vv
Lu 43
2
2
2
3
1
2
1
4
4
2
1
1 464)(
(3.17)

39 | P a g e
The start-up control is done by some modifications to the existing controller which isn’t
shown here for brevity.
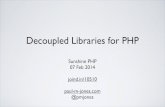
The control system block diagram for the LCL-type converter has been shown in Fig. 3. 2.
It can be seen that the terms above are a linear combination of the system state variables and
there are no time derivatives involved.
kq/s
Nβ
4
4Nβ
3
4Nβ N
M
Mβ
3
3Mβ
2
3Mβ
M
6Nβ
2
BLACKBOX OF THE
CONVERTER AS WELL AS THE FILTER
kq/s -N
uq
ud
Ioq
Iod
D E F G
A B C
vc
vc
Igq
wc
wcref
iqref
M=L1/ω2
N=L1/Vgdω12
ηq
ηd
+_
+ + +
_ _ _
++
÷
÷+ + + + + +_ _ _ _ _ +
igq
wc1/2C(.)2+
_
+_
Fig. 3.2. Control System block diagram of the LCL -type converter
3.4 RESULTS AND DISCUSSIONS
A 3 kW solar PV model connected to the three phase grid connected inverter system is
considered for the study and is simulated in MATLAB/Simulink environment.Table 3.1 gives
the design parameters for the control method.
TABLE 3.1
DESIGN PARAMETERS FOR CONTROL ALGORITHM
Parameters Value
Rated power P 3 kW
Rated voltage V 230 V
Grid frequency fo 50 Hz
Switching frequency fsw 20 kHz
DC Link Voltage Vdc 500 V
Resonant frequency fr 1 kHz
Modulation Index Ma 0.8

40 | P a g e
The simulation scenario has been defined as follows: the system has been given a full
irradiation of 1 kW at the beginning which drops down to 600 W at t=0.05 sec and the
reactive current step change from 0 A to 20 A is done at t=0.1 sec. Fig. 4 shows the graphs for
the grid current components id and iq, the dc-link capacitor voltage Vdc and the grid current
waveforms, Iabc. It is seen that the dc-link voltage is regulated to 500 V with small transients
at the change instants.
(a)
(b)
(c)
Fig. 3.3. (a) dc-link voltage across the capacitor (b) d and q axis current (c) Grid current waveforms
0 0.025 0.05 0.075 0.1 0.125 0.15 0.175495
496
497
498
499
500
501
502
503
504
505
Time (in sec)
Vca
pa
cito
r (in
V)
0 0.05 0.1 0.15 0.2-5
0
5
10
15
20
25
Time (in sec)
Idq
(in
A)
Id
Iq
0 0.05 0.1 0.15 0.2-15
-12
-9
-6
-3
0
3
6
9
12
15
Time (in sec)
Iab
c(
in A
)
Ia
Ib
Ic
0.05
499
499.5
500
500.5
501
Time (in sec)
Vca
pa
cito
r (
in V
)
0.075 0.1 0.125
497.5
498
498.5
499
499.5
500
500.5
501
501.5
502
Time (in sec)
Vca
pa
cito
r (in
V)

41 | P a g e
It is seen that the controller shows desirable performance with decoupled active and
reactive power flow. The reactive current follows the desired response when a step change is
introduced with fewer transients in the dc-link voltage.
3.5 CONCLUSIONS
Here, a control scheme for a three-phase grid-connected inverter with an LCL-type filter
has been investigated. For the inverter system, the control method has been given to
accurately formulate the decoupling terms for LCL-type filter. The decoupling method
obviates the need for incorporating additional filters to compensate for instabilities which are
caused by approximate decoupling done in high switching frequencies. The agreement with
the simulation results to a prodigious extent with a good sinusoidal grid current, a lesser
harmonic component was also obtained.

42 | P a g e
CHAPTER 4
Filter Design using Power Loss
Calculations

43 | P a g e
4.1 INTRODUCTION
An inverter generally introduces higher order harmonics into the grid system due to
nonlinear characteristics of the inverter switches. In order to attenuate these introduced
harmonics an LCL-type filter is connected in series with the inverter on the grid side. It makes
sure that the harmonic content is below a specified limit. However, in addition to it the filter
causes extra power losses which are undesirable. Here, the LCL-type filter is chosen over L-
type and LC-type due to its better harmonic attenuation properties for the same value of
inductances [15]. However, a resonance problem is present which can be mitigated by using
different damping methods.
Here a passive damping method has been adopted to eliminate the resonance problem in
here, a resistor and a capacitor has been added in parallel to the original capacitor as shown in
fig. 3. It is known that for grid connected applications a passive method is more appropriate,
as when the inverter is switched off while grid is still on the ON condition, the resistor that is
used helps in protecting the system.
UgUi
C1 Cd
L1 L2
i 1 I g
Uc
Id
Rd
Fig. 4.1.LCL-type filter with passive damping scheme
4.2 FILTER DESIGN
Here, the filter has been designed considering the THD% of the current waveform and
losses. It is known that the THD% would be higher for lower values of L and conduction

44 | P a g e
losses would be higher for higher value of filter. Hence, the trade-off between them gives the
optimal value of inductor to be used in the filter design. Power losses are adopted from [13].
The optimal value of inductance obtained is divided into L1 and L2 in such a way that the
capacitance obtained should be minimal and it occurs when L1 is a little higher than L2, since
the harmonics in the current entering L1 is higher than that in L2.
We can say, 21 LLL (4.1)
where2
21
LLL (4.2)
We know, LC
r
42 (4.3)
The resonant frequency (ωr) should be in the range of 10 ωo<ωres< (ωsw/2) in order to reduce
resonance problems and a constant value in this range is selected.
Capacitor value can be obtained by
LC
r
2
4
(4.4)
where dCCC 1 (4.5)
When quality factor and power losses are considered, the effective damping occurs when
C1 and Cd are equal. The resistance (Rd) of damping circuit is obtained as follows
C
LRd (4.6)
4.2.1 Inductor Power Loss:
Power losses in an inductor are divided into core loss and copper loss. There are some
additional losses which are negligible. So both core and copper losses at fundamental and
switching frequencies are calculated using software called Magnetic Design. As input we give
inductor value, peak to peak current and rms current.

45 | P a g e
4.2.2 Damping Circuit and Capacitor:
Power losses of the damping circuit can be calculated as follows:
A. Fundamental frequency power loss:
It is calculated at the fundamental frequency of 50 Hz. At fundamental frequency,
thevoltage across the damping circuit (Uc) is same as that of grid voltage. Therefore, gc UU
Power loss can be calculated from
)50(dP Real ][ *
dc IU (4.7)
where, Id is current flowing through damping circuit and can be derived as follows,
31 RsC
sCUI
d
dcd
(4.8)
2
3
22
50
35050
1
)1(
RC
RCjCjUI
d
ddcd
(4.9)
2
3
22
50
3
22
50
2
)50(1 RC
RCUP
d
dcd
(4.10)
B. Switching frequency power loss:
Grid is considered as a short circuit at the switching frequency but it is an ideal voltage at
fundamental frequency. So at switching frequency Ug=0,
)1
11()1(
5.05.0
2
2
32
2
3
cr
swdsw
r
sw
dswic
aRCj
RCjUU
(4.11)
2
3
22
3
1
)(
RC
jRCCUI
dsw
dswdswcd
(4.12)
)(swdP ][ *
dc IU (4.13)
Representing Ucand Id as complex fractions,

46 | P a g e
jdc
jbaUU ic
(4.14)
)(1 222
jyxRC
CUI
ddsw
dswcd
(4.15)
*
2
3
22
** )(1
)( jyxRC
C
jdc
jbaU
jdc
jbaUIU
dsw
dswiidc
(4.16)
)(swdP Real xRC
C
dc
baUIU
dsw
dswidc 2
3
2222
22*
1][
(4.17)
Here, 5.0a , 35.0 RCb dsw , 2
2
1r
swc
, )
1
11(
2
2
3
cr
swdsw
aRCd
, 3RCx dsw , 1y
4.3 RESULTS AND DISCUSSIONS
The fundamental copper loss, iron loss and the switching core loss and the copper loss were
all calculated and are shown in Table 4.1.
TABLE 4.1
LOSSES AT DIFFERENT INDUCTANCE VALUES
L
Switching
Losses
Fundamental
Losses At
fundamental
frequency
At switching
frequency Total losses Copper
Loss
Core
Loss
Copper
Loss
Core
Loss
0.001 0.223 0.055 0.042 0.042 1.5700 628 629.3620
0.003 0.071 0.055 0.118 0.055 0.5200 209 210.1990
0.005 0.041 0.055 0.191 0.055 0.3100 125.60 126.242
0.007 0.029 0.055 0.294 0.055 0.2200 89.7000 90.3330
0.008 0.024 0.055 0.313 0.061 0.1960 78.5000 78.9530
0.009 0.021 0.055 0.351 0.061 0.1740 69.7900 70.2780
0.01 0.019 0.055 0.417 0.061 0.1570 62.8191 63.5282
0.02 0.031 0.040 0.511 0.149 0.0785 31.4096 32.2191
0.03 0.021 0.040 0.777 0.186 0.0523 20.9397 22.0161
0.04 0.016 0.040 0.993 0.215 0.0393 15.7048 17.0080
0.05 0.012 0.040 1.033 0.290 0.0314 12.5638 13.9702
0.06 0.010 0.040 1.016 0.322 0.0262 10.4699 11.8848
0.07 0.007 0.040 1.850 0.275 0.0224 8.97420 11.1686
0.08 0.007 0.040 1.847 0.330 0.0196 7.85240 10.0960
0.09 0.005 0.040 1.814 0.330 0.0174 6.97990 9.1864
0.1 0.005 0.040 1.689 0.479 0.0157 6.28190 8.5106

47 | P a g e
The plot between the total losses and the value of inductor is given in Fig. 4.2.
Fig. 4.2.Total Power loss vs Inductance value
It is seen that both the core loss and the copper loss of the inductor at the switching
frequency has a very high value at lower inductance and it decreases with increase in the
inductor values; whereas the losses at fundamental frequency increase with the rise in
inductor value. Hence, the total losses due to the inductor increase with an increase in
inductance value as seen from the Fig. 5.and a lower inductance is to be selected so that the
losses are optimized.
Fig. 4.3. Plot between THD% and Power Losses vs pu value of inductance
When the damping circuit losses are studied, it is observed that at the lower inductor
values, losses are higher than that present, at higher inductor values. Fig. 6 shows the plot of
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
100
200
300
400
500
600
700
L(pu)
Tot
al p
ower
loss
es
(in
wat
t)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
10
20
30
Inductance (in pu)
TH
D %
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
500
1000
THD%
Power Loss

48 | P a g e
total losses and the THD of current waveformvs the inductor value. It is seen that at lower
value of inductance the total losses off whole filter is very high. The point of intersection
provides the optimal value of the inductor where a tradeoff has been made between the losses
and the THD% of current waveform
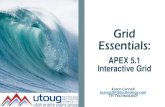
Fig. 4.4. Harmonic waveform of the grid current at optimum inductor values
The optimized value of inductance can be found from the above figure which comes out to
be 0.0135 p.u. which comes out to be 2.226 mH. Fig. 7 shows the value of THD% of the grid
current. It is seen that the THD% is 1.99% which is well within the limit of 5% from
L1=2.268 mH. L2is chosen to be a bit less than L1 and it comes out to be 0.988 mH. The
optimal values of the capacitor is then calculated from (21) by taking the effect of both the
losses and the capacity of filter and have been shown in table 2. At the same time, the one
with lower THD% is given prime consideration.
TABLE 4.2
DESIGN PARAMETERS OF LCL-TYPE FILTER
Parameters Value
L1 1.28 mH
L2 0.988 mH
C1 22.337 uF
Cd 22.337 uF
Rd 7.1251 ohms
Losses 52.198 W
THD% 1.99 %
0 0.01 0.02 0.03 0.04 0.05 0.06
-50
0
50
Selected signal: 3 cycles. FFT window (in red): 1 cycles
Time (s)
0 2 4 6 8 10 12 14 16 18 200
1
2
3
4
5
6
Harmonic order
Fundamental (50Hz) = 74.55 , THD= 1.99%
Mag
(%
of
Fu
nd
am
en
tal)

49 | P a g e
4.4 CONCLUSIONS
Here, it is seen that the filter design is done by a trade-off between the THD% and the
total losses, and thus provides the optimal values for the filter design. Simulation results
verify the effectiveness of the system. The agreement with the simulation results to a
prodigious extent with a good sinusoidal grid current, a lesser harmonic component was also
obtained by the optimization done by the filter design.

50 | P a g e
CHAPTER 5
Conclusions

51 | P a g e
5.1. CONCLUSIONS
Here, a control scheme for a three-phase grid-connected inverter with an LCL-type filter
has been investigated. For the inverter system, the control method has been given to
accurately formulate the decoupling terms for LCL-type filter.
An analytical background of the active and reactive power control strategy for a grid
connected inverter system is provided.
In this method independent control of the active and reactive power was realized in an
effective way.
It also includes an improved current harmonics compensation capability through the use
of MRF PI controller.
Comparative studies made in the text have shown that the MRF PI controller provides
better performance in terms of improvement of grid dynamics as compared to the
conventional controller.
The agreement with the simulation results to a prodigious extent with a good sinusoidal
grid current, a lesser harmonic component was also obtained by MRF PI controller.
For the inverter system, the control method has been given to accurately formulate the
decoupling terms for LCL-type filter.
It is also seen that the filter design is done by a trade-off between the THD% of grid
current and the total losses, and thus provides the optimal values for the filter design.
Simulation results verify the effectiveness of the system.
The agreement with the simulation results to a prodigious extent with a good sinusoidal
grid current, a lesser harmonic component was also obtained by the optimization done by
the filter design.

52 | P a g e
References
[1] F.Blaabjerg, R. Teodorescu, M. Liserre, A.V.Timbus, , "Overview of Control and
Grid Synchronization for Distributed Power Generation Systems," IEEE Transactions
on Industrial Electronics, , vol.53, no.5, pp.1398-1409, Oct. 2006
[2] Anurag, A.; Babu, B.C.; , "Control of Grid Connected Inverter system for sinusoidal
current injection with improved performance," In Proc. 2012 IEEE Students’
Conference on Engineering and Systems, 2012, pp.1-6, 16-18 March 2012
[3] J. Dannehl, C.Wessels, and F. Fuchs, “Limitations of voltage-oriented PI current
control of grid-connected pwm rectifiers with filters,” IEEE Trans. Ind. Electron., vol.
56, no. 2, pp. 380–388, Feb. 2009.
[4] T.CY.Wang, Z.Ye, G.Sinha, X.Yuan, "Output Filter Design for a Grid-interconnected
Three-Phase Inverter, "Conference Records on PESC'03, vol.2, pp.779-784, June
2003.
[5] Jae-Seok Noh, Jaeho Choi, "Design of Voltage Source PWM Converter with AC
Input LCL Filter", Journal of Power Electronics, The Korean Institute of Power
Electronics, vol.7, no.5, pp.490-498, October 2002 (Korean)
[6] E.M.Adzic, D.P.Marcetic, V.A.Katic, V.A.; M.S. Dzic, "Grid-connected Voltage
Source Converter operation under distorted grid voltage," 2010 14th
International Power Electronics and Motion Control Conference (EPE/PEMC), vol.,
no., pp.T11-44-T11-51, 6-8 Sept. 2010

53 | P a g e
[7] Hong-Seok Song; Kwanghee Nam; , "Dual current control scheme for PWM
converter under unbalanced input voltage conditions," IEEE Transactions
on Industrial Electronics, vol.46, no.5, pp.953-959, Oct 1999.
[8] Ma Liang, T.Q. Zheng, "Synchronous PI control for three-phase grid-connected
photovoltaic inverter," 2010 Chinese Control and Decision Conference
(CCDC), pp.2302-2307, 26-28 May 2010.
[9] Ranjan Ku. Behera, WenzhongGao, “ A Novel Controller Design for Grid-side
Converter of Doubly Fed Induction Generator for Wind Power Interface: An
Experimental Investigation”, International Journal of Electric Power Components
and Systems Vol. 38, Issue. 14, 2010.
[10] M. Liserre, F. Blaabjerg, S. Hansen, and D. di Elettrotecnica, “Design and control of
an lcl-filter-based three-phase active rectifier,” IEEE Trans. Ind. Appl., vol. 41, no. 5,
pp. 1281–1291, Sep./Oct. 2005.
[11] E. Wu and P. Lehn, “Digital current control of a voltage source converter with active
damping of LCL resonance,” IEEE Trans. Power Electron., vol. 21, no. 5, pp. 1364–
1373, Sep. 2006.
[12] Khajehoddin, S.A.; Karimi-Ghartemani, M.; Jain, P.K.; Bakhshai, A.; , "A Control
Design Approach for Three-Phase Grid-Connected Renewable Energy Resources",
IEEE Transactions onSustainable Energy, vol.2, no.4, pp.423-432, Oct. 2011
[13] Channegowda, P.; John, V.; , "Filter Optimization for Grid Interactive Voltage Source
Inverters," Industrial Electronics, IEEE Transactions on , vol.57, no.12, pp.4106-
4114, Dec. 2010
[14] Xiyou Chen, DianguoXu, Fengchun Liu, Jianqiu Zhang, "A Novel Inverter-Output
Passive Filter for Reducing Both Differential- and Common-Mode dv/dt at the Motor

54 | P a g e
Terminals in PWM Drive Systems," Trans. on Industrial Electronics, vol. 54, no. 1,
pp. 419-426, Feb. 2007.
[15] Debati Marandi, Naga Sowmya Tontepu, B.Chitti Babu, ” Comparative Study
between Unipolar and Bipolar Switching Scheme with LCL Filter for Single-Phase
Grid Connected Inverter System”, Proc. of IEEE Students’ Conference on Electrical,
Electronics and Computer Sciences 2012 (SCEECS 2012), MANIT, Bhopal,
Mar/2012.
[16] F.A. Magueed, ; A.Sannino, J. Svensson, J.; , "Transient performance of voltage
source converter under unbalanced voltage dips", 2004 IEEE 35th Annual Power
Electronics Specialists Conference, PESC 2004 , vol.2, no., pp. 1163- 1168 Vol.2, 20-
25 June 2004.
[17] Hanju Cha; T.K.Vu, "Comparative analysis of low-pass output filter for single-phase
grid-connected Photovoltaic inverter," Proc, of 2010 Twenty-Fifth Annual IEEE
Applied Power Electronics Conference and Exposition (APEC), , vol., no., pp.1659-
1665, 21-25 Feb. 2010.
[18] M.N.N.Amin, O.A.Mohammed, O.A., "Vector oriented control of voltage source
PWM inverter as dynamic VAR compensator for wind energy conversion system
connected to utility grid”, Proc. of 2010 25th
IEEE Applied Power Electronics
Conference (APEC), pp.1640-1650, Feb-2010.
[19] T.C.Y. Wang, Xiaoming Yuan; , "Design of multiple-reference-frame PI controller for
power converters,", Proc. of 2004 IEEE 35th Annual Power Electronics Specialists
Conference, Vol.5, no., pp. 3331- 3335 , 20-25 June 2004.

55 | P a g e
PAPERS PUBLISHED
1. Anup Anurag, T.Naga Sowmya, Debati Marandi, B.Chitti Babu,” Decoupled
Control Strategy of Grid Interactive Inverter System with Optimal LCL Filter
Design”, International Journal of Emerging Electric Power Systems (IJEEPS), UC
Berkeley Press, (Paper ID: IJEEPS.2013.0015)- Under review
2. Anup Anurag, B.Chitti Babu, ” Control of Grid Connected Inverter System for
Sinusoidal Current Injection with Improved Performance”, In Proc. IEEE Students’
Conference on Engineering & Systems (SCES 2012), MNNIT, Allahabad,
Mar/2012.