
What is Linear Algebra? Notation:. Linear Transformation Linear Operator Matrix Multiplication...
42
What is Linear Algebra? r y = A r x + r b Notation:
-
date post
20-Dec-2015 -
Category
Documents
-
view
228 -
download
1
Transcript of What is Linear Algebra? Notation:. Linear Transformation Linear Operator Matrix Multiplication...

What is Linear Algebra?
€
ry = A
r x +
r b
Notation:

Linear Transformation
Linear OperatorMatrix Multiplication
n-Dimensional Linear Mapping
€
ry = A
r x
Linear Coordinate Transformation

Matrix Multiplication
€
ry = A
r x
7
6
3
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥=
0 1 01 0 11 −1 3
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
472
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥

Just a common kind of function
Mappings from Input to Outputs
€
y = f (x)
€
x
€
y
€
fdoseresponse
contrast firing ratecolumn
space
row space
€
ry = A
r x
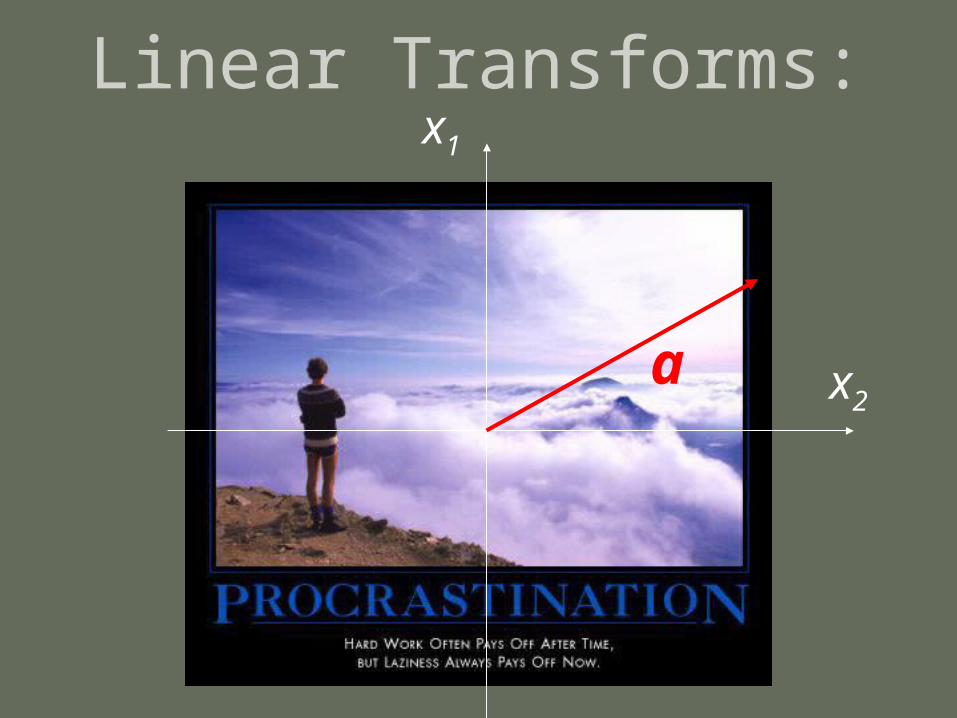
Linear Transforms:x1
x2a

a
Linear Transforms:Identity
b

Linear Transforms:Stretch and Squash
ab
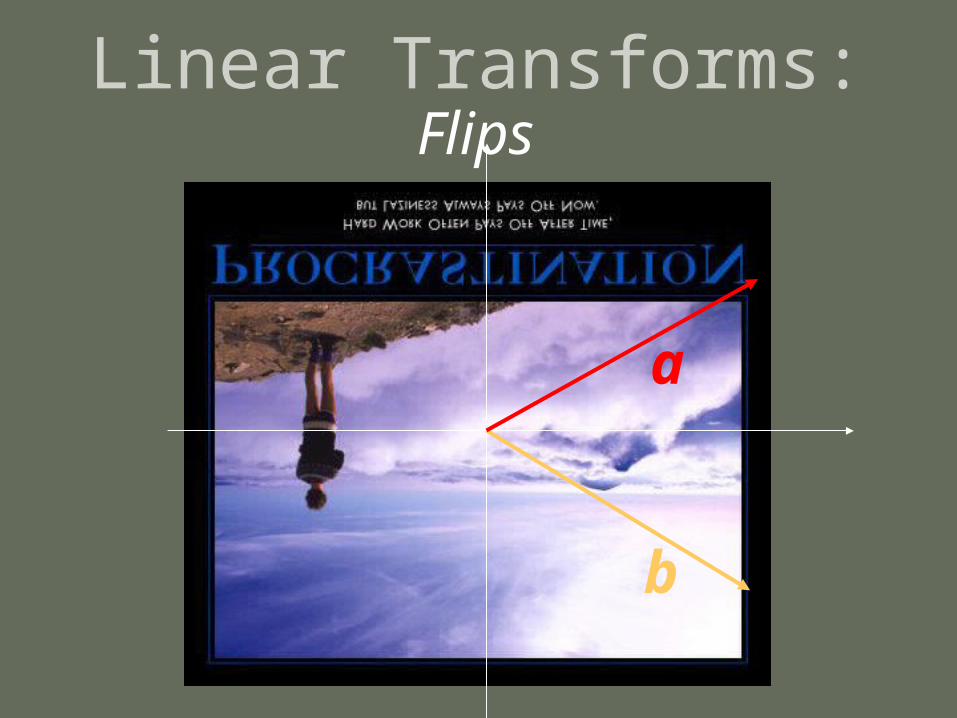
Linear Transforms:Flips
b
a

Linear Transforms:Rotation
b
a
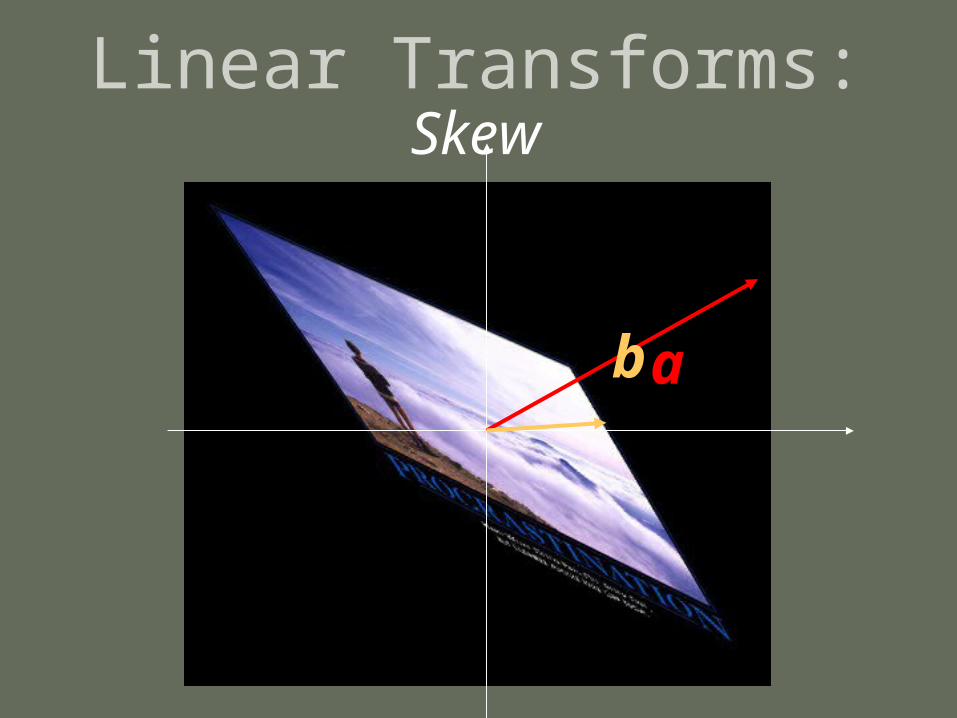
Linear Transforms:Skew
ab
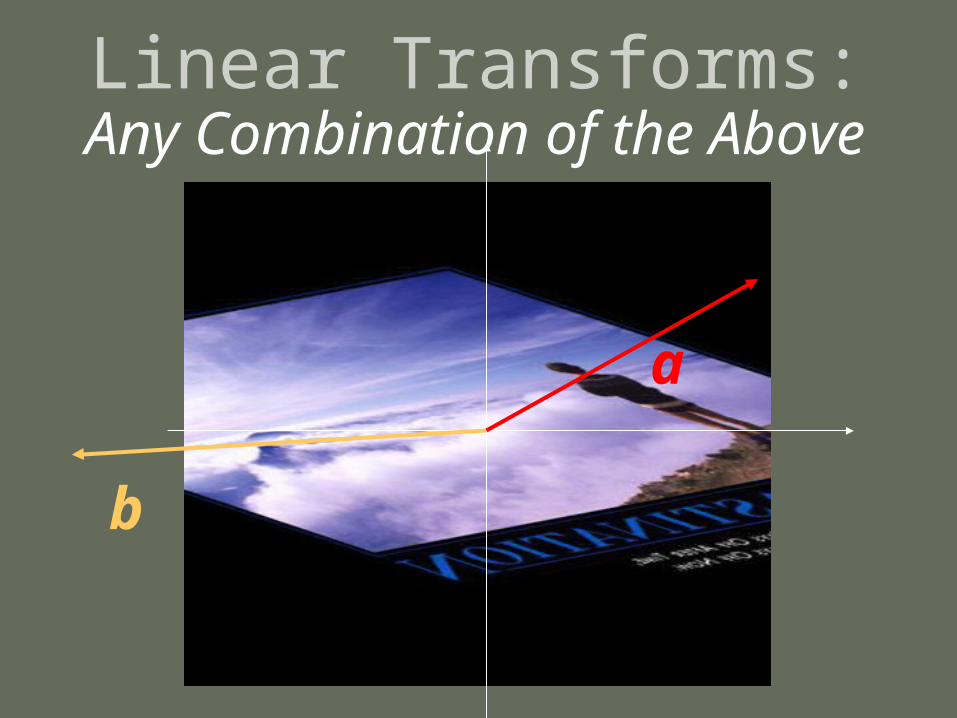
Linear Transforms:Any Combination of the Above
b
a

Linear Transforms:
€
RFSRSSr x
€
RFSRSS = A
Mix and Match, Collect the Whole Set
€
=Ar x
Singular Value Decomposition:
€
A = UDVAny Linear Transform can be written as:
a rotation, a stretch and flip, and another rotation
EigenVectors:
Vat gözinta, cümzouta.
€
λ r
e = Ar e
‘eigen’ is German for ‘self’
a
Linear Transforms:Identity
b

Linear Transforms:Flips
b
a
Linear Transforms:Rotation
b
a
But What’s this good for?

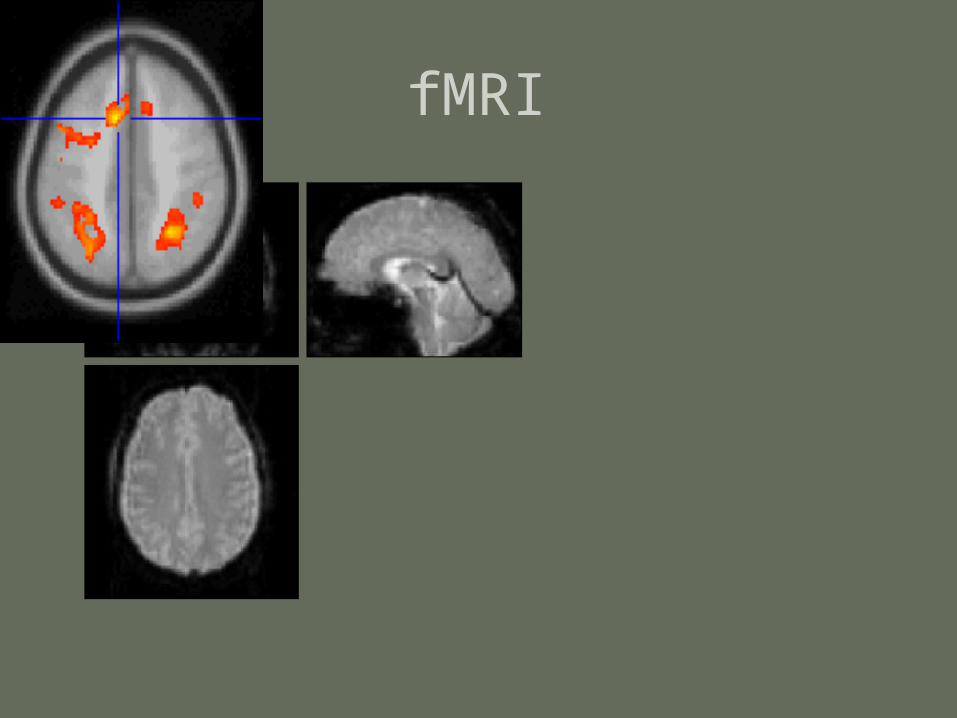
fMRI
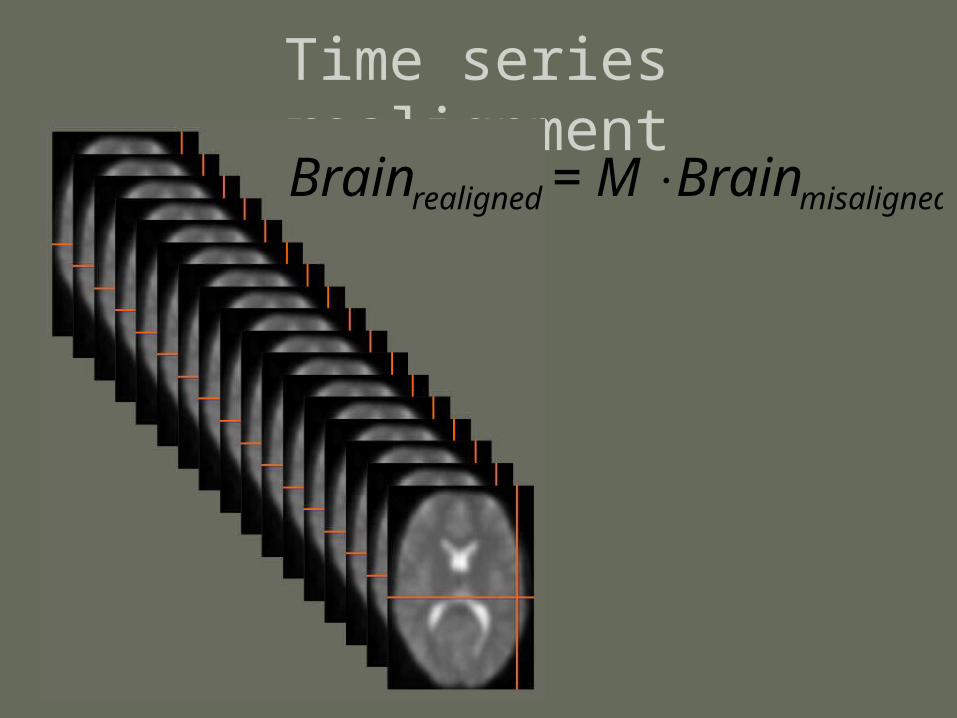
Time series realignment
€
Brainrealigned = M ⋅Brainmisaligned
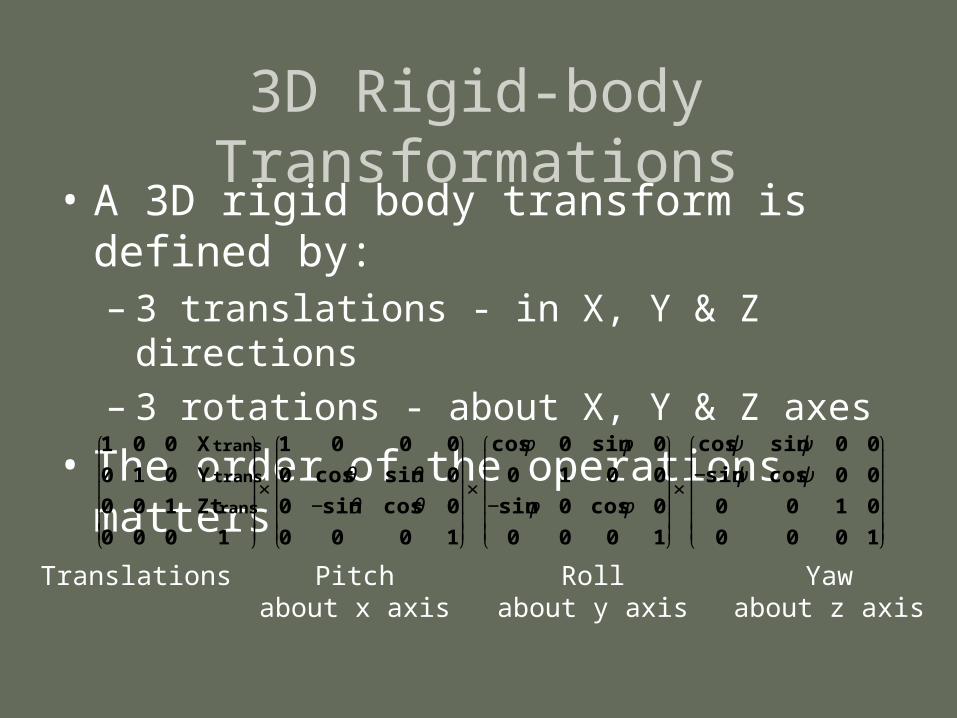
3D Rigid-body Transformations• A 3D rigid body transform is defined by:
– 3 translations - in X, Y & Z directions
– 3 rotations - about X, Y & Z axes
• The order of the operations matters
€
1 0 0 Xtrans
0 1 0 Ytrans
0 0 1 Ztrans
0 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟ ⎟ ⎟
×
1 0 0 0
0 cosθ sinθ 0
0 −sinθ cosθ 0
0 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟ ⎟ ⎟
×
cosφ 0 sinφ 0
0 1 0 0
−sinφ 0 cosφ 0
0 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟ ⎟ ⎟
×
cosψ sinψ 0 0
−sinψ cosψ 0 0
0 0 1 0
0 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟ ⎟ ⎟
Translations Pitchabout x axis
Rollabout y axis
Yawabout z axis

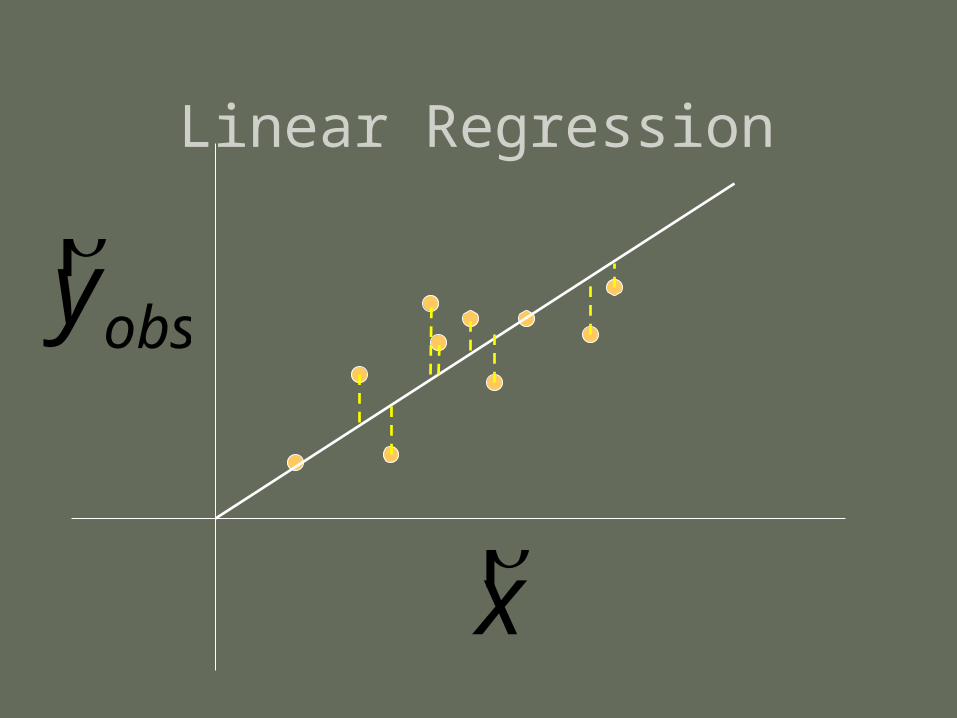
Linear Regression

Linear Regression

Linear Regression
€
ry obs
€
rx
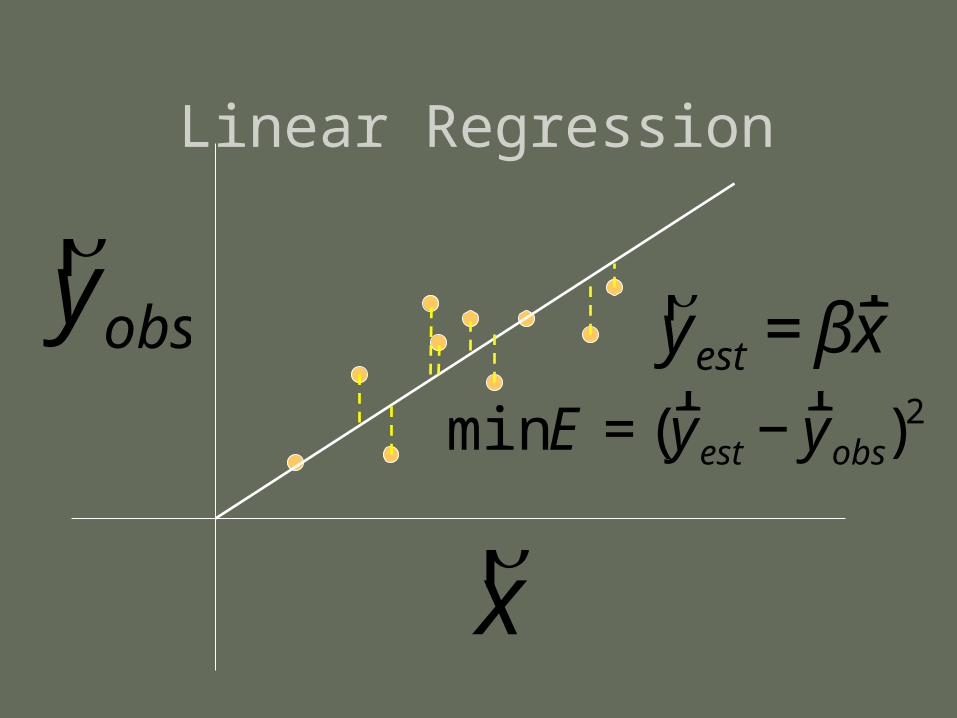
Linear Regression
€
ry est = β
r x
€
min E = (r y est −
r y obs)
2
Linear Regression
€
ry obs
€
rx
€
ry est = β
r x
€
min E = (r y est −
r y obs)
2
Linear Regression
€
Y = Xr β
€
ry = β 0 + β1
r x 1 + β 2
r x 2
Linear Regression
€
Y = Xr β
€
rβ =(X ' X)−1 X 'Y
fMRI

Intensity
Tim
e
Regression model
= β1 β2+ + erro
r
x1 x2 ε
ε∼Ν0 σ2Ι(error is normal andindependently and
identically distributed)
Question: Is there a change in the BOLD response between listening and rest?
Question: Is there a change in the BOLD response between listening and rest?
Hypothesis test: β1 = 0?(using t-statistic)
General case

Y = β1 X1 β2 X2 ε
(1,1,1)
(x1, x2, x3)X1
X2O
Y1 x1 1 β1 ε1
Y2 = x2 1 + ε2
Y3 x3 1 β2 ε3
DATA(Y1, Y2, Y3)
Y
design space
Geometrical perspective
Linear Regression
€
ry obs
€
rx

What is Differential Equation?
€
d
dtf t( ) = g t( )
Let’s take this a bit further:
What is Differential Equation?
€
d
dt
r f t( ) =
r g t( )
Let’s take this a bit further:
€
ry = A
r x
And you all remember linear systems:

Linear Dynamical Systems!
€
d
dt
r f t( ) = A
r f t( )
Can you read this?

Phase Space:f1
f2
€
rf 0( )
€
d
dt
r f t( ) = A
r f t( )
What happens if Ais a stretcher?
€
rf 1( )
€
rf 2( )
Differential Linear Systems
€
d
dt
r f t( ) = A
r f t( )
It is the nature of A which determines the behavior of the system

Differential Linear Systems
€
d
dt
r f t( ) = A
r f t( )
The return of Eigenvectors...

Differential Linear Systems
Nonlinear Dynamical Systems



















