6/16/2015©Zachary Wartell 2D Coordinate Systems, Change of Coordinates, and Matrices Revision:...
37
03/27/22 ©Zachary Wartell 2D Coordinate Systems, Change of Coordinates, and Matrices Revision: 1/8/2008 6:14:11 PM Copyright Zachary Wartell, University of North Carolina All Rights Reserved Textbook: Chapter 5 and Appendix
-
date post
20-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of 6/16/2015©Zachary Wartell 2D Coordinate Systems, Change of Coordinates, and Matrices Revision:...

04/18/23©Zachary Wartell
2D Coordinate Systems,Change of Coordinates,
and Matrices
Revision: 1/8/2008 6:14:11 PMCopyright Zachary Wartell, University of North Carolina
All Rights Reserved
Textbook:Chapter 5 and Appendix

04/18/23©Zachary Wartell
Overview
• points, vectors, alignments & coordinates thereof• coordinate systems & coordinates thereof• change of coordinates for pt’s, vt’s

04/18/23©Zachary Wartell
Geometric Point
• Point – a location in space

04/18/23©Zachary Wartell
• Consider points in 1D space, drawn as a dot
• We also have 1D distance, drawn as a line segment
– Note, any line segment of the right length is a valid drawing of a given distance
Distance (in 1D space)
0 1 ….
d=2 d=2
l0=[0,2]0 1 ….
l1=[4.5,6.5]
d=2 d=2
l0=[0,2]0 1 ….
l1=[4.5,6.5]
d=2
l2=[5.5,7.5]

04/18/23©Zachary Wartell
• Displacement in 1D space is a “signed” distance, drawn as an directed line segment (also an ‘arrow’)
– Note, any directed line segment of the correct length and direction is a valid drawing of a given displacement
Displacement (in 1D space)
d=2 1/3 d=-1.75
l2=[6,4.25]l2=[0,2 1/3]
d=1.75
l1=[2,3.75]0 1
d=-1.75
l2=[6,4.25]
d=-1.75
l1=[3.75,2]0 1
d=-1.75
l3=[2.25,1.5]
04/18/23©Zachary Wartell
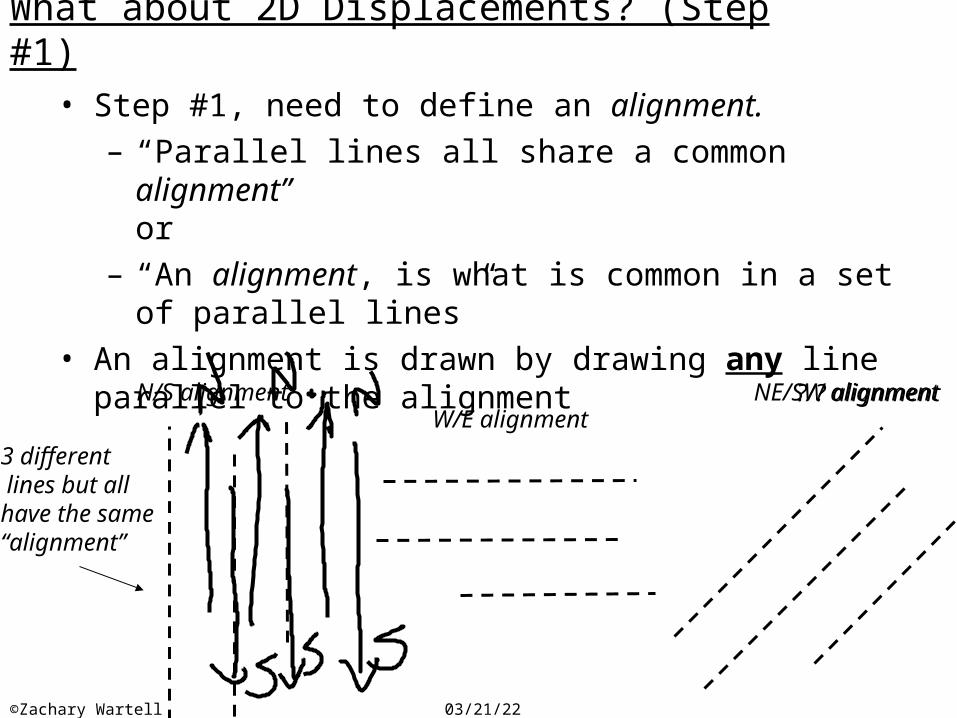
What about 2D Displacements? (Step #1)
• Step #1, need to define an alignment. – “Parallel lines all share a common alignment”
or– “An alignment, is what is common in a set of
parallel lines”• An alignment is drawn by drawing any line
parallel to the alignment
W/E alignment?/? alignmentNE/SW alignmentN/S alignment
3 different lines but all have the same “alignment”

04/18/23©Zachary Wartell
• geometric vectors are “2D displacements” or “direction with sign and magnitude” -- drawn by an (2D) directed line segment (‘arrow’)– Note, any arrow of the right length and
alignment is valid drawing of a given geometric vector
2D Displacements are called ‘geometric vectors’
Length=5
“Move North 5 meters”
Length=7“Move NW 7 meters” “Move SE 7 meters”
Leng
th=7
3 different arrowsbut all representativeof the same vector

04/18/23©Zachary Wartell
Geometric Vector versus Alignment
∙ a geometric vector gives more information than an alignment
Alignment is N/SVector is N at magnitude l
l this vector has same alignment as this one but different magnitude

04/18/23©Zachary Wartell
Please draw point (5,3)
?

04/18/23©Zachary Wartell
Point (5,3)A
(5,3)
A
“regular” recti-linear coordinate system (syn. Cartesian coordinate system)

04/18/23©Zachary Wartell
Point (5,3)B
(5,3)
(5,3)

04/18/23©Zachary Wartell
(5,3)
Point (5,3)C
(5,3)
(5,3)

04/18/23©Zachary Wartell
Point (5,3)D
(5,3)
(5,3)
(5,3)(5,3)
oblique (!) recti-linear coordinatesystem

04/18/23©Zachary Wartell
Please draw vector (3,2)
?

04/18/23©Zachary Wartell
Vector (3,2)A
(3,2)
04/18/23©Zachary Wartell
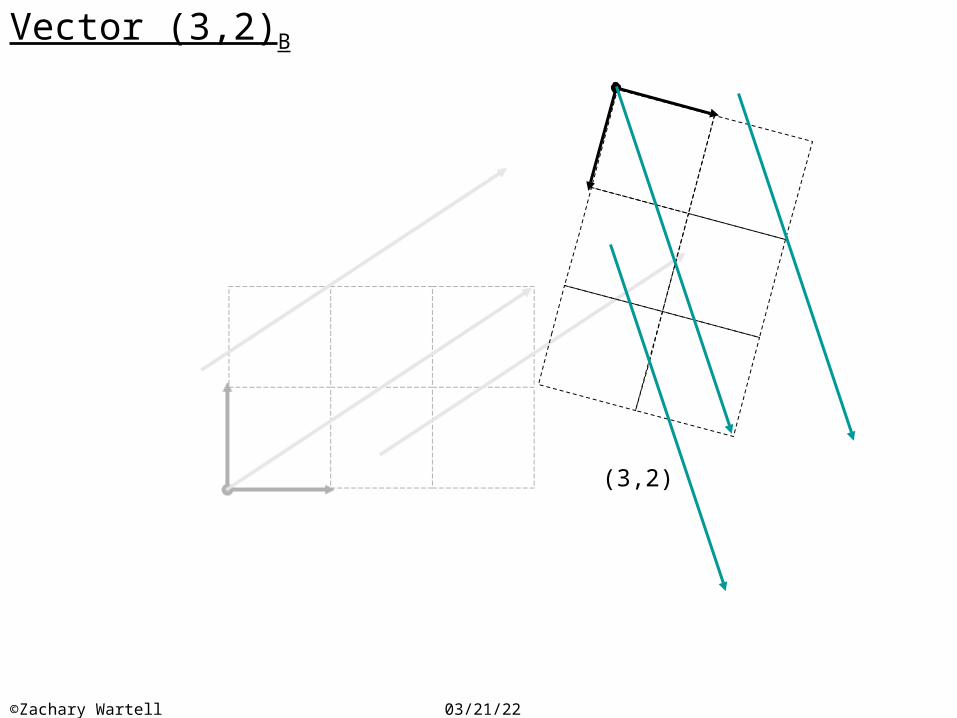
Vector (3,2)B
(3,2)
04/18/23©Zachary Wartell
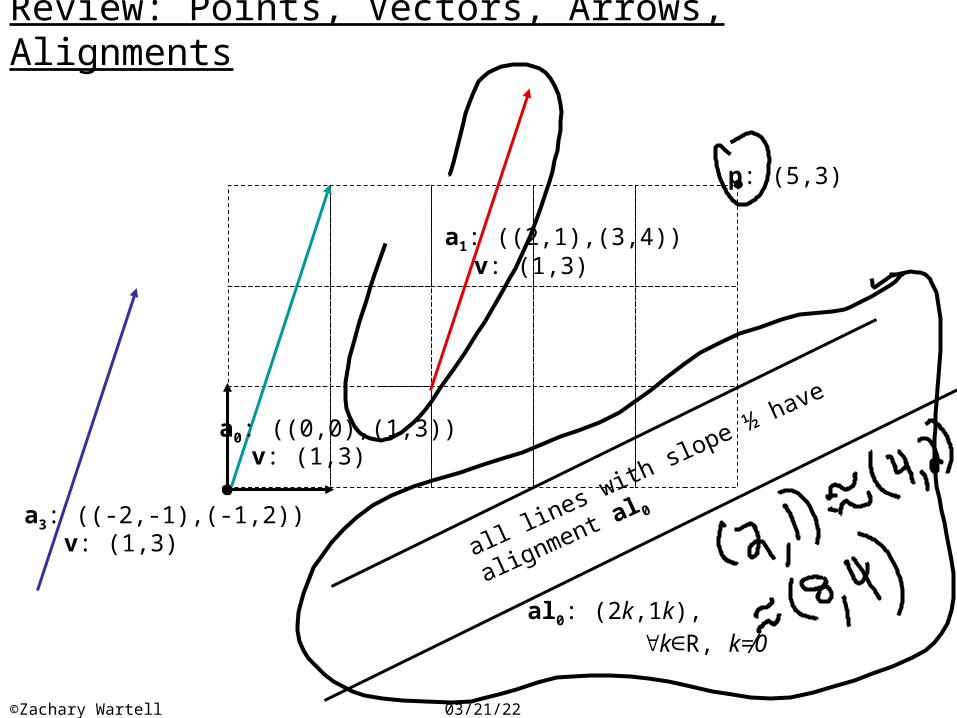
Review: Points, Vectors, Arrows, Alignments
p: (5,3)
v: (1,3)
v: (1,3)
v: (1,3)
a0: ((0,0),(1,3))
a1: ((2,1),(3,4))
a3: ((-2,-1),(-1,2))
al0: (2k,1k), k∈R, k≠0
all lines with slope ½ have
alignment al 0

04/18/23©Zachary Wartell
DOF’s of 2D Elements
Element Degrees of freedom
Point 2 DOF
Vector 2 DOF
Arrow 4 DOF
Alignment 1 DOF

04/18/23©Zachary Wartell
Operation on Points & Vectors (2D or 3D)
• Points: pi - pj = v pi ± v = pj (p + 0 = p) tpi + (1-t)pj = pk - “affine combination”
• Vectors: vi ±vj = vk , vj = a ∙ vk (a R) or avi ± bvj = vk - ”linear combination”
length(v), |v| =
normalize(v), v'= (1/|v|) ∙ v dot product: vivj =
2 2 2x y z
cos
j
i i i j i j i j i j
j
i j
x
x y z y x x y y z z
z
v v

04/18/23©Zachary Wartell
Notation
(5,3)A
A,B,C – capital script letter is a coordinate system
(x,y)B or (xB,yB) – is a coordinate with respect to coordinate system B
A
Coordinate System is a 3-tuple, (o,x,y)o : a point called the originx : a vector called x-basis vectory : a vector called y-basis vector
o x
y

04/18/23©Zachary Wartell
Different Point/Coordinate & Same Coordinate/Point
• So far we’ve looked at different points with the same coordinate but conversely we can considered the same point with different coordinates! (5,3)
(5,3)
(5,3)(5,3)
(5,3)
(5,3)
(5,3)(5,3)

04/18/23©Zachary Wartell
(3,3)B, (1.33,0.33)A
Coordinates of point p
B
A
p

04/18/23©Zachary Wartell
Coordinates of Coordinate System A relative to B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
Equivalent Questions:What is MB←A? -- “A to B"Where is A (as measured) in B? How do I superimpose B onto A?
(3,3)B, (1.33,0.33)Ap

04/18/23©Zachary Wartell
What is Minches←feet?
1D linear transform:
12 1/12
12 1/12
s s
M M
p M p p M p
p p
inches feet inches feet feet inches feet inches
inches inches feet feet feet feet inches inches
feet inches
p with coordinates (0.4)feet or(4.8)inches0inches unit vector
feet unit vector
Where is Feet in Inches? How to superimpose Inches onto Feet?

04/18/23©Zachary Wartell
Where is Celsius in Fahrenheit?How to superimpose Fahrenheit onto Celsius?
1D affine transform:
9 / 5 32 5 / 9 17.7
s t s t
M p M p
p p p p
far cel far cel cel far cel cel far cel far cel cel far
far cel cel far
p with coordinates (-8.81)cel or (16)far0far
fahrenheit unit vector & origin
celsius unit vector & origin
0cel,32far
scale by 9/5add 32 ‘s
What is Mfar←cel?

04/18/23©Zachary Wartell
Review: Matrices (1)
11 12 1
21 2
1 2
11
11 1
1
is a by matrix
, is a 'column matrix', is a 'row matrix'
Matrix Addition
is by , is by , is by
c
c
r r rc
c
r
ij ij
m m m
m mr c
m m m
v
v v
v
m n m n m n
c a b
M M
V U V U
C A B C A B
1
Matrix Multiplication:
is by , is by , is by
ij
n
ij ik kjk
m q m n p q
n p
c a b
C A BC AB

04/18/23©Zachary Wartell
Review: Matrices (2)
T
T T T
Property: Non-commutative:
Property: Distributive
Operation: Transpose
: where is by and is by
Property:
=
Operation: Determinant
det : , w
ij ji
m n n m
a b
AB BA
A B C AB AC
A B A B
AB B A
A A R
11 1211 22 21 12
21 22
11 12 13
21 22 231
31 32 33
1
here is by
det
det 1 det Ex:
1 det
nj k
jk jkj
nj k
jk jkk
n n
a aa a a a
a a
a a a
a a a a
a a a
a
A
A
A A
A

04/18/23©Zachary Wartell
Review: Matrices (3)
-1
1 1
1
Property:
det ( ) det det
Definition: Identity
1 0 0 0
0 1 0 0,
0 0 0
0 0 0 1
Operation: Inverse
: , where , are by and det 0 ( is 'non-singular')
1 det
det
j k
jkkj
n n
m
AB A B
I M I M
A B B A A B B B
M M M M I
M
M

04/18/23©Zachary Wartell
Review: Matrices (4)
Given two or more functions we 'compose' them by applying the result of one as
the input of the other
G( ), F( )
Then we might have
G(F( )), or F(G( )),
y x y x
x x
Operation : Composition (General)
F
or F(F(G(F( )))), etc...
We can use matrices to represent functions on column (or row) vectors.
G( ), where ,
F( ), where ,
Then we mi
x
G
Operation : Composition (Matrix)
y x y M x
y x y M x
F
F G
F G G F
ght have:
G(F( ))=
F(G( ))=
F(G(G(F( ))=
....etc...
Gx M M x
x M M x
x M M M M x

04/18/23©Zachary Wartell
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
Where is A in B?
A.x = ( 1/√2, 1/√2)A.y = (-1/√2, 1/√2)A.o = (2.5, 1.5)
Where is A in B? = What is MB←A?
1 2 1 2 2.5:
1.51 2 1 2
((0,0) ) (2.5,1.5)
((1,2) ) (1.79,3.62)
p
p
p
x x
y y
M
M
M
B A
B A
B A
B A
B A
A B
A B
(1,2)A, (1.79,3.62)B
p for “point”

04/18/23©Zachary Wartell
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
1 2 1 2 2.5:
1.51 2 1 2
((1,0) ) (1 2 ,1 2)
((0,1) ) ( 1 2 ,1 2)
V
V
V
x x
y y
M
M
M
B AB A
B A
B A A B
B A A B
What about the vectors?
Where is A in B?
A.x = ( 1/√2, 1/√2)A.y = (-1/√2, 1/√2)A.o = (2.5, 1.5)
Where is A in B? = What is MB←A? - vectors
V for “vector”

04/18/23©Zachary Wartell
More Compact:
1 2 1 2 2.5
: 1 2 1 2 1.5
0 0 1
where 1 for a point
0 for a vector
x x
y y
w w
w
w
MB A
B A B A
(1.79,3.62)
Where is A in B?
A.y = ( 1/√2, 1/√2)A.x = (-1/√2, 1/√2)A.o = (2.5, 1.5)
Compact Representation
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B

04/18/23©Zachary Wartell
GeneralizationIn General:
- point
1 0 0 1 1:
- vector
0 0 0 1 0
x x x
y y y
x x x
y y y
x x
y y
x x
y y
.x .y .o
.x .y .o
M.x .y .o
.x .y .o
B A
B A
B A
B A
B A
A A A
A A A
A A A
A A A B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
If I were being absurdly pedantic what sub-sub-script should go under the sub-scripts x,y,z? Answer:
x.xB
A
04/18/23©Zachary Wartell
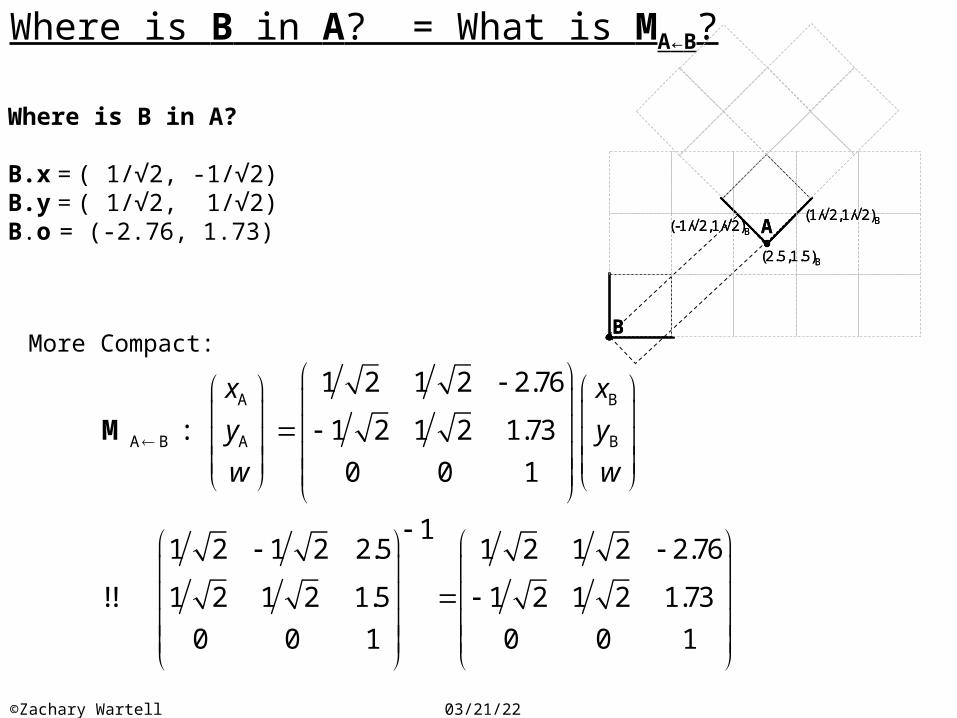
Where is B in A? = What is MA←B?
More Compact:
1 2 1 2 2.76
: 1 2 1 2 1.73
0 0 1
11 2 1 2 2.5 1 2 1 2 2.76
!! 1 2 1 2 1.5 1 2 1 2 1.73
0 0 1 0 0 1
x x
y y
w w
MA B
A B A B
Where is B in A?
B.x = ( 1/√2, -1/√2)B.y = ( 1/√2, 1/√2)B.o = (-2.76, 1.73)
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B

04/18/23©Zachary Wartell
What is relationship of MA←B and MB←A?
1 1
11 2 1 2 2.5 1 2 1 2 2.76
1 2 1 2 1.5 1 2 1 2 1.73
0 0 1 0 0 1
In general:
,
M M M MA B B A A B B A -generally inverse computation requires expensive Gaussian elimination. But in various specific cases (translate, scale, rotate) inverse computation can be quick!
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B
B
A(2.5,1.5)B
(1/√2,1/√2)B(-1/√2,1/√2)B

04/18/23©Zachary Wartell
Revisions1.1
1. Added slide 132. Added Overview Slide3. Added explicit slide referencing “ITCS 4120-2D Transforms.ppt”4. re-ordered slides to better suit insertion of “ITCS 4120-2D Transforms.ppt”5. added 1D change of coordinates slides
1.2 -typos1.3 -added Matrix: Review slides1.4 -moved affine transform slides to other .ppt file -added DOF slide
-added ‘superimpose’ terminology to coordinate transform slides

04/18/23©Zachary Wartell
Alternative Convention MB←A and M A ←B
1 0 0
0 1 0
0 0 1 0 0 1 0 0 1
If and basis vectors have same interior angle (i.e. they are not sheared relative to e
x x x x x x
y y y yy y
.x .y .o .o .x .y
M .x .y .o .o .x .yB A
A A A A A A
A A A A A A
A B
11
ach other), then
1 0 0 0/ / 0
0 1 0 00 0 1
0 0 1 0 0 1
, where , and are a translation, rotation, and scale.
Now,
( )
x
y
.o .x.x .x .y .y
.o .y
T R S T R S
M M T R S
S
B A B A B A
B A A B A B A B A B
A B
A AA A A A
A A
1 1 1
1 1 1
Similarly we could write:
Note that here we've written by taking S,R, &T component matrices from . This is an alternative approach
used in some text
R T
M S R T
M M
A B A B
A B B A B A B A
A B B A
's (Hearn&Baker). This convention can be somewhat counter-intuitive. Why build by using inverse S,R,T
components . Is it not more intuitive build from it's own S,R,T components? So while
M
MA B
B A
1 1 1
1 1 1
the following are both correct
the T,R,S expression feels more intuitive than the S,R,T expression:
M T R S
S R T
M T R S
S R T
B A B A B A B A
A B A B A B
A B A B A B A B
B A B A B A