
CSE328 Fundamentals of Computer Graphics: …cse328/2012-lecture-notes/...ST NY BR K STATE...
52
STNY BRK STATE UNIVERSITY OF NEW YORK Department of Computer Science Center for Visual Computing CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications Hong Qin Department of Computer Science State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794-4400 Tel: (631)632-8450; Fax: (631)632-8334 [email protected] http://www.cs.sunysb.edu/~qin
Transcript of CSE328 Fundamentals of Computer Graphics: …cse328/2012-lecture-notes/...ST NY BR K STATE...

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications
Hong Qin
Department of Computer Science
State University of New York at Stony Brook (Stony Brook University)
Stony Brook, New York 11794-4400
Tel: (631)632-8450; Fax: (631)632-8334
http://www.cs.sunysb.edu/~qin
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D-3D Transformations
• From local, model coordinates to global, world
coordinates
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Modeling Transformations
• 2D-3D transformations
• Specify transformations for objects
– Allows definitions of objects in their own coordinate
systems
– Allows use of object definition multiple times in a
scene
– Please pay attention to how OpenGL provides a
transformation stack because they are so frequently
reused

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Overview
• 2D Transformations
– Basic 2D transformations
– Matrix representation
– Matrix composition
• 3D Transformations
– Basic 3D transformations
– Same as 2D

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
From Model Coordinates to World Coordinates (Local to Global)
CSE528 Lectures
x
yModel coordinates (local)
World coordinates (global)
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
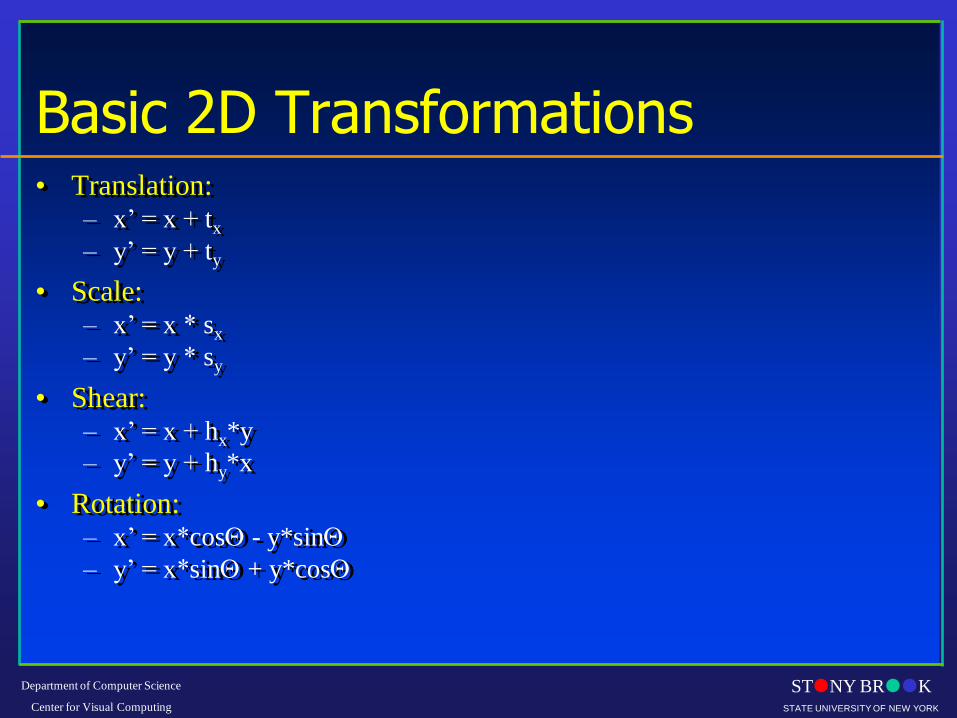
Basic 2D Transformations• Translation:
– x’ = x + tx
– y’ = y + ty
• Scale:
– x’ = x * sx
– y’ = y * sy
• Shear:
– x’ = x + hx*y
– y’ = y + hy*x
• Rotation:
– x’ = x*cosQ - y*sinQ
– y’ = x*sinQ + y*cosQ
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Scaling• Scaling a coordinate means multiplying each of
its components by a scalar
• Uniform scaling means this scalar is the same for all components:
• Non-uniform scaling: different scalars per component:
• How can we represent scaling in matrix form?

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Scaling Operation in Matrix Form
by
ax
y
x
'
'
y
x
b
a
y
x
0
0
'
'
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
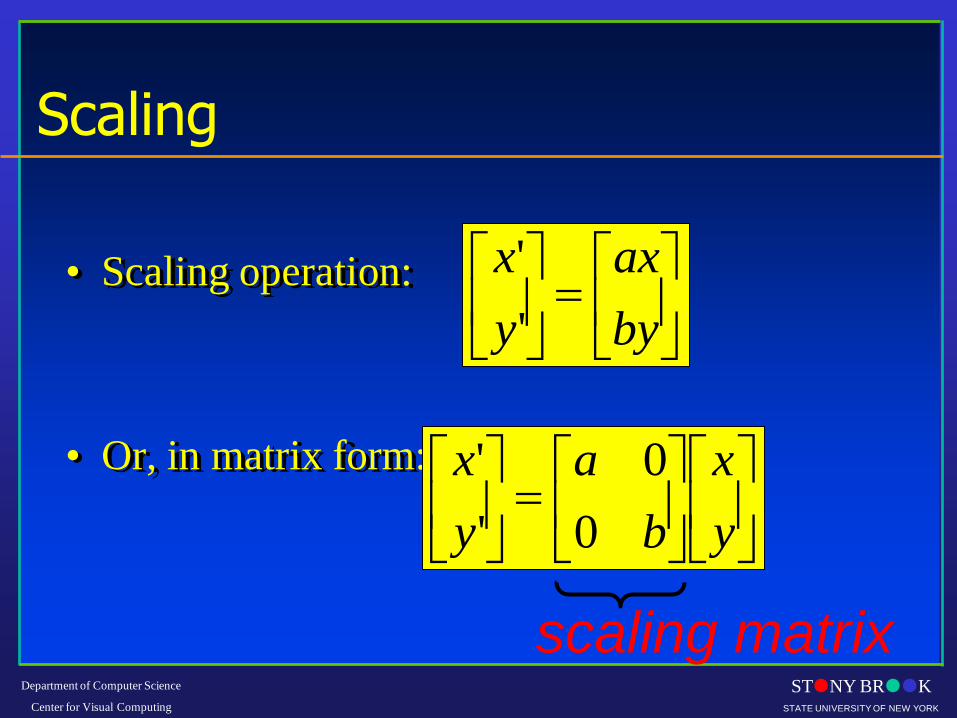
Scaling
• Scaling operation:
• Or, in matrix form:
by
ax
y
x
'
'
y
x
b
a
y
x
0
0
'
'
scaling matrix

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2-D Rotation
x’ = x cos() - y sin()
y’ = x sin() + y cos()

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D Rotation Derivation• x = r cos (f)
• y = r sin (f)
• x’ = r cos (f + )
• y’ = r sin (f + )
• x’ = r cos(f) cos() – r sin(f) sin()
• y’ = r sin(f) sin() + r cos(f) cos()
• x’ = x cos() - y sin()
• y’ = x sin() + y cos()

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
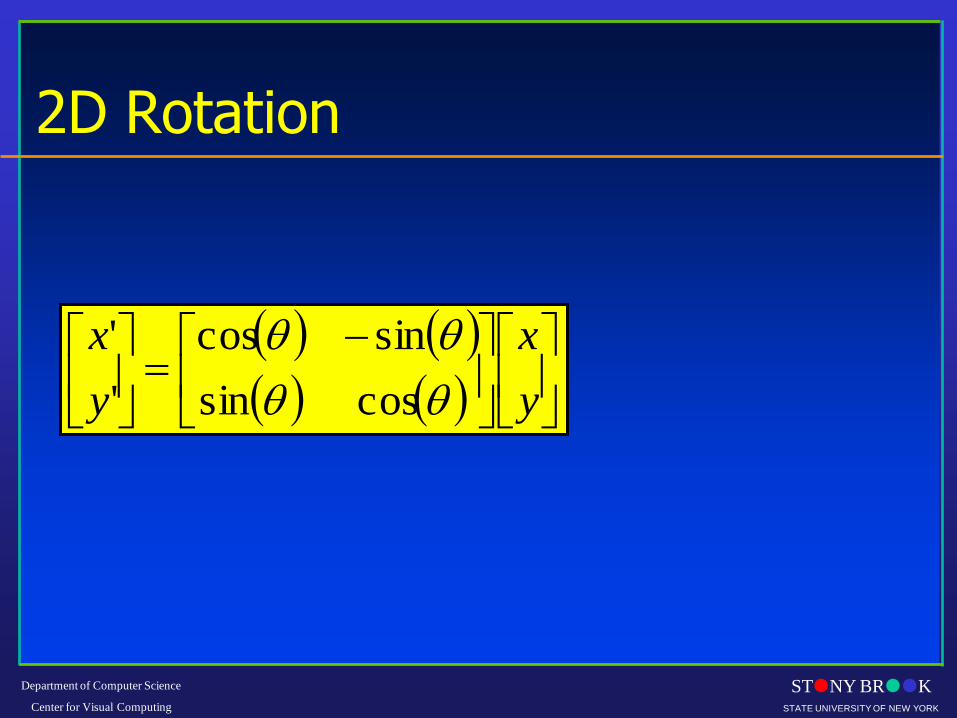
2-D Rotation
• It is straightforward to see this procedure in
matrix form:
Even though sin() and cos() are nonlinear
functions of ,
– x’ is a linear combination of x and y
– y’ is a linear combination of x and y
y
x
y
x
cossin
sincos
'
'
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D Rotation
y
x
y
x
cossin
sincos
'
'
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Basic 2D Transformations• Translation:
– x’ = x + tx
– y’ = y + ty
• Scale:– x’ = x * sx
– y’ = y * sy
• Shear:– x’ = x + hx*y
– y’ = y + hy*x
• Rotation:– x’ = x*cosQ - y*sinQ
– y’ = x*sinQ + y*cosQ

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Basic 2D Transformations• Translation:
– x’ = x + tx
– y’ = y + ty
• Scale:– x’ = x * sx
– y’ = y * sy
• Shear:– x’ = x + hx*y
– y’ = y + hy*x
• Rotation:– x’ = x*cosQ - y*sinQ
– y’ = x*sinQ + y*cosQ
Transformations can be combined (with simple algebra)

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Combining Transformations• Transformations can be combined (with
simple algebra)

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Composite Transformations
Transformations can be combined
(with simple algebra)

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Representation
• Represent 2D transformation by a matrix
• Multiply matrix by column vector
apply transformation to point

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Overview
• 2D Transformations
– Basic 2D transformations
– Matrix representation
– Matrix composition
• 3D Transformations
– Basic 3D transformations
– Same as 2D

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Representation
dcba
yx
dcba
yx''
dycxy
byaxx
'
'

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Representation
• Represent 2D transformation by a matrix
• Multiply matrix by column vector
apply transformation to point
yx
dcba
yx''
dcba
dycxy
byaxx
'
'

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Representation
yx
lk
ji
hg
fedcba
yx''

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Representation
• Transformations can be combined by
multiplication
– Matrices are a convenient and efficient way to
represent a sequence of transformations!
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
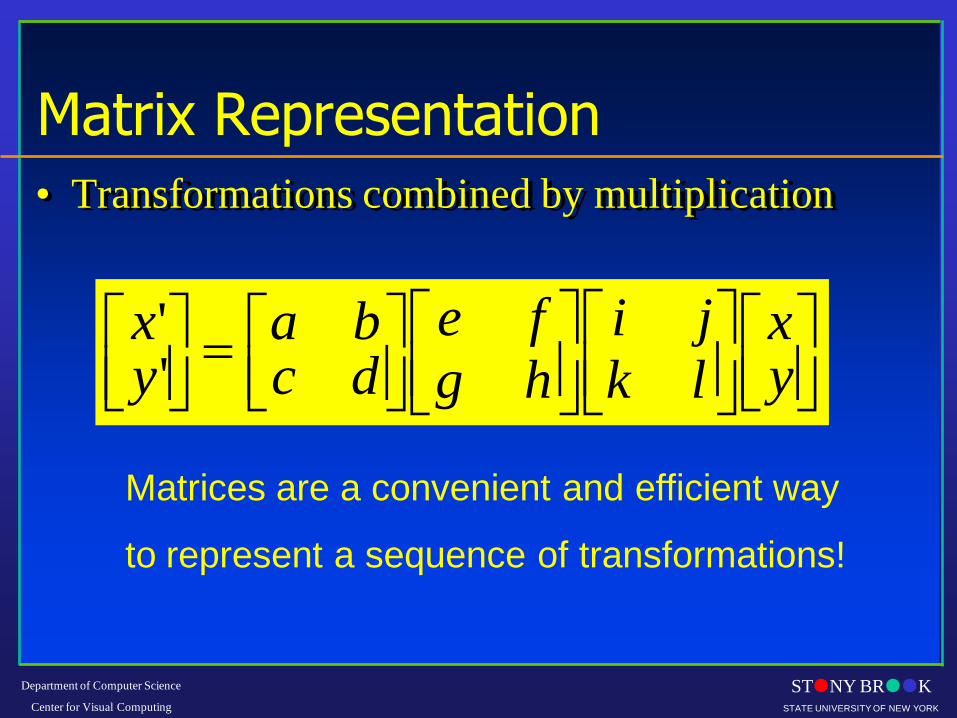
Matrix Representation
• Transformations combined by multiplication
yx
lk
ji
hg
fedcba
yx''
Matrices are a convenient and efficient way
to represent a sequence of transformations!

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
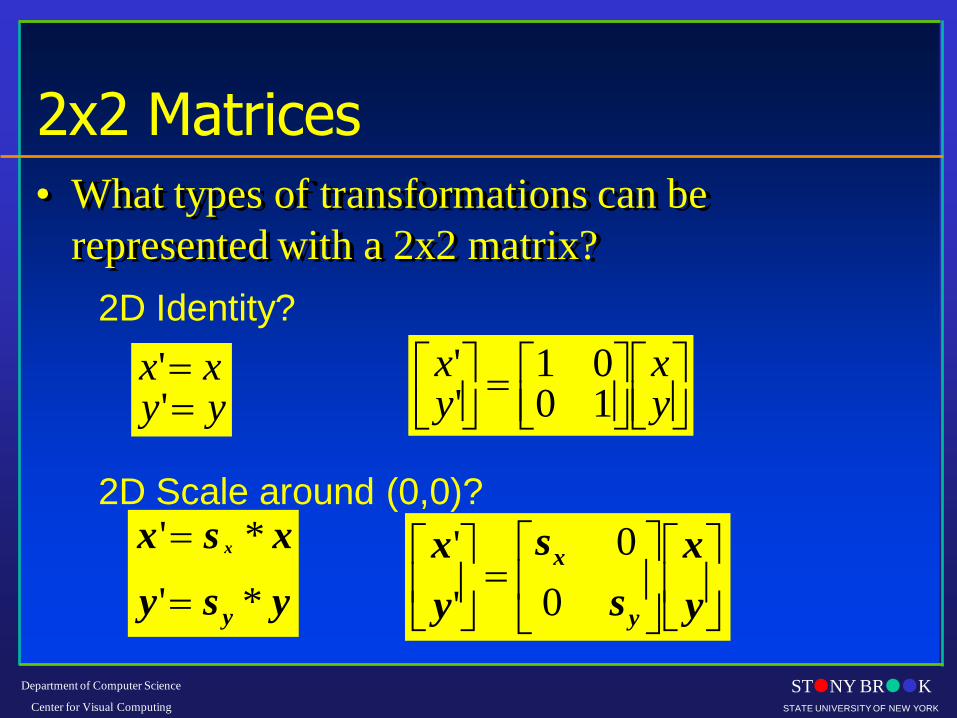
2x2 Matrices
• What types of transformations can be
represented with a 2x2 matrix?
2D Identity?
yyxx
''
yx
yx
1001
''
2D Scale around (0,0)?
ysy
xsx
y
x
*'
*'
y
x
s
s
y
x
y
x
0
0
'
'

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2x2 Matrices
• What types of transformations can be
represented with a 2x2 matrix?
2D Rotate around (0,0)?
yxyyxx
*cos*sin'*sin*cos'
QQQQ
y
x
y
x
cossin
sincos
'
'
2D Shear?
yxshy
yshxx
y
x
*'
*'
y
x
sh
sh
y
x
y
x
1
1
'
'

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2x2 Matrices
• What types of transformations can be
represented with a 2x2 matrix?
2D Mirror about Y axis?
yyxx
''
yx
yx
1001
''
2D Mirror over (0,0)?
yyxx
''
yx
yx
1001
''

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2x2 Matrices
• What types of transformations can be
represented with a 2x2 matrix?
2D Translation?
y
x
tyy
txx
'
'
Only linear 2D transformations
can be represented with a 2x2 matrix
NO!
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
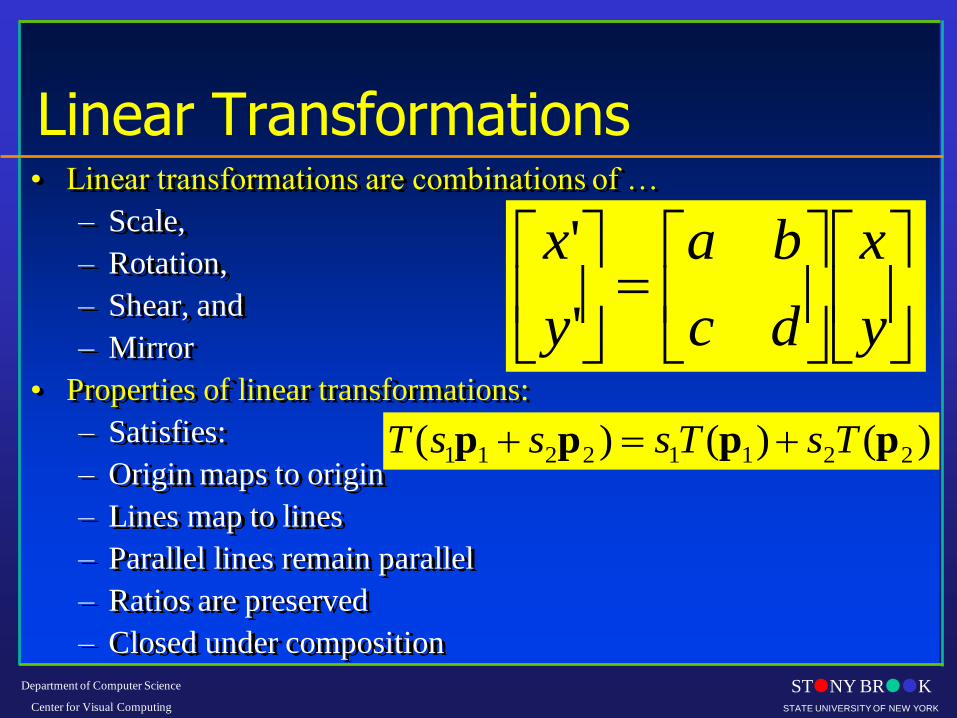
Linear Transformations• Linear transformations are combinations of …
– Scale,
– Rotation,
– Shear, and
– Mirror
• Properties of linear transformations:
– Satisfies:
– Origin maps to origin
– Lines map to lines
– Parallel lines remain parallel
– Ratios are preserved
– Closed under composition
)()()( 22112211 pppp TsTsssT
y
x
dc
ba
y
x
'
'
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
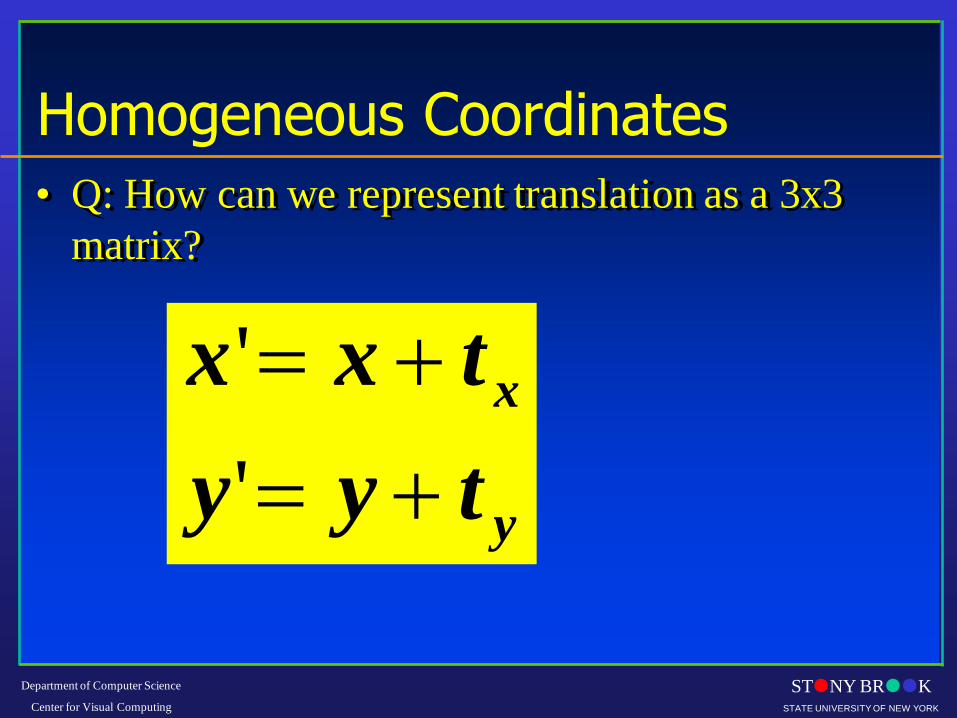
Homogeneous Coordinates
• Q: How can we represent translation as a 3x3
matrix?
y
x
tyy
txx
'
'
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
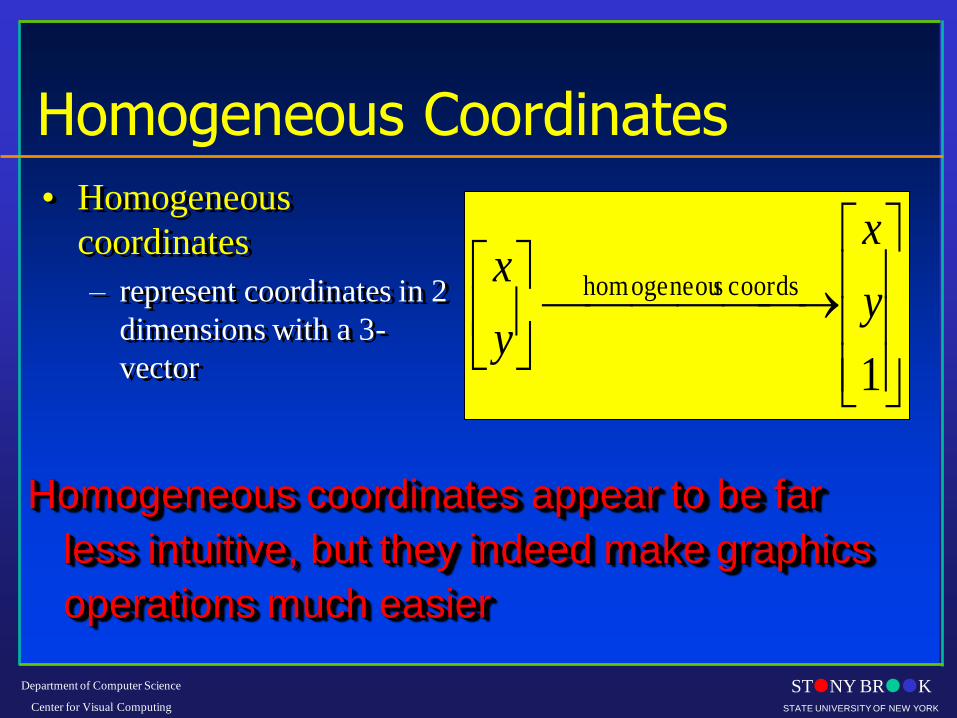
Homogeneous Coordinates
• Homogeneous
coordinates
– represent coordinates in 2
dimensions with a 3-
vector
1
coords shomogeneou y
x
y
x
Homogeneous coordinates appear to be far
less intuitive, but they indeed make graphics
operations much easier

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Homogeneous Coordinates
• Q: How can we represent translation as a 3x3
matrix?
• A: Using the rightmost column:
100
10
01
y
x
t
t
ranslationT
y
x
tyy
txx
'
'

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Translation
• Example of translation
11100
10
01
1
'
'
y
x
y
x
ty
tx
y
x
t
t
y
x

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Homogeneous Coordinates
• Add a 3rd coordinate to every 2D point
– (x, y, w) represents a point at location (x/w, y/w)
– (x, y, 0) represents a point at infinity
– (0, 0, 0) is not allowed
• Note that, (6,3,1); (12,6,2); and (18,9,3) represent the SAME
POINT in 2D
Convenient coordinate system to
represent many useful transformations

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Basic 2D Transformations
• Basic 2D transformations as 3x3 matrices
1100
0cossin
0sincos
1
'
'
y
x
y
x
1100
10
01
1
'
'
y
x
t
t
y
x
y
x
1100
01
01
1
'
'
y
x
sh
sh
y
x
y
x
Translate
Rotate Shear
1100
00
00
1
'
'
y
x
s
s
y
x
y
x
Scale

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Affine Transformations
• Affine transformations are combinations of …
– Linear transformations, and
– Translations
• Properties of affine transformations:
– Origin does not necessarily map to origin
– Lines map to lines
– Parallel lines remain parallel
– Ratios are preserved
– Closed under composition
w
yx
fedcba
w
yx
100
''

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Projective Transformations
• Projective transformations …
– Affine transformations, and
– Projective warps
• Properties of projective transformations:
– Origin does not necessarily map to origin
– Lines map to lines
– Parallel lines do not necessarily remain parallel
– Ratios are not preserved
– Closed under composition
w
yx
ihg
fedcba
w
yx
'
''
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Overview
• 2D Transformations
– Basic 2D transformations
– Matrix representation
– Matrix composition
• 3D Transformations
– Basic 3D transformations
– Same as 2D

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Composition
• Transformations can be combined by
matrix multiplication
QQQQ
w
yx
sysx
tytx
w
yx
100
0000
1000cossin0sincos
100
1001
'
''
p’ = T(tx,ty) * R(Q) * S(sx,sy) * p

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Composition
• Matrices are a convenient and efficient way to
represent a sequence of transformations
– General purpose representation
– Hardware matrix multiply
p’ = (T * (R * (S*p) ) )
p’ = (T*R*S) * p
STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Composition
• From local coordinates to global coordinates
• Be aware: order of transformations matters• Matrix multiplication is not commutative
p’ = T * R * S * p

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Composition
• A more complicated example: rotating 90
degrees around the mid-point of a line segment
(whose coordinates are (3,2))
• Can we change the order between rotation and
translation?

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Will this sequence of operations work?
Matrix Composition
1
'
'
1100
210
301
100
0)90cos()90sin(
0)90sin()90cos(
100
210
301
y
x
y
x
a
a
a
a

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Matrix Composition
• After correctly ordering the matrices
• Multiply matrices together
• What results is one matrix – store it (on stack)!
• Multiply this matrix by the vector of each vertex
• All vertices easily transformed with one matrix
multiply

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Overview
• 2D Transformations
– Basic 2D transformations
– Matrix representation
– Matrix composition
• 3D Transformations
– Basic 3D transformations
– Same as 2D

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
3D Transformations
• Same idea as 2D transformations
– Homogeneous coordinates: (x,y,z,w)
– 4x4 transformation matrices
wz
yx
ponm
lkji
hgfedcba
wz
yx
''
''

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Basic 3D Transformations
wz
yx
wz
yx
1000010000100001
'
''
w
z
y
x
t
t
t
w
z
y
x
z
y
x
1000
100
010
001
'
'
'
w
z
y
x
s
s
s
w
z
y
x
z
y
x
1000
000
000
000
'
'
'
wz
yx
wz
yx
1000010000100001
'
''
Identity Scale
Translation Mirror about Y/Z plane

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Basic 3D Transformations
QQQQ
wz
yx
wz
yx
1000010000cossin00sincos
'
''
Rotate around Z axis:
w
z
y
x
w
z
y
x
1000
0cos0sin
0010
0sin0cos
'
'
'
Rotate around Y axis:
QQQQ
wz
yx
wz
yx
10000cossin00sincos00001
'
''
Rotate around X axis:

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Reverse Rotations• Q: How do you undo a rotation of , R()?
• A: Apply the inverse of the rotation… R-1() = R(-)
• How to construct R-1() = R(-)
– Inside the rotation matrix: cos() = cos(-)
• The cosine elements of the inverse rotation matrix are
unchanged
– The sign of the sine elements will flip
– This is because the rotation matrix is orthogonal matrix
• Therefore… R-1() = R(-) = RT()

STNY BRKSTATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Summary• Coordinate systems are the basis for computer graphics
– World vs. model coordinates (Global vs. Local)
• 2-D and 3-D transformations
– Trigonometry and geometry
– Matrix representations
– Linear, affine, and projective transformations
• Matrix operations
– Matrix composition












![Neutral Citation Number: [2020] EWHC 786 (Ch) …...Neutral Citation Number: [2020] EWHC 786 (Ch) Case No: BR-2019-001049 BR-2019-001050 BR-2019-001051 BR-2019-001052 BR-2019-001053](https://static.fdocuments.us/doc/165x107/5f01b9747e708231d400bbb9/neutral-citation-number-2020-ewhc-786-ch-neutral-citation-number-2020.jpg)




