A Vibration Model of Ball Bearings with a Localized Defect...
15
Research Article A Vibration Model of Ball Bearings with a Localized Defect Based on the Hertzian Contact Stress Distribution Fanzhao Kong, Wentao Huang , Yunchuan Jiang, Weijie Wang, and Xuezeng Zhao School of Mechatronics Engineering, Harbin Institute of Technology, 92 West Dazhi Street, Harbin 150001, China Correspondence should be addressed to Wentao Huang; [email protected] Received 27 July 2017; Revised 5 February 2018; Accepted 28 February 2018; Published 1 April 2018 Academic Editor: Naveed Ahmad Copyright © 2018 Fanzhao Kong et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. To study the vibration mechanism of ball bearings with localized defects, a vibration model of a ball bearing based on the Hertzian contact stress distribution is proposed to predict the contact force and vibration response caused by a localized defect. e calculation of the ball-raceway contact force when the ball passes over the defect is key to establishing a defect vibration model. Hertzian contact theory indicates that the contact area between the ball and the raceway is an elliptical contact surface; therefore, a new approach is used to calculate the ball-raceway contact force in the defect area based on the stress distribution and the contact area. e relative motion between the inner ring, the outer ring, and the balls is considered in the proposed model, and the Runge-Kutta algorithm is used to solve the vibration equations. In addition, vibration experiments of a bearing with an outer ring defect under different loads are performed. e numerical signals and experimental signals are compared in the time and frequency domains, and good correspondence between the numerical and experimental results is observed. Comparisons between the traditional model and the proposed model reveal that the proposed model provides more reasonable results. 1. Introduction e failure of a properly installed and lubricated bearing occurs in the form of surface fatigue cracks, such as spalls and pits [1]. In a ball bearing, spalls and pits oſten form on the contact surfaces between the raceways and balls. e variation of the contact deformation between the ball and the raceway when the ball passes over a defect causes a sudden change in the contact force, which causes periodic vibration of the bearing. How to describe and explain this process using mathematical and physical models is a major area of research on bearings with defects. In early studies [2, 3], the variation of the fault signals of bearing defects in the frequency domain was analysed in detail. Subsequently, a vibration model of bearings was intro- duced. e research focused on the periodic vibration phe- nomenon in bearings, and an impulse was used to describe the impact force caused by a localized defect. Rafsanjani et al. [4] developed a vibration model of ball bearings, studied the vibration characteristics of localized defects on the inner ring, outer ring, and balls, and established a pulse function that contains several parameters, such as the position, angle, and depth of the defects. Tandon and Choudhury [5, 6] used a rectangular pulse, a triangular pulse, and a half-sine pulse to express the impact force caused by localized defects, correlated the severity of the defect and the defect generation time with the amplitude of the pulse, and calculated the width of the pulse from the width of the defect. e results showed that the vibration amplitude of the outer raceway’s defect expressed by the rectangular pulse is greater than that expressed by the half-sine pulse. Although the periodic vibration of a bearing due to a fault can be simulated somewhat by pulse functions, the geometric morphology of defects cannot be adequately described, and the generation of the impact force cannot be adequately explained; thus, current research focuses on simulating the impact process via mechanical calculations. In previous studies [7–17], scholars suggested that when a ball passes over a defect on the raceway, the ball will sink to a certain depth, and the contact deformation between the ball and raceway will change, resulting in a change in the ball-raceway contact force; this process causes periodic vibration of the bearings. Sawalhi and Randall [7, 8] presented a gearbox model with bearing faults and compared it with the model Hindawi Shock and Vibration Volume 2018, Article ID 5424875, 14 pages https://doi.org/10.1155/2018/5424875
Transcript of A Vibration Model of Ball Bearings with a Localized Defect...

Research ArticleA Vibration Model of Ball Bearings with a Localized DefectBased on the Hertzian Contact Stress Distribution
Fanzhao Kong, Wentao Huang , Yunchuan Jiang, Weijie Wang, and Xuezeng Zhao
School of Mechatronics Engineering, Harbin Institute of Technology, 92 West Dazhi Street, Harbin 150001, China
Correspondence should be addressed to Wentao Huang; [email protected]
Received 27 July 2017; Revised 5 February 2018; Accepted 28 February 2018; Published 1 April 2018
Academic Editor: Naveed Ahmad
Copyright © 2018 Fanzhao Kong et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
To study the vibration mechanism of ball bearings with localized defects, a vibration model of a ball bearing based on theHertzian contact stress distribution is proposed to predict the contact force and vibration response caused by a localized defect.The calculation of the ball-raceway contact force when the ball passes over the defect is key to establishing a defect vibrationmodel. Hertzian contact theory indicates that the contact area between the ball and the raceway is an elliptical contact surface;therefore, a new approach is used to calculate the ball-raceway contact force in the defect area based on the stress distribution andthe contact area. The relative motion between the inner ring, the outer ring, and the balls is considered in the proposed model,and the Runge-Kutta algorithm is used to solve the vibration equations. In addition, vibration experiments of a bearing with anouter ring defect under different loads are performed.The numerical signals and experimental signals are compared in the time andfrequency domains, and good correspondence between the numerical and experimental results is observed. Comparisons betweenthe traditional model and the proposed model reveal that the proposed model provides more reasonable results.
1. Introduction
The failure of a properly installed and lubricated bearingoccurs in the form of surface fatigue cracks, such as spallsand pits [1]. In a ball bearing, spalls and pits often formon the contact surfaces between the raceways and balls. Thevariation of the contact deformation between the ball and theraceway when the ball passes over a defect causes a suddenchange in the contact force, which causes periodic vibrationof the bearing. How to describe and explain this process usingmathematical and physical models is a major area of researchon bearings with defects.
In early studies [2, 3], the variation of the fault signalsof bearing defects in the frequency domain was analysed indetail. Subsequently, a vibrationmodel of bearings was intro-duced. The research focused on the periodic vibration phe-nomenon in bearings, and an impulse was used to describethe impact force caused by a localized defect. Rafsanjani etal. [4] developed a vibration model of ball bearings, studiedthe vibration characteristics of localized defects on the innerring, outer ring, and balls, and established a pulse functionthat contains several parameters, such as the position, angle,
and depth of the defects. Tandon and Choudhury [5, 6]used a rectangular pulse, a triangular pulse, and a half-sinepulse to express the impact force caused by localized defects,correlated the severity of the defect and the defect generationtime with the amplitude of the pulse, and calculated thewidth of the pulse from the width of the defect. The resultsshowed that the vibration amplitude of the outer raceway’sdefect expressed by the rectangular pulse is greater than thatexpressed by the half-sine pulse.
Although the periodic vibration of a bearing due to a faultcan be simulated somewhat by pulse functions, the geometricmorphology of defects cannot be adequately described, andthe generation of the impact force cannot be adequatelyexplained; thus, current research focuses on simulating theimpact process via mechanical calculations. In previousstudies [7–17], scholars suggested that when a ball passesover a defect on the raceway, the ball will sink to a certaindepth, and the contact deformation between the ball andraceway will change, resulting in a change in the ball-racewaycontact force; this process causes periodic vibration of thebearings. Sawalhi and Randall [7, 8] presented a gearboxmodel with bearing faults and compared it with the model
HindawiShock and VibrationVolume 2018, Article ID 5424875, 14 pageshttps://doi.org/10.1155/2018/5424875

2 Shock and Vibration
in [9]. In [9], when the rolling element enters or exits thespall region, the contact force between the elements andthe raceways will change instantly, which can cause sharpvibrations in the gearbox system. This model predicts verylarge impulsive forces in the system as a result of the sharpincrease in acceleration required tomaintain a balancewithinthe system.Thus, they updated the model to reflect the actualpath of the rolling element and defined the depth of thedefect as a gradient function associated with the width of thedefect, the rolling element’s radius, and the race radius. Patelet al. [10] reported a dynamic model of ball bearings withsingle and double defects on the raceways; a fixed sinkingdepth of the balls was obtained based on the defect widthand the ball radius. Patel et al. [11] updated the model byconsidering the profile of a localized defect and assigning avariable defect depth based on the variable size of the defectand the ball radius.The simulation results in these two papersare generally consistent with the experimental results. Patil etal. [12] proposed a ball bearing model with a localized defectto predict the vibration response. In this model, the defectis modelled as a circumferential half sinusoidal wave, and thevibration amplitude of the ball is calculated based on the angleof the defect, the rotational speed of the balls, and the defectwidth. The experimental results showed that the greater thedefect width is, the larger the vibration amplitude of the faultsignal is. Moazen Ahmadi et al. [13] established a nonlineardynamic model of roller bearings with a wider range ofdefects. The model considers the finite size of the rollers,the contact force, and the damping force between the rollingelements and raceways to calculate the path and contact forceof rollers in the defect region. Comparisons between theproposed model, the point mass model, and experimentalresults were performed and showed that the proposed modelis more reasonable than the point model; the numericalresults are more consistent with the experimental results. Liuet al. [14] proposed that the vibration amplitude and durationof the impact force are determined by the geometric profileand size of the defects. Based on the geometric profile andsize of the defects, ball-defect contacts were divided into fivetypes; moreover, the sinking depth of the ball was expressedby piecewise functions according to the number of contactpoints between the balls and the defects, and the contactstiffness of each type was calculated to obtain the contactforce. Gomez et al. [15] presented a deep groove ball bearingmodel with localized defects to study the instantaneousangular speed variations of the balls.Thismodel used a simplelocalized defect model with a rigidly defect depth, and thedefect depth is also regarded as the variation of the contactdeformation when the balls pass over the defect. Mishra etal. [16] proposed three different ball bearing defect models, a5-DOF vibration model developed in MATLAB Simulink, amultibody dynamics model using bond graph by SYMBOLSsoftware, and a multibody CAD model using ADAMS soft-ware. The simulated and the experimental vibration signalsof different bearing faults are also compared. However, theball-raceway contact deformation has a constant value whenthe balls pass over the defect in the vibrationmodel. Chen andKurfess [17] proposed a new rolling element bearingmodel toestimate the defect size on the outer raceway. The vibration
signal from the time domain is used to estimate the defectsize. The experiment results showed that this model providesaccurate estimation.
In the studies described above, the contact forces betweenthe balls and the defects are calculated based on the sinkingdepth of the balls, which is related to the defect width andthe ball radius. The advantage of this approach is that it cancalculate the impact forces of defects with different sizes;however, the disadvantage of this approach is that regardlessof how the load applied to the bearing changes, the rigidlysinking depth of the ball is unchanged in the defect area.To solve this problem, a vibration model of a bearing witha defect that uses Hertzian contact stress distribution isproposed. The new model considers the contact area and thestress distribution. It includes several important parameters,the defect width and the ball radius, as well as the bearingload, the defect geometry, and the shaft rotational speed. Inthe newmodel, the load on the bearings can affect the sinkingdepth of the balls, and the geometric relationship betweenthe balls, raceways, and defects is different from that in thetraditional models.
This paper is divided into six sections.The second sectionpresents the analysis of the contact process between a ball anda defect, and the third section introduces the contact modelof balls and raceways. An experiment is presented in thefourth section. In the fifth section, the numerical results of theproposed model are analysed, and the experimental resultsand the numerical results are compared. The last sectionpresents the conclusions.
2. Analysis of the Contact Process betweenthe Ball and Defect Area
Hertzian contact theory is used to calculate the contact forcebetween the ball and the raceway over a long period, as shownin the following:
𝑄 = 𝐾 ⋅ 𝛿𝑛, (1)
where𝑄 is the contact force,𝐾 is the contact stiffness, 𝛿 is thecontact deformation, and 𝑛 = 1.5 for a ball bearing.
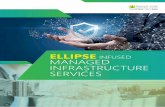
The sinking depth of the ball in defect area is shown inFigure 1. The model in Figure 1(a) is the traditional model;[7–11, 15–17] used this model. However, all the sinking depthsof the balls in Figure 1 are possible in the proposedmodel; thesinking depth is affected by the applied load.
In Figure 1(a), the sinking depth Δ of the ball is obtainedfrom the width of the defect, as shown in the following:
Δ = 𝑟 − √𝑟2 − 𝐿2, (2)
where 𝑟 is the radius of the ball and 2𝐿 is the width of thedefect.
As mentioned previously, 𝛿 is the contact deformationbetween the ball and the raceways before the ball reaches thedefect. When the ball passes over the defect, the remainingdeformation between the ball and the raceways is 𝛿−Δ; thus,according to (1), the ball-defect contact force is
𝑄 = 𝐾 ⋅ (𝛿 − Δ)3/2 . (3)

Shock and Vibration 3
Load
2LOuter ring
r
Δ
(a)
2L
Outer ring
r
Load
Δ
(b)
2LOuter ring
r
Load
Δ
(c)
Figure 1: The sinking depth of the ball.
This method can be considered an approximate method.For details, refer to [11]. This traditional model has thefollowing disadvantages.(1)The sinking depth of the ball is a function of only theball radius and the defect width, and it is independent of theapplied load on the bearing.Moreover, after the sinking depthof the ball is determined, the path of the ball is also limited.(2) When the ball contacts the raceways or the defect, asmall contact area is simplified as a line contact or a pointcontact, which results in an inaccurate contact force.
To address these problems, a Hertzian contact stressdistribution is applied to the calculation of the contact forcein the defect area. In the proposed model, the sinking depthof the ball is related to the load applied on the bearing, and thecontact area between the ball and defect is also considered.
3. Bearing System Model
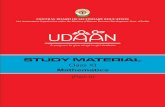
3.1. Vibration Model of the Bearing. A vibration model ofthe bearing is presented in Figure 2. The ball bearing (Type6204) is mounted at the end of a shaft. The inner ring isfixed rigidly to the motor shaft, and the outer ring is fixedto the housing. A constant additional load 𝐹𝑙 is applied tothe housing in the vertical direction, and an accelerometeris mounted onto the housing to measure the vibration ofthe outer ring. The ball-raceway contact can be considereda spring-mass system. The proposed model incorporates thefollowing realistic assumptions and considerations.
(1)The balls rotate with the cage; that is, the balls do notslip.(2)The forces act in the radial direction only; the contactis an elastic contact and follows Hertzian contact theory.(3)The forces act only in the radial plane of the bearing.(4) When the ball passes over the localized defect onthe raceway, the stress distribution between the ball and theraceway follows Hertzian contact theory.(5) Because of the centrifugal force, the balls, cage, andouter ring have the same rotational frequencies.(6) Grease is used in the bearing; the damping due to thelubricating film between the ball and the raceways and thedamping of the shaft and the housing are considered.
3.2. Kinematics of the Balls. The inner and outer centres ofthe rolling element bearings are not concentric because of theapplied load and the bearing clearance. Figure 3 illustrates therelationships between the motions of the components of theball bearing, where𝑂in(𝑥𝑖, 𝑦𝑖) and𝑂out(𝑥𝑜, 𝑦𝑜) are the centresof the raceways, 𝑃𝑗(𝑝𝑥,𝑗, 𝑝𝑦,𝑗) is the centre of the 𝑗th ball, theraceway radii are 𝑅𝑖 and 𝑅𝑜, the angular positions of the 𝑗thball on the raceways are 𝛼in,𝑗 and 𝛼out,𝑗, and 𝛼out,𝑗 can bedescribed as follows:
𝛼out,𝑗 = 2𝜋 ⋅ 𝑓𝑐 ⋅ 𝑡 + 𝜋4 (𝑗 − 1) + 𝛼0. (4)
In Figure 3, the geometrical relationships of𝛼in,𝑗 and𝛼out,𝑗are as follows:

4 Shock and Vibration
MION
m
m
m
m
m
m
m
m
cs Ks
MCH
y
x Fl
KCH
KION
cb
cb
Accelerometer
Figure 2: The bearing system model.
cos𝛼in,𝑗 = (𝑥𝑜 + 𝑂𝑃out,𝑗 ⋅ cos𝛼out,𝑗 − 𝑥𝑖)𝑂𝑃in,𝑗 ,
sin𝛼in,𝑗 = (𝑦𝑜 + 𝑂𝑃out,𝑗 ⋅ sin𝛼out,𝑗 − 𝑦𝑖)𝑂𝑃in,𝑗 ,cos (𝛼in,𝑗 − 𝛼out,𝑗) = cos𝛼in,𝑗 ⋅ cos𝛼out,𝑗 + sin𝛼in,𝑗
⋅ sin𝛼out,𝑗,
(5)
where 𝑓𝑐 is the cage frequency, 𝛼0 is the initial angularposition of the cage, 𝑂𝑃in,𝑗 = √(𝑝𝑥,𝑗 − 𝑥𝑖)2 + (𝑝𝑦,𝑗 − 𝑦𝑖)2,𝑂𝑃out,𝑗 = √(𝑝𝑥,𝑗 − 𝑥𝑜)2 + (𝑝𝑦,𝑗 − 𝑦𝑜)2, and the ball-racewaydeformations are denoted as follows:
𝛿in,𝑗 = 𝑟 + 𝑅𝑖 − 𝑂𝑃in,𝑗,𝛿out,𝑗 = 𝑟 − 𝑅𝑜 − 𝑂𝑃out,𝑗. (6)
3.3. Defect Model Based on the Hertzian ContactStress Distribution
3.3.1. Hertzian Contact Stress Distribution. Theanalysis of thecontact type of the bearing is presented below. In Figure 4,when a ball contacts the raceway, the contact is a point contactif the load is zero, as shown in Figure 4(a). After a load isapplied to the ball, the contact point expands to an ellipse,as shown in Figure 4(b).
The Hertzian contact force calculation of a ball bearingwas simplified. For the contact area between the ball and theraceway (both of which are made of steel), 𝑎 is the semimajor
Inner racewayOuter raceway
Bally
x
OCH
OIONION,j
Ro
CH,j
Pjr
ION,j
CH,j
Ri
Figure 3: Relationships between the motions of the components ofa ball bearing.
axis, and 𝑏 is the semiminor axis; they can be obtained asfollows:
𝑎 = 0.0236𝑎∗ ( 𝑄∑𝜌)1/3 ,
𝑏 = 0.0236𝑏∗ ( 𝑄∑𝜌)1/3 ,
(7)
where ∑𝜌 is the sum of the curvatures of the ball and theraceway and 𝑎∗ and 𝑏∗ can be obtained from [18].
The stress on the elliptical contact area is shown inFigure 5, and the normal stresswithin the contact area is givenby the following:
𝜎 = 3𝑄2𝜋𝑎𝑏√1 − 𝑥2𝑎2 − 𝑦2𝑏2 . (8)
3.3.2. LocalizedDefect Contact Force. When a ball passes overthe localized defect (Figure 6), the shape of the ball-defectcontact area changes as the ball moves. Figure 7 illustratesthe geometry of the contact area in Figure 6 with coordinates,where the size of the localized defect is 2𝐿; when the 𝑗th ballmoves from left to right, the contact area can be described asfollows:
𝑥2𝑎2 +(𝑦 − 𝑦𝑗)2𝑏2 = 1, (9)
where 𝑦𝑗 is the 𝑦-axis coordinate of the ellipse centre.According to (8) and (9), the compressive stress distributionof the contact ellipse is
𝜎 = 3𝑄2𝜋𝑎𝑏√1 − (𝑥𝑎)2 − (𝑦 − 𝑦𝑗𝑏 )2. (10)
Figure 7 illustrates the variation of the ball-racewaycontact area at the defect edge. As the ball begins to enter the

Shock and Vibration 5
Contact point
Ball
Inner ring
(a)
Q
X
Contact ellipse
Ball
Inner ring
Ball
Q ZZ
Y
2b
2b
2a
2a
(b)
Figure 4: The contact area between the ball and raceway. (a) The contact point under no load conditions; (b) the contact ellipse under anapplied load [18].
y
x x
yb
a
Figure 5: Compressive stress distribution of the ball-raceway contact.
defect (Figure 7(a)), the ball-raceway contact area at the leftedge of the defect becomes smaller; at this stage, the range of𝑦𝑗 is −𝐿 − 𝑏 ≤ 𝑦𝑗 ≤ 𝑏 − 𝐿, and the contact force 𝑄𝑗,𝑓 betweenthe 𝑗th ball and the left edge of the defect (contact force of theshadow area) is
𝑄𝑗,𝑓 = ∫−𝐿𝑦𝑗−𝑏
𝑑𝑦∫𝑎√1−((𝑦−𝑦𝑗)/𝑏)2−𝑎√1−((𝑦−𝑦𝑗)/𝑏)2
𝜎𝑑𝑥,−𝐿 − 𝑏 ≤ 𝑦𝑗 ≤ 𝑏 − 𝐿.
(11)
Figure 7(b) shows that there is no contact between the balland the edge of the defect.When a ball enters the defect, if thecontact force of the inner raceway is smaller, the speed of thebearing is faster, or the defect is larger, the sinking depth ofthe ball decreases, and the ball is unable to contact the edgesof the defect.Thus, the contact force is zero. For this condition(𝑏 < 𝐿), the contact force is
𝑄𝑗,𝑓 = 0, 𝑏 − 𝐿 ≤ 𝑦𝑗 ≤ 𝐿 − 𝑏. (12)
Figure 7(c) shows that the ball is in contact with bothedges of the defect; this condition is the opposite of that inFigure 7(b). For this condition (𝑏 > 𝐿), the contact force is
𝑄𝑗,𝑓 = ∫−𝐿𝑦𝑗−𝑏
𝑑𝑦∫𝑎√1−((𝑦−𝑦𝑗)/𝑏)2−𝑎√1−((𝑦−𝑦𝑗)/𝑏)2
𝜎𝑑𝑥
+ ∫𝐿𝑦𝑗+𝑏
𝑑𝑦∫𝑎√1−((𝑦−𝑦𝑗)/𝑏)2−𝑎√1−((𝑦−𝑦𝑗)/𝑏)2
𝜎𝑑𝑥,𝐿 − 𝑏 ≤ 𝑦𝑗 ≤ 𝑏 − 𝐿.
(13)
In Figure 7(d), as the ball exits the defect, the contact areabecomes larger, the range of 𝑦𝑗 is 𝐿 − 𝑏 ≤ 𝑦𝑗 ≤ 𝐿 + 𝑏, and thecontact force between the ball and the right edge of the defectis
𝑄𝑗,𝑓 = ∫𝐿𝑦𝑗+𝑏
𝑑𝑦∫𝑎√1−((𝑦−𝑦𝑗)/𝑏)2−𝑎√1−((𝑦−𝑦𝑗)/𝑏)2
𝜎𝑑𝑥,𝐿 − 𝑏 ≤ 𝑦𝑗 ≤ 𝐿 + 𝑏.
(14)
For the ball bearingwith a localized defect on the raceway,the centre of the contact ellipse is 𝑦𝑗, its angular position onthe outer raceway is equal to the angular position of the ballcentre, and the angular position of the defect on the outerraceway is 𝛼out,𝑓. When the ball moves near the defect, therelationship between 𝑦𝑗 and 𝛼out,𝑓 is as follows:

6 Shock and Vibration
Contact ellipse
Q
Defect
Outer ring
2b2a
Figure 6: The ball-raceway contact area and a defect on the outer ring.
b
a
y
x
L L
−yj
(a)
y
b
a
L L
x
(b)
b
a
y
x
L L
(c)
y
x
a
b
LL
yj
(d)
Figure 7: The variation of the ball-raceway contact area at the defect edge.
𝛼out,𝑗 = 𝛼out,𝑓 + 𝑦𝑗𝑅𝑜 , 𝑦𝑗 ≪ 𝑅𝑜. (15)
3.4. Calculation of the Contact Force. The contact forcesbetween the 𝑗th ball and the raceways are given by 𝑄in,𝑗 and𝑄out,𝑗:
𝑄out,𝑗 = 𝐾out𝛿3/2out ,𝑄in,𝑗 = 𝐾in𝛿3/2in . (16)
When a ball passes the defect, the contact force betweenthe ball and the outer raceway in the defect area is given by
𝑄out,𝑗 = 𝑄𝑗,𝑓,𝛼out,𝑓 − (𝐿 + 𝑏)𝑅𝑜 ≤ 𝛼out,𝑗 ≤ 𝛼out,𝑓 + (𝐿 + 𝑏)𝑅𝑜 . (17)
The sums of the contact forces between the balls andthe raceways in the 𝑥-axis and 𝑦-axis directions are asfollows:
𝑄in,𝑦 = 𝑛∑𝑗=1𝑄in,𝑗 ⋅ sin𝛼in,𝑗,
𝑄in,𝑥 = 𝑛∑𝑗=1𝑄in,𝑗 ⋅ cos𝛼in,𝑗,
𝑄out,𝑦 = 𝑛∑𝑗=1𝑄out,𝑗 ⋅ sin𝛼out,𝑗,
𝑄out,𝑥 = 𝑛∑𝑗=1𝑄out,𝑗 ⋅ cos𝛼out,𝑗.
(18)

Shock and Vibration 7
3.5. Damping. The damping coefficient 𝑐𝑏 of the balls result-ing from the built-up oil filmduring rotation is as follows [19]:
0.25 × 10−5 × 𝐾lin ≤ 𝑐𝑏 ≤ 2.5 × 10−5 × 𝐾lin. (19)
The shaft and housing damping coefficients are calculatedusing the following [20]:
𝑐𝑠 = LF ⋅ 𝐾𝑠𝜔ext, (20)
where𝐾lin is the linear stiffness of the bearing, the loss factorLF depends on the material, 𝜔ext is the excitation frequency,and 𝐾𝑠 is the stiffness of the support shaft, which can becalculated by the finite element software ANSYS. The valuesof the parameters in (19) and (20) are𝐾lin = 3.34 × 104N/mm,LF = 0.01,𝐾𝑠 = 3.70 × 104N/mm, and 𝜔ext = 30.
Thedamping forces between 𝑗th ball and the raceways canbe expressed as 𝐹𝑑,in,𝑗 = 𝑐𝑏 ⋅ 𝛿in,𝑗 and 𝐹𝑑,out,𝑗 = 𝑐𝑏 ⋅ 𝛿out,𝑗, andthe total contact damping forces acting on the inner and outerraceways in the 𝑥-axis and 𝑦-axis directions are given by
𝐹𝑑,in,𝑥 = 𝑛∑𝑗=1𝐹𝑑,in,𝑗 ⋅ cos𝛼in,𝑗,
𝐹𝑑,out,𝑥 = 𝑛∑𝑗=1𝐹𝑑,out,𝑗 ⋅ cos𝛼out,𝑗,
𝐹𝑑,in,𝑦 = 𝑛∑𝑗=1𝐹𝑑,in,𝑗 ⋅ sin𝛼in,𝑗,
𝐹𝑑,out,𝑦 = 𝑛∑𝑗=1𝐹𝑑,out,𝑗 ⋅ sin𝛼out,𝑗.
(21)
3.6. Vibration Equations of the Bearings. According to thebearing system model shown in Figure 2, the vibrationequations for the inner and outer rings of the ball bearing inthe 𝑥-axis and 𝑦-axis directions are as follows:
𝑀in ⋅ 𝑦in + 𝑐𝑠 ⋅ 𝑦in + 𝐾𝑠 ⋅ 𝑦in + 𝑄in,𝑦 + 𝐹𝑑,in,𝑦= −𝑀in𝑔,
𝑀in ⋅ ��in + 𝑐𝑠 ⋅ ��in + 𝐾𝑠 ⋅ 𝑥in + 𝑄in,𝑥 + 𝐹𝑑,in,𝑥 = 0,𝑀out ⋅ ��out + 𝐹𝑑,out,𝑥 − 𝑄out,𝑥 = 0,𝑀out ⋅ 𝑦out + 𝐹𝑑,out,𝑦 − 𝑄out,𝑦 = −𝑀out𝑔 − 𝐹𝑙,
(22)
where𝑀in is the mass of the inner ring and shaft,𝑀out is themass of the outer ring and housing, and 𝐹𝑙 is the gravitationalload. The vibration equation of the 𝑗th ball in the outer ring’sradial direction is given by
𝑚 ⋅ 𝛿out,𝑗 + 𝐹𝑑,out,𝑗 + 𝐹𝑑,in,𝑗 ⋅ cos (𝛼in,𝑗 − 𝛼out,𝑗)= −𝑄out,𝑗 + 𝑄in,𝑗 ⋅ cos (𝛼in,𝑗 − 𝛼out,𝑗) − 𝑚𝜔2𝑟, (23)
where 𝜔 = 2𝜋𝑓𝑐, the initial coordinates, velocities, andacceleration of the raceways and balls are set to reasonable
Table 1: Parameters of the type 6204 bearing.
Inner groove radius 4.088mmOuter groove radius 4.168mmInner raceway radius 13.281mmOuter raceway radius 21.226mmNumber of balls 8Ball radius 3.969mmRadial clearance 3.25 um
values, and the angular positions of the balls vary accordingto (4). The fourth-order Runge-Kutta algorithm is used tosolve (22) and (23) with the commercial software MATLABto calculate the motion parameters of each component. Thedamping and stiffness values in the numerical model aregiven as follows: 𝑐𝑠 = 0.74Ns/mm, 𝑐𝑏 = 0.8Ns/mm, 𝐾𝑖 = 8.98× 105N/mm3/2, and𝐾𝑜 = 8.98 × 105N/mm3/2. The flow chartof the numerical computation is shown in Figure 8.
4. Experimental Setup
The experimental rig and the bearing (Type 6204) are shownin Figure 9. The mass of the housing is 1.345 kg; additionalloads of 4.9N, 9.8N, 14.7N, and 19.6N are applied to thehousing in the vertical direction. When a ball passes over thedefect on the outer raceway, the periodic vibration responseis recorded by the acceleration sensor above the bearinghousing. The experimental vibration signals and the numer-ical signals are analysed by the resonance demodulationmethod, which is used to diagnose early fault defects ofrolling bearings; [21] introduces the theory of this method indetail.
The type 6204 bearing shown in Figure 9(b) has alocalized defect on the outer raceway. The defect is 0.2mmwide, 14.0mm long, and 1.0mm deep, and it is locatedvertically in the loaded region. The rotational frequency ofthe bearing is 1800 rpm. The bearing parameters are given inTable 1.
5. Experimental and Numerical Results
5.1. Comparison between Experimental Signals and Numer-ical Signals. Figure 10 shows the vibration responses ofthe experimental and numerical signals under the differentload conditions. The results show that, with an increase ofthe additional load, the amplitude of the vibration signalsincreases; because the bearing has a random vibration, thevibration amplitude of the numerical signals coincides some-what with the mean vibration amplitude of the experimentalsignals.
Figure 11 shows the frequency spectra of the experimen-tal and numerical signals under the different load condi-tions. For the ball bearing with a localized defect on theouter raceway, the theoretical fault characteristic frequency(ball pass frequency for the outer race) is 92.39Hz. Thevibration amplitude and frequency of the fault signals aregiven in Table 2. The fault characteristic frequencies of the

8 Shock and Vibration
Is the ball in defect area
Calculate ball-defect contact force (equations (7)–(15))
Calculate ball-raceway contact force (equations (16))
Calculate movement parameters and contact forces of bearing (equations (17)–(23))
Start
Calculate ball-raceway deformations (equations (4)–(6))
Is time t end?
End
Input bearing parametersand initial conditions
Yes No
Vibration response of bearing components
Yes
Not = t + Δt
Figure 8: Flow chart of the numerical computation.
Motor Accelerometer
Load
Defective bearing
(a) Experimental rig
Defect
(b) Localized defect on the outer raceway
Figure 9
experimental signals and the numerical signals are consistentand are very similar to the theoretical fault characteristicfrequency. The vibration amplitudes of the experimentaland numerical signals both increase with increases of theadditional load because a greater load will cause the impact
forces between the balls and the defect to increase, which willincrease the vibration amplitudes of the signals. In addition,the vibration amplitudes of the numerical signals are slightlygreater than those of the experimental signals. The defect’ssurface morphology may have an effect on the distribution of

Shock and Vibration 9
(h)(d)
(g)(c)
(f)(b)
(e)(a)
−4
−2
0
2
4A
mpl
itude
(m/s
2)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
−4
−2
0
2
4
Am
plitu
de (m
/s2)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4Time (s)
−4
−2
0
2
4
Am
plitu
de (m
/s2)
−4
−2
0
2
4
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
Am
plitu
de (m
/s2)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
−5
0
5
Am
plitu
de (m
/s2)
Am
plitu
de (m
/s2)
2
0
4
6
−4
−2
−6
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40Time (s)
−6
−4
−2
0
2
4
6
Am
plitu
de (m
/s2)
Am
plitu
de (m
/s2)
2
0
4
6
−4
−2
−6
Figure 10: Vibration responses of the experimental signals and the numerical signals under different loads. Experimental signals: (a) 4.9N,(b) 9.8N, (c) 14.7N, and (d) 19.6N. Numerical signals: (e) 4.9N, (f) 9.8N, (g) 14.7N, and (h) 19.6N.
Table 2: Comparison of the fault signals in Figure 11.
Load (N) Numerical signals Experimental signalsFrequency (Hz) Amplitude (m/s2) Frequency (Hz) Amplitude (m/s2)
4.9 92.19 85.92 92.19 60.499.8 92.19 119.7 92.19 74.6914.7 92.19 150.1 92.19 93.7419.6 92.19 184.9 92.97 169.4

10 Shock and Vibration
0 100 200 300 400 500Frequency (Hz)
(a)
(b)
(c)
(d)
(e)
(g)
(h)
X: 92.19Y: 60.49
0
20
40
60
80A
mpl
itude
(m/s
2)
X: 92.19Y: 85.92
0
50
100
100 200 300 400 5000Frequency (Hz)
Am
plitu
de (m
/s2)
Am
plitu
de (m
/s2)
Am
plitu
de (m
/s2)
X: 92.19Y: 74.69
0
50
100
100 200 300 400 5000Frequency (Hz)
Am
plitu
de (m
/s2)
X: 92.19Y: 119.7
0
50
100
150
100 200 300 400 5000Frequency (Hz)
X: 92.19Y: 93.74
100 200 300 400 5000Frequency (Hz)
X: 92.97Y: 169.4
100 200 300 400 5000Frequency (Hz)
0
100
200X: 92.19Y: 184.9
0
50
100
Am
plitu
de (m
/s2)
Am
plitu
de (m
/s2)
0
50
100
150
200
100 200 300 400 5000Frequency (Hz)
X: 92.19Y: 150.1
100 200 300 400 5000Frequnecy(Hz)
0
50
100
150
200A
mpl
itude
(m/s
2)
Figure 11: Frequency spectra of the experimental signals and the numerical signals under different loads. Experimental signals: (a) 4.9N, (b)9.8N, (c) 14.7N, and (d) 19.6N. Numerical signals: (e) 4.9N, (f) 9.8N, (g) 14.7N, and (h) 19.6N.
the contact stress and the shape of the contact area; this effectwill be studied in future articles.
5.2. Comparison between the Proposed Modeland the Traditional Model
5.2.1. Sinking Depth of the Balls. In contrast to the traditionalmodel, which only considers the effect of the defect sizeon the sinking depth of balls in the defect area, the modelproposed in this paper considers both the defect size and theload. Figure 12 shows the relationships among the maximumsinking depth of the balls, the size of the defect, and theload for the traditional model and the proposed model.The sinking depth of the ball in the traditional model is
independent of the load, whereas, in the proposedmodel, themaximum sinking depth increases with increases of the loadand the size of the defect.
The paths of the balls passing through the defect areaunder different loads calculated with the proposed model areshown in Figure 13. The sinking depths of the balls increasewith increasing load.The sinking depths of the balls shown inFigure 13 are listed in Table 3; the trend is consistent with thatin Figure 12(b) because a greater applied load causes greateracceleration and velocity of the balls, as shown in Figures 14and 15.
Table 4 shows the relationships between the contactellipse and the sinking depth of the ball. In Figure 13, thesinking depth of the ball ranges between 0.8 × 10−3mm and

Shock and Vibration 11
Table 3: Relationship between the additional load and the change of the sinking depth of the balls in Figure 13.
Additional load (N) Change of sinking depth Δ (10−3mm)Traditional model Proposed model
4.9
1.26
0.709.8 0.8014.7 0.9119.6 1.02
040
1
0.3Load (N) Size (mm)
20 0.2
2
0.10 0
Def
orm
atio
n(m
m)
×10−3
(a) Traditional model
Load (N)
400.3
Def
orm
atio
n(m
m)
20 0.2
0
0.005
0.01
0.10 0 Size (mm)
(b) Proposed model
Figure 12: Maximum sinking depth of the balls at the centre of the defect.
0.108 0.1081 0.1082 0.1083 0.1084 0.1085
−2
−1.5
−1
−0.5
Path
(mm
)
4.9 N9.8 N
Time (s)
14.7N19.6 N
×10−3
Figure 13: Paths of the balls passing through the defect area underdifferent loads.
2.2 × 10−3mm; the values of the semimajor and semiminoraxes of the contact ellipse based on this range are given inTable 4. When the sinking depth of the ball is 0.8 × 10−3mm,the ball does not enter the defect; at this stage, the semiminoraxis of the contact area is 0.0485 × 2 = 0.097mm, and thewidth of the defect is 0.2mm. The size of the contact ellipseis clearly nonnegligible because the ball-raceway contactforce was affected by the defect before the ball enters thedefect.
When the sinking depth of the ball is 2.2 × 10−3mm, thesemiminor axis of the contact area is 0.0805 × 2 = 0.1610mm,which is smaller than the width of the defect, so there isno contact between the ball and the defect edges when theball is in the centre of the defect; at this stage, contact forcebetween the ball and the outer raceway is zero. The ball hasleft the defect area on the outer raceway before it reaches themaximum sinking depth 6 × 10−3mm.
In general, the sinking depth in Figure 12(b) is themaximumsinking depthwhen the ball stays at the defect area.In Figure 13, the ball has a velocity when it passes through thedefect area, the movement of the ball will affect the paths ofthe balls.
5.2.2. Contact Force. The ball-raceway contact forces of thetraditional and proposedmodels in the defect area under dif-ferent loads are shown in Figure 16. In the traditional model,the contact force changes suddenly when the ball enters andleaves the defect area, whereas there is a continuous andgradual change in the proposedmodel.The traditionalmodelpresented in this paper is only a basic model; the contactforces of the traditionalmodels in [11, 12] also have nonabruptchanges. We do not compare the differences between thechanging processes of the contact forces in the proposedmodel and the traditional models. Whether the traditionalmodel or the proposed model is used, the change of thecontact forces increases with an increase in the applied load.There are two other differences between these two models.(1)The duration of the change in the contact force in thedefect area in the proposed model is greater than that in thetraditional models.(2) The change of the contact force in the traditionalmodel is smaller than that in the proposed model; when theball is at the centre of the defect, the contact force betweenthe ball and the raceway is zero in the new model.
The reasons for these differences are as follows.(1) The traditional model neglects the contact areasbetween the ball and the raceways; a change occurs onlywhenthe centre of the ball enters the defect.(2)When the minor axis of the contact ellipse is smallerthan the size of the defect, the ball cannot come into contactwith the raceway when it passes over the defect; thus, thecontact force becomes zero.

12 Shock and Vibration
0.1 0.2 0.3 0.4 0.5 0.6Time (s)
Am
plitu
de (m
/s)
−15
−10
−5
0
5
10
15
(a)
0.2 0.3 0.4 0.5 0.60.1Time (s)
Am
plitu
de (m
/s)
−15
−10
−5
0
5
10
15
(b)
−15
−10
−5
0
5
10
15
Am
plitu
de (m
/s)
0.2 0.3 0.4 0.5 0.60.1Time (s)
(c)
0.2 0.3 0.4 0.5 0.60.1Time (s)
−15
−10
−5
0
5
10
15
Am
plitu
de (m
/s)
(d)
Figure 14: Velocities of the balls in the radial direction in the defect area under different loads: (a) 4.9N, (b) 9.8N, (c) 14.7N, and (d) 19.6N.
X: 11.72Y: 0.01997
0
0.01
0.02
0.03
Am
plitu
de (m
/s)
20 30 40 5010Frequency (Hz)
(a)
X: 11.72Y: 0.02157
0
0.01
0.02
0.03
Am
plitu
de (m
/s)
20 30 40 5010Frequency (Hz)
(b)
X: 11.72Y: 0.02471
0
0.01
0.02
0.03
Am
plitu
de (m
/s)
20 30 40 5010Frequency (Hz)
(c)
X: 11.72Y: 0.0261
0
0.01
0.02
0.03
Am
plitu
de (m
/s)
20 30 40 5010Frequency (Hz)
(d)
Figure 15: The spectra of velocities of the balls in the radial direction in the defect area under different loads: (a) 4.9N, (b) 9.8N, (c) 14.7N,and (d) 19.6N.
In Figure 16(a), the duration of the change in the contactforce is the time required for the ball to pass over the defect.The width of the defect is 2𝐿, and the velocity of the ball is2𝜋𝑓𝑐𝑅𝑜; therefore, the duration of the change in the contactforce in the defect area is 𝐿/𝜋𝑓𝑐𝑅𝑜. For the experiment in thisarticle, the duration is 1.298 × 10−4 s.
As shown in Figure 16(b), the duration of the change inthe contact force is greater than that in the traditional model.
When the ball is still far from the defect edge, the contactforce decreases. In the proposed model, this distance is thesemiminor axis of the contact ellipse, the time for the ballto travel this distance is 𝑏/2𝜋𝑓𝑐𝑅𝑜, and the total duration ofthe change in the contact force when the ball passes over thedefect is (𝐿 + 𝑏)/𝜋𝑓𝑐𝑅𝑜. The value of the semiminor axis ofthe contact ellipse is constantly changing and is determinedby the applied load on the ball. Therefore, with an increase of

Shock and Vibration 13
Table 4: Relationships of Δ-𝑎-𝑏.Sinking depth (10−3mm) Semimajor axis a (mm) Semiminor axis b (mm)0.8 0.3046 0.04851.0 0.3405 0.05431.2 0.3730 0.05951.4 0.4029 0.06421.6 0.4307 0.06871.8 0.4569 0.07282.0 0.4816 0.07682.2 0.5051 0.0805
4.9 N9.8 N14.7 N
19.6Ndefect
0.1082 0.1083 0.10840.1081Time (s)
0
20
40
Forc
e (N
)
(a) Traditional model
4.9 N9.8 N14.7 N
19.6Ndefect
0.1082 0.1083 0.10840.1081Time (s)
0
20
40
Forc
e (N
)
b/2fcRo
b/2fcRo
(b) Proposed model
Figure 16: Ball-raceway contact forces in the defect area under different loads.
the applied additional load (from 4.9N to 19.6N), the totalduration of the change in the contact force becomes longer.
6. Conclusions
Amodel for predicting the vibration response of ball bearingswith a localized defect based on the Hertzian contact stressdistribution is proposed. The mechanism of the vibrationresponse in the defect area and the solution method of thetraditional model are analysed. The Hertzian contact stressdistribution and the contact area are used to calculate theball-raceway contact force in the defect area. An experimentusing a ball bearing with a defect in the outer raceway isperformed, and the vibration responses of the experimentaland numerical signals are compared to verify the applicabilityof the proposedmodel. Comparisons between the traditionalmodel and the proposed model show that, unlike in thetraditional model, in the proposed model, with an increasein the applied load, the sinking depth of balls in the defectarea increases, and the contact force begins to change beforethe ball enters the defect region and stops changing after theball leaves the defect region.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
This work was supported by the National Natural Sci-ence Foundation of China (51175102) and the Fundamental
Research Funds for the Central Universities (Grant no.HIT.NSRIF.201638).
References
[1] S. Singh, C. Q. Howard, and C. H. Hansen, “An extensivereview of vibration modelling of rolling element bearings withlocalised and extended defects,” Journal of Sound and Vibration,vol. 357, pp. 300–330, 2015.
[2] P. D. McFadden and J. D. Smith, “Model for the vibrationproduced by a single point defect in a rolling element bearing,”Journal of Sound and Vibration, vol. 96, no. 1, pp. 69–82, 1984.
[3] P. D. McFadden and J. D. Smith, “The vibration produced bymultiple point defects in a rolling element bearing,” Journal ofSound and Vibration, vol. 98, no. 2, pp. 263–273, 1985.
[4] A. Rafsanjani, S. Abbasion, A. Farshidianfar, andH.Moeenfard,“Nonlinear dynamic modeling of surface defects in rollingelement bearing systems,” Journal of Sound and Vibration, vol.319, no. 3–5, pp. 1150–1174, 2009.
[5] N. Tandon and A. Choudhury, “An analytical model for theprediction of the vibration response of rolling element bearingsdue to a localized defect,” Journal of Sound and Vibration, vol.205, no. 3, pp. 275–292, 1997.
[6] A. Choudhury and N. Tandon, “Vibration response of rollingelement bearings in a rotor bearing system to a local defectunder radial load,” Journal of Tribology, vol. 128, no. 2, pp. 252–261, 2006.
[7] N. Sawalhi and R. B. Randall, “Simulating gear and bearinginteractions in the presence of faults. Part I. The combined gearbearing dynamic model and the simulation of localised bearingfaults,”Mechanical Systems and Signal Processing, vol. 22, no. 8,pp. 1924–1951, 2008.

14 Shock and Vibration
[8] N. Sawalhi and R. B. Randall, “Simulating gear and bearinginteractions in the presence of faults. Part II. Simulation of thevibrations produced by extended bearing faults,” MechanicalSystems and Signal Processing, vol. 22, no. 8, pp. 1952–1966, 2008.
[9] N. S. Feng, E. J. Hahn, and R. B. Randall, “Using transientanalysis software to simulate vibration signals due to rollingelement bearing defects,”AppliedMechanics, pp. 689–694, 2002.
[10] V. N. Patel, N. Tandon, and R. K. Pandey, “A dynamic model forvibration studies of deep groove ball bearings considering singleand multiple defects in races,” Journal of Tribology, vol. 132, no.4, Article ID 041101, 10 pages, 2010.
[11] V. N. Patel, N. Tandon, and R. K. Pandey, “Vibration studiesof dynamically loaded deep groove ball bearings in presence oflocal defects on races,” in Proceedings of the 2013 InternationalConference on Design and Manufacturing, IConDM 2013, pp.1582–1591, India, July 2013.
[12] M. S. Patil, J. Mathew, P. K. Rajendrakumar, and S. Desai, “Atheoretical model to predict the effect of localized defect onvibrations associated with ball bearing,” International Journal ofMechanical Sciences, vol. 52, no. 9, pp. 1193–1201, 2010.
[13] A. Moazen Ahmadi, D. Petersen, and C. Howard, “A non-linear dynamic vibration model of defective bearings - Theimportance of modelling the finite size of rolling elements,”Mechanical Systems and Signal Processing, vol. 52-53, no. 1, pp.309–326, 2015.
[14] J. Liu, Y. Shao, and T. C. Lim, “Vibration analysis of ball bearingswith a localized defect applying piecewise response function,”Mechanism and Machine Theory, vol. 56, pp. 156–169, 2012.
[15] J. L.Gomez,A. Bourdon,H.Andre, andD.Remond, “Modellingdeep groove ball bearing localized defects inducing instanta-neous angular speed variations,”Tribology International, vol. 98,pp. 270–281, 2016.
[16] C.Mishra, A. K. Samantaray, and G. Chakraborty, “Ball bearingdefect models: A study of simulated and experimental faultsignatures,” Journal of Sound and Vibration, vol. 400, pp. 86–112,2017.
[17] A. Chen and T. R. Kurfess, “A new model for rolling elementbearing defect size estimation,”Measurement, vol. 114, pp. 144–149, 2018.
[18] T. A. Harris, Rolling Bearing Analysis, Wiley, 1984.[19] S. Khanam, J. K. Dutt, and N. Tandon, “Impact force based
model for bearing local fault identification,” Journal of Vibrationand Acoustics, vol. 137, no. 5, Article ID 051002, 2015.
[20] G. Genta, “On a persistent misunderstanding of the role ofhysteretic damping in rotordynamics,” Journal of Vibration andAcoustics, vol. 126, no. 3, pp. 459–461, 2004.
[21] D. R. Harting, “Incipient failure detection by demodulatedresonance analysis,” Instrumentation Technology, vol. 9, pp. 59–63, 1977.

International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com