Daamen r 2010scwr-cpaper
30
Development of Inferential Sensors for Real - time Quality Control of Water - Level Data for the Everglades Depth Estimation Network Ruby Daamen, Advanced Data Mining Int’l Edwin Roehl, Advanced Data Mining Int’l Paul Conrads, USGS – SC Water Science Center Matthew Petkewich, USGS – SC Water Science Center
-
Upload
john-b-cook-pe-ceo -
Category
Environment
-
view
20 -
download
0
Transcript of Daamen r 2010scwr-cpaper
Development of Inferential Sensors for
Real-time Quality Control of Water-
Level Data for the Everglades Depth
Estimation Network
Ruby Daamen, Advanced Data Mining Int’l
Edwin Roehl, Advanced Data Mining Int’l
Paul Conrads, USGS – SC Water Science Center
Matthew Petkewich, USGS – SC Water Science Center

Presentation Outline
• What is an “Inferential Sensor” (IS)?
• Background - Industrial application
• Everglades Depth Estimation Network
(EDEN)
• Automated Data Assurance and
Management (ADAM) - Inferential Sensor
development for EDEN

Development of IS in Industry
• A tough environment to monitor
– Emissions regulations require measurements of
effluent gases
– Smoke stack burns up probes
– Need alternative to “hard” sensors

Hard Sensor vs. Inferential Sensor
• Virtual sensor replaces actual sensor
– Temporary gage smoke stack
– Operate plant to cover range of emissions
– Develop model of emissions based on
operations
– Model becomes the “Inferential Sensor”

Inferential Sensors for Real-Time Data
• Problem – Need to minimize missing and
erroneous data
• Use similar approach taken by industry to predict
real-time data – ie. “Inferential Sensors”
– QA/QC hard sensor
– Provide accurate estimates for hard sensor
– Provide redundant signal
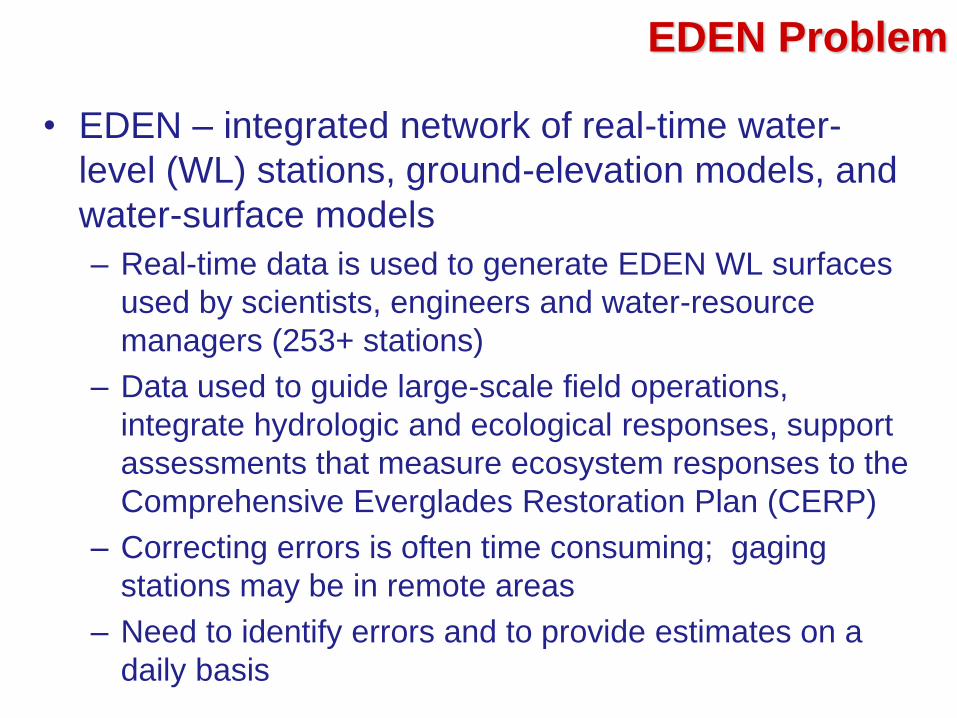
EDEN Problem
• EDEN – integrated network of real-time water-
level (WL) stations, ground-elevation models, and
water-surface models
– Real-time data is used to generate EDEN WL surfaces
used by scientists, engineers and water-resource
managers (253+ stations)
– Data used to guide large-scale field operations,
integrate hydrologic and ecological responses, support
assessments that measure ecosystem responses to the
Comprehensive Everglades Restoration Plan (CERP)
– Correcting errors is often time consuming; gaging
stations may be in remote areas
– Need to identify errors and to provide estimates on a
daily basis
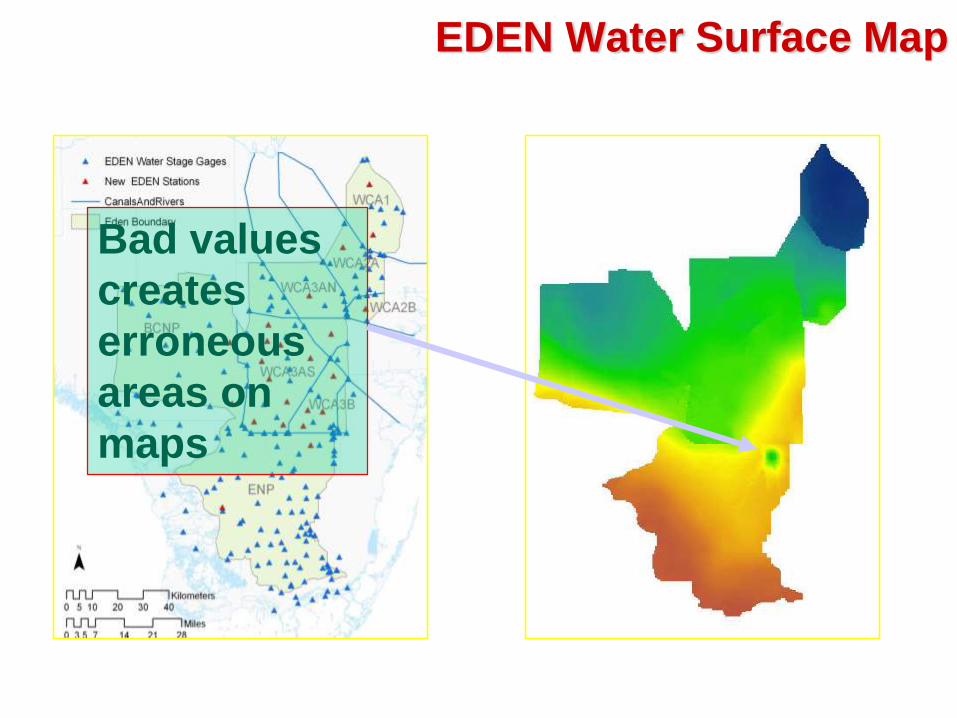
EDEN Water Surface Map
Bad values
creates
erroneous
areas on
maps

EDEN / ADAM Overview
Inferential Sensor
application

Some of the Challenges
• 253+ gaging stations
• Inferential sensor uses data from one or
more correlated gages. At any given
datetime do not know what stations will have
available data
• Stations added/removed over time

Implementation
• Create models “on the fly”
– Use “best” available stations
– Simplifies addition / removal of stations
• Needs to consider
– Assessment of data – prevent use of suspect
data in models
– Model inputs need be decorrelated

Methods
• Two algorithms sequenced to analyze data
– Univariate filtering
• Provides information about the quality and behavior
for each stations WL
• A Statistical Process Control (SPC) which consists of
14 univariate filters – uniquely set for each station
– Estimate parameter value
• Select a “pool” of candidate gaging stations using
matrix of Pearson coefficients
• Principal component analysis (PCA) – calculates
decorrelated inputs
• Multivariate linear regression
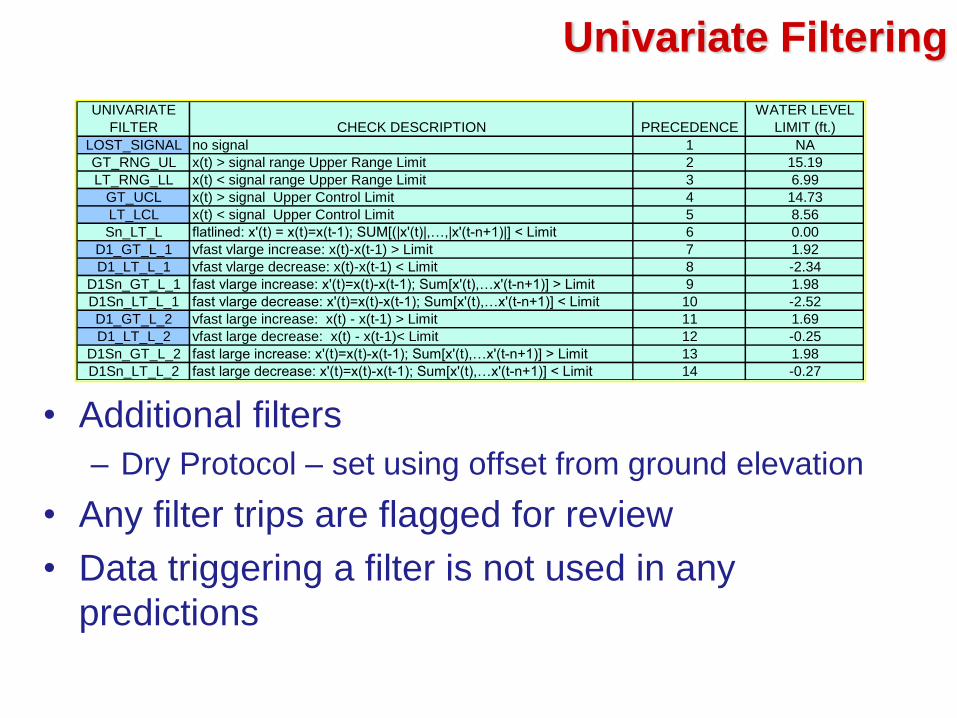
Univariate Filtering
UNIVARIATE
FILTER CHECK DESCRIPTION PRECEDENCE
WATER LEVEL
LIMIT (ft.)
LOST_SIGNAL no signal 1 NA
GT_RNG_UL x(t) > signal range Upper Range Limit 2 15.19
LT_RNG_LL x(t) < signal range Upper Range Limit 3 6.99
GT_UCL x(t) > signal Upper Control Limit 4 14.73
LT_LCL x(t) < signal Upper Control Limit 5 8.56
Sn_LT_L flatlined: x'(t) = x(t)=x(t-1); SUM[(|x'(t)|,…,|x'(t-n+1)|] < Limit 6 0.00
D1_GT_L_1 vfast vlarge increase: x(t)-x(t-1) > Limit 7 1.92
D1_LT_L_1 vfast vlarge decrease: x(t)-x(t-1) < Limit 8 -2.34
D1Sn_GT_L_1 fast vlarge increase: x'(t)=x(t)-x(t-1); Sum[x'(t),…x'(t-n+1)] > Limit 9 1.98
D1Sn_LT_L_1 fast vlarge decrease: x'(t)=x(t)-x(t-1); Sum[x'(t),…x'(t-n+1)] < Limit 10 -2.52
D1_GT_L_2 vfast large increase: x(t) - x(t-1) > Limit 11 1.69
D1_LT_L_2 vfast large decrease: x(t) - x(t-1)< Limit 12 -0.25
D1Sn_GT_L_2 fast large increase: x'(t)=x(t)-x(t-1); Sum[x'(t),…x'(t-n+1)] > Limit 13 1.98
D1Sn_LT_L_2 fast large decrease: x'(t)=x(t)-x(t-1); Sum[x'(t),…x'(t-n+1)] < Limit 14 -0.27
• Additional filters
– Dry Protocol – set using offset from ground elevation
• Any filter trips are flagged for review
• Data triggering a filter is not used in any
predictions

Synthesize WL Measurements
• WL at candidate stations are correlated – no
surprise
• First approach examined selected the most
highly correlated station as a “standard”
signal and then attempted decorrelating the
other stations by computing differences from
the standard.

Principal Component Analysis (PCA)
• PCA is a statistical technique used to
“reduce the dimensionality of a data set
consisting of a large number of interrelated
variables, while retaining as much as
possible of the variation present in the data
set. This is achieved by transforming to a
new set of variables, the principal
components (PCs), which are uncorrelated,
and which are ordered so that the first few
retain most of the variation present in all of
the original variables” (Joliffe)

PCA – Main Points
• PCA - the main points
– Principal components are uncorrelated
– Transforms a set of correlated variables into a
smaller number of uncorrelated variables
– The first principal component (PC) accounts for
most of the variability in the data
PCA - Analysis
• PCA – a brief description of the analysis:
– Calculate the eigenvectors and eigenvalues of
the covariance matrix
• Create data set of n inputs with no gaps
• Subtract the mean from each n input
• Calculate the covariance matrix (square nXn matrix)
• Calculate eigenvectors
– Sort by eigenvalues (highest to lowest)
• Largest eigenvector = 1st principal component
• Use eigenvalues to determine how many PCs to
include

PCA – A 2-Dimension ExampleOriginal Data
(Mean Subtracted)
Eigenvectors Principal
Components
Eigenvectors
Plotted on
Data
-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
Normalized Data
E1
E2
Original Data

ADAM - Functionality
• Setup
– File paths
– PCA setup – period, number of sites to include
– Add / Edit / Remove sites
– Univariate filters
• Inferential Sensor – Option to analyze daily
(hourly and 15 minute data), quarterly and
annual (hourly) daily files
• Review results
• Output daily median files as required for
EDEN water surface map

ADAM – Control Worksheet
Select Daily, Quarterly or
Annual Run Analysis
Resume, redo OR continue from
last analyzed
Fill Setup
Remove , add, or edit sites
included in ADAM
Set Pathnames for files used
by ADAM
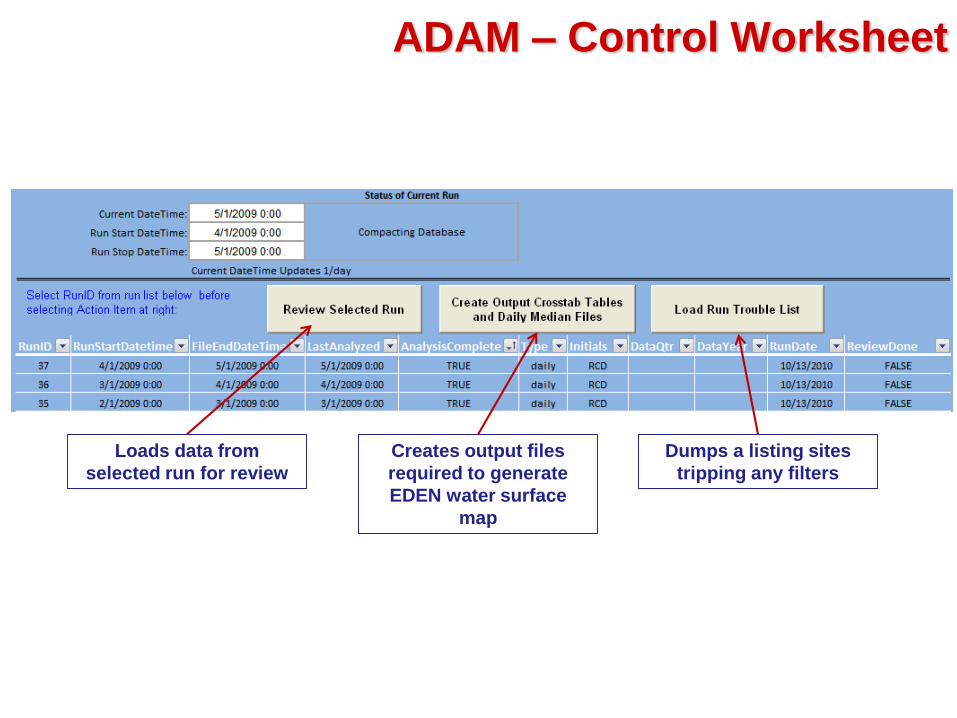
ADAM – Control Worksheet
Loads data from
selected run for review
Creates output files
required to generate
EDEN water surface
map
Dumps a listing sites
tripping any filters

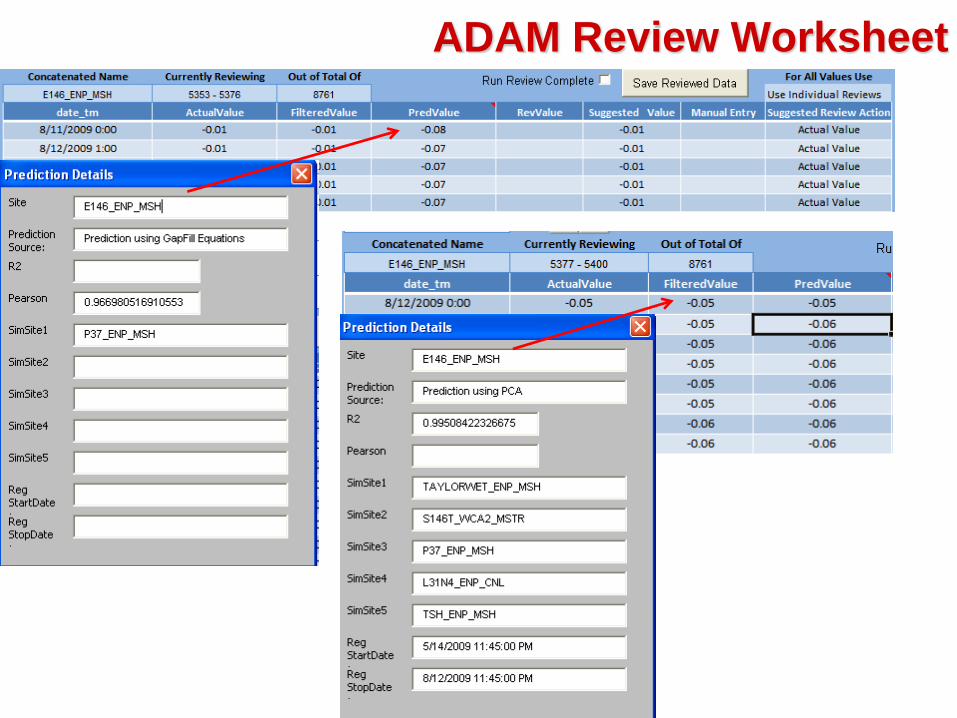
ADAM Review Worksheet
First PCA
analysis
GAPFILL
ADAM Review Worksheet
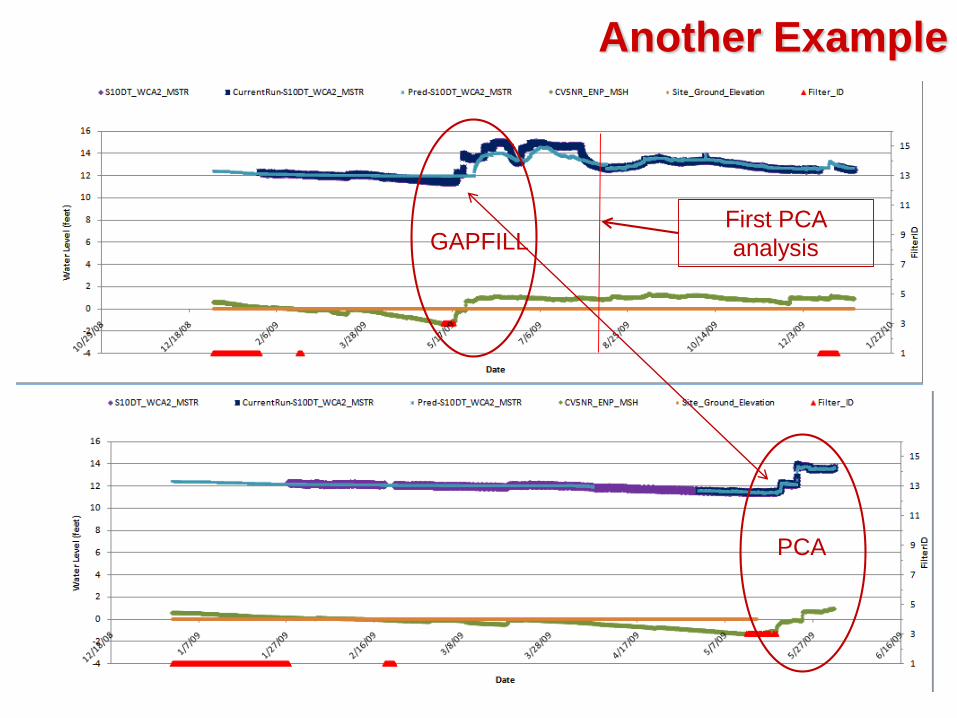
Another Example
GAPFILL
PCA
First PCA
analysis
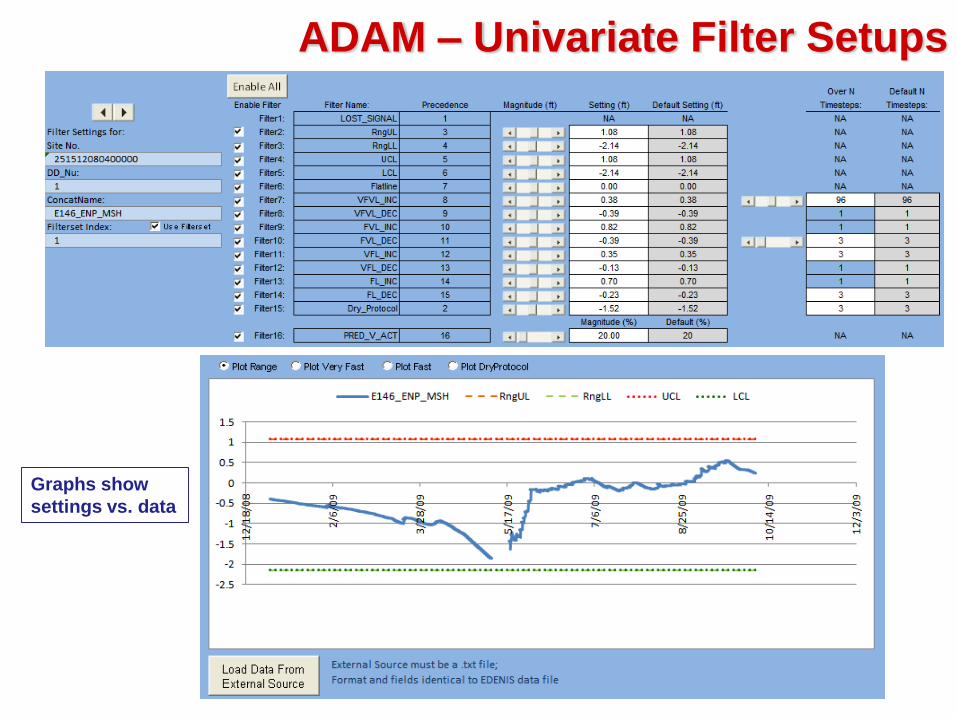
ADAM – Univariate Filter Setups
Graphs show
settings vs. data
What’s Next
EVEEvolution and Verification of EDEN Inferential Sensor
Questions?

Archive

PCA – The methodology
• From our favorite source -Wikipedia – PCA is:– A mathematical procedure that transforms a set of correlated variables into a smaller number of
uncorrelated variables. The first principal component accounts for as much of the variability in the data as possible and each succeeding component accounts for as much of the remaining variability as possible.
• How to do it: In the broadest sense it is an eigenvector based multivariate analysis. The methodology used is:
– Assemble the data• In EDENIS the data will be water level data from up to 5 gaging stations. For 90 days of hourly data this
equates to up to 2160 vectors (8640 for 15 minute data)
– Remove any vectors that contain any missing data (1)• Resulting matrix X[n,m] where n = number of fully populated vectors; m = number of gages included
– Subtract the mean from each of the data dimensions (m) – lets call this the normalized matrix B (2)
• B[n,m] stores mean-subtracted data
– Calculate the Covariance matrix (3)• Covariance matrix is a square matrix with dimension mXm: C[m,m]
– Calculate the eigenvalues and eigenvectors of the covariance matrix• This is an iterative process. If you want to look up some more on this I used the Jacobi eigenvalue
algorithm. Some important properties of eigenvectors:– Can only be found for square matrices. If a square matrix (mXm) does have eigenvectors, there are m of them– All the eigenvectors of a matrix are orthogonal to each other. This is important: when the data is expressed in terms of
these eigenvectors the resulting principal components are uncorrelated
• For a refresher course on eigenvalues / eigenvectors heres a link http://en.wikipedia.org/wiki/Eigenvalue,_eigenvector_and_eigenspace
– Sort the results: Largest eigenvalue to smallest eigenvalue. (4)– Decide how many components to keep and calculate the new data set to be used. This is a
simple matrix multiplication of B X E where E is the mXm eigenvector matrix. (5) • For the 10-12 sites I looked at when presenting the PCA results I would expect we’ll rarely if ever use more
than 2 principal components out of a possible 5 to make the regression predictions.
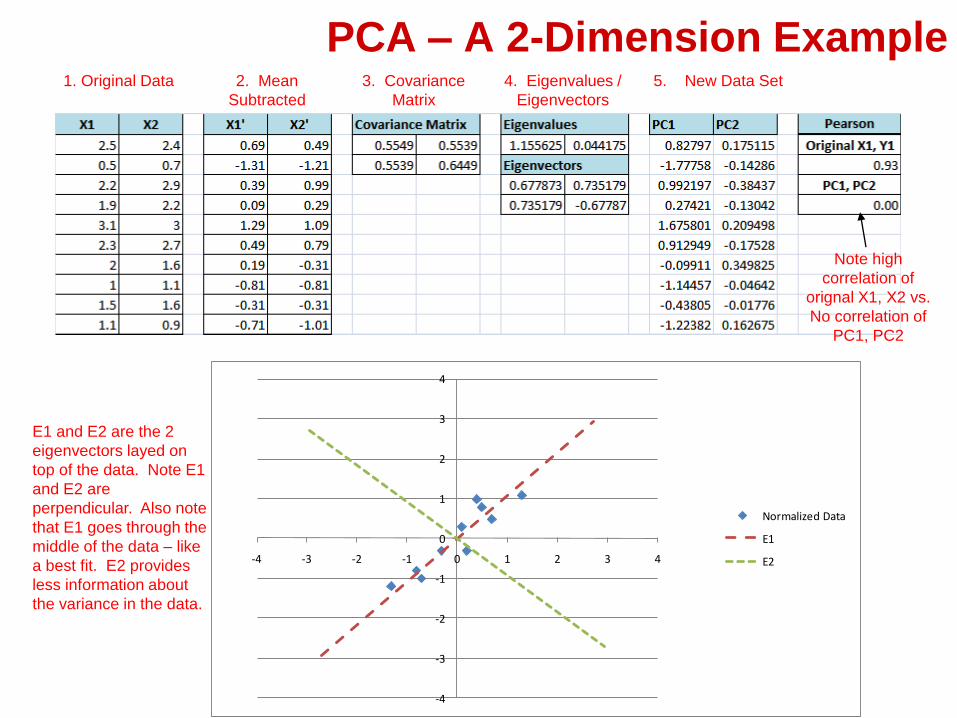
PCA – A 2-Dimension Example1. Original Data 2. Mean
Subtracted
3. Covariance
Matrix
4. Eigenvalues /
Eigenvectors
5. New Data Set
Note high
correlation of
orignal X1, X2 vs.
No correlation of
PC1, PC2
E1 and E2 are the 2
eigenvectors layed on
top of the data. Note E1
and E2 are
perpendicular. Also note
that E1 goes through the
middle of the data – like
a best fit. E2 provides
less information about
the variance in the data.
-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
Normalized Data
E1
E2

Challenges
• Develop 253+ models using artificial neural
networks (ANNs) (1 model per station)
– Pros
• authors have prior success modeling complex
processes using ANNs
• ANNs use non-linear curve fitting to capture complex
behaviors
– Cons
• Do not know what stations will have “good” data at
any given datetime
• Stations are removed and added

• Possibly insert Yearly run – min/max r2
using pca,gapfill