
5. Numerische Differentiation und Integrationueberholz/Lehre/NumInf1/numinf_5... · Ableitungen in...
39
5. Numerische Differentiation und Integration 1
-
Upload
vuongtuong -
Category
Documents
-
view
214 -
download
0
Transcript of 5. Numerische Differentiation und Integrationueberholz/Lehre/NumInf1/numinf_5... · Ableitungen in...

5. Numerische Differentiation
und Integration
1

Numerische Differentiation
Problemstellung:Gegeben ist eine differenzierbare Funktion f : [a, b] → R und x ∈ (a, b).Gesucht sind Naherungen fur die Ableitungen f(n)(x)
Grundlage:
• Ableitung:
d
dxf(x) = f
′(x) = lim
h→0
f(x+ h)− f(x)
h
• Der Satz von Taylor:
f(x0+h) = f(x0)+n−1∑
i=1
f(i)(x0)·hi
i!+f(n)(z)·h
n
n!mit z ∈ [x0, x0+h],
dient zur Fehlerabschatzung und Herleitung von Differenzenfor-meln
2
Ableitung 1. Ordnung (1)
Einfachste Naherung: der Differenzenquotient an der Stelle x0
f′(x0) ≈ f(x0 + h)− f(x0)
h=: D1f(x0, h)
D1 wird auch als Differenzformel oder finite Differenz erster Ordnungbezeichnet.
Problem (Ubungen):
• Rundungsfehler
≈ 2|f(x0)|ǫm1
h
• Diskretisierungsfehler
≈ |f ′′(x0)|2
· h
• Optimum
h ≈√
√
√
√4ǫm|f(x0)||f ′′(x0)|
3
Ableitung 1. Ordnung (2)
Frage: Geht das besser?
• Rundungsfehler :
float → double → long double → . . .
• Diskretisierungsfehler:
Wahle Differenzen mit Diskretisierungsfehler O(hk) mit k > 1.
• Dies ergibt bei großeren h
* einen kleineren Rundungsfehler, da ∝ 1/h
* und einen großeren Diskretisierungsfehler, da ∝ hk
4
Ableitung 1. Ordnung (3)
Taylor-Entwicklung
f(x0 + h) = f(x0) + f ′(x0)h+f ′′(x0)
2h2 +
f(3)(x0)
6h3
+f(4)(x0)
24h4 +O(h5)
f(x0 + h/2) = f(x0) + f ′(x0)(
h
2
)
+f ′′(x0)
2
(
h
2
)2
+f(3)(x0)
6
(
h
2
)3
+f(4)(x0)
24
(
h
2
)4
+O(h5)
f(x0 − h) = f(x0)− f ′(x0)h+f ′′(x0)
2h2 − f(3)(x0)
6h3
+f(4)(x0)
24h4 +O(h5)
5

Ableitung 1. Ordnung (4)
Subtraktion:
f(x0 + h)− f(x0 − h) = 2f ′(x0)h+f(3)(x0)
3h3 +O(h5)
Zentraler Differenzenquotient
D2f(x0, h) :=f(x0 + h)− f(x0 − h)
2h
Fehler:
D2f(x0, h)− f ′(x0) =f(3)(x0)
6h2 +O(h4)
Es tauchen wegen der Symmetrie in h nur gerade Potenzen in der
Taylor-Entwicklung von D2f(x0, h) auf.
6

Ableitung mit Extrapolation (1)
Kombiniere D1f(x0, h) und D1f(x0, h/2) zu
D1f(x0, h)− f ′(x0) =f ′′(x0)
2h+
f(3)(x0)
6h2 +O(h3)
2 ·(
D1f(x0, h/2)− f ′(x0))
=f ′′(x0)
2h+
f(3)(x0)
12h2 +O(h3)
Differenzformel der Ordnung 2
D∗1f(x0, h) := 2D1f(x0, h/2)−D1f(x0, h)
= 2f(x0 + h/2)− f(x0)
h/2− f(x0 + h)− f(x0)
h
=4f(x0 + h/2)− 3f(x0)− f(x+ h)
h
7
Ableitung mit Extrapolation (2)
Fehler:
D∗1f(x0, h)− f ′(x0) = 2D1f(x0, h/2)−D1f(x0, h)− f ′(x0)
= 2(
D1f(x0, h/2)− f ′(x0))
−(
D1f(x0, h)− f ′(x0))
= −f(3)(x0)
12h2 +O(h3)
Diese Art der Erhohung der Fehlerordnung gilt ganz allgemein.
Ausgangspunkt ist die Berechnung von D∗1 fur h, h/2, h/4, h/8, . . ., aus
denen Kombinationen berechnet werden mit einem Fehler in hoherer
Ordnung in h, diese werden dann immer weiter kombiniert, bis die
Maschinengenauigkeit erreicht ist.
8

Ableitung mit Extrapolation (3)
Beispiel fur den ersten Schritt:
D∗1f (x0, h)− f ′(x0) = −f(3)(x0)
12h2 +O(h3)
D∗1f
(
x0,h
2
)
− f ′(x0) = −f(3)(x0)
12
(
h
2
)2
+O(h3)
Der Ausdruck 4D∗1f(x0,
h2)−D∗
1f(x0, h) beseitigt den Term proportional
zu h2:
4D∗1f
(
x0,h
2
)
−D∗1f (x0, h) = 4f ′(x0)− 4
f(3)(x0)
12
(
h
2
)2
+4O(h3)−
f ′(x0) +f(3)(x0)
12h2 −O(h3)
= 3f ′(x0) +O(h3)
3
9
Ableitung mit Extrapolation (4)
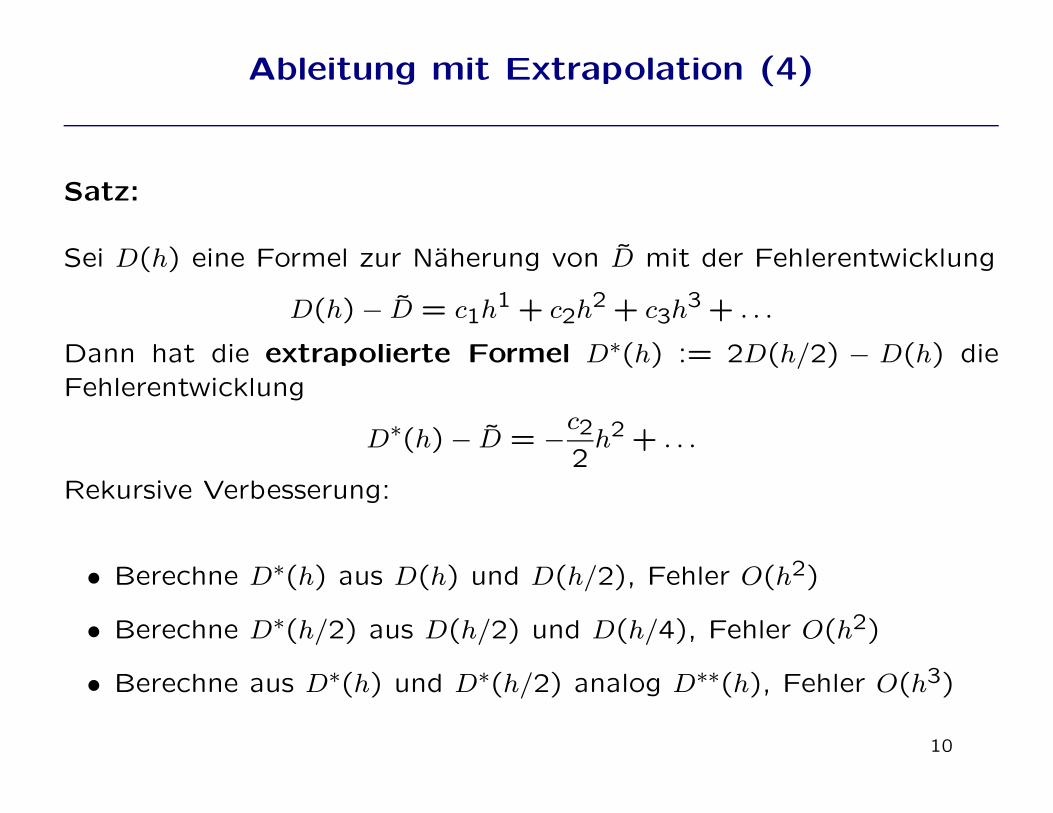
Satz:
Sei D(h) eine Formel zur Naherung von D mit der Fehlerentwicklung
D(h)− D = c1h1 + c2h
2 + c3h3 + . . .
Dann hat die extrapolierte Formel D∗(h) := 2D(h/2) − D(h) die
Fehlerentwicklung
D∗(h)− D = −c22h2 + . . .
Rekursive Verbesserung:
• Berechne D∗(h) aus D(h) und D(h/2), Fehler O(h2)
• Berechne D∗(h/2) aus D(h/2) und D(h/4), Fehler O(h2)
• Berechne aus D∗(h) und D∗(h/2) analog D∗∗(h), Fehler O(h3)
10

Ableitung mit Extrapolation (5)
Algorithmus: h-Extrapolation
Sei D(h) eine Naherung von D mit der Fehlerentwicklung
D(h)− D = c1h1 + c2h
2 + c3h3 + . . .
und h > 0. Definiere
Di,0 := D
(
h
2i
)
fur i = 0,1, . . . ,
also
D0,0 := D(h), D1,0 := D
(
h
21
)
, D2,0 := D
(
h
22
)
, . . . .
Damit lasst sich die Ableitung rekursiv verbessern
11
Ableitung mit Extrapolation (6)
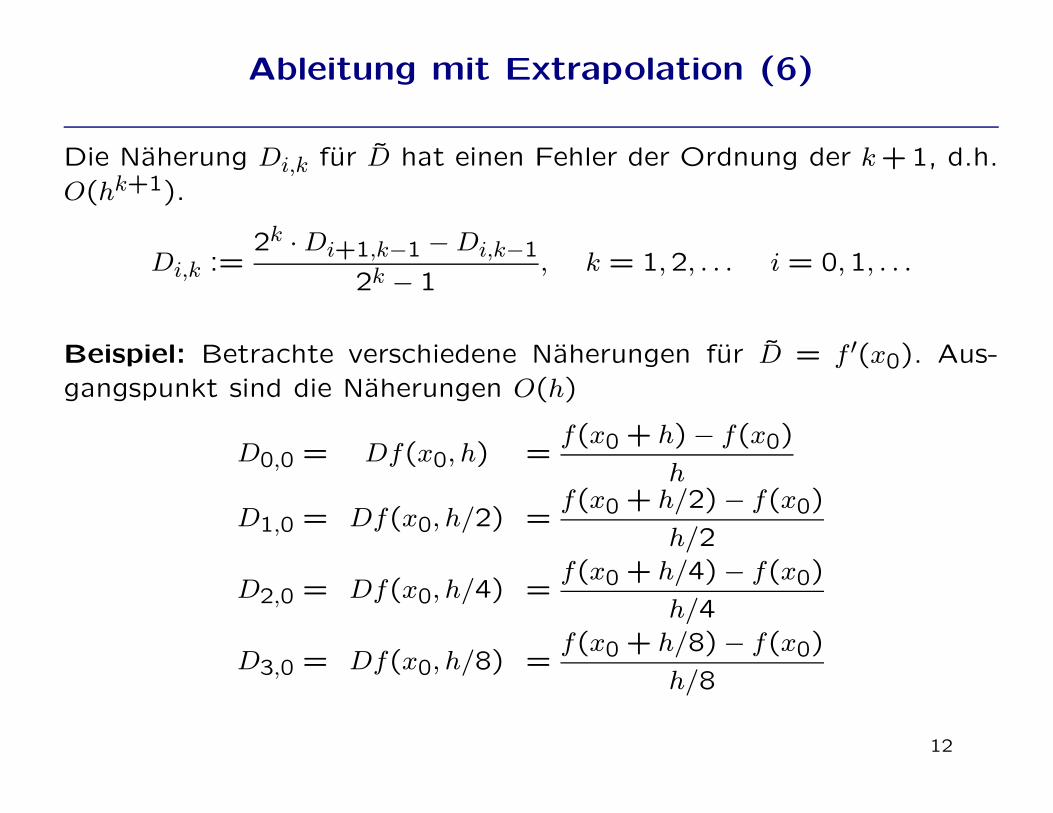
Die Naherung Di,k fur D hat einen Fehler der Ordnung der k+1, d.h.
O(hk+1).
Di,k :=2k ·Di+1,k−1 −Di,k−1
2k − 1, k = 1,2, . . . i = 0,1, . . .
Beispiel: Betrachte verschiedene Naherungen fur D = f ′(x0). Aus-
gangspunkt sind die Naherungen O(h)
D0,0 = Df(x0, h) =f(x0 + h)− f(x0)
h
D1,0 = Df(x0, h/2) =f(x0 + h/2)− f(x0)
h/2
D2,0 = Df(x0, h/4) =f(x0 + h/4)− f(x0)
h/4
D3,0 = Df(x0, h/8) =f(x0 + h/8)− f(x0)
h/8
12

Ableitung mit Extrapolation (7)
Berechne daraus die Naherungen der Ordnung O(h2) gemaß
D0,1 :=21 ·D1,0 −D0,0
21 − 1= 2 ·D1,0 −D0,0 = 2 ·Df(x0,
h
2)−Df(x0, h)
D1,1 :=21 ·D2,0 −D1,0
21 − 1= 2 ·D2,0 −D1,0
D2,1 :=21 ·D3,0 −D2,0
21 − 1= 2 ·D3,0 −D2,0
Daraus folgt fur die Naherungen der Ordnung O(h3)
D0,2 :=22 ·D1,1 −D0,1
22 − 1=
4 ·D1,1 −D0,1
3
D1,2 :=22 ·D2,1 −D1,1
22 − 1=
4 ·D2,1 −D1,1
3
13
Ableitung mit Extrapolation (8)
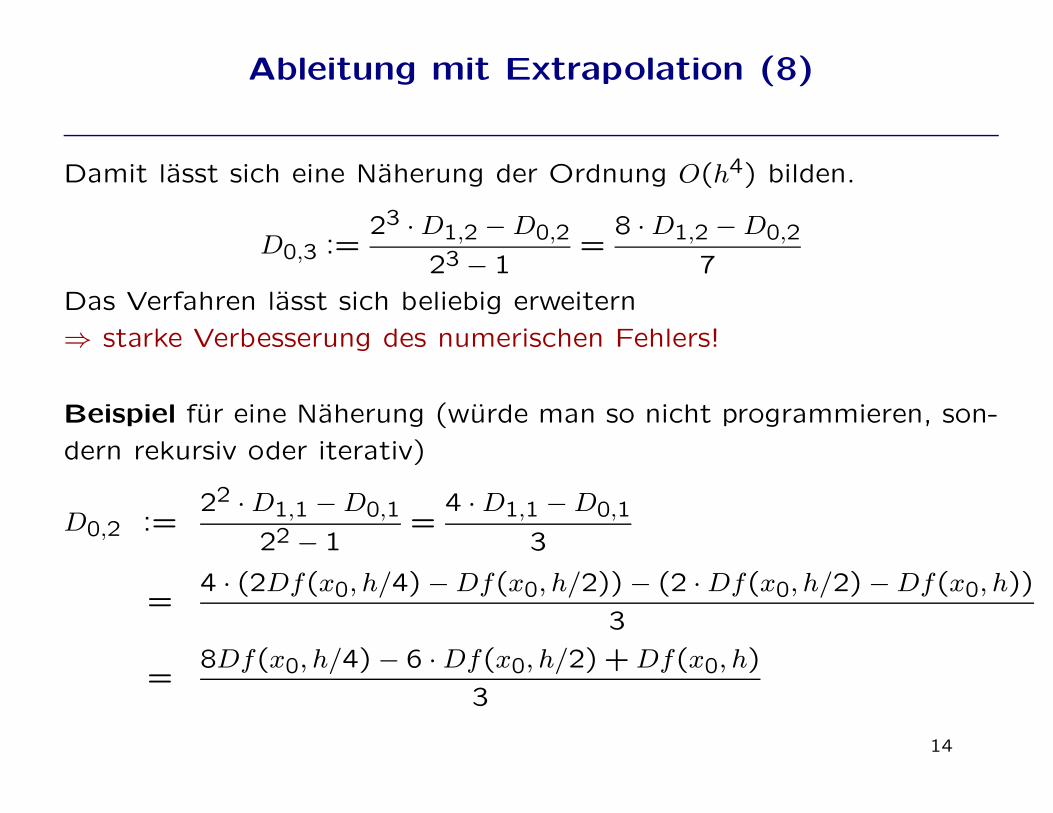
Damit lasst sich eine Naherung der Ordnung O(h4) bilden.
D0,3 :=23 ·D1,2 −D0,2
23 − 1=
8 ·D1,2 −D0,2
7
Das Verfahren lasst sich beliebig erweitern
⇒ starke Verbesserung des numerischen Fehlers!
Beispiel fur eine Naherung (wurde man so nicht programmieren, son-
dern rekursiv oder iterativ)
D0,2 :=22 ·D1,1 −D0,1
22 − 1=
4 ·D1,1 −D0,1
3
=4 · (2Df(x0, h/4)−Df(x0, h/2))− (2 ·Df(x0, h/2)−Df(x0, h))
3
=8Df(x0, h/4)− 6 ·Df(x0, h/2) +Df(x0, h)
3
14
Ableitung mit Extrapolation (9)
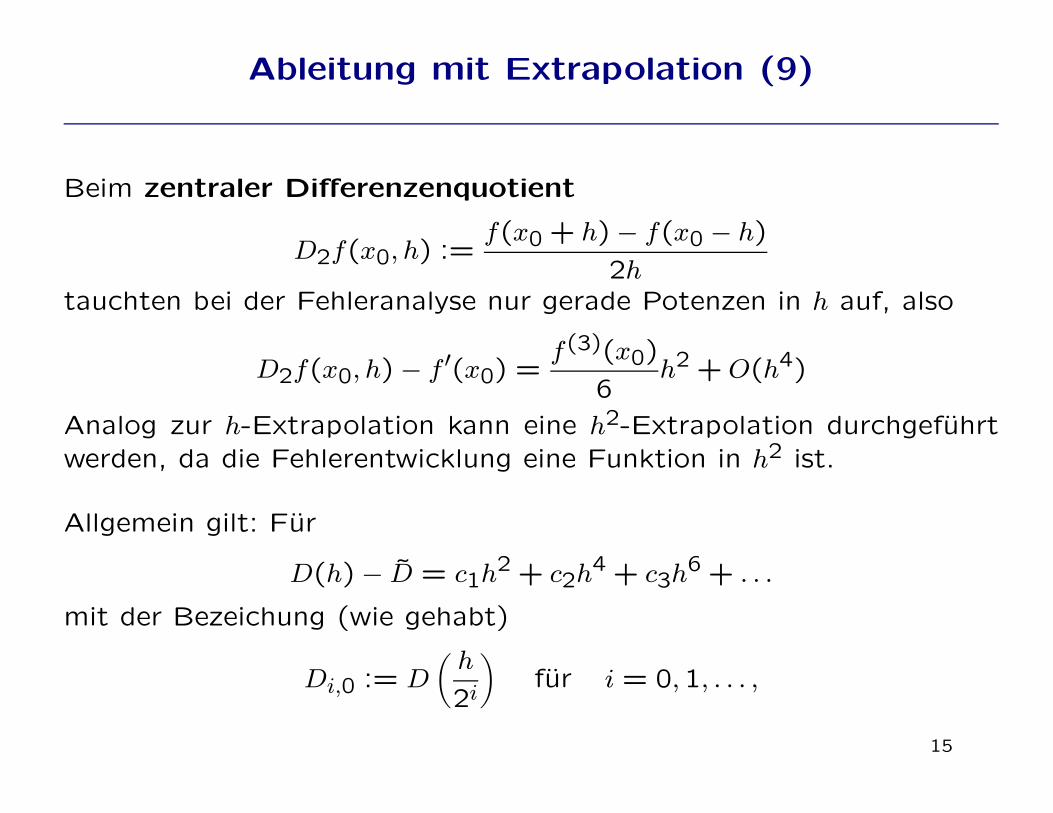
Beim zentraler Differenzenquotient
D2f(x0, h) :=f(x0 + h)− f(x0 − h)
2htauchten bei der Fehleranalyse nur gerade Potenzen in h auf, also
D2f(x0, h)− f ′(x0) =f(3)(x0)
6h2 +O(h4)
Analog zur h-Extrapolation kann eine h2-Extrapolation durchgefuhrt
werden, da die Fehlerentwicklung eine Funktion in h2 ist.
Allgemein gilt: Fur
D(h)− D = c1h2 + c2h
4 + c3h6 + . . .
mit der Bezeichung (wie gehabt)
Di,0 := D
(
h
2i
)
fur i = 0,1, . . . ,
15
Ableitung mit Extrapolation (10)
Di,k := Di+1,k−1+Di+1,k−1 −Di,k−1
4k − 1, k = 1,2, . . . n i = 0,1, . . . , n−k
Die Naherung Di,k fur D hat einen Fehler der Ordnung der 2k + 2,
d.h. O(h2k+2)
Beispiel:
• Sie Di,0 der zentrale Differenzenquotient mit h/2i, berechne D0,0,D1,0, D2,0, Fehler O(h2)
• Daraus berechne (Fehler O(h4))
D0,1 =4D1,0 −D0,0
3, D1,1 =
4D2,0 −D1,0
3
• und anschließend (Fehler O(h6))
D0,2 =16D1,0 −D0,0
15
16
Ableitung hoherer Ordnung (1)
Beispiel: 2. Ableitung
Ausgangspunkt Taylorentwicklungen fur
f(x0 +2h), f(x0 + h), f(x0), f(x0 − h), f(x0 − 2h).
• Vorwartsdifferenz
D3f(x0, h) :=f(x0 +2h)− 2f(x0 + h) + f(x0)
h2= f ′′(x0) +O(h3)
• zentrale Differenz
D3f(x0, h) :=f(x0 + h)− 2f(x0) + f(x0 − h)
h2
• Ruckwartsdifferenz
D3f(x0, h) :=f(x0)− 2f(x0 − h) + f(x0 − 2h)
h2
17

Ableitungen in der Bildbearbeitung - GRA (1)
Ein wesentliches Problem ist die Erkennung von Kanten. Kanten sind
dort, wo die 1. Ableitung einen Extremwert hat bzw. die 2. Ableitung
Null ist.
• Es muss die Ableitung in x und y-Richtung betrachtet werden
→ partielle Ableitung, ∂∂x bzw. ∂
∂y
• Der Abstand h ist ein Pixel und wird =1 gesetzt.
• Erster Ansatz: Zentraler Differenzenquotient
∂
∂xf(xi, yj, h) ∼ f(xi+1, yj)− f(xi−1, yj)
2
• Zur Verbesserung werden nicht die Pixel im Abstand “2” in x-
Richtung herangezogen, sondern die Umgebung in Diagonalenrich-
tung, also im Abstand “√2” betrachtet.
18

Ableitungen in der Bildbearbeitung - GRA (2)
• Verbesserung: Zentraler Differenzenquotient bei (xi, yj−1), (xi, yj)
und (xi, yj+1)
• Prewitt Operator
∂
∂xf(xi, yj, h) ∼ f(xi+1, yj+1)− f(xi−1, yj+1) +
f(xi+1, yj)− f(xi−1, yj) +
f(xi+1, yj−1)− f(xi−1, yj−1)
• Sobel Operator
∂
∂xf(xi, yj, h) ∼ f(xi+1, yj+1)− f(xi−1, yj+1) +
2 · (f(xi+1, yj)− f(xi−1, yj)) +
f(xi+1, yj−1)− f(xi−1, yj−1)
• Der Sobel-Operator wird in 2 Varianten z.B. in OpenCV durch die
Funktion void cvSobel(...) berechnet
19

Ableitungen in der Bildbearbeitung - GRA (3)
Bestimmung der Bedingung 2.Ableitung = 0, also in 2 Dimensionen
die Summe der 2. partiellen Ableitungen in x und y-Richtung = 0
• Laplace-Operator
∆f(xi, yj) =
(
∂2
∂x2+
∂2
∂y2
)
f(xi, yj)
• Nahere die 2. Ableitung durch eine zentrale Differenz an (h = 1):
∂2
∂x2f(xi, yj) = f(xi+1, yj)− 2f(xi, yj) + f(xi−1, yj)
• Analog in y-Richtung, die Summe ergibt
∆f(xi, yj) = f(xi+1, yj)+f(xi−1, yj)+f(xi, yj+1)+f(xi, yj−1)−4f(xi, yj)
• Der Laplace-Operator wird z.B. in OpenCV durch die Funktion
void cvLaplace(...) berechnet.
20

Numerische Integration (1)
Berechne das bestimmte Integral
I =
∫ b
af(x)dx = F(b)− F(a),
wobei F die Stammfunktion von f ist. Die numerische naherungsweise
Berechnung von I nennt man numerische Quadratur (Ersetzen der
Flache unter der Kurve durch ein Rechteck/Quadrat).
Einsatz:
• wenn es keine Stammfunktion F gibt, z.B.Gaußsche Glockenkurve
bzw. Normalverteilung
• wenn f nicht vollstandig bekannt ist, also z.B. nur einzelne Werte
wie Geschwindigkeiten vorliegen und der zuruckgelegte Weg be-
rechnet werden soll (siehe Differentialgleichungen).
21

Numerische Integration (2)
Beispiel: Normalverteilung
f(x) =1
σ√2π
exp
(
−(x− µ)2
2σ2
)
mit dem Erwartungswert µ und die Standardabweichung σ.
Frage: Mit welcher Wahrscheinlichkeit wird ein Wert x zwischen a und
b angenommen.
Antwort: Berechne die Flache unter der Glockenkurve bzw. das Inte-
gral uber der Glockenkurve.
Quadraturverfahren: Berechne f(x) an Stutzstellen xi und zugehori-
ge Gewichte ωi. Bestimme das Integral naherungsweise durch
I(f) =
∫ b
af(x) ≈
n∑
i=0
ωif(xi)
22

Numerische Integration (3)
Trapezregel:
Ersetze die Funktion zwischen den Punkten (a, f(a)) und (b, f(b))
durch eine Gerade.
I(f) =∫ b
af(x)dx =
f(a) + f(b)
2(b− a) =
b− a
2f(a) +
b− a
2f(b)
• Stutzstellen x1 = a und x2 = b
• Gewichte ω1 = ω2 = b−a2
a b
f(a)
f(b)
(f(a)+f(b))/2
23

Numerische Integration (4)
Mittelpunktsregel: (auch Rechteckregel genannt)
Ersetze die Funktion zwischen den Punkten (a, f(a)) und (b, f(b))durch eine Konstante mit dem Wert des Funktionswerts im Mittel-
punkt des Intervalls.
I(f) =∫ b
af(x)dx = (b− a) · f
(
b+ a
2
)
• Nur eine Stutzstellen
x1 = (b+ a)/2
• Gewicht ω1 = (b− a)
a b
f(a)
f(b)
(a+b)/2
f((a+b)/2)
24
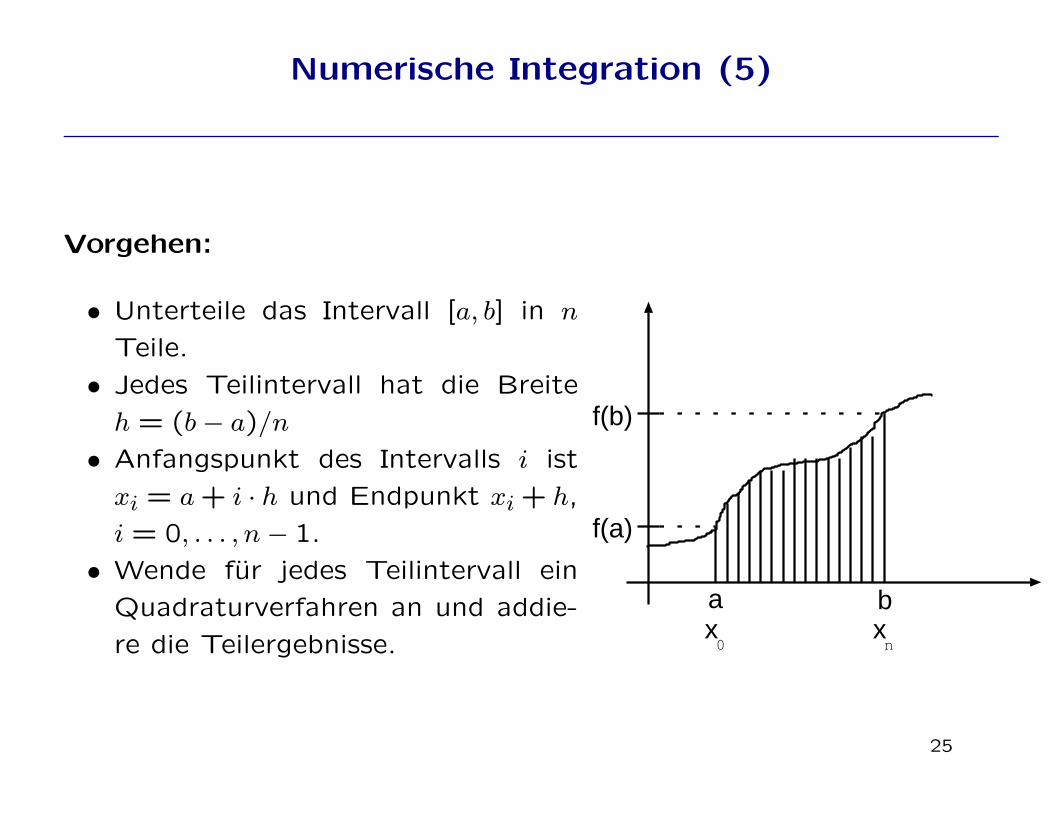
Numerische Integration (5)
Vorgehen:
• Unterteile das Intervall [a, b] in n
Teile.
• Jedes Teilintervall hat die Breite
h = (b− a)/n
• Anfangspunkt des Intervalls i ist
xi = a+ i · h und Endpunkt xi + h,
i = 0, . . . , n− 1.
• Wende fur jedes Teilintervall ein
Quadraturverfahren an und addie-
re die Teilergebnisse.
a b
f(a)
f(b)
x0
xn
25
Numerische Integration (6)
• Summierte Trapezregel
I ≈ Tf =n−1∑
i=0
(
xi+1 − xi
2f(xi) +
xi+1 − xi
2f(xi+1)
)
= h
1
2(f(a) + f(b)) +
n−1∑
i=1
f(xi)
• Summierte Mittelpunkts- oder Rechteckregel
I ≈ Rf =n−1∑
i=0
(xi+1 − xi)f
(
xi+1 + xi
2
)
= hn−1∑
i=0
f
(
xi +h
2
)
26

Numerische Integration (7)
Geht es besser? Ja. Finde eine gute interpolierende Funktion p der
Funktion f mit f(xi) = p(xi), die Sie integrieren konnen.
Fur den Fall eines interpolierenden Polynoms (Li(x): Lagrange-Polynom)
p(x) =n∑
i=0
f(xi)Li(x)
Gewichte in der Quadratur folgen aus dem Integral uber das interpo-
lierende Polynom
∫ b
af(x)dx ≈
∫ b
ap(x)dx =
n∑
i=0
f(xi)∫ b
aLi(x)dx =
n∑
i=0
f(xi)wi
Meist werden aquidistante Stutzstellen xi gewahlt.
27

Numerische Integration (8)
Polynom 1. Ordnung
p(x) = f(a) +f(b)− f(a)
b− a(x− a)
Integralauswertung:
∫ b
af(x)dx ≈
∫ b
ap(x)dx
= f(a)(b − a) +f(b)− f(a)
b− a
(x− a)2
2
∣
∣
∣
∣
∣
b
a
= f(a)(b − a) +f(b)− f(a)
b− a
(b− a)2
2− f(b)− f(a)
b− a
(a− a)2
2
= (b− a) ·(
f(a)
2+
f(b)
2
)
ergibt wieder die Trapezregel
28

Numerische Integration (9)
Polynom 2. Ordnung
Interpoliere die Funktion in einem Intervall [a, b] durch eine Parabel.
Wahle
x0 = a, , x1 =a+ b
2, x2 = b, h =
b− a
2
Bestimme die Konstanten a0, a1, a2 so, dass p(xi) = a2x2i +a1xi+a0 =
f(xi) und integriere die p(x).
Ohne Beweis:∫ b
af(x)dx ≈
∫ b
ap(x)dx =
h
6
(
f(a) + 4f
(
a+ b
2
)
+ f(b)
)
Das ist die Simpson-Regel, nach Wikipedia seit 1608 im Einsatz.
29

Numerische Integration (10)
• Zu beachten: Die Simpsonregel verwendet eine zusatzliche Stutz-
stelle in der Mitte des Intervalls.
• Ohne Beweis: Sie liefert exakte Ergebnisse fur Polynome 3. Ord-
nung
• Das allgemeine Vorgehen ist wie bei den anderen Regeln: Unter-
teile das Intervall in n Teile und wende die Simpsonregel fur jedes
Teilintervall an. Das fuhrt zur summierten Simpsonregel:
∫ b
af(x)dx ≈ Sf =
h
6
n−1∑
i=0
(
f(xi) + 4f
(
xi + xi+1
2
)
+ f(xi+1)
)
=h
6
f(a) + 4f(a+h
2) + f(b) +
n−1∑
i=1
(
2f(xi) + 4f
(
xi + xi+1
2
))
30
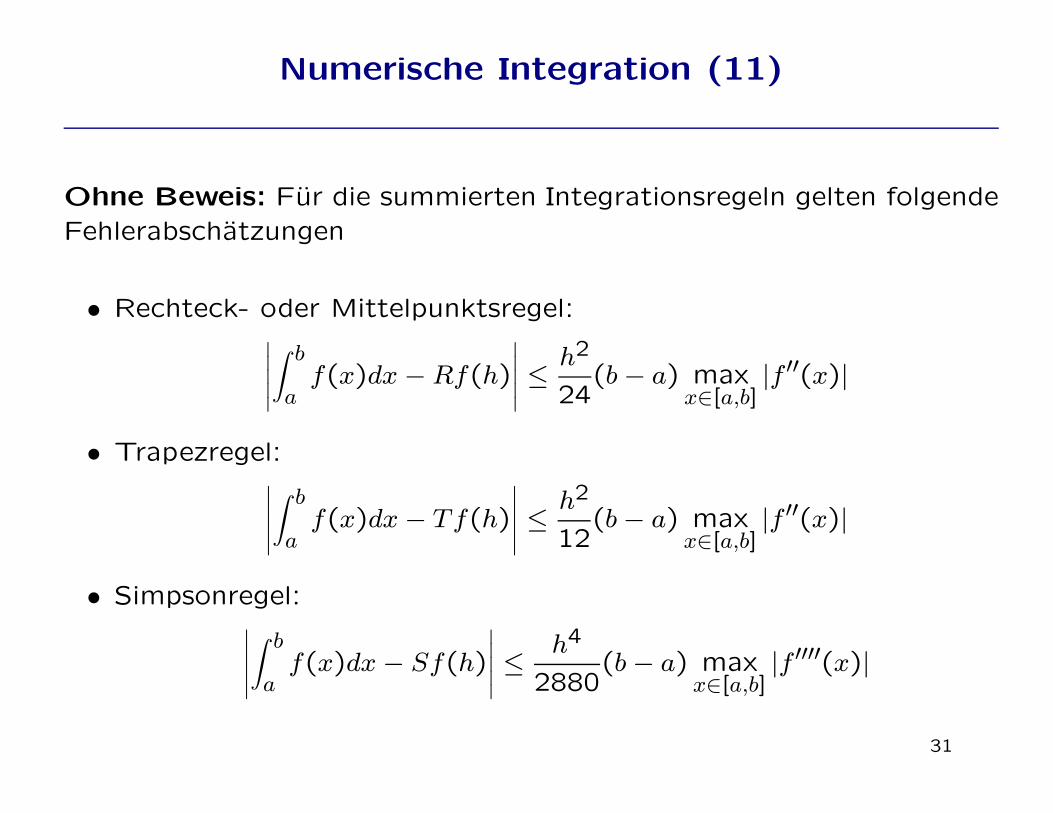
Numerische Integration (11)
Ohne Beweis: Fur die summierten Integrationsregeln gelten folgende
Fehlerabschatzungen
• Rechteck- oder Mittelpunktsregel:∣
∣
∣
∣
∣
∫ b
af(x)dx −Rf(h)
∣
∣
∣
∣
∣
≤ h2
24(b− a) max
x∈[a,b]|f ′′(x)|
• Trapezregel:∣
∣
∣
∣
∣
∫ b
af(x)dx− Tf(h)
∣
∣
∣
∣
∣
≤ h2
12(b− a) max
x∈[a,b]|f ′′(x)|
• Simpsonregel:∣
∣
∣
∣
∣
∫ b
af(x)dx− Sf(h)
∣
∣
∣
∣
∣
≤ h4
2880(b− a) max
x∈[a,b]|f ′′′′(x)|
31
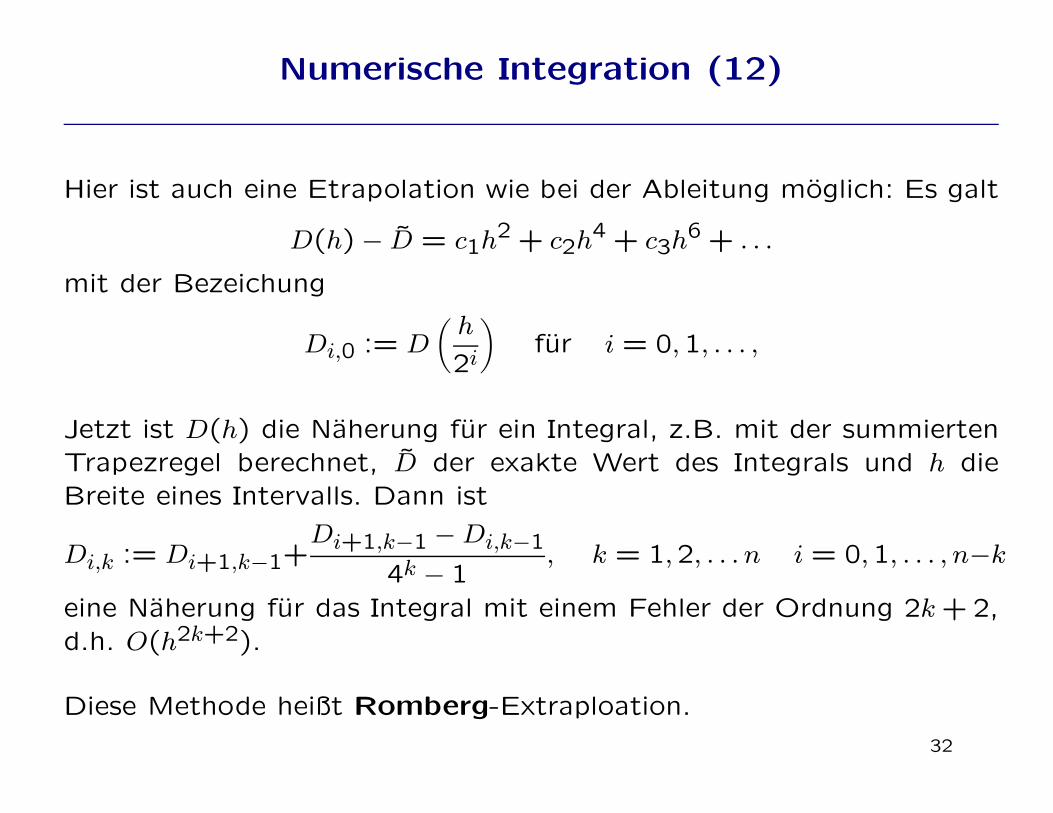
Numerische Integration (12)
Hier ist auch eine Etrapolation wie bei der Ableitung moglich: Es galt
D(h)− D = c1h2 + c2h
4 + c3h6 + . . .
mit der Bezeichung
Di,0 := D
(
h
2i
)
fur i = 0,1, . . . ,
Jetzt ist D(h) die Naherung fur ein Integral, z.B. mit der summierten
Trapezregel berechnet, D der exakte Wert des Integrals und h die
Breite eines Intervalls. Dann ist
Di,k := Di+1,k−1+Di+1,k−1 −Di,k−1
4k − 1, k = 1,2, . . . n i = 0,1, . . . , n−k
eine Naherung fur das Integral mit einem Fehler der Ordnung 2k+2,
d.h. O(h2k+2).
Diese Methode heißt Romberg-Extraploation.
32
Numerische Integration (13)
Was fehlt:
• Gauß-Quadratur: Bestmogliche Stutzstellenwahl
• Adaptive Verfahren: Je nach Fehler Stutzstellen verdichten
• Extrapolationsverfahren: Analog zur Berechnung der Ableitung das
Integral fur h, h/2, h/4, ... berechnen und die Ergebnisse fur eine
Extrapolation verwenden.
• Transformation des Integrationsintervalls: Integrationsintervall so
transformieren, dass die Funktion leichter zu integrieren ist.
• Mehrfachintegrale, z.B. Volumen unter einer Flache f(x, y)
• Monte-Carlo-Methoden: Berechnung des Integrals durch zufallig
gewahlte Punkte (siehe Statistik-Vorlesung)
33

Gewohnliche Differentialgleichungen (1)
Neben der direkten Berechnung von Ableitungen und Integralen be-
steht eine Hauptanwendung in der Losung von sogenannten gewohn-
lichen und partiellen Differentialgleichungen.
Gewohnliche Differentialgleichung: Gesucht wird eine Funktion, die
nur implizit gegeben ist durch eine Gleichung fur die Ableitung
y′(x) = φ(y(x), x)
und eine Anfangsbedingung
y(x0) = y0
Die oben beschriebenen Methoden bieten Ansatze, um solche Glei-
chungen zu losen.
34

Gewohnliche Differentialgleichungen (2)
Beispiele:
y′(x) = 6x2, y(0) = 2 Losung: y(x) = 2x3 +2
y′(x) = y(x)− 1, y(0) = 2 Losung: y(x) = ex +1
y′(x) = 6x2y(x), y(0) = 2 Losung: y(x) = 2e2x3
Im Allgemeinen ist nicht eine Gleichung, sondern ein System von Glei-chungen gegeben:
y′1(x) = f1(x, y1(x), y2(x), . . . , yn(x))...
y′n(x) = fn(x, y1(x), y2(x), . . . , yn(x))
mit den Anfangswerten
yi(x0) = y(0)i , i = 1, . . . , n
35

Gewohnliche Differentialgleichungen (3)
Hangt die gesuchte Funktion nicht von einer Varialben, sondern von
mehreren Variablen ab, so spricht man von partiellen Differential-
gleichungen. Gesucht sind die Funktion y1, . . . , yn, die hier z.B. vom
Ort und der Zeit abhangen: x1, x2, x3, t
∂y1∂t
+∂
∂x1f(1)1 (y1, ..., yn) +
∂
∂x2f(2)1 (y1, ..., yn) +
∂
∂x3f(3)1 (y1, ..., yn) = g1
· · · = · · ·∂yn
∂t+
∂
∂x1f(1)n (y1, ..., yn) +
∂
∂x2f(2)n (y1, ..., yn) +
∂
∂x3f(3)n (y1, ..., yn) = gn
Diese Gleichungen konnen fast immer nur auf einen Rechner gelost
werden, in dem die Ableitungen durch mehr oder weniger “gute” Dif-
ferenzenquotienen ersetzt werden oder aber die Gleichungen einmal
integriert werden und die Integrale durch mehr oder weniger “gute”
numerische Integrationsberechnungen ersetzt werden.
36

Gewohnliche Differentialgleichungen (4)
Anwendungsbeispiel aus der Physik: Die Erde dreht sich um die Sonne
im Schwerefeld der Sonne
d2x1dt2
= −Gmsonne
x21 + x22 + x23d2x2dt2
= −Gmsonne
x21 + x22 + x23d2x3dt2
= −Gmsonne
x21 + x22 + x23.
Wurde von Kepler ca. 1606 fur 2 Korper gelost, fur 3 Korper gibt es
keine allgemeine Losung.
Anwendungsbeispiel aus den Sozialwissenschaften: Die Bevolkerung bder Erde wachst proportional zur Anzahl der lebenden Menschen auf
der Erde mit der Zeit t
db(t)
dt= αb(t).
37

Gewohnliche Differentialgleichungen (5)
Anwendungsbeispiel aus dem Maschinenbau: Temperaturanderungen
∂T(x, t)
∂t=
∂2T
∂x21+
∂2T
∂x22+
∂2T
∂x23+
Q
a.
Anwendungsbeispiel aus dem Finanzwesen: Black - Scholes - Glei-chung zur Bewertung von Finanzderivate
dV (S, t)
dt+
1
2σ2S2∂
2V
∂S2(S, t) + (r − δ)S
∂V
∂S(S, t)− rV (S, t) = 0
• V : Wert des Finanzderivates
• S: Kurs des Basis-Wertes (z.B. ein Aktien- oder Wahrungskurs)
• σ2: Volatilitat (Standard-Abweichung)
• r: Zinsrate
• δ: Dividendenrate
Nobelpreis fur Wirtschaftswissenschaften, 1997
38

Gewohnliche Differentialgleichungen (6)
Ein einfaches numerisches Losungsbeispiel aus Knorrenschild:
y′(x) = x2 +0.1y(x), Anfangswert: y(−1,5) = 0
Ersetze die Ableitung durch einen Differenzenquotienten bzw. erste
Ordnung Taylorreihe
y(x+ h) ≈ y(x) + y′(x) · hStarte bei x0 = −1,5 und gehe Schritt fur Schritt in x weiter. Mit
y(xi) = yi und z.B. h = 0.6
y0 = 0
y1 = y0 + h(x20 +0,1y0) = 0+ 0.6 · ((−1,5)2 +0,1 · 0) = 1,35
y2 = y1 + h(x21 +0,1y1) = 1,35+ 0.6 · ((−0.9)2 +0.1 · 1,35) = 1,92
y3 = y2 + h(x22 +0,1y2) = 2,09
Alles weitere sehr gerne in Scientific Computing im Masterstudien-
gang.
39


















