01 J Pyrhonen - Synch Machn
54
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.1 7. SYNCHRONOUS MACHINE .................................................................................................... 1 7.1 Synchronous Machines Models ........................................................................................... 4 7.2 Equivalent Circuits and Machine Parameters of a Synchronous Machine ........................ 11 7.3 Measurement of Motor Parameters b y an Electrical Drive (DTC Drive) .......................... 16 7.4 Finite Element Method (FEM) for Determining the Inductances of a Synchronous Machine...................... .................................................................................................................... 20 7.5 The Relationship between the Stator Excitation and the Rotor Excitation of a Synchronous Machine................................. ..................................................................... ..............25 7.5.1 Non-Salient Pole Machine ......................................................................................... 25 7.5.2 Salient-Pole Machine ................................................................................................. 26 7.5.3 Referring Factor ......................................................................................................... 30 7.5.4 Referring (to the Stator) When Applying Space Vectors .......................................... 31 7.6 Vector Diagram of a Synchronous Machine ...................................................................... 32 7.7 Torque Production of a Synchronous Machine ................................................................. 37 7.8 Simulation of an Electrically E xcited Salient-Pole Machine by Constant Parameters ...... 38 7.9 Current Equations of a Synchronous Machine .................................................................. 40 7.10 Simulation of a Synchronous Machine in a Discrete-Time System .................................. 41 7.11 Implementation o f the Vector Control of a Synchronous Machine ................................... 42 7. SYNCHRONOUS MACHINE The subject of rotating-field machines is approached by starting from synchronous machines, as they represent the most versatile machine type and furthermore, they share basically all the charac- teristics of asynchronous machines. For instance the equivalent circuits determined for synchronous machines are only simplified when we change over to the analysis of asynchronous machines. Nowadays, there are several types of synchronous machines on t he market, and their role as drive motors in industrial applications is constantly increasing. New applications are emerging both for permanent magnet synchronous machines and synchrono us reluctance (SR) machines. A poly-phase synchronous machine is a rotating-field machine, in which the rotor, that is, the pole wheel, rotates synchronously with the rotating magnetic field generated by the armature winding of the machine when the machine is in a steady state. The stator of the synchronous machine is com- posed of a laminated stack comprised of electric sheets and mounted to a s teel frame. I n the stator stack, there are slots for the stator winding, which is usually a three-phase construction. The rotor of the machine can be implemented in various ways: either as a cylindrical non-salient pole rotor, as a salient pole rotor with separate magnetic poles on the rotor axis, as a reluctance rotor, or as a per- manent magnet rotor with magnetic poles generated by permanent magnets. The rotors can be im- plemented either as laminated constructions or a s solid ones. I n the non-salient pole machines and salient pole machines, the field current (rotor excitation) is conducted to the rotor either through slip rings or brushes, or there is a separate excitation generator mounted on the shaft of the machine to produce the field current. The latter case represents the so-called brushless synchronous machine. In the permanent magnet machine, excitation is based on permanent magnets, and therefore excita- tion cannot be controlled similarly as in the two other cases. The final excitation state is determined by the magnitude of the supply voltage; the flux of the machine can be influenced by armature reac- tion, that is, by magnetizing the machine with stator current. In the non-salient pole machine, there are slots in the rotor for the field winding, similarly as there are slots in the stator for the stator winding. The field winding of the salient-pole machine is wound around the iron core of the magnetic poles. This assembly is mounted on the rotor shaft. On the outer surface of the magnetic poles, there may be a damper winding, constructed as a cage winding. It comprises bars on the surface of the pole shoe, the bars being connected together at both ends by short-circuit rings.
Transcript of 01 J Pyrhonen - Synch Machn

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 1/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.1
7. SYNCHRONOUS MACHINE .................................................................................................... 1
7.1 Synchronous Machines Models ........................................................................................... 4
7.2 Equivalent Circuits and Machine Parameters of a Synchronous Machine ........................ 11
7.3 Measurement of Motor Parameters by an Electrical Drive (DTC Drive) .......................... 16
7.4 Finite Element Method (FEM) for Determining the Inductances of a Synchronous
Machine.......................................................................................................................................... 20
7.5 The Relationship between the Stator Excitation and the Rotor Excitation of aSynchronous Machine .................................................................................................................... 25
7.5.1 Non-Salient Pole Machine ......................................................................................... 25
7.5.2 Salient-Pole Machine ................................................................................................. 26
7.5.3 Referring Factor ......................................................................................................... 30
7.5.4 Referring (to the Stator) When Applying Space Vectors .......................................... 31
7.6 Vector Diagram of a Synchronous Machine ...................................................................... 32
7.7 Torque Production of a Synchronous Machine ................................................................. 37
7.8 Simulation of an Electrically Excited Salient-Pole Machine by Constant Parameters ...... 38
7.9 Current Equations of a Synchronous Machine .................................................................. 40
7.10 Simulation of a Synchronous Machine in a Discrete-Time System .................................. 41
7.11 Implementation of the Vector Control of a Synchronous Machine ................................... 42
7. SYNCHRONOUS MACHINE
The subject of rotating-field machines is approached by starting from synchronous machines, as
they represent the most versatile machine type and furthermore, they share basically all the charac-
teristics of asynchronous machines. For instance the equivalent circuits determined for synchronous
machines are only simplified when we change over to the analysis of asynchronous machines.
Nowadays, there are several types of synchronous machines on the market, and their role as drive
motors in industrial applications is constantly increasing. New applications are emerging both for
permanent magnet synchronous machines and synchronous reluctance (SR) machines.
A poly-phase synchronous machine is a rotating-field machine, in which the rotor, that is, the pole
wheel, rotates synchronously with the rotating magnetic field generated by the armature winding of
the machine when the machine is in a steady state. The stator of the synchronous machine is com-
posed of a laminated stack comprised of electric sheets and mounted to a steel frame. In the stator
stack, there are slots for the stator winding, which is usually a three-phase construction. The rotor of
the machine can be implemented in various ways: either as a cylindrical non-salient pole rotor, as a
salient pole rotor with separate magnetic poles on the rotor axis, as a reluctance rotor, or as a per-
manent magnet rotor with magnetic poles generated by permanent magnets. The rotors can be im-
plemented either as laminated constructions or as solid ones. In the non-salient pole machines and
salient pole machines, the field current (rotor excitation) is conducted to the rotor either throughslip rings or brushes, or there is a separate excitation generator mounted on the shaft of the machine
to produce the field current. The latter case represents the so-called brushless synchronous machine.
In the permanent magnet machine, excitation is based on permanent magnets, and therefore excita-
tion cannot be controlled similarly as in the two other cases. The final excitation state is determined
by the magnitude of the supply voltage; the flux of the machine can be influenced by armature reac-
tion, that is, by magnetizing the machine with stator current.
In the non-salient pole machine, there are slots in the rotor for the field winding, similarly as there
are slots in the stator for the stator winding. The field winding of the salient-pole machine is wound
around the iron core of the magnetic poles. This assembly is mounted on the rotor shaft. On the
outer surface of the magnetic poles, there may be a damper winding, constructed as a cage winding.
It comprises bars on the surface of the pole shoe, the bars being connected together at both ends by
short-circuit rings.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 2/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.2
Damper windings are used in synchronous machines to improve the stability of he drive. Direct-on-
line machines in particular should be equipped with damping, however, damper windings are useful
also in controlled synchronous machine drives. In speed-controlled drives, it is possible to reach
stability also without damping. Due to the effect of the damper windings, the flux linkage of the
machine changes more slowly, whereas on the other hand, the stator current changes faster than in a
machine without damper windings. Since the stator current can be adjusted in a short time, also thetorque of the machine can be altered rapidly, and thus the dynamics of the machine is improved
with damping.
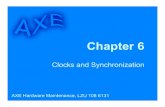
The structure and vector diagram of a salient pole machine is illustrated in Figure 7.1.
Figure 7.1 Salient pole synchronous machine and its vector
diagram. Stator voltage us, stator current is, field current iF,sum current isum, stator flux linkage s, air gap flux linkage
m. It is typical of a salient pole machine that the directions
of the vector sum of currents and the air gap flux linkage
deviate from each other in such a way that the flux turns
towards the d-axis.
s
m
Lsis
is
us
iF
s
isum
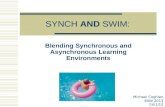
Synchronous machines constitute a significant family of electrical machines among AC machines.
Different machine types can be categorized for instance according to the schematic diagram illus-
trated in Figure 7.1.SYNCHRONOUS MACHINES
SEPARATELY
MAGNETIZED
SYNCHRONOUSMACHINES SM
SYNCHRONOUSRELUCTANCE
MACHINESSyRM
PERMANENT
MAGNET SYNCHR.
MACHINES PMSM
SyRM Ld/ Lq
> 10
SyRM, permanentmagnets
Ld/ Lq
> 10
PMSM,
withsaliency
PMSM,
non-salient
Lq/ Ld
> 1 Ld/ Lq = 1
PMSMembeddedmagnets
PMSM
pole shoes
Salient pole m.
Ld/ Lq
> 1
Non-salient pole m. Ld/ Lq = 1
Brushless:-ext. pole SM
(+PM-gen)
-axial
transformer
-radial
transformer
-rotating fieldmagnetizing
With brushes-rotating
magnetizingmachine-thyristor bridge
With brushes-rotatingmagnetizing
machine
-thyristor bridge
Brushless:
-ext. pole SM(+PM-gen)
-axialtransformer
-radial
transformer
-rotating field
magnetizing
Figure 7.1 Synchronous machine family
Slow drives are often salient-pole configurations, and thus the machine is magnetically asymmetric.A Finnish tradition has been to construct salient pole machines both for motor and generator use.
The cooling of a salient pole machine is easier to manage than the cooling of a non-salient pole ma-

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 3/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.3
chine, since there is plenty of room for the circulation of the cooling air. The implementation of a
salient pole construction is also technically reasonable. The salient-pole configuration leads to
magnetic asymmetry, and consequently, to considerable problems in modelling the machine. The
problems in modelling are one reason why for instance Siemens manufactures non-salient pole ma-
chines also for slow drives. Therefore, the purpose of use is no longer a relevant basis to categorize
the machines into salient pole and non-salient pole ones. However, high-speed synchronous ma-
chines are typically non-salient pole configurations, generally implemented with solid rotors. If such a rotor does not include a separate damper winding, problems arise in modelling again, when
we try to model the damping effects of the eddy currents in the solid rotor frame.
In steam power plants, the machine powers may reach up to 1500 MW. The rotation speed of such
machines is often 3000 or 1500 min-1, and the machines are typically non-salient pole constructions.
In that case, a solid rotor is employed, which, even as a long and slim construction, is able to with-
stand a high rotation speed without the critical speeds being exceeded. Excitation is often imple-
mented by a brushless solution. However, when aiming at good dynamics, constructions with
brushes are selected (e.g. the Loviisa nuclear power plant).
Hydropower machines are typically salient-pole constructions. The world’s largest hydropower sta-
tion is located in Itaipu, upon the Paraná River on the border between Brazil and Paraguay. The to-
tal capacity is 14000 MW divided between 20 generating units of 700,000 kW each. There are 715
MW Francis turbines in the power plant, the water intake of one single turbine being 700 m³/s. The
height of the dam reaches 196 m. The weighted efficiency of such a large turbine is 93.8 %. The
generator efficiency of the salient-pole machines is 98.6 %. The rotor diameter is 16 m and the ro-
tating mass is 2650 t. There are 66 poles in the 50 Hz type generators, and the rated output is 823.6
MVA (90.9 min-1); the power factor is 0.85. The corresponding technical data of 60 Hz type genera-
tors are: 78 poles, 737 MVA (92.3 min-1) 0.95. The output voltage of the machines is 18 kV.
The powers of diesel generators range from a few megawatts to a few dozen megawatts. The ma-chines manufactured by ABB are salient-pole machines with 4 ... 8 ... 12 poles (the maximum speed
of a large machine being for instance 750 min-1, 8 poles, 50 Hz).
Synchronous machines may be either direct-on-line machines or converter-fed ones. Slow-speed
machines are often salient-pole constructions; however, Siemens manufactures non-salient pole ma-
chines for instance for rolling mill drives. The applications vary from wood grinders to pumps and
blowers. High-speed machines are typically non-salient pole machines; for example natural gas is
pumped from Norway into the European markets by high-speed LCI-fed ca. 40 MW, 4000 min-1
non-salient pole synchronous machines. The largest power electronics-fed synchronous motor drive
is probably the 101 MW LCI drive for a wind tunnel installation of NASA, supplied by ABB.
Considering the motor characteristics, the damper winding is of central importance. Direct-on-line
operation is impossible without a damper winding: a torque disturbance would make an undamped
machine to oscillate like a spring in the grid. However, in many vector controlled converter drives a
damper winding is not required, since the state of the machine can be controlled adequately also
without damping. Nevertheless, the machine’s ability to respond to fast torque steps is improved by
a damper winding.
If the damper winding has to be dimensioned to have a very high resistivity due to the direct-on-line
starting, the machine’s properties in synchronous operation may be impaired correspondingly.
Therefore, a synchronous motor is often started up with an auxiliary drive.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 4/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.4
As shown in Figure 7.1, there is a wide selection of synchronous machines; however, the same fun-
damental theory holds for them all, and therefore, only the most versatile example of synchronous
machines, that is, the salient pole machine, is addressed in this material. The equations presented
for salient pole synchronous machines hold for other machine types as well. When analyzing differ-
ent machine types, appropriate terms can be omitted from the equations to achieve the machine-
specific results. In the case of a permanent magnet synchronous machine, the field current of the
rotor can, if desired, be expressed as a virtual field current source.
7.1 Synchronous Machines Models
Nowadays, a two-axis model is employed for the synchronous machine; this model can be derived
by applying space vector theory. First, we start with the frames of reference required for the analy-
sis of the model, Figure 7.2. In the figure, the windings are illustrated as concentrated, in other
words, the real winding has been replaced by a bar-shaped equivalent winding depicted on the
magnetic axis of the real winding. The magnetic axes of the stator phase windings a, b, and c are
fixed to the respective phase windings. The stator reference frame is fixed in the direction of the
phase winding a and in the direction perpendicular to the phase winding. The axes of this two-phase
stator reference frame are denoted x and y. The rotor reference frame is fixed aligned with the
magnetic pole of the rotor, and in the direction perpendicular to the magnetic pole. The axes of this
two-phase stator reference frame are denoted d and q. The rotation angle between the rotor and sta-
tor reference frame is equal to the rotor electric angle r .
qd
x
y
a
c
b
r
Figure 7.2 Frames of reference related to a synchronous machine: a, b, and c indicate the directions of the magnetic
axes of the phase windings of a three-phase stator. The xy reference frame is a two-phase reference frame, the axes of
which are fixed in the direction of the stator phase winding a and perpendicular to it. The dq reference frame is a two-
phase reference frame fixed on the rotor, the axes being in the direction of the magnetic pole and perpendicular to it.
The angle between the xy and dq frames of reference is equal to the rotor position angle r .
The core idea of the current vector is that the winding current is determined as a vector parallel to
the magnetization axis of the winding. Figure 7.3 depicts the positive directions of the magnetiza-
tion axes and the current vectors of different windings. In a three-phase machine, there are angles of
120 electric degrees between the magnetic axes. The current vector is constructed by geometrically
summing up the phasors of different phases, as shown in the previous chapter. The selected positivecurrent and voltage directions are valid for motor operation.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 5/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.5
a-phase
b-phase
c-phase
120°
120°
positive and negative direction
of the magnetic axis of the
winding
120°
isb
isa
usb
usausc
isc
Figure 7.3 The directions of the magnetic axes of different phase windings of an AC machine, when the windings are
illustrated as concentrated, as well as the directions of the current vectors of different phase windings determined on the
basis of these aforementioned directions. isa, isb, and isc are the stator currents and usa, usb, and usc are the stator voltages.
In a three-phase machine, there are angles of 120 electric degrees between the magnetic axes of different phases.
Now we are ready the introduce also the flux linkage reference frame fixed to the air gap flux link-
age vector; Figure 7.4. The axes of the reference frame are the flux linkage axis and the torque
axis T.
q
d
m
r
T
x
y
m
m
Figure 7.4 The dq reference frame fixed to the rotor, the T reference frame fixed to the air gap flux linkage, and the
xy reference frame fixed to the stator. The angle between the dq and T reference frames is the pole angle m of the air
gap flux linkage. The angle between the dq and ab reference frames is the rotor position angle r . The angle m between
the T and xy reference frames is the position angle of the air gap flux linkage vector in the xy reference frame.
In the case of a synchronous machine, it is extremely important to operate in a reference frame
fixed to the rotor. This is illustrated by Figure 7.5, which shows the behaviour of the measuredmagnetizing inductance depending on the rotor position. If we stick to a fixed stator reference
frame, the magnetizing inductance will vary, which in turn complicates the determination of the

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 6/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.6
equations considerably. The term d Lm/dt has to be taken into account in the voltage equation of the
stator.
Lm
Lmd
Lmq
rotor position with respect to stator
d q
Figure 7.5 The behaviour of the magnetizing inductance as a function of the rotor position. If the inductance is meas-
ured at the direct axis, a direct magnetizing inductance Lmd is obtained, and respectively at the quadrature axis, the
quadrature magnetizing inductance Lmq.
We avoid the modelling of the inductance variation as a function of rotor position when we change
over to the rotor reference frame. Equation (7.1) is represented in a stationary reference frame fixedto the stator. When computing the operation of the synchronous machine, it is advisable to select a
reference frame in which the equations can be expressed as simplified as possible. When transform-
ing a vector initially represented in the stator reference frame into the dq reference frame that ro-
tates fixed to the rotor, or into the T flux linkage reference frame fixed to the air gap flux linkage
vector, the vector has in both cases to be turned by the position angle of the rotating reference
frame. Figure 7.6 depicts the varying vector components when performing coordinate transforma-
tion. The reference frames employed here are the rectangular xy reference frame fixed to the stator,
shortly the stator reference frame, and the rectangular dq reference frame fixed to the rotor, that is,
the rotor reference frame.
q
d
x
y
r
isisy
isx
isd
isq
Figure 7.6 The components of the current vector in different reference frames. The xy reference frame is a stationary
reference frame fixed to the stator, i.e., the stator reference frame. The dq reference frame, i.e., the rotor reference
frame is fixed to the rotor; the d-axis of the reference frame is aligned with the magnetic pole of the rotor. is is the stator
current vector, isx and isy are its components in the stator reference frame, and isd and isq are the components in the rotor
reference frame. r is the rotor position angle, 1 are 2 the angles of the stator current vector in the stator and rotor
reference frames.
The voltage equation of the stator of the machine in its own frame of reference is recapitulated here

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 7/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.7
u is
s
s s
s s
sd
d R
t
. (7.1)
The stator current vector
is
s je 1 i , (7.2)
where i is the magnitude of the vector, that is, its length, and α1 is its angle in the stator reference
frame. Since the rotor of a synchronous machine is both magnetically and electrically asymmetric,
it is advisable to represent the equations in the rotor reference frame. First, the stator current is
transferred to the rotor reference frame
is
r j je e2 1 r
i i . (7.3)
Here 2 is the vector angle in the rotor reference frame and r is the rotor position angle in the stator
reference frame. The superscript r refers to the rotor reference frame.
i is
r
s
s je r , (7.4)
i is
s
s
r je r . (7.5)
To transform Eq. (7.1) into the rotor reference frame, we have thus to make the substitutions
i i u us
s
s
r j
s
s
s
r j= e , = er r and s
s
s
r je r . Consequently, we obtain
u is
r j
s s
r j s
r j
e ed( e
dr r
r
Rt
), (7.6)
r r r r jr
sr j
r
s jr
ss
jr
s ed
d je
d
dee
t t R iu . (7.7)
Finally, both sides are divided by the term e j r , which yields
u is
r
s s
r s
r
r
s
r d
d j
d
d R
t t
. (7.8)
Now we may conclude that the first derivative term is the voltage generated by the change in the
magnitude of the flux linkage, in other words, the induction voltage, and the latter is the rotatingvoltage caused by rotation.
The vector model according to Eq. (7.8) is a complex single-axis model, and therefore it is not ca-
pable of easily taking into account the magnetic asymmetry of the salient-pole machine. Therefore,
it is advisable to divide the quantities into two components on the magnetic axes of the machine;
this model is known as the two-axis model. The model is represented in the rotor reference frame,
since the inductance parameters of the flux linkage equations are there not dependent on the rotor
position angle. The same result is obtained also by investigating the structure of the machine. Fig-
ures 7.7−7.9 illustrate different cases, in which all the windings are concentrated. In other words, an
equivalent winding is depicted on the magnetic axis, the effect of which is the same as the effect of
the real winding, since the magnetic axes of the windings are now clearly detectable.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 8/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.8
Initially, there is an ordinary three-phase winding in the stator, Figure 7.7. The direction of the
magnetic pole of the rotor, or the direct direction, is called the d-axis. The direction perpendicular
to the d-axis is known as the quadrature direction, or the q-axis. The field winding magnetizes the
magnetic circuit in the direction of the d-axis. The damper winding is illustrated by the two short-
circuited equivalent windings, one of which magnetizes the machine together with the field winding
in the d-direction, and the other in the q-direction. The equivalent damper windings are denoted D-
and Q-damper windings. The angle r between the d-axis of the rotor and the direction of the a- phase winding is the rotor angle with respect to the stator.
Figure 7.7 Representation of the synchronous ma-
chine, in which the three-phase stator winding is
illustrated by three concentrated phase windings. In
the rotor, there is a field winding and two equivalent
damper windings. isa, isb, and isc are the stator cur-
rents, and usa, usb, and usc are the stator voltages. iD and iQ are the damper winding currents. iF and uF are
the field current and voltage. r is the rotor position
angle. The abc axes and the xy reference frames are
fixed to the stator, and the dq reference frame is
fixed to the rotor.
iQ
iD r
qd
x
y
isb
a
c
b
usb
usa
usc
isa
isc
iF
uF
The rotating magnetic field generated by the three-phase stator winding can also be created by a
two-phase winding, in which the magnetic axes of the windings are perpendicular to each other, asshown in Figure 7.8. The windings of the three-phase winding and the coordinate axes in the direc-
tions of their magnetic axes are denoted a, b, and c. In the two-phase case, the symbols x and y are
employed.
Figure 7.8 The representation of the synchronous
machine, in which the three-phase winding of the
stator is replaced by a two-phase stationary winding.
In the rotor, there are a field winding and two
equivalent damper windings. isx are isy the stator cur-
rents and usx and usy are the stator voltages. iD and iQ
are the damper winding currents. iF and uF are the
field current and voltage. r is the rotor position an-
gle.
qd
x
y
usx
usy
isx
isy
uF
r iQ
iD
When the rotor rotates, the magnetic connection between the stator and rotor windings changes,
which means in practice that the inductance coefficients in the flux linkage equations depend on the

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 9/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.9
rotor angle r . To eliminate this dependence on the rotor angle, the two-phase winding fixed to the
stator is replaced by an fictitious winding rotating with the rotor, as shown in Figure 7.9. The d-
direction of this winding is congruent with the d-axis of the rotor, and the direction of the q-winding
is perpendicular to this direction, that is, aligned with the q-axis. There is another advantage with
the dq reference frame rotating along with the rotor: as the rotor rotates at the same speed with the
magnetic field in the steady state, the vectors remain stationary in the dq reference frame, whereas
in the xy reference frame, the vectors rotate at the synchronous speed.
iF
iQ
uF
iD
r
isd
usd
qd
x
y
usqisq
Figure 7.9 Representation of the synchronous machine, in which the three-phase winding has been replaced by a two-
phase rotating winding. In the rotor, there are a field winding and two equivalent damper windings. isd and isq are the
stator currents and usd and usq are the stator voltages. iD and iQ are the damper winding currents. iF and uF are the fieldcurrent and voltage. r is the rotor position angle.
The following symbols are employed for the resistances and inductances represented in the rotor
reference frame and referred to the stator:
- Ld direct synchronous inductance
- Lq quadrature synchronous inductance
- Lmd direct magnetizing inductance
- Lmq quadrature magnetizing inductance
- Ls stator leakage inductance
- LF total inductance of the field winding
- LF leakage inductance of the field winding
- LdF mutual inductance between the stator equivalent
winding on the d-axis and the field winding (in practice Lmd)
- LdD mutual inductance between the stator equivalent
winding on the d-axis and the direct equivalent damper winding
- LqQ mutual inductance between the stator equivalent
winding on the q-axis and the quadrature equivalent
damper winding (in practice Lmq)
- LD total inductance of the direct damper winding
- LD leakage inductance of the direct damper winding- LQ total inductance of the quadrature damper winding
- LQ leakage inductance of the quadrature damper winding

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 10/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.10
- Rs stator resistance
- RF resistance of the field winding
- RD resistance of the direct damper winding
- RQ resistance of the quadrature damper winding
Sometimes, the somewhat artificial Canay inductance is employed; this inductance may obtain even
negative values. It has thus to be interpreted as a corrective factor in the model, which can in manycases be omitted altogether.
- Lk mutual leakage inductance between the field winding and
the direct damper winding, i.e., the Canay inductance
Next, the same situation is approached by using the vector model. We obtained previously for the
voltage equation of the synchronous machine in the rotor reference frame
u is
r
s s
r s
r
r
s
r d
d
jd
d
R
t t
. (7.9)
The current, voltage, and flux linkage vectors are decomposed into their real and imaginary parts on
the d- and q-axes of the rotor reference frame. We obtain
us
r
d q s
r
d q s
r
d q j j j u u i i i; ; ; (7.10)
The equations for the real and imaginary parts of the voltage equation
u R i
t d s d
d
q
d
d
, (7.11)
u R it q s q
q
d
d
d . (7.12)
The voltage equations of the rotor circuits referred to the stator become
u R it F F F
Fd
d , (7.13)
0 R it D D
Dd
d, (7.14)
0 R it Q Q
Qdd
. (7.15)
The inductances of the synchronous machine model are determined in the rotor reference frame:
Ld = Lmd + Ls , (7.16)
Lq = Lmq + Ls , (7.17)
LF = Lmd + LF + Lk , (7.18)
LD = Lmd + Lk + LD , (7.19)
LQ = Lmq + LQ . (7.20)
In the literature, the following equations are given for stator flux linkages and other flux linkages;
the equations are written by using the inductances and currents referred to the stator.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 11/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.11
d d d dF F dD D L i L i L i , (7.21)
q q q qQ Q L i L i , (7.22)
F dF d F F FD D L i L i L i , (7.23)
D dD d FD F D D L i L i L i , (7.24)
Q qQ q Q Q L i L i . (7.25)
In the traditional two-axis model, it is assumed that the stator circuit (i.e., the armature circuit), the
damper windings, and the field winding are magnetically interconnected only through the magnetiz-
ing inductances Lmd and Lmq. However, the measurements have shown that in the transients, the al-
ternating component of the field current may be triple to the calculated value. Therefore, the pa-
rameter Lk known as the Canay inductance is added to the model, since the traditional two-axis
model describes only the armature circuit correctly. The Canay inductance takes into account the
deviation of the magnetic connection of the damper winding and the field winding from the direct
magnetizing inductance. Thus we obtain for the different mutual inductances:
LdD = LdF = Lmd , (7.26)
LFD = Lmd + Lk , (7.27)
LqQ = Lmq . (7.28)
Based on the above assumptions, the equations of the flux linkages can be expressed in the rotor
reference frame in the following form:
The stator flux linkage:
d md d F D s d L i i i L i( ) , (7.29)
q mq q Q s q L i i L i( ) . (7.30)
The field winding flux linkage:
F md d F F md k D L i L i L L i( ) . (7.31)
Damper flux linkages:
D md d md k F D D L i L L i L i( ) . (7.32)
Q mq q Q Q L i L i . (7.33)
7.2 Equivalent Circuits and Machine Parameters of a Synchronous Machine
The equivalent circuits of Figures 7.10−7.11 can be represented for a synchronous machine in the
rotor reference frame, since there the inductance coefficients of the flux linkage equations no longer
depend on the rotor position, and thus, the coefficients are constants. The equivalent circuits are
given separately for the d- and q-directions, since the salient pole machine is magnetically asym-
metric. Although the non-salient pole machine is in principle magnetically symmetric, it also in-
volves asymmetry to such degree that it is advisable to employ the two-axis model. Furthermore,
the field winding is usually a single-phase construction, which also justifies the application of thetwo-axis model. Only a slip-ring asynchronous machine, which can also be used as a synchronous

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 12/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.12
machine by supplying direct current to the rotor, is in principle magnetically completely symmetric,
and thus does not necessarily require a two-axis model fixed to the rotor.
ud
id
Rs
q
d
Ls
Lmd
uF
iFiD
RD RF
id
+iD
+iF
LDLF
md
Lk
Figure 7.10 The equivalent circuit of the synchronous machine in the d-direction. id and ud are the direct components of
the stator current and voltage. q and q are the direct and quadrature components of the stator flux linkage. iD is the
current of the direct damper winding. iF is the field current. Rs is the stator resistance, RD is the resistance of the direct
damper winding and RF is the resistance of the field winding. Ls is the leakage inductance of the stator, Lmd is the direct
magnetizing inductance, Lk is the Canay inductance, LD is the leakage inductance of the direct damper winding and
LF is the leakage inductance of the field winding. uF is the voltage of the field winding.
uq
iqRs
d
q
Ls
Lmq
iQ
RQ
iq+iQ
LQ mq
Figure 7.11 The equivalent circuit of the synchronous machine in the q-direction. iq and uq are the quadrature compo-
nents of the stator current and voltage. q and q are the direct and quadrature components of the stator flux linkage. iQ
is the quadrature current of the damper winding. Rs is the stator resistance, RQ is the resistance of the quadrature damper
winding. Ls is the leakage inductance of the stator, Lmq is the quadrature magnetizing inductance, LQ is the leakage
inductance of the quadrature damper winding.
Usually the parameters of the synchronous machine are obtained from the manufacturer as well as
by measurements carried out by the user of the machine. The parameters given for the machine are
not very applicable to the construction of the equivalent circuits, since the parameters defined by
traditional methods represent different magnetic states of the machine. For instance, the direct syn-chronous inductance is determined in no-load operation; the transient and subtransient inductances,
on the other hand, are defined by short-circuit tests, whereas the quadrature synchronous inductance
and the quadrature transient inductances are determined by various methods in different loading
situations. As a result, the parameters determined for the machine are not simultaneously valid, but
they all represent different magnetic states of the machine. In their design software, the manufactur-
ers apply experimentally defined coefficients of their own. The frequency converter technology
provides some solutions for determining the machine parameters. The parameters can be updated
on-line, or they can be determined in the initial identification run of the drive.
Let us next consider the traditional parameters and time constants of synchronous machines as well
as their determination. The machine parameters of Figure 7.12 are based on the results of three-
phase short-circuit tests. It is usually assumed that the mutual inductances between the windings on
the direct axis of the machine are equal, and of the magnitude of the direct magnetizing inductance

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 13/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.13
LdF = LdD = LFD = Lmd. The figure clearly illustrates the parameters traditionally given by the manu-
facturer:
The direct synchronous inductance is the sum of the stator leakage inductance and the direct
magnetizing inductance
L L Ld md s (7.34)
Correspondingly, we may write for the quadrature synchronous inductance
L L Lq mq s (7.35)
The direct transient inductance is the sum of the stator leakage inductance and the parallel con-
nection of the direct magnetizing inductance and the field winding leakage inductance
L L L L
L Ld s
md F
md F
'
(7.36)
The direct subtransient inductance Ld'' is the sum of the stator leakage inductance and the parallel
connection of the direct magnetizing inductance, the damper winding leakage inductance and the
field winding leakage inductance
L L
L L L
L L
L L L
L L
d s
md
D F
D F
md
D F
D F
''
(7.37)
There is no field winding on the quadrature axis, and therefore the quadrature subtransient induc-
tance is there
Qmq
Qmq
s
''
q L L
L L L L (7.38)
In the figure, we can also find the equivalent circuits for the time constants d0
'' , d'' , d0
' , d' , q0
'' ,
and q'' . The time constants are known as
d0
'' direct subtransient time constant, the stator winding open
d'' direct subtransient time constant
d0
' direct transient time constant, the stator winding open
d' direct transient time constant
q0
'' quadrature subtransient time constant, the stator winding open
q'' quadrature subtransient time constant.
Now we can easily first determine the machine parameters in the commissioning of the machine.
The subtransient inductance of the quadrature axis is determined by the equivalent circuit
L L L
Lq
''
q
mq
Q
2
, (7.39)
where

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 14/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.14
L L LQ mq Q . (7.40)
The magnetizing inductance Lmq of the quadrature axis is notably larger than the leakage inductance
of the quadrature damper winding LQ. Without a serious error being made, we may state that LQ
Lmq. Thus, the subtransient inductance becomes
L L L
LL L L Lq q
mq
Q
s mq mq s
'' 2
. (7.41)
Ld
Ls
LmdLq Lmq
L' d
Ls
Lmd
LF
L'' d
Ls
Lmd
LF
LD L'' q
Ls
Lmq LQ
Ls
Lmd
LF RF
' d0
Ls
Lmd
LF
'' d0
RD
LD
Ls
Lmq '' q0
RQ
LQ
Ls
Lmd
LF
'' d RD
LD
L s
Lmq '' q RQ
LQ
Ls
Lmd
LF RF
' d
Ls
Figure 7.12 The traditional machine parameters of a synchronous machine and the respective equivalent circuits.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 15/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.15
The obtained subtransient estimate can be used to estimate the stator leakage inductance
L k Ls ls q '' , (7.42)
where the coefficient k ls varies typically between 0.4−0.6. The exact measuring of the stator leak-
age inductance is carried out without the rotor, and therefore such a measurement is not possible at
the actual operating location of the electrical drive; therefore, an estimate has to suffice. The other
parameters required for the current model are obtained by employing the equivalent circuits of Fig.
7.12. Thus, we obtain
L k Ls ls q '' , (7.43)
L L Lmd d s ,
L L Lmq q s ,
L L L L L
L LF
d md s md
d d
'
' , (7.44)
L L
L LLQ
mq
q q
mq
2
'' ,
L L L L L L L
L L L L L L L L L LD
d md F s md F
s F s md md F d F d md
''
'' '' .
When all the parameters according to the two-axis model are known, the resistances RD and RQ of
the damper windings can be calculated
R L
L L
L L L
LD
D
md F
md F
d
d
d
''
''
' , (7.45)
R
L L L
L L
Q
Q
mq s
mq s
q
''
In order to compute the damper currents of the direct and quadrature axes, the following four terms
are required
k modD
D Sd1
, k L
L Lmod
md
md Dd2
, (7.46)
k mod
Q
Q Sq1
, k
L
L Lmod
mq
mq Qq2
.
The current model can be determined by employing Eqs. (7.44)−(7.46). The successful accom-
plishment of this task depends on the accuracy of the traditional motor parameters. Next, we discuss
briefly how these parameters can be found.
The laboratory measurement technology for synchronous machines is defined in the standards IEC
34-4 “Methods for determining synchronous machine quantities from tests” and IEEE Std 115-1983“Test procedures for synchronous machines”. The measurements comprise a DC resistance meas-
urement, a no-load test, a steady-state short-circuit measurement, a slip test, a short-circuit test of

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 16/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.16
the field winding, a sudden three-phase short-circuit measurement, and the measurement of V-
curves. Table 4.1 lists the technical measurement data of a test motor obtained by these measure-
ments at the Laboratory of Electrical Drives at LUT.
Table 4.1: The machine parameters of a test motor determined by standard measurement procedures. The test machine:
14.5 kVA, 400V/21A, 50Hz/1500 rpm.
Parameter value Notes
relative stator resistance r s 0.048
relative field winding resistance r F 0.0083* *in the stator voltage level
reduction factor k ri
4
relative direct synchronous inductance l d 1.19
relative quadrature synchronous inductance l q 0.56
relative direct transient inductance l d’ 0.33
relative direct subtransient inductance l d’’
0.105
relative quadrature subtransient inductance l q’’ -* * cannot be measured
time constant of the field winding do’ 0.236 s
transient time constant of the direct axis d’ 0.054 s
subtransient time constant of the direct axis d’’ 0.024 s
subtransient time constant of the quadrature axis q’’ -* * cannot be measured
The data from the supplier, probably based on a calculation program, are respectively:
Table 4.2 Motor parameters given by the supplier: 14.5 kVA, 400V/21A, 50Hz/1500 rpm.
Parameter Value Notes
relative stator resistance r s 0.048
relative field winding resistance r F 0.00793*
*in the stator voltage level
reduction factor k ri 4.63
relative direct synchronous inductance l d 1.196
relative quadrature synchronous inductance l q 0.475
relative direct transient inductance l d’
0.129
relative direct subtransient inductance l d’’ 0.09
relative quadrature subtransient inductance l q’’
0.109
time constant of the field winding do’ do
’ 0.284 s
transient time constant of the direct axis d’ 0.031 s
subtransient time constant of the direct axis d’’ 0.006 s
subtransient time constant of the quadrature axis q’’ 0.008 s
7.3 Measurement of Motor Parameters by an Electrical Drive (DTC Drive)
The DC resistance of the stator, the direct synchronous inductance at no load at different voltage
steps, and the subtransient inductance both in the direct and quadrature directions can be measured
by a frequency converter. A modern frequency converter has a good measuring and computing ca-
pacity. Therefore, various measurements can be carried out automatically in the commissioning of the machine.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 17/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.17
If the drive can be loaded in the commissioning, and it can be run similarly as in the case of DTC,
i.e., by utilizing both the current model and the model based on the voltage integral in the torque
estimation, the parameters of the current model can be updated both on the direct and quadrature
axes. The torque obtained by the current model and the voltage model has to be equal, and there-
fore, the inductance parameters have to be selected such that this condition is met.
The measurement of the transient inductance is straightforward; in the test, the motor is supplied byshort voltage pulses from the frequency converter, Dd t . By switching on the voltage vectors of
different directions, it is possible to get quite a good picture of the transient inductance of the ma-
chine in different directions. When supplying the machine in the direction of the direct axis of the
machine, the direct-axis subtransient inductance can be calculated
Lu t
i i id
'' sd
sd
sd
sd
sd
sd
d
d
d
d
. (7.47)
Correspondingly, when supplying the machine with a voltage pulse in the direction of the quadra-
ture axis of the machine, d Qt we obtain the quadrature subtransient inductance
Lu t
i i iq
'' sq
sq
sq
sq
sq
sq
d
d
d
d
. (7.48)
In the laboratory, the machine can be measured also in the intermediate positions; Figure 7.13 illus-
trates the subtransient inductance of a synchronous machine as a function of the rotor angle
0.1
0.11
0.12
0.13
0.14
0.15
0.16
0.17
0.180.19
0.2
0 10 20 30 40 50 60 70 80 90
rotor angle/ o
l ''
direct position quadrature position
Figure 7.13 The measurement result of the relative subtransient inductance as a function of rotor angle. The angle is
given in electrical degrees.
Note that in this case, the subtransient inductance is larger in the quadrature direction than in the
direct direction. Evidently, the activity preventing the penetration of the flux of the damper windingto the rotor is not as efficient on the q-axis as it is on the d-axis. Therefore, a short voltage pulse

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 18/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.18
generates a larger flux linkage when the rotor is in the quadrature position than when it is in the di-
rect position.
The direct-axis synchronous inductance of the motor can also be measured when the motor is oper-
ating at no load. The measurement is based on the flux linkage, obtained by integrating from the
voltages and comparing to the measured currents. In the inductance measurement, the motor has to
run at a relatively high speed in order to be able to reduce the uncertainty of the measurement. Themeasurement cannot be carried out before all the transients have settled down, in order for the
damper winding currents to have been completely damped out. The measurement of the synchro-
nous inductance can be performed by varying the field current of the stator and rotor. The first
value for the synchronous inductance can be obtained by completely omitting the direct current of
the rotor, ss0s u Li s . The no-load current is0 is in that case chiefly inductive field current.
As the rotor current is increased, the stator current reduces being finally completely resistive. The
low current is required to overcome mechanical frictions.
The measurement of the quadrature-axis magnetizing inductance is not possible in no-load opera-
tion. Therefore, to be able to measure the quadrature axis, the machine has to be loaded. The mag-netizing inductance and the stator leakage inductance can be calculated by applying the information
on the stator flux linkage in the rotor reference frame.
Li L
i i i
Li L
i i
Li
L
i
i
i i
md
sd d s
d F D
mq
sq q s
q Q
s
sd
d
md ,
D
Q
F D
0
0
0 0.
(7.49)
Figure 7.14 illustrates the measured no-load saturation curves in the d-direction.
0
0.3
0.6
0.9
1.2
1.5
0 0.4 0.8 1.2 1.6 2
imd [pu]
[pu]
Lmd
Figure 7.14 The measured no-load saturation curves for the direct-axis magnetizing inductance and the stator leakage
inductance.
The inductance measurements of the loaded machine were carried out by setting the sum current of
the d-axis imd = id + if + iD at the desired value and by varying the torque, which in turn had an im-
pact on the sum field current of the q-axis imq = iq + iQ. The measurement was repeated at the flux
linkage range ref = 0.3−1.3 pu, the torque varying between t ref = 0−2.5 pu. At each measured point,the measuring result was computed in the control program of the inverter. As a result, we obtained

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 19/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.19
the direct L i t i t md md mqf , and quadrature magnetizing inductance L i t i t mq md mqf , as a
function of imd and imq. The stator leakage inductance was assumed constant. The measured induc-
tance surfaces are illustrated in Fig. 7.15. The figure shows that the current of the quadrature axis
has an effect on the magnetizing inductance of the quadrature axis and vice versa. The effect of the
so-called cross-saturation is thus clearly visible.
0.000.47
0.94 1.42 1.901.55
1.19
0.92
0.710.530.350.180.060.00
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
Lmd [pu]
imd[pu]
imq [pu]
a)
0.00 0.48 0.71 0.95 1.19 1.43
1.67 1.90
1.55
1.19
0.92
0.71
0.530.35
0.00
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
L mq [pu]
imd [pu]
imq [pu]
b)Figure 7.15 a) The magnetizing inductance surface of the d-axis and b) the magnetizing inductance surface of the q-
axis as a function of the sum field currents.
Figure 7.16 illustrates the same inductance surfaces as two-dimensional curves.
0.60
0.70
0.80
0.90
1.00
1.10
1.20
1.30
0.00 0.50 1.00 1.50 2.00
imq = 1.5 pu
imq = 0 pu Lmd[pu]
imd[pu]
0.00
0.20
0.40
0.60
0.80
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Lmq
[pu].
imq[pu]
imd = 2.0 pu
imd = 0.5 pu
Figure 7.16 a) The magnetizing inductance of the d-axis and b) the magnetizing inductance of the q-axis as a function
of the field currents.
Table 4.3 presents a comparison of the results obtained by different methods. The DTC measure-
ment data have been gathered at the nominal operation point. The transient values in particular are
notably different in different methods.
Table 4.3 Comparison of the different measurement methods. Machine: 14.5 kVA, 400V/21A, 50Hz/1500 rpm. *not
measuredx
no-load value,+
measuring point not determined.
Parameter Manufacturer Standard measure-
ment
DTC meas.
pu relative stator resistance r s 0.048 0.048 0.051
relative field winding resistance r F
0.00793 0.0083 -*
reduction factor k ri 4.63 4 3.96
relative direct synchronous inductance l d 1.196x
1.19x
1.066
relative quadrature synchronous inductance l q 0.475+ 0.56x 0.439

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 20/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.20
relative direct transient inductance l d’ 0.129 0.33 -*
relative direct subtransient inductance l d’’ 0.09 0.105 0.125
relative quadrature subtransient inductance l q’’ 0.109 -* 0.194
time constant of the field winding do’ do
’ 0.284 s 0.236 s -*
transient time constant of the direct axis d’ 0.031 s 0.054 s -*
subtransient time constant of the direct axis d’’ 0.006 s 0.024 s -*
subtransient time constant of the quadrature axis q’’ 0.008 s -* -*
7.4 Finite Element Method (FEM) for Determining the Inductances of a Synchronous Ma-
chine
By means of magnetic calculation, the above inductance surfaces can be determined already in the
machine design. Next, the results of FEM calculation are investigated. Magnetic calculation is a
useful tool in the determination of the saturation behaviour of the direct and quadrature magnetizing
inductance. The definition of the inductances at a certain loading point is also possible. However, at
the present, magnetic calculation is still a rather laborious method, and therefore not even the larg-est suppliers calculate all their machines by the FEM, but simpler methods are applied to the ma-
chine calculation.
Figure 7.17 illustrates the cross-section of a small test motor. In the machine, there is a three-phase
winding, the stator slot number Qs = 24, the number of slots per pole and per phase qs = 2, the
length of the stator stack l = 140 mm, the inner diameter of the stator D = 196 mm, and the number
of turns in the stator winding per slot N' s = 56. The field winding is a four-pole construction. The
number of turns per pole is N rp = 220. The direct-axis magnetizing inductance L i i imd Ff d q
0 is
calculated by using different values of the rotor current. In the calculation, also a completely quad-
rature magnetizing can easily be carried out, and thus it is possible to determine L i i imq qf F d
0 .
At the loading points, the values are obtained as qf dmqqf dmd ,, and ,, iii f Liii f L
d-axis
q-axis
+a
+b
+c
+a
-a
-a+a
+a
-a
-a
-b-b
-b-b
+b
+b
+b -c
-c
-c
-c
+c+c
+c
Figure 7.17. The cross-section of the analyzed synchronous machine and its windings.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 21/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.21
In the FEM calculation, in the two-dimensional case in particular, the vector potential A is utilized;
in this case, it is obtained from the equations B = A and A = 0. Figure 7.18 illustrates the
machine running at no load and loaded at the nominal operating point.
d/x
q/y
+a
+a
-b
-c
-a
-aa
a
-b
-c
+b
+b
+c+c
+c+c
-b
-b
sif
+a
s
q/y
d/x
is
if
+a
-a
-a
-b
-b
-c
-c
+b
+b
+c+c-b
-b
+c
+c
m
Figure 7.18 The flux diagram of the machine at no load and at the nominal point. Calculation by MAGNET software
The finite element method yields for instance the air gap flux density, which is naturally distorted
due to the slot openings and the armature reaction. To calculate the magnetizing inductances, it is
necessary to perform the Fourier analysis for the curve, since the space vector theory is based on the
assumption of a sinusoidal curve form. Figure 7.19 depicts the air gap flux density distribution and
its fundamental harmonic at no load.
-1.20
-0.90
-0.60
-0.30
0.00
0.30
0.60
0.90
1.20
0 90 180
periphery angle
B [T]
d-axis q-axis d-axis q-axis
360270
Figure 7.19 Air gap flux density and its fundamental harmonic at nominal no-load operation, calculated by the FEM.
To calculate the inductances, B1 and the phase angle are searched from the result of the Fourier
analysis. The air gap flux is now obtained from the equation

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 22/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.22
'ˆ2'ddcosˆˆ
p1
'
0
2
p1m
p
p
L B L x x
B
L
, (7.50)
where the effective machine length is defined as L’= l +2 is the air gap in the middle of the pole
shoe, p D2
p is the pole pitch of the machine, D is the stator boring and p is the number of pole
pairs. The air gap flux linkage of the phase A is now
' mA p f12
1B L N , (7.51)
f1 is the winding factor of the fundamental harmonic and N is the number of turns of the stator
phase in series. The flux linkages of the phases B and C are calculated accordingly, and thus we can
determine the stator flux linkage vector of the machine
jmA
34π j
mC3π2 j
mBmAm ˆ3
2eet et t
. (7.52)
The flux linkage is divided into direct and quadrature components
md m
mq m
cos
sin(7.53)
finally, inductances are calculated
Li i i i
Li i
i
mdFEM
md
d F D D
mqFEM
mq
q QQ
0
0
(7.54)
Figure 7.20 illustrates the comparison of the measured and calculated results.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 23/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.23
a)
20
25
30
35
40
45
50
55
0 5 10 15 20 25 30 35
imd [A]
calculated
measured
Lmd [mH]
b)
20
22
24
26
28
30
32
34
36
38
40
0 5 10 15 20 25 30 35
Lmq [mH]
imq [A]
Figure 7.20 a) The measured and calculated direct-axis inductance, when there is magnetization only on the direct axis.
b) Calculated quadrature inductance.
From our point of view, the most interesting issue are the results of the FEM analysis for a machine
running under load. Figure 7.21a depicts the behaviour of the direct-axis inductance at the nominal
stator flux linkage at different loads, and the item b illustrates the behaviour of the quadrature in-
ductance. Again, the results deviate somewhat from the measured ones.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 24/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.24
MeasuredFEM
20
22
24
26
28
30
32
34
36
38
40
0 5 10 15 20 25 30 35
Lmd [mH]
imq [A]
imd = 19 A
a)
Measured
FEM
imd =19 A
0 5 10 15 20 25 30 35
Lmq [mH]
imq [A]
25
20
15
10
5
0
b)
Figure 7.21 a) The measured and calculated behaviour of the direct-axis inductance and b) the behaviour of the quadra-
ture-axis inductance when the torque varies between 0−250 %.
The above presentation shows clearly how difficult it is to obtain exact results from the machine.
However, there is a good congruence between the results measured by the DTC inverter and the re-
sults calculated by the FEM method; we may thus conclude that a modern frequency converter is
capable of performing the measurements required for the machine.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 25/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.25
7.5 The Relationship between the Stator Excitation and the Rotor Excitation of a Syn-
chronous Machine
7.5.1 Non-Salient Pole Machine
Let us first consider a non-salient pole synchronous machine. The poly-phase winding, depending
on the number of turns N 1 of the phase, the winding factor of the fundamental harmonic, the
number of pole pairs p, and the phase number m, produces a peak value of the total magnetomotive
force ( s is the amplitude of the fundamental)
s11
sˆ
2π
4ˆ2 i p
N m
. (7.55)
For a three-phase machine, the above is rewritten as
ss1sss1s
ss1s
sπ
262
2π
43ˆ
2π
43ˆ2 I N I
p
N i
p
N
. (7.56)
In a synchronous machine, there is a single-phase rotor, into which direct current is supplied. The
peak value of the total mmf is now
rfDCr 1r r π
4ˆ2 I N . (7.57)
If we want to express the stator current with the direct current of the rotor, the magnetomotive
forces are written to be equal
rfDCs1s
r 1r
s1s
rfDCr 1r s
23
2
π
4
26
π I
N
N
N
I N I
. (7.58)
The relationship between the fundamental of the stator current and the magnetizing DC current is
thus
s1s
r 1r rirfDC
s32
N N k
I I
. (7.59)
Here we must note that the magnetomotive forces given by the equations, if written as equal, do not
really give an equal flux density in the air gap, since the leakage fluxes of the windings are not
equal, and thus inequal parts of the magnetomotive forces of the stator and rotor are exerted to the
air gap.
The same result is obtained by assuming a situation illustrated in Figure 7.22, where one stator
phase is currentless. Thus, at a sinusoidal supply, in the other two phases there flows a current
22
3s I i . (7.60)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 26/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.26
The sum current of the instantaneous currents of the phases that corresponds to the common magne-
tomotive force may thus be written as
i I I yht s
o
s 23
22 30
3
22cos . (7.61)
Figure 7.22 Currents of a symmetric three-phase system,
when one phase current is zero.
The mmf of a "single-phase" stator at that moment is thus
24 3
22 s s 1s s
I N , (7.62)
and the mmf of the rotor is the same as previously, and thus the relationship of the currents is real-
ized as previously.
7.5.2 Salient-Pole Machine
Next, the three different air gaps of a salient-pole internal-pole machine are investigated. The air
gaps seen by the rotor pole excitation are usually shaped by the pole shoes so that as sinusoidal flux
density distribution as possible is obtained by the rotor magnetization on the direct axis.
The pole field has to be shaped so that the length of the density line of the field graph is inversely
proportional to the cosine of the electrical angle, when the frame of reference is fixed in the middle
of the pole shoe. The pole shoes shaped this way generate a sinusoidally distributed magnetic flux
density in the air gap. The stator winding is constructed so that also its magnetomotive force is si-
nusoidally distributed when proceeding along the stator surface. Also this mmf distributed in the air
gap creates a flux in the air gap. Since the air gap is shaped so that the flux generated by the poleexcitation is sinusoidal, it is clear that the flux generated by the stator is not sinusoidal. The three-
phase winding of the stator creates a magnetomotive force of its own, and correspondingly, an own
flux density component to the air gap. In a normally running machine, the flux density in the air gap
is composed of the flux components generated by all the windings of the machine. Next we investi-
gate how the stator magnetizes a shaped air gap.
Assume that the part ' d of the amplitude of the mmf of the stator is exerted to the centre line d of
the pole. Along the pole pitch, the magnetic voltage varies thus as follows
cosˆ'
d
'
d . (7.63)
The permeance d of the passage from this point to the rotor surface is

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 27/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.27
'0
00
cos
2
d
Δ
dd
p
DL
n
A . (7.64)
The magnetic density at the point is thus
2'
d'
0
0d cos
d
d
A B . (7.65)
The proportion of the flux density created by the mmf of the stator current to the air gap is thus pro-
portional to the square of the cosine. However, this density function is often replaced by its funda-
mental harmonic, that is, by a cosine function with an equal flux. The condition for keeping the
magnitude of the flux equal is
π/2
π/2
π/2
π/2
d2'
d'0
0 dcosˆdcosˆ
B . (7.68)
The amplitude of the cosine function is thus
'
d'
d
0'
d
0
0d
ˆ'4
ˆ
B . (7.69)
In the latter form of Eq. (4.59), the air gap d' is an fictitious air gap, which the magnetomotive
force of the stator meets. Its theoretical value is
' ' /d 4 0 . (7.70)
Figure 7.23a illustrates this situation. Equation (7.70) describes the air gap experienced by the stator
in the case of a salient-pole machine, when the air gap is shaped to produce a sinusoidal distribution
by the rotor magnetizing. In reality, the distance at the pole edge from the stator to the rotor cannot
obtain an infinite value, and therefore the theoretical value of Eq. (7.70) is not realized exactly as
such. The most exact value for this air gap can be determined by the FEM method, however, it is
possible to reach quite accurate results also by manual calculation.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 28/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.28
p
Bd1
Bd
s
p
s
Bq1
Bq
Figure 7.23 a). The cos2-shaped density wave Bd created to an air gap shaped by the pole shoe; the density wave is gen-erated by a cosinusoidal mmf s1 occurring at the direct axis of the stator; the figure illustrates also the corresponding
equivalent cosinusoidal fundamental harmonicd1
ˆ B . b) The cosinusoidal mmf distribution s1 of the stator occurring at
the quadrature axis generates the curve Bq. The peak value of the corresponding equivalent density curve isq
ˆ B .
Figure 7.23b illustrates the definition of the quadrature air gap. The axis of the magnetic voltage of
the stator is imagined at the quadrature axis of the machine. The flux density curve on the quadra-
ture axis is sketched and the flux q is calculated. The density amplitude corresponding this flux is
written as
q
q
0q
q 'ˆ'
ˆ
DL p B . (7.71)
'q is the fictitious quadrature air gap. All the magnetomotive forces acting upon the air gap are set
equal: ' ' F d q , in which case the equivalent air gaps behave like the inverses of the density
amplitudes
qd0
qd'
1:
'
1:
'
1ˆ:ˆ:ˆ
B B B . (7.72)
The direct and quadrature equivalent air gap is calculated from this proportion. Note that the direct
and quadrature magnetizing inductances of the stator are inversely proportional to the above air
gaps. As a result, the quadrature synchronous inductance of the traditional salient-pole machine is
usually notably lower than the direct synchronous inductance.
The mmf of the rotor creates thus a sinusoidal flux density distribution on the stator surface, the
peak value of which converges with the smallest air gap 0. The slotting of the stator reduces the air
gap by an amount of the Carter’s coefficient.
0 0
'
k C . (7.73)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 29/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.29
Observed from the stator, the direct air gap appears as regards to the fundamental harmonic theo-
retically according to Eq. (7.70). The length of the air gap has thus become 4/-fold.
Since the field winding is located only on the direct axis, the current ratio of the stator and rotor ex-
citation is required in this direction only. The current ratio is determined by defining the fundamen-
tal harmonics of the flux densities caused by the stator and rotor currents to be equal. Here it is as-
sumed that there are no leakage fluxes and the reluctance of iron is zero, and thus the entire mmf isexerted to the air gaps. The amplitude of the mmf of the stator is now written as
s 1s s s3
2 p
N I
. (7.74)
The fictitious flux density can be calculated accordingly
Bp
N I N I
p1s
1s s s1s s s
32
4
3 2
40
00
0
. (7.75)
The mmf of the rotor is of the shape of a square wave, and its height is
rFDCr
r 2
1 I
p
N . (7.76)
Since the air gap is shaped to produce a sinusoidal density distribution, the peak value of the ficti-
tious flux density becomes now
0
0
rFDCr
1r
2
1
ˆ
I
p
N
B . (7.77)
By comparing Eqs. (7.75) and (7.77) we obtain the current ratio
s1s
r
rFDC
sri
2
23 N
N
I
I k
. (7.78)
This is equal to the result we obtained previously. The ratio is thus the same both for a salient-pole
and non-salient pole machine, assuming that the pole shoe of the rotor of the salient-pole machine is
shaped to produce a sinusoidal distribution. If this is not the case, the current ratio has to be recon-
sidered, and we have to employ the partly empirical form factors given in literature. Equation (7.78)
is not quite exact either, since it is based on the assumption that the air gap met by the stator mmf in
the quadrature direction is infinite; the error is yet not significant, since the direct mmf is small
when approaching the quadrature axis and eventually reduces to zero.
If it is possible to run the permanent short-circuit test by the machine, the current ratio can easily be
determined with the short-circuit test. As we know, in the short circuit, the mmf of the stator currentshould cancel the mmf of the rotor current, and thus the short-circuit test directly produces the cur-

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 30/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.30
rent ratio. A certain magnetizing direct current of the rotor has a corresponding short-circuit current
of the steady state of the stator.
7.5.3 Referring Factor
When referring the resistances from the single-phase rotor winding to the three-phase stator wind-
ing or vice versa, the single-phase rotor DC can be considered to form a current vector of an ficti-tious three-phase rotor. The rotor is imagined to be replaced by a non-salient pole sheet rotor with a
three-phase winding. The three-phase current flowing in the winding generates an equal flux den-
sity in the air gap as the rotating pole wheel magnetized by direct current.
According to the energy principle, an equal power loss has to be generated both in the real rotor and
in the space vector equivalent circuit. When operating with three-phase quantities, the rotor power
is determined as
P R I r r3v r3v 3 2 . (7.79)
This power has to be equal to the power calculated with real rotor quantities
P I RF FDC FDC 2 . (7.80)
We obtain thus
R I
I Rr3v
FDC
r3v
FDC2
23. (7.81)
When we substitute the effective value I r3v of the rotor phase current by the respective stator current I s, we obtain
R I
I R
k Rr3v
FDC
s
FDC
ri
FDC
' 2
2 23
1
3. (7.82)
The same result is obtained also by the following procedure: we replace the single-phase rotor
winding by a three-phase winding with an equal number of turns. The magnetomotive forces of the
single-phase and the fictitious three-phase rotor are written equal per pole pair, and thus we obtain
r3v FDC
rp
r3v
rp
FDC
3
2
4
2 2
4
2
1 1
N
I
N
I . (7.83)
N rp is the number of turns in the rotor pole pair. This yields for the fictitious three-phase current of
the rotor
I I r3v FDC2
3. (7.84)
According to the energy principle, there has to occur an equal power loss both in the real rotor and
in the fictitious three-phase circuit. When operating with three-phase quantities, the rotor power is
determined as
P R I R I R I r r3v r3v r3v FDC r3v FDC
3 3
2
3
2
32
22 . (7.85)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 31/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.31
This power has to be equal to the power calculated with the real rotor quantities, and thus we obtain
the resistance of the fictitious three-phase rotor
R Rr3v FDC3
2. (7.86)
Since the number of phases is equal both in the fictitious rotor and in the stator, the resistance is
now referred to the stator by employing the current ratio determined by the turns and winding fac-
tors
R RN
N R k
r3v FDC
1s s
1r r
FDC ri
'
3
2
1
3
2
2
. (7.87)
7.5.4 Referring (to the Stator) When Applying Space Vectors
When operating with the fictitious three-phase quantities in the rotor, we obtained for the effective
value of the three-phase current of the rotor
I I r3v FDC2
3. (7.88)
When operating with sinusoidal quantities, the peak value of this current is now
i I r3v FDC2
3. (7.89)
When we apply the above to construct the space vector of the rotor current, we obtain the result
shown in Figure 7.24 for the length of the rotor current vector, for instance in a situation where the
current of the phase A is at its positive maximum, and the currents of the phases b and c are a half
of their negative maximum values.
a
a2
1
3 I FDC
1
3 I FDC
2
3I FDC
I I r FDC2
3
Figure 7.24 The formation of the space vector of the current of an fictitious three-phase rotor, when the current of the
phase A is at its positive maximum.
Now, the magnitude of the space vector is thus (2/3) I FDC. By writing the magnetomotive forces of
the space vectors of the stator and rotor equal, we obtain

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 32/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.32
2
3I N N FDC rp r s1 sp i
' . (7.90)
This yields the ratio of the magnitudes of the current vectors
ir
FDC
rp
sp
riav
'
I
N
N k
2
3 1 . (7.91)
The result deviates from the DC reduction by an amount of 2 . In this system, the phase resistance
of the rotor is R Rr3v FDC3
2. When we now calculate the powers by applying space vectors and the
effective value of the direct current and when we write them equal, we obtain
P
N
N I R I R
k I R I R
3
2
3
2
2
3
3
2
2
2
2 2 2
ui
* '
'
rp
1s spFDC r FDC rfDC
riav FDC r FDC FDC
. (7.92)
The above yields for the reduction when operating with space vectors
Rk
Rr
riav
FDC
' 2
3
12 . (7.93)
7.6 Vector Diagram of a Synchronous Machine
Often when analysing the operation of a machine, a vector diagram is employed; the vector diagram
is nearly identical with the effective value phasor diagram, however, unlike the phasor diagram, it is
rotating. Figure 7.25 illustrates the vector diagram of a synchronous machine in the rotor oriented
dq reference frame. The machine operates as a motor and rotates counter-clockwise.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 33/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.33
j LmqiQ
q
d
is m
iD+ jiQ
m
j Lmqiq
j LmdiD
j Lmdid
j LmdiF = emF
s
sLs
is
Lmdid + j Lmqiq
LmdiF
iF
LmdiD
LmqiQ
j s = es
j m = em
Rsis
us
j Lsis
-es
Figure 7.25 The vector diagram of a synchronous machine in a general case in the rotor reference frame. is the elec-
tric angular speed. s is the pole angle of the stator flux linkage, m is the pole angle of the air gap flux linkage, is the
angle between the stator flux linkage and the stator current, and is the angle between the stator current and stator
voltage. is is the stator current vector and us is the stator voltage vector. s is the vector of the stator flux linkage and m
is the vector of air gap flux linkage. es is the back electromagnetic force induced by the stator flux linkage. The figure
also illustrates a small damper winding current iD + j iQ. The entire vector diagram rotates counter-clockwise at an elec-
tric angular speed .
The flux linkage s of the machine is produced as an effect of the stator voltage vector u's from
which the resistive voltage loss is eliminated, and the flux linkage is thus 90 behind the vector. The
perpendicularity is realized in a steady state; however, in a dynamic state, in which there occur for
instance damper winding currents, the condition of perpendicularity is not met. The air gap flux
linkage m differs from the stator flux linkage by the amount of the leakage flux linkage s = Lsis.
In the machine, there occurs an fictitious flux linkage LmdiF created by the field winding; this flux
linkage is modified towards the air gap flux linkage by the armature reactions in the direct ( Lmdid),
and quadrature directions ( Lmqiq). Each flux linkage – also the leakage flux linkage – causes an in-
duction of its own. Considering a motor control, the inductions es = j s and em = j m are of
central importance. The induction es induced by the stator flux linkage is the induced voltage
which, added to the supply voltage, determines the current of the machine i u es s s s / R . The
induction created by the field winding j LmdiF is fictitious, since a flux linkage of such a high
value as represented by LmdiF cannot usually be generated to a machine due to the saturation of iron.
The inductions caused by the armature and damping reactions j Lmdid and j Lmqiq as well as
j LmdiD and j LmqiQ modify this fictitious flux linkage into the real air gap flux linkage. The

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 34/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.34
induction caused by the air gap flux linkage becomes observable if the stator of the machine sud-
denly becomes currentless. Particularly in the field weakening, it is possible that the magnitude of
the air gap flux linkage is notably larger than the magnitude of the stator flux linkage. If the control
of such a machine is terminated for some reason, the situation becomes extremely dangerous, since
the terminal voltage of the machine attempts to rise excessively – first to a value corresponding to
the air gap flux linkage, and finally to a maximum value allowed by the iron of the machine, this
value corresponding to the field current. Figure 7.26 recapitulates the vector diagram of the syn-chronous machine without damper currents.
q
d
ism
m
j Lmqiq
j Lmdid
j Lmd
iF
= emF
s
s
Lsis
Lmqiq
LmdiFiF
j s = es
j m = em
Rsisus
j Lsis
-es = u' s
Lmdid
id
iq
Figure 7.26 vector diagram of the synchronous machine when the damper currents have zero values.
For practical control purposes, the vector diagram can be simplified by omitting several inductions,
Figure 7.27

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 35/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.35
q
d
is m m s
s
Lsis
iF
Rsis
us u' s
Figure 7.27 Simplified vector diagram of a synchronous machine. The machine runs at the power factor cos = 1.
Figure 7.28 depicts the currents of a synchronous machine in different reference frames, and also
shows that the current of the field winding iF takes part in the torque production. In the air gap flux–
torque reference frame T, the field current has namely a component iFT clearly decelerating the
machine.
x
y
r
imm
r
d
Tq
f
iFiFTis
isT
iF
isd
isq
m
m
isy
isx
is
Figure 7.28 Stator current in different reference frames. The reference frames are the stator reference frame xy, the ro-
tor reference frame dq, and the air gap flux–torque reference frame T.
When applying the two-axis model, the different coordinate transformation equations have to pre-
sented in a component form. These component forms are next given by using stator current as the
quantity to be investigated; however, the equations hold also for stator voltages and stator flux link-
ages. When transferring from three-phase quantities to two-phase ones, the following equations are
applied to:
i i i isx sa sb sc
2
3
1
2, (7.94)
i i isy sb sc 1
3, (7.95)
We may write for the zero current

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 36/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.36
i i i is sa sb sc0
1
3 . (7.96)
The transformation formulas into opposite direction are
i i isa sx s0 , (7.97)
i i i isb sx sy s0 1
2
3
2, (7.98)
i i i isc sx sx s0 1
2
3
2. (7.99)
When changing over from the stator reference frame to the rotor reference frame, also the angle be-
tween the reference frame, that is, the rotor position angle r has to be known, as stated previously.
Since the zero component is not included in the current vector, it has to be taken individually into
account.
i i id sx r sy r cos sin , (7.100)
i i iq sx r sy r sin cos , (7.101)
i is0 s0 . (7.102)
The equations into opposite direction are written as
i i isx d r q r cos sin , (7.103)
i i isy d r q r sin cos , (7.104)
i is0 s0 . (7.105)
When transferring directly from the phase quantities to the rotor reference frame, the following
equations are applied to:
i i i id sa r sb r sc r
2
3cos cos cos
(7.106)
i i i iq sa r sb r sc r
2
3sin sin sin
(7.107)
i i i is sa sb sc0
1
3 (7.108)
When transferring to the opposite direction, the equations are
i i i isa d r q r s0 cos sin + (7.109)
i i i isb d r q r s0
cos sin
(7.110)
i i i isc d r q r s0
cos sin
4(7.111)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 37/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.37
7.7 Torque Production of a Synchronous Machine
The synchronous machine operates according to the cross-field principle. The air gap flux linkage
in particular is significant for torque production; previously, we have seen that the current compo-
nent perpendicular to the air gap flux linkage produces torque. As shown in the previous chapter,
the equation for the electric torque T e can be given in various forms; let us briefly recapitulate these
different expressions of torque again. The general equation for the torque of any rotating-field ma-chine can be given as a vector representation
kiiT
sin2
3
2
3sssse p p , (7.112)
where
- p number of pole pairs
- s stator flux linkage vector
- is stator current vector
- angle between vectors- k unit vector aligned with the shaft of the machine
When we analyze the vector diagrams of a synchronous machine, we may state that there is no con-
tradiction between the above representation and the role of the aforementioned air gap flux linkage.
The torque equation can also be expressed in the scalar form
sin2
3sme i pT . (7.113)
According to these equations, the magnitude of torque depends on the magnitudes of the vectorsand the angle between them. The sign of the torque expressed in scalar form depends on the angle
between the vectors. Thus, in the case of synchronous machines, changing over from motor opera-
tion to generator operation or vice versa is accomplished by only changing the sign of the angle be-
tween the vectors.
When Eq. (7.112) is represented by its components in the rotor reference frame, it can be written in
the scalar form:
dqqde2
3ii pT . (7.114)
Further, when we substitute the components of the stator flux linkage to the equation by applying
the inductances and currents, we obtain
dQmqqDFmdqdqde2
3ii Liii Lii L L pT . (7.115)
Finally, we decompose the middle term and rewrite the equation in the form
dQmqqDmdqFmdqdqde 2
3ii Lii Lii Lii L L pT (7.116)
The equation shows that the torque comprises the following parts:

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 38/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.38
the reluctance torque ( Ld Lq)idiq resulting from the magnetic asymmetry; occurs only in salient-
pole machines
a component related to the field current and the quadrature stator current; this is the actual torque
of the machine
two terms describing the torque components of the damper winding currents; these components
occur only in transients
7.8 Simulation of an Electrically Excited Salient-Pole Machine by Constant Parameters
In the context of a synchronous machine, per unit values are often employed. Using per unit values
brings certain benefits; the relative scale of a parameter can be seen directly from the per unit value.
For instance, if the relative synchronous inductance is l d = 2, the value is high. Correspondingly, if
l d = 0.5, the value is low. Hence, it is possible to compare machines, the rated values of which devi-
ate from each other. The role of per unit values diminishes when we change over to the application
of floating-point processors. The fixed-point signal processors require proportioning of all calcula-
tions in the range of 0 ... 1. In that case, the application of per unit values alone does not suffice, butthe figures have to be scaled considerably lower to ensure that for instance the result of a sum or a
product will never exceed one.
Per unit values are obtained by dividing each quantity by its basic value. The basic values are usu-
ally determined as follows:
the peak value of the rated stator phase current in
the peak value of the rated stator phase voltage un
the rated flux linkage, which also corresponds to the rated angular speed /n n n u
the rated impedance Z u in n n
/
The time in which the angle of one radian in electric degrees is travelled at the rated frequency
t n nrad 1 / . The relative time is thus measured as an angle nt
the apparent power corresponding to the rated current and voltage S i un n n3
2
the apparent torque corresponding to the rated power and rated frequency T i un
n
n n3
2
The rotor quantities are referred to the stator voltage level before the per unit values are con-
structed. For example, the stator voltage equation is expressed in the rotor reference frame as
u is
r
s s
r s
r
s
r d
d j R
t
, (7.117)
the above is divided by the basic value of the voltage and it is grouped appropriately, and thus we
obtain
u is
r
n
s n
n
s s
r
n
s
r
n
n
n n
n s
r
n
d
d
j
u
R i
u
R
i t u u
. (7.118)
The equation clearly shows the per unit values

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 39/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.39
uu
s,pu
r s
r
n
u
, (7.119)
ii
s,pu
r s
r
n
i
, (7.120)
r
R i
us
s n
n
, (7.121)
s,pu
r n s
r
n
u, (7.122)
pu
n n
pu n
f n (7.123)
nt . (7.124)
The voltage equation given in per unit values becomes thus
u is,pu
r
s s, pu
r s,pur
pu s,pu
r d
d j r
. (7.125)
The form is equal with the original equation, however, the relative time may cause some problems.
If normal time is used in the per unit value equations, the equation will be rewritten as
u is,pu
r
s s, pu
r
n
s,pu
r
pu s,pu
r d
d j r
t
1
. (7.126)
The per unit values of inductances are equal to the per unit values of reactances. We obtain for in-stance
l L
L
L
u
i
i
uX xm
m
b
m
n
n n
n
n
m m
. (7.127)
The stator flux linkage equation
s s s m r L Li i (7.128)
is divided by the basic value of the flux linkage
b
n
n
u
, (7.129)
which yields
n s
n
n n s
n
s
n
n n m
n
r
n
u
i L
u i
i L
u i
i i. (7.130)
Thus, the flux linkage equation given in per unit values becomes

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 40/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.40
s,pu s s,pu m r,pu l l i i . (7.131)
The motion equation of an electrical machine is written as
3
2
2
2 pJ
p t T s s m
d
d i
. (7.132)
When the motion equation is divided by the basic value of torque, we obtain
3
23
2
3
2
3
2
2
2 p
u i
p
J
p t
u i
p
T
u i
p
s s
n n
n
n n
n
m
n n
n
d
d
i
/
/
/
. (7.133)
This yields the per unit value equation
s,pu s,pu m,pu
d
d i T T J
2
2
. (7.134)
In the above equation, we have a mechanical time constant
T p
J
u i J
n
n
n n
22
3 . (7.135)
The mechanical time constant is the ratio of the kinetic energy of a rotor rotating at synchronous
speed to the apparent power of the machine.
7.9 Current Equations of a Synchronous Machine
The relationship between the flux linkages and currents of a synchronous machine has to be inves-
tigated in the rotor reference frame in order to avoid the division of the direct and quadrature quan-
tities into their components.
The dependence between the flux linkages and currents is determined by an inductance matrix; weomit the pu (per unit value) notations.
L i , (7.136)
or
F
Q
D
q
d
FFDmd
Qmq
FDDmd
mqsq
mdmdsd
F
Q
D
sq
sd
00
000
00
000
00
i
i
i
i
i
l l l
l l
l l l
l l
l l l
, (7.137)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 41/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.41
where
l l l
l l l
l l l l
l l l
l l l l
l l l
sd md s
sq mq s
D md D k
Q mq Q
F md F k
FD md k
(7.138)
Now the currents can be determined from the flux linkages by applying the inverse inductance ma-
trix K L 1 .
i
i
ii
i
k k k
k k
k k k k k
k k k
d
q
D
Q
F
sd dD dF
sq qQ
dD D FD
qQ Q
dF FD F
sd
sq
D
Q
F
0 0
0 0 0
0 00 0 0
0 0
, (7.139)
where
k l l l
k l
k l l l
k l
k l l l
sd
F D FD
sq
Q
D
F sd md
Q
sq
F
sd D md
2
1 2
2
1 2
2
1 , , , ,
k l l l
k l l l
k l
k l l l
dD FD F
md
dF FD D
md
mq
FD
md FD sd
1 1 2
2
1
, , , (7.140)
the denominator components 1 and 2 are written as
1
2 2 2 2
2
2
2
l l l l l l l l l l l
l l l
md FD md D md F sd D F FD sd
Q sq mq
(7.141)
7.10 Simulation of a Synchronous Machine in a Discrete-Time System
With the mathematical representation of a synchronous machine, it is possible to compile a simula-
tion model, the inputs of which are the stator voltage us,pu , the excitation voltage uF,pu , and the me-
chanical angular speed n (for the integration of the rotor angle) of the synchronous machine; theoutputs are the stator current is,pu , the field current iF,pu, the currents of the damper windings iD,pu
and iQ,pu, and finally, the electric torque te of the machine. The simulation presumes naturally a
knowledge of the inductances and resistances of the synchronous machine.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 42/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.42
The simulation progresses according to the flowchart below:
0 Appropriate initial values are initialized for the flux linkage and current parameters,
and the inductance matrix is calculated
1 The derivatives of the stator flux linkage s,pu (k) are calculated in the stator refer-
ence frame in the x and y directions by applying the stator voltage us,pu (k)
s pusx, pusx,n
pusx,1-k k
d
k dr iu
t
s pusy, pusy,n
pusy,1-k k
d
k dr iu
t
(7.142)
2 The derivatives of the flux linkages of the damper winding and the field winding
are calculated in the rotor reference frame
F puF, puF,n puF,
1-k k k
d
dr iu
t
D puD,n puD,
1-k k d
dr i
t
Q puQ,n
puQ,1-k
d
k dr i
t
(7.143)
3 New values are integrated for the flux linkages by applying the obtained derivatives
T t
T t
k d
d1-k k
k d
d1-k k
sysysy
sxsxsx
T t
T t
T t
k d
d1-k k
k d
d1-k k
k d
d1-k k
FFF
QQQ
DDD
(7.144)
4 New values are determined for the currents by applying the inverse inductance ma-
trix k k Ki (7.145)
5 The electric torque is calculated for the machine
k k k k k re
s
im
s
im
s
re
se iit (7.146)
6 The cycle is repeated from item 1
7.11 Implementation of the Vector Control of a Synchronous Machine
Figure 7.29 illustrates the basic signal processing diagram of a synchronous machine. The control-lers in the diagram are usually PI controllers. First, the currents and the rotor position of the motor
are measured; next, a two-phase rotor-oriented representation is adopted. Then, the current compo-

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 43/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.43
nents producing flux linkage and torque are calculated by applying the motor model. The speed
controller produces a torque reference, which in turn yields the respective current reference. The
voltage limiter is an essential element when considering the field-weakening control. The elimina-
tion of cross-effects takes place in a circuit designed for the purpose. The angular speeds in the fig-
ure are electric angular speeds.
U DC
U DC
pulse encoder or absolute encoder
i1
i2
i3
iF
r
ix
ix
ix
iyiy
iy
t et eim
im
im
iyref t e ref
im ref ix ref
us0
ûx
ûyref
uxref
uyref
uxref
uy ref
Excitationcontrol
uFref
PWMmodulator-
S A
S B
S C
S1,S2,S3,
32
ux
uy
ix
iy
iF
r
motor model
curr.contr.
current
contr.
torque
contr.speed
contr.
flux
link.
contr
volt.
limiter
removal of.
cross eff.
r
r,ref
r
r
r
r
e j r
ref
Figure 7.29 The current vector control for a synchronous machine in a flux oriented system.
First, we investigate separately the determination of the reference values for the field current com-
ponents and for the current components producing electric torque. These current references are cal-
culated in the flux linkage–torque reference frame. The axes of this reference frame are known as
the flux linkage and torque axes; these axes were introduced in Figure 7.4. Thus, the current refer-
ences are from now on designated as the flux linkage-aligned current reference and the torque axis-
aligned current reference.
The torque reference is obtained from the output of the speed controller; the input of the controller
comprises the difference of the speed reference and the actual value. The speed controller is a PI
controller. The speed reference is obtained form the system controlling the process. Since the elec-tric torque is proportional to the magnitudes of the stator current and the stator flux linkage, the cur-
rent reference aligned with the torque axis is obtained when the torque reference is divided by the
flux linkage reference.
The flux linkage axis-oriented current reference is obtained from the output of the flux linkage con-
troller. The flux linkage controller is also a PI controller. The input consists of the difference of the
field current reference and the actual value. The flux linkage reference depends on the actual value
of the rotation speed. The flux linkage is kept at the rated value when operating below the rated
speed. At speeds above the rated speed, the flux linkage is reduced inversely proportional to the
speed; the latter speed range is known as the field weakening range.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 44/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.44
When the frequency rises above the rated frequency of the machine, the terminal voltage of the ma-
chine is limited to the rated value by utilizing the field weakening range. Let us first consider the
equation for the rotating voltage in the stator reference frame:
es s j . (7.147)
It suffices to investigate only the magnitudes:
es s . (7.148)
For a synchronous machine, the following is known about the mechanical angular speed:
2n n f
p, , (7.149)
mechanical angular speed
n rotation speed [1/s]
f frequency
p number of pole pairs in the machine.
Bearing in mind that the magnitude of the stator voltage |us| differs from the magnitude of the rotat-
ing voltage |es| only for the amount of the resistive voltage losses, we may write after the substitu-
tions:
us s 2 p
f . (7.150)
If we consider the case from the point of view of the flux linkage, and take only the proportional
relationships into account, we obtain
s| ~us
f . (7.151)
Here we see that the flux linkage remains constant, if the ratio of the terminal voltage and the fre-
quency is kept constant. We can also see that the voltage remains constant, if the flux linkage is re-
duced inversely proportional to the frequency. Figure 7.30 illustrates the stator flux linkage and the
voltage as a function of frequency. If the flux linkage of the machine were not allowed to diminish,
it would be necessary to increase the stator voltage proportional to the frequency also in future (the
dashed extension of the upward line in Figure 7.30).

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 45/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.45
s
f, , f N , ,
field weakening rangeconstant flux range
us
us s
sus
0 1 2 3
1
0
Figure 7.30 The constant flux linkage range and the field weakening range of a synchronous machine. On the horizon-tal axis, there are the frequency f and the electric angular frequency or the mechanical angular frequency . f N, N,
and N are their rated values. On the vertical axis, there are the stator voltage us and the stator flux linkage s. U N and
N are their rated values. In the constant flux range, the voltage and frequency are allowed to increase in equal propor-
tion, and thus the magnitude of the stator flux linkage is kept constant. Above the nominal operating point, the flux
linkage is reduced inversely proportional to the speed and frequency, and thus the voltage can be kept constant.
However, the stator voltage cannot be increased as described above, since the voltage rectified from
the line voltage cannot be raised above this limit in a reasonable way. On the other hand, the deter-
mination of the field weakening point is an essential part of electrical machine design, since it is
usually advisable to dimension the motor in such a way that at high speeds, the field weakening is
applied. Otherwise, the motor should be dimensioned unfavourably large to reach the desired torque
at low rotation speeds. Selecting a correct field weakening point is essential in dimensioning the
machine to suit the purposes.
The actual values of the stator and air gap flux linkage are determined by applying the flux linkage
equations of the machine; therefore, measurement data of the phase currents, the field current, the
rotor position angle and the calculated damper winding currents are required. The phase currents
are transformed into currents in the rotor reference frame; for the transformation, information on the
rotor position angle is required.
sd md s d md d D F s d L i L i i i L i ( ) , (7.152)
sq mq s q mq q Q s q L i L i i L i ( ) . (7.153)
The obtained direct-axis and quadrature axis components are employed in calculating the magni-
tude of the flux linkage and the pole angle.
s sd
2
sq
2 , (7.154)
m md
2
mq
2 , (7.155)
s
sq
sd arctan , (7.156)

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 46/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.46
m
mq
md
arctan (7.157)
This calculation method for the flux linkages is commonly known as the current model. Since it is
impossible to measure the damper winding currents, they have to be eliminated, and appropriate
time constant representations are employed instead. Let us consider this elimination task in the rotor
reference frame; first, the direct and quadrature flux linkage components are written as
md md md md F d D i L L i i i , (7.158)
mq mq mq mq q Q i L L i i , (7.159)
and the voltage equation of the direct-axis damper winding of the rotor
u R it
R it
i LD D D
D
D D md D D
d
d
d
d 0 . (7.160)
Next, the time constants describing the rotor damping are adopted
rDmD D
D
L L
R
, (7.161)
rDD
D
L
R. (7.162)
The equation for the flux linkage is substituted to the voltage equation
0 R it
L i i i i LD D md F d D D D
d
d , (7.163)
the expression is developed somewhat further
0
i
t
L
Ri i i i
L
RD
md
D
F d D D
D
D
d
d
, (7.164)
0
i
t
L
Ri i i
L L
RD
md
D
F d D
D md
D
d
d
. (7.165)
Now we obtain
1
d
d
d
d
D md
DD
md
DF dt
L L
Ri
t
L
Ri i
, (7.166)
1
rD D rD F d rD F d
d
d
d
d
d
dt i
t i i
t i i , (7.167)
it
i i it
i iD rD F d D rD F d
d
d
d
d . (7.168)
Both sides of the equation are multiplied by the magnetizing inductance, and the equation for the air gap flux linkage is added to both sides

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 47/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.47
rD md F d D md F d D md F d rD md F d
d
d
d
dt L i i i L i i i L i i
t L i i . (7.169)
Now, the flux linkage equation can be rewritten as
rD md md md F d rD md F d
d
d
d
dt L i i t L i i , (7.169)
the air gap flux linkage can be solved from the above equation
md md F d
rD
rD
d
dd
d
L i i t
t
1
1
. (7.170)
Correspondingly, it is possible to determine a representation for the quadrature-axis air gap flux
linkage components that is dependent on the quadrature-axis time constants of the damper winding
mq mq q
rQ
rQ
d
dd
d
L i t
t
1
1
. (7.171)
If the information on the damper winding currents is required, these currents can be solved by di-
viding the flux linkage terms by the respective magnetizing inductances.
i i i L
i i t
t
D F d
md
mdF d
rD
rD
d
dd
d
1
1
, (7.172)
i i i t
t
D F d
rD
rD
d
dd
d
1
1
1
, (7.173)
and
i i L
i t
t
Q q
mq
mq
q
rQ
rQ
d
dd
d
1
1
. (7.174)
i i t
t
Q q
rQ
rQ
d
dd
d
1
1
1
. (7.175)
The time constants for the leakage components are so short when compared with the damping time
constants in the denominators that these components can be neglected in certain cases. The damper
winding currents are in then calculated of the other currents of the dq plane in the current model,
since the damper winding currents cannot be measured. The equations are transformed to the
Laplace domain and the effect of Canay inductance is added

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 48/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.48
i K i K i sD td d tf F
rD
1
11
, (7.176)
i K i sQ tq q
rQ
1
11
. (7.177)
The block diagrams corresponding to the equations are presented in Figure 7.31.
i
i i
i
i
K
F
d
q Q
D
tq
K tF
K td
Figure 7.31 Determining the damper winding currents from other currents in the dq plane. iF is the field current, id and
iq are the stator current components in the rotor reference frame, and iD and iQ are the calculated damper winding cur-rents. The time constants of the filter blocks are rD and rQ. K tF, K td, and K tq are the constant factors of the figure.
The parameters required in determining the damper winding currents, i.e., the coefficients and time
constants of the filters, are obtained from
K L
L L Ltd
md
md k D
, (7.178)
K L L
L L LtF
md k
md k D
, (7.179)
K L
L Ltq
mq
mq Q
, (7.180)
rDmd k D
D
L L L
R
, (7.181)
rQmq Q
Q
L L
R
. (7.182)
In the following example, a stator flux linkage oriented control is investigated. The current refer-
ences that are aligned with the flux linkage axis and the perpendicular effective power axis as well
as the sine and cosine of the pole angle of the stator flux linkage are obtained by the method pre-sented in Fig. 7.32.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 49/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.49
abc
3
2
dq
i
Calcul.
of
stator
flux link.
with
curr.
model
sin s
| |F
id
nref
sref
Flux controller
Function block for generating
flux linkage reference
cos s
nact
T ref iT ref
i ref
sact
iq
isa
isb
isc
r
Figure 7.32 Calculation of the current references. iTref is the current reference aligned with the effective power axis and
iref is the current reference aligned with the stator flux linkage axis. s is the pole angle of the stator flux linkage, | s| is
the magnitude and | sref | is the reference value. nref is the speed reference and n is the actual value. iF is the actual value
of the field current, isa, isb, and isc are the actual values of the stator phase currents. The block 32 performs the trans-
formation from the phase currents into the currents in the rotor reference frame. id and iq are the components of the ac-
tual value of the stator current in the rotor reference frame. r is the rotor position angle.
In addition to the current model, the stator flux linkage can be determined also by applying the volt-age model. In the voltage model, the flux linkage is integrated from the supply voltage. The model
is not applicable to zero speed or low-speed operation, when the voltage is too low. Furthermore,
also the rotor angle has to be known in order to be able to transfer the flux linkage to the rotor ref-
erence frame, where its magnitude and pole angle would be known.
The next phase in the vector control is the construction of the current references in the rotor refer-
ence frame. Now, the pole angle of the stator flux linkage is required, since we change over from
the flux linkage reference frame to the rotor reference frame. The required equations are given be-
low.
Tref sref sdohje sincos iii (7.183)
Tref sref sqohje cossin iii (7.184)
The above information is expressed in the block diagram of Figure 7.33.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 50/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.50
sin s
cos s
iT ref
i ref
iqT re f
idT re f
id ref
iq re f
idref
iqref
Figure 7.33 Calculation of the current references of the rotor reference frame from the current references of the stator
flux linkage reference frame. iTref is the quadrature-axis current reference and iref is the current reference aligned with
the stator flux linkage axis. s is the pole angle of the stator flux linkage, idyref is the reference of the quadrature-axis
current and idref is the reference of the direct-axis current that magnetizes the machine in the direction of the stator flux
linkage. idref is the direct-axis current reference and iqref is the quadrature-axis current reference.
The next phase is the current control, Figure 7.34. An integral control is performed for the currents
of the rotor reference frame. Next, the feedforward from the rotating voltages is added to outputs of
these current signals. Since the rotating voltages of the machine are quite close to the terminal volt-
ages, it is easier to adjust the output of the controller to the correct range, and the model has to cor-
rect only the errors caused by the non-ideality of the model and the non-linearity of the cyclocon-
verter bridges. Then, the obtained reference values are transformed into phase values. Since the in-
tegration is carried out in the rotor reference frame, the signals to be integrated are DC signals and
we avoid for instance phase errors.
Before the proportional control (P-control), the dq current references are transformed into phasecurrent references, since the P-control is performed for phase currents unlike the I-control. Because
the P-control is performed for phase quantities, it is easier to prevent the occurrence of the zero
component. The zero component is not detectable in the currents of the rotor reference frame, as it
was shown previously. The P-controllers yield the other components for the reference values. These
components are summed up for different phases, and thus, we obtain the reference values, which
are by nature chiefly voltage references for different phases. The references are modified further to
produce the ignition angle reference for the thyristor igniters.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 51/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.51
i
dq
2
3abc
dref
iqref
id
iqd
q
isa, ref
isa
isb, ref
isc, ref
isc
isb
u sa, ref
u sb, ref
u sc, ref
sa
r
r
sb
sc3abc
dq
2
Figure 7.34 The current control of the stator. Part I in the dq plane, the feedforwards from the rotating voltages and the
P part for the phase quantities. idref is the current reference aligned with the d-axis and iqref is the current reference
aligned with the q-axis. r is the rotor angle, q is the quadrature component of the stator flux linkage. - q is the di-
rect-axis rotating voltage. d is the quadrature-axis rotating voltage. is the electric angular speed. idref and iqref are
the current references in the rotor reference frame and isa,ref , isb,ref and isc,ref are the references of the stator phase currents.
id, iq, isa, isb, and isc are the respective actual values of the currents. 2/3 blocks perform the transformation from the rotor
reference frame to the stator phase quantities. usa,ref , usb,ref and usc,ref are the voltage references for different phases and
sa, sb, and sc are the control angles for the bridges of different phases.
The field current is an essential quantity when considering the operation of the machine. In the tran-
sient states, it has to compensate the negative effect of the direct-axis stator current and also to
maintain the desired power factor of the stator. If the target is to keep the power factor of the stator
one, the field current reference can be calculated as follows:
md
dref dssref Fref
cos
L
i Li
, (7.185)
where
- iFref is the reference value of the field current- | sref | is the reference value of the stator flux linkage
- s is the pole angle of the stator flux linkage
- Ld is the direct-axis synchronous inductance
- Lmd is the direct-axis magnetizing inductance
Also a PI controller is applied in the control of the field current, and the controller yields chiefly the
voltage reference, from which the control angle reference is modified for the excitation bridge as
shown in Figure 7.35. The control of the field current has to be tuned correctly to avoid a control
that would oscillate in the transients. The problem with the reference value calculated above is that
the magnetizing inductance does not remain constant, and therefore it should be estimated beforethe calculation process.

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 52/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.52
i
i
Calc. of the
reference for
field
current
uF
dref
sref
Fref F
s
Field current controller
iFref
Figure 7.35 The field current controller. | sref | is the reference value of the magnitude of the stator flux linkage, idref is
the reference value of the current id, s is the load angle and iF is the field current. uFref is the voltage reference and F is
the control angle for the excitation bridge.
In the above case, the vector control comprises only the current model and the respective coordinate
transformations of the currents, the flux controller, and the generation of the direct and quadraturecurrent reference. The rest belongs to the ordinary control system with the controllers. This example
of a vector control of a synchronous machine is based on a concrete cycloconverter drive manufac-
tured by ABB. The control has thus been implemented as stator flux linkage oriented. We may now
ask whether it is necessary to implement the vector control always as flux linkage oriented, since, as
we know, the leakage flux linkage of the stator flux linkage does not produce torque. However, in
the voltage source drives – also the cycloconverter is of this type – it is necessary to ensure that the
voltage is sufficient, and therefore a control based on the stator flux linkage is a justified choice.
Figure 7.32 depicts the current reference iTref , although we may well claim that this current alone
does not produce the torque, since it is not perpendicular to the air gap flux linkage. A control based
on the air gap flux linkage would best correspond to the control of a fully compensated DC ma-
chine; however, the control is based on the stator flux linkage due to its voltage dependence. Figure
7.36 illustrates the difference between the controls based on the stator flux linkage and on the air
gap flux linkage.
q
d
ism
m
s
s Lsis
iF
us
cos = 1
q
d
ism
m
s
s Lsis
iF
us
cos < 1
id id
Figure 7.36 Controls based on the stator flux linkage and on the air gap flux linkage.
The figure shows that when operating at a rated voltage and keeping the power factor and the mag-
nitude of the stator current at the value one, a certain torque is obtained (e.g. rated torque). When
the stator current is kept perpendicular to the air gap flux linkage, and the voltage determines the
length of the stator flux linkage, the same current produces less power than in the previous case,
since the stator flux linkage has now decreased. The power has now decreased in accordance with
cos = 0.85. The same applies to the torque. Although the magnitude of the current remains thesame, the air gap flux linkage is now 15 % shorter, although the torque has decreased by 85 % of
the value of the left-hand illustration. Note also the respective reduction in the field current. Thus

7/28/2019 01 J Pyrhonen - Synch Machn
http://slidepdf.com/reader/full/01-j-pyrhonen-synch-machn 53/53
Electrical Drives Juha Pyrhönen, LUT, Department of Electrical Engineering 7.53
we may state that when operating at a certain voltage, it is advisable to select a control based on the
stator flux linkage, and to apply the power factor cos = 1.
Figure 7.37 illustrates the schematic control diagram of the cycloconverter based on the stator flux
linkage.
abc
3
2dq
i
Calc. of stator flux
linkagewith
currentmodel
| |
F
i sa
isb
isc
i q
i d
s
sin
cos s
s
n
nref T ref
sref
iTref
iref
r
Flux controller
Speed PI controller
Functtion bloc for flux link. ref.
i dTref
i qTref
idref
iqref
idq
2
3
abc
dref
iqref i
d
iq d
q
isa, ref
isaisb, ref
isc, ref
isc
isb
usa, ref
usb, ref
usc, ref
sa
r
r
sb
sc
3
abc
dq
2
i
i
K
Q
D
tq
K tF
K td
i
i
Calc. of theref. for field current
u
F
dref
sref
Foref F
s
Field current controller iFref
s
usa
sb
sc
u
u
Current controllers
Figure 7.37 A schematic diagram of a stator flux linkage based cycloconverter drive.
A cycloconverter drive can also operate as a generator, and therefore we introduce the vector dia-
gram of a synchronous machine also in generator operation. The representation follows the same
logic as in the case of motor operation.
q
d
i = 0 m, s, iF
us
q
d m
iF
us
cos = 1
id