Bi-layer segmentation of binocular stereo video
18
Bi-layer Bi-layer segmentation segmentation of binocular of binocular stereo video stereo video V. Kolmogorov, A. Criminisi, A. Blake, G. Cross, C. Rother Microsoft Research, Cambridge, UK Computer Vision Group
description
Transcript of Bi-layer segmentation of binocular stereo video

Bi-layer segmentationBi-layer segmentation of binocular stereo video of binocular stereo video
V. Kolmogorov, A. Criminisi, A. Blake, G. Cross, C. Rother
Microsoft Research, Cambridge, UKComputer Vision Group

ProblemProblem
• Two layers (Bg and Fg)– Scenarios: video-conferencing, live bluescreening without bluescreen
• Two cameras• Background may not be static• Goal: accurately segment foreground object in real-time
– Applications: background substitution, ...
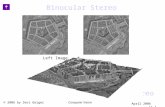
Left input Right input

Sources of informationSources of information
• Stereo– Foreground object has larger disparity
• Colour– Background and foreground have distinct colour
distributions
• Contrast– There is image gradient at Bg/Fg transition
• Spatial coherence– MRF model

Previous workPrevious work
• Colour/Contrast (+2D coherence)– Graph cuts
(Boykov et al. ’01, Rother et al. ’04)
• Stereo (+1D coherence)– Dynamic programming
(Ohta et al. ’85, Cox et al. ’96, Criminisi et al. ’03)
Left input

Fusing colour/contrast and stereoFusing colour/contrast and stereo
• Colour and stereo complement each other• Result from fusion:
Results from our technique

• Ideally:
segmentation (Bg/Fg/Occ)
disparity
Fusing colour/contrast and stereoFusing colour/contrast and stereo
data
Construct p(x , d | z) Prior p(x , d) –2D MRF model
Marginalise d out to get p(x | z)
Compute x as MAP configuration Intractable!

Approximations
• Simplify the model to get real-time performance• Two different approaches:
– Layered Dynamic Programming (LDP)– Layered Graph Cut (LGC)
• Probabilistic formulation– Parameters can mostly be set automatically
• Very similar error statistics– Consistently better than colour/contrast or stereo alone

Layered Dynamic Programming (LDP)Layered Dynamic Programming (LDP)
• Approximation: in the prior neglect coupling between scanlines
• 1D MRF model (Markov chain)
• Compute path from (0,0) to (N,N) and label {Fg,Bg,Occ} for each vertex
Left
Rig
ht
Disparity

Layered Graph Cut (LGC)Layered Graph Cut (LGC)
• Approximation: in the prior neglect conditioning of disparity dp on disparities of neighbours
– conditioned only on segmentation label xp{Bg,Fg,Occ}
• Marginalise disparities out• Energy minimisation problem with 3 labels• Solve it using 2 graph cut computations
– Approx. 20 frames per second (320 x 240, 3GHz)

Setting parametersSetting parameters
• Two approaches:– Generative: from physics (e.g. from average width of
occluded regions)– Discriminative: minimize error rates
• Consistent results! – See technical report 2005 (
http://research.microsoft.com/vision/cambridge/i2i/)

Experiments: ground truth dataExperiments: ground truth data
Ground-Truth segmentation at http://research.microsoft.com/vision/cambridge/i2i/
• 19 calibrated stereo sequences• 6 with ground truth segmentation
– Every 5th or 10th frame– Pixels marked as “Bg”, “Fg” or “Unknown”
Original Ground-truth segmentation

Accuracy Accuracy ofof segmentation segmentation
LGC Segmentation

Accuracy of segmentationAccuracy of segmentation

Accuracy of segmentationAccuracy of segmentation

ConclusionConclusion
• Two algorithms based on different approximations– Fuse colour/constrast, stereo, and spatial coherence– Probabilistic formulation– Capable of real-time performance
• Similar error statistics– Consistently better than state-of-the art techniques
• Different characteristics– LDP: Parallelisable (scanlines processed independently)– LGC: Marginalisation could be done on GPU
MSN: i2i cambridge


Segmentation errors (LGC)

Segmentation errors (LGC)