Cruise Control
9
Problem Statement 1:
-
Upload
angshuman-goswami -
Category
Automotive
-
view
156 -
download
0
Transcript of Cruise Control

Problem Statement 1:
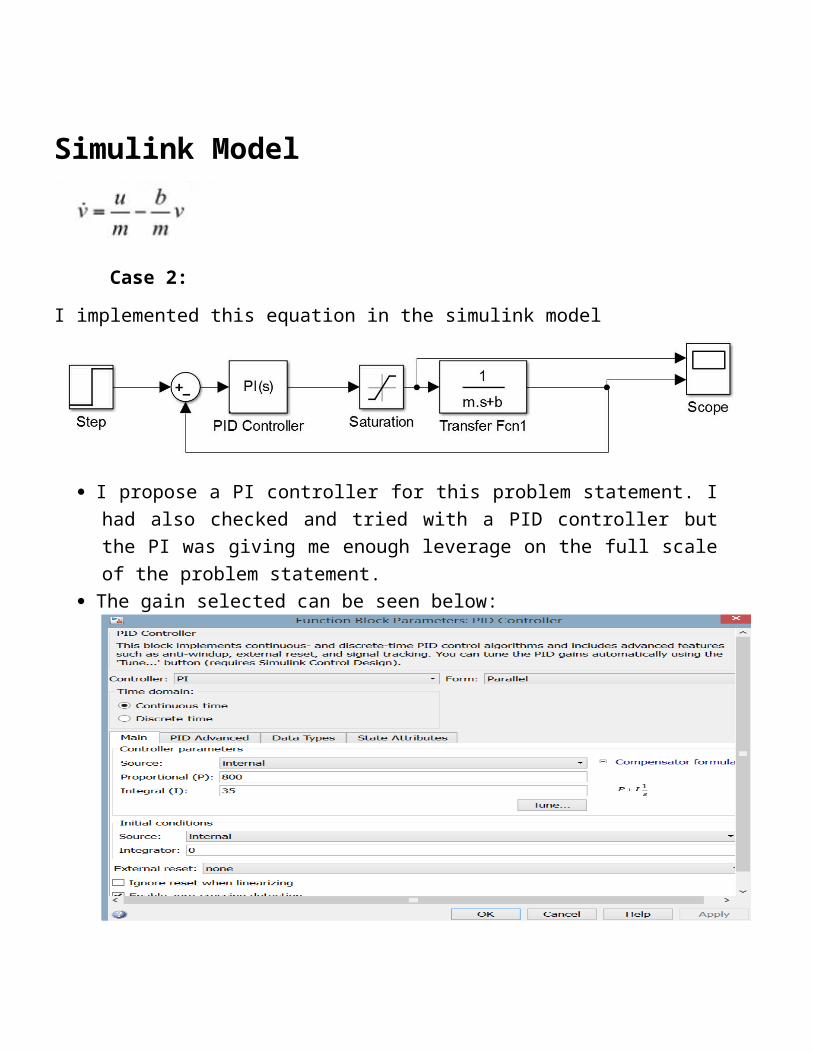
Simulink Model
Case 2:
I implemented this equation in the simulink model
I propose a PI controller for this problem statement. I had also checked and tried with a PID controller but the PI was giving me enough leverage on the full scale of the problem statement.
The gain selected can be seen below:

Problem Statement 2:

Simulink Model
Case 2(D):
I implemented this equation in the Simulink model:
I kept the same PI controller with the same gain as in case of problem statement 1 and system response in terms of design criteria is satisfied.
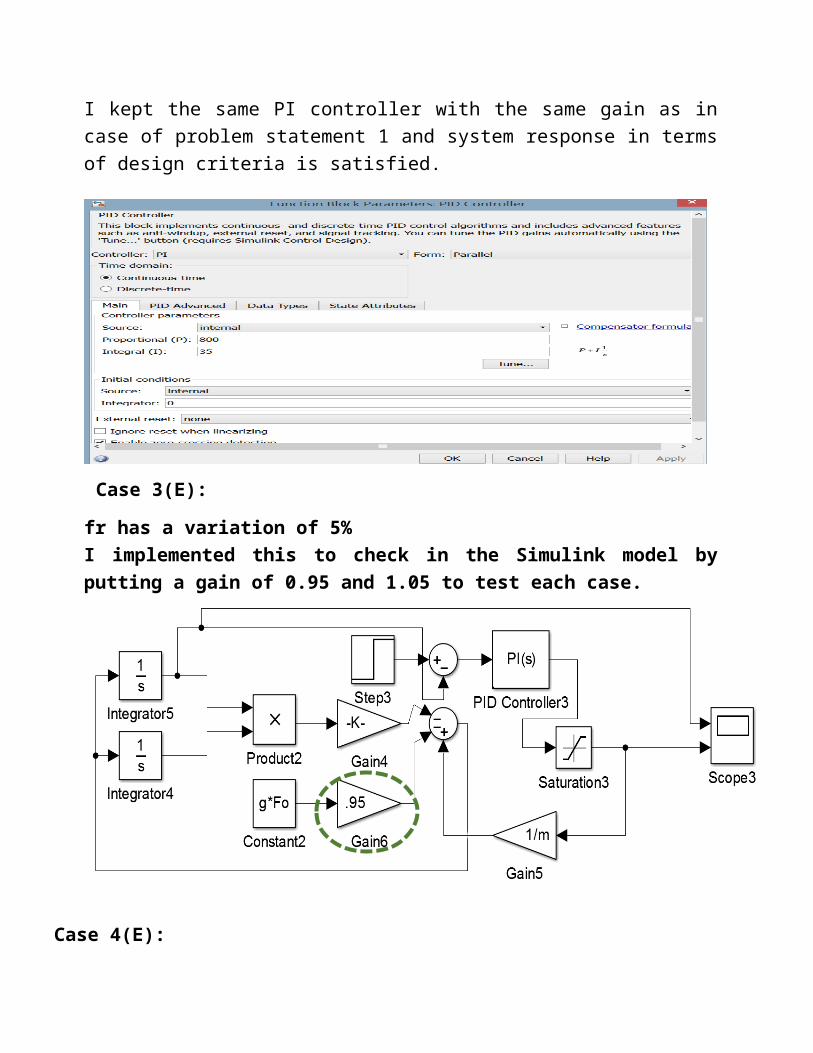
Case 3(E):
fr has a variation of 5%I implemented this to check in the Simulink model by putting a gain of 0.95 and 1.05 to test each case.
Case 4(E):
Note : Gain2=Gain4=Gain7=(Cd*A*Dens)/(2*m)

Case 5(F):
Gain= g*k+ (Cd*A*Dens)/ (2*m)
In all the 4 cases a PI controller with a proportional gain of 800 and an integral gain of 35 meets all the design requirements.
Summary of all cases:
Rise time Max
OvershootSteady State
ErrorSettling
time Peak Time Steady State Value of Traction Force,U
sec % - sec sec NmCase
1 3.8 2.8 0 20 8.5 500
Case 2 3.54 6.5 0 37 8.5 165.46
Case 3 3.54 6.6 0 37 8.5 161.15
Case 4 3.54 6.5 0 37 8.5 176.15
Case 5 3.54 6.5 0 36.5 8.5 178.15
Note: I have taken a saturation block after the PI controller for engine torque demand taking into account a FDR of 5 and hence saturation at 2500Nm for safety of the transmission since most passenger cars won’t have a Final Drive Ratio above 5

Comparison of the velocity trend for the different cases:
Overshoot increases when we take the actual parameters (friction and aerodynamic drag) into account. Also at kick off these is a slight lag due to the increased resistive forces.
Comparison of the traction force for the different cases:
Traction force required to continue in the steady state is more realistic when we consider the actual parameters(aerodynamic drag and actual friction)
As expected when friction is lower we need lower steady state traction for and vice versa