Cvcofliverandspleen 140720222447-phpapp02-140820043744-phpapp02

of 36
Upload
baladivya15Category
view
216download
08/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
1/88
A
Major Project Report
On
Vehicle Tracking System using GSM and GPS
Submitted in partial fulfillment of the requirement for the degree of
BACHELOR OF TECHNOLOGY In
ELECTRONICS & COMMUNICATION ENGINEERING
Submitted by
CH. Bharath. 107B1A0435
P. Vijay Kumar. 107B1A0437
P. Anil Reddy. 107B1A0449
B. Abhishek. 107B1A0468
Under the Esteemed Guidance of
Mr. B. SRINIVASM. Tech, MISTE, AMIE, (Ph.D)
Ass i s t an t P ro fes sor
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
SAGAR INSTITUTE OF TECHNOLOGY (SITECH)
SAGAR GROUP OF INSTITUTIONS(Affiliated to JNTU Hyderabad and Approved by AICTE, New Delhi)
Flame of Forest, Urella-Chevella Road, Chevella, RR District
(2010-2014)
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
2/88
Certificate
This is to certify that this dissertation work entitled “Vehicle Tracking System using GSM
and GPS” is a bonafide work carried out by CH. Bharath (107B1A0435), P. Vijay Kumar
(107B1A0437), P. Anil Reddy (107B1A0449) and B. Abhishek (107B1A0468) in partial
fulfillment of the requirements for the award of the degree of Bachelor of Technology in
Electronics and Communication Engineering, from “Sagar Institute of Technology”, during the period 2013 under the guidance and supervision.
Head of the Department
Prof. V. Bhagya Raju
M. Tech, (Ph.D.)
Professor & HOD of ECE.
Internal Guide
Mr. B. SRINIVAS
M. Tech, MISTE, AMIE, (Ph.D.)
Ass i s t an t P ro fes sor
Depar tment o f E CE
External Examiner
SAGAR GROUP OF INSTITUTINSSAGAR INSTITUTE OF TECHNOLOGY
(Affiliated to JNTU Hyderabad and Approved by AICTE, New Delhi)
Flame of Forest, Urella- Chevella Road, Chevella, RR Dist.
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
3/88
DECLARATION
We hereby declare that the project “Vehicle Tracking System using GSM and GPS”
submitted in the partial fulfilment of that requirements for the award of the degree of
bachelor of technology in electronics and communication engineering from Sagar
Institute Of Engineering and Technology, Chevella, affiliated to JNTU, Hyderabad is an
authentic work and has not been submitted to any other university/institute for award of
degree.
CH. Bharath (107B1A0435)
P. Vijay Kumar (107B1A0437)
P. Anil Reddy (107B1A0449)
B. Abhishek (107B1A0468)
i
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
4/88
ACKNOWLEDGEMENT
With great pleasure we want to take this opportunity to express our heartfelt gratitude
to all the people who helped in making this Major Project work a grand success.
We are grateful to Prof.V.Bhagya Raju, Professor & Head of Electronics andCommunication Engineering department, Mr. B. Srinivas, Asst. Prof. Dept of ECE and P.
Tejaswi Project Assistant at ECIL for their valuable suggestions and guidance during the
execution of this project and also for giving us moral support throughout the period of our
study in SITECH.
We are also highly indebted to our principal Dr. V.V. Satyanarayana, for giving
us the permission to carry out this Major Project.
We would like to thank the teaching and non-teaching staff of ECE Department for sharing
their knowledge with us.
Last but not the least we express our sincere thanks to Dr.W.R.Reddy and all the
founders of Sagar Institute of Technology for their continuous care towards our
achievements.
ii
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
5/88
Index
Declaration i
Acknowledgement ii
Index iii
List of Figures viii
List of Tables ix
Abbreviations x
Chapter 1: Introduction To VTS 1
1.1 Introduction 1
1.2 Vehicle Security using VTS 2
1.3 Active versus Passive Tracking 4
1.4 Types of GPS Vehicle Tracking 5
1.5 Typical Architecture 6
1.6 History of Vehicle Tracking 7
1.6.1 Early Technology 8
1.6.2 New development in technology 9
1.7 Vehicle Tracking System Features 9
1.7.1 Vehicle Tracking Benefits 10
1.8 Vehicle Tracing in India 10
Chapter 2: Block Diagram of VTS 12
2.1 Block Diagram of Vehicle Tracing Using GSM and GPS Modem
2.2 Hardware Components
2.2.1 GPS 13
iii
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
6/88
2.2.1.1 Working of GPS 13
2.2.1.2 Triangulation 14
2.2.1.3 Augmentation 14
2.2.2 GSM 15
2.2.3 RS232 Interface 16
2.2.3.1 The scope of the standard 16
2.2.3.2 History of RS 232 17
2.2.3.3 Limitation of Standard 18
2.2.3.4 Standard details 19
2.2.3.5 Connectors 21
2.2.3.6 Cables 24
2.2.3.7 Conventions 24
2.2.3.8 RTS/CTS handshaking 25
2.2.3.9 3-wire and 5-wire RS-232 26
2.2.3.10 Seldom used features 26
2.2.3.11 Timing Signals 27
2.2.3.12 Other Serial interfaces similar to RS-232 27
2.2.4 MAX232 IC 28
2.2.4.1 Voltage Levels 29
2.2.4.2 Pin Diagram 30
2.2.4.3 Pin Description 31
2.2.5 Relay 31
2.2.5.1 History of a Relay 32
2.2.5.2 Basic Design and Operation of a Relay 33
iv
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
7/88
2.2.5.3 Pole and Throw 34
2.2.5.4 Uses of Relays 35
2.2.6 LCD 35
2.2.6.1 Advantages and Disadvantages 36
Chapter 3: Working of VTS 37
3.1 Schematic Diagram of VTS 37
3.2 Circuit Description 37
3.3 Circuit Operation 38
3.3.1 Power 38
3.3.2 Serial Ports 38
3.4 Operating procedure 38
Chapter 4: Microcontroller AT 89S52 40
4.1 Features 40
4.2 The Pin Configuration 41
4.2.1 Special Function Registers (SFR) 42
4.3 Memory Organization 43
4.4 Watch Dog Timer 43
4.4.1 Watchdog Timer for both modes of operation 44
Chapter 5: GSM Module 46
5.1 GSM History 46
5.2 Services Provided by GSM 47
5.3 Mobile Station 48
5.4 Base Station Subsystem 50
5.4.1 Base Station Controller 51
v
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
8/88
5.5 Architecture of the GSM Network 52
5.6 Radio Link Aspects 53
5.7 Multiple Access and Channel Structure 54
5.8 Frequency Hopping 54
5.9 Discontinuous Reception 55
5.10 Power Control 55
5.11 Network Aspects 56
5.12 Radio Resources Management 57
5.13 Handover 57
5.14 Mobility Management 59
5.15 Location Updating 59
5.16 Authentication and Security 60
5.17 Communication Management 61
5.18 Call Routing 61
Chapter 6: GPS Receiver 63
6.1 GPS History 63
6.1.1 Working and Operation 64
6.2 GPS Data Decoding 65
Chapter 7: KEIL Software 67
7.1 Introduction 67
7.2 KEIL uVision2 66
7.3 KEIL Software Programing Procedure 67
7.3.1 Procedure Steps 67
7.4 Applications of KEIL Software 69
vi
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
9/88
Chapter 8: Applications 70
8.1 Applications 71
8.2 Limitations 72
Chapter 9: Result Analysis 73
Chapter 10: Conclusion and Future Scope 75
References 76
vii
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
10/88
List of Figures
Figure 1.1 Vehicle tracking system 2
Figure 2.1 Block diagram 12
Figure 2.2
A 25 pin connector as described in the RS-232 standard 16
Figure 2.3 Trace of voltage levels for uppercase ASCII "K" character 19
Figure 2.4 Upper Picture: RS232 signaling as seen when probed by an actual
oscilloscope
20
Figure 2.5 MAX232 chip 28
Figure 2.6 Pin diagram of MAX232 30
Figure 2.7
UK Q-style signaling relay and base. 32
Figure 2.8 Automotive-style miniature relay, dust cover is taken off 32
Figure 2.9 Circuit symbols of relays. 34
Figure 2.10 A general purpose alphanumeric LCD, with two lines of 16
characters.
35
Figure 3.1 Schematic diagram of vehicle tracing using GSM and GPS 37
Figure 5.1 Mobile station SIM port 49
Figure 5.2 Baste Station Subsystem. 50
Figure 5.3 Siemens BSC 51
Figure 5.4 Siemens’ TRAU 52
Figure 5.5 General architecture of a GSM network 53
Figure 5.6 Signaling protocol structure in GSM 57
Figure 5.7 Call routing for a mobile terminating call 61
Figure 6.1 G.P.S receiver communicating with the satellite 65
Figure 9.1 Picture of final VTS kit 73
Figure 9.2 Message received from the VTS kit 74
viii
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
11/88
List of Tables
Table 2.1 Commonly used RS-232 signals and pin assignments 22
Table 2.2
Pin assignments 23
Table 2.3 RS-232 Voltage Levels 29
Table 2.4 TX and RX pin connection 30
Table 2.5 Pins assignment of MAX232 30
ix
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
12/88
Abbreviations
VTS Vehicle Tracking System
GSM Global System for Mobile Communication
GPS Global Positioning System
RI Ring Indicator
Tx Transmitter
Rx Receiver
SFR Special Function Register
LCD Liquid Crystal Display
RAM Random Access Memory
ROM Read Only Memory
RS-232 Recommended Standard
TTL Transistor Transistor Logic
CMOS Complementary Metal Oxide Semi-Conductor
UART Universal Asynchronous Receiver Transmitter
RST Reset
ALE Address Latch Enable
PSEN Program Store Enable
WDT Watch Dog Timer
x
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
13/88
Chapter 1
Introduction to VTS
1.1 Introduction
Vehicle Tracking System (VTS) is the technology used to determine the location
of a vehicle using different methods like GPS and other radio navigation systems
operating through satellites and ground based stations. By following triangulation or
trilateration methods the tracking system enables to calculate easy and accurate location
of the vehicle. Vehicle information like location details, speed, distance traveled etc. can
be viewed on a digital mapping with the help of a software via Internet. Even data can be
stored and downloaded to a computer from the GPS unit at a base station and that can
later be used for analysis. This system is an important tool for tracking each vehicle at a
given period of time and now it is becoming increasingly popular for people having
expensive cars and hence as a theft prevention and retrieval device.
i.
The system consists of modern hardware and software components enabling one
to track their vehicle online or offline. Any vehicle tracking system consists of
mainly three parts mobile vehicle unit, fixed based station and, database and
software system.
ii.
Vehicle Unit: It is the hardware component attached to the vehicle having either a
GPS/GSM modem. The unit is configured around a primary modem that functions
with the tracking software by receiving signals from GPS satellites or radio station
points with the help of antenna. The controller modem converts the data and sends
the vehicle location data to the server.
iii. Fixed Based Station: Consists of a wireless network to receive and forward the
data to the data center. Base stations are equipped with tracking software and
geographic map useful for determining the vehicle location. Maps of every cityand landmarks are available in the based station that has an in-built Web Server.
iv. Database and Software: The position information or the coordinates of each
visiting points are stored in a database, which later can be viewed in a display
screen using digital maps. However, the users have to connect themselves to the
web server with the respective vehicle ID stored in the database and only then s/he
can view the location of vehicle traveled.
1
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
14/88
1.2 Vehicle Security using VTS
Vehicle Security is a primary concern for all vehicle owners. Owners as well as
researchers are always on the lookout for new and improved security systems for their
vehicles. One has to be thankful for the upcoming technologies, like GPS systems, whichenables the owner to closely monitor and track his vehicle in real-time and also check the
history of vehicles movements. This new technology, popularly called Vehicle Tracking
Systems has done wonders in maintaining the security of the vehicle tracking system is
one of the biggest technological advancements to track the activities of the vehicle. The
security system uses Global Positioning System GPS, to find the location of the
monitored or tracked vehicle and then uses satellite or radio systems to send to send the
coordinates and the location data to the monitoring center. At monitoring center various
software’s are used to plot the Vehicle on a map. In this way the Vehicle owners are able
to track their vehicle on a real-time basis. Due to real-time tracking facility, vehicle
tracking systems are becoming increasingly popular among owners of expensive vehicles.
Figure 1.1 Vehicle tracking system
The vehicle tracking hardware is fitted on to the vehicle. It is fitted in such a manner
that it is not visible to anyone who is outside the vehicle. Thus it operates as a covert unit
which continuously sends the location data to the monitoring unit.When the vehicle is stolen, the location data sent by tracking unit can be used to
find the location and coordinates can be sent to police for further action. Some Vehicle
tracking System can even detect unauthorized movements of the vehicle and then alert the
owner. This gives an edge over other pieces of technology for the same purpose
Monitoring center Software helps the vehicle owner with a view of the location at
which the vehicle stands. Browsing is easy and the owners can make use of any
browser and connect to the monitoring center software, to find and track his vehicle. This
2
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
15/88
in turn saves a lot of effort to find the vehicle's position by replacing the manual call to
the driver.
As we have seen the vehicle tracking system is an exciting piece of technology for
vehicle security. It enables the owner to virtually keep an eye on his vehicle any time and
from anywhere in the world.
A vehicle tracking system combines the installation of an electronic device in a
vehicle, or fleet of vehicles, with purpose-designed computer software at least at one
operational base to enable the owner or a third party to track the vehicle's location,
collecting data in the process from the field and deliver it to the base of operation.
Modern vehicle tracking systems commonly use GPS or GLONASS technology for
locating the vehicle, but other types of automatic vehicle location technology can also be
used. Vehicle information can be viewed on electronic maps via the Internet or
specialized software. Urban public transit authorities are an increasingly common user of
vehicle tracking systems, particularly in large cities.
Vehicle tracking systems are commonly used by fleet operators for fleet
management functions such as fleet tracking, routing, dispatch, on-board information and
security. Along with commercial fleet operators, urban transit agencies use the
technology for a number of purposes, including monitoring schedule adherence of buses
in service, triggering changes of buses' destination sign displays at the end of the line (or
other set location along a bus route), and triggering pre-recorded announcements for
passengers. The American Public Transportation Association estimated that, at the
beginning of 2009, around half of all transit buses in the United States were already using
a GPS-based vehicle tracking system to trigger automated stop announcements. This can
refer to external announcements (triggered by the opening of the bus's door) at a bus stop,
announcing the vehicle's route number and destination, primarily for the benefit
of visually impaired customers, or to internal announcements (to passengers already on
board) identifying the next stop, as the bus (or tram) approaches a stop, or both. Data
collected as a transit vehicle follows its route is often continuously fed into a computer
program which compares the vehicle's actual location and time with its schedule, and in
turn produces a frequently updating display for the driver, telling him/her how early or
late he/she is at any given time, potentially making it easier to adhere more closely to the
published schedule. Such programs are also used to provide customers with real-time
information as to the waiting time until arrival of the next bus or tram/streetcar at a given
stop, based on the nearest vehicles' actual progress at the time, rather than merely giving
3
http://en.wikipedia.org/wiki/Computer_softwarehttp://en.wikipedia.org/wiki/Global_Positioning_Systemhttp://en.wikipedia.org/wiki/GLONASShttp://en.wikipedia.org/wiki/Automatic_vehicle_locationhttp://en.wikipedia.org/wiki/Fleet_managementhttp://en.wikipedia.org/wiki/Fleet_managementhttp://en.wikipedia.org/wiki/Fleet_trackinghttp://en.wikipedia.org/wiki/Public_transporthttp://en.wikipedia.org/wiki/On-time_performancehttp://en.wikipedia.org/wiki/Destination_signhttp://en.wikipedia.org/wiki/American_Public_Transportation_Associationhttp://en.wikipedia.org/wiki/Visual_impairmenthttp://en.wikipedia.org/wiki/Tramhttp://en.wikipedia.org/wiki/Real-time_datahttp://en.wikipedia.org/wiki/Real-time_datahttp://en.wikipedia.org/wiki/Real-time_datahttp://en.wikipedia.org/wiki/Real-time_datahttp://en.wikipedia.org/wiki/Tramhttp://en.wikipedia.org/wiki/Visual_impairmenthttp://en.wikipedia.org/wiki/American_Public_Transportation_Associationhttp://en.wikipedia.org/wiki/Destination_signhttp://en.wikipedia.org/wiki/On-time_performancehttp://en.wikipedia.org/wiki/Public_transporthttp://en.wikipedia.org/wiki/Fleet_trackinghttp://en.wikipedia.org/wiki/Fleet_managementhttp://en.wikipedia.org/wiki/Fleet_managementhttp://en.wikipedia.org/wiki/Automatic_vehicle_locationhttp://en.wikipedia.org/wiki/GLONASShttp://en.wikipedia.org/wiki/Global_Positioning_Systemhttp://en.wikipedia.org/wiki/Computer_software
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
16/88
information as to the scheduled time of the next arrival. Transit systems providing this
kind of information assign a unique number to each stop, and waiting passengers can
obtain information by entering the stop number into an automated telephone system or an
application on the transit system's website. Some transit agencies provide a virtual map
on their website, with icons depicting the current locations of buses in service on each
route, for customers' information, while others provide such information only to
dispatchers or other employees.
Other applications include monitoring driving behavior, such as an employer of an
employee, or a parent with a teen driver.
Vehicle tracking systems are also popular in consumer vehicles as a theft prevention
and retrieval device. Police can simply follow the signal emitted by the tracking system
and locate the stolen vehicle. When used as a security system, a Vehicle Tracking System
may serve as either an addition to or replacement for a traditional car alarm. Some vehicle
tracking systems make it possible to control vehicle remotely, including block doors or
engine in case of emergency. The existence of vehicle tracking device then can be used to
reduce the insurance cost, because the loss-risk of the vehicle drops significantly.
Vehicle tracking systems are an integrated part of the "layered approach" to vehicle
protection, recommended by the National Insurance Crime Bureau (NICB) to
prevent motor vehicle theft. This approach recommends four layers of security based on
the risk factors pertaining to a specific vehicle. Vehicle Tracking Systems are one such
layer, and are described by the NICB as “very effective” in helping police recover stolen
vehicles.
Some vehicle tracking systems integrate several security systems, for example by
sending an automatic alert to a phone or email if an alarm is triggered or the vehicle is
moved without authorization, or when it leaves or enters a geofence.
1.3 Active versus Passive Tracking
Several types of vehicle tracking devices exist. Typically they are classified as
"passive" and "active". "Passive" devices store GPS location, speed, heading and
sometimes a trigger event such as key on/off, door open/closed. Once the vehicle returns
to a predetermined point, the device is removed and the data downloaded to a computer
for evaluation. Passive systems include auto download type that transfer data via wireless
download. "Active" devices also collect the same information but usually transmit the
4
http://en.wikipedia.org/wiki/Car_alarmhttp://en.wikipedia.org/wiki/National_Insurance_Crime_Bureauhttp://en.wikipedia.org/wiki/Motor_vehicle_thefthttp://en.wikipedia.org/wiki/Geofencehttp://en.wikipedia.org/wiki/Geofencehttp://en.wikipedia.org/wiki/Motor_vehicle_thefthttp://en.wikipedia.org/wiki/National_Insurance_Crime_Bureauhttp://en.wikipedia.org/wiki/Car_alarm
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
17/88
data in real-time via cellular or satellite networks to a computer or data center for
evaluation.
Many modern vehicle tracking devices combine both active and passive tracking
abilities: when a cellular network is available and a tracking device is connected it
transmits data to a server; when a network is not available the device stores data in
internal memory and will transmit stored data to the server later when the network
becomes available again.
Historically vehicle tracking has been accomplished by installing a box into the
vehicle, either self-powered with a battery or wired into the vehicle's power system. For
detailed vehicle locating and tracking this is still the predominant method; however, many
companies are increasingly interested in the emerging cell phone technologies that
provide tracking of multiple entities, such as both a salesperson and their vehicle. These
systems also offer tracking of calls, texts, and Web use and generally provide a wider
range of options.
1.4 Types of GPS Vehicle Tracking
There are three main types of GPS vehicle tracking, tracking based mobile, wireless
passive tracking and satellite in real-time GPS tracking. This article discusses the
advantages and disadvantages to all three types of GPS vehicle tracking circumference.
i) Mobile phone based tracking
The initial cost for the construction of the system is slightly lower than the other two
options. With a mobile phone-based tracking average price is about $ 500. A cell-
based monitoring system sends information about when a vehicle is every five minutes
during a rural network. The average monthly cost is about thirty-five dollars for airtime.
ii)
Wireless Passive Tracking
A big advantage that this type of tracking system is that there is no monthly fee, so
that when the system was introduced, there will be other costs associated with it. But
setting the scheme is a bit 'expensive. The average is about $ 700 for hardware and $ 800
for software and databases. With this type of system, most say that the disadvantage is
that information about where the vehicle is not only can exist when the vehicle is returned
to the base business. This is a great disadvantage, particularly for companies that are
looking for a monitoring system that tells them where their vehicle will be in case of theft
or an accident. However, many systems are now introducing wireless modems into their
5
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
18/88
devices so that tracking information can be without memory of the vehicle to be seen.
With a wireless modem that is wireless passive tracking systems are also able to gather
information on how fast the vehicle was traveling, stopping, and made other detailed
information. With this new addition, many companies believe that this system is perfect,
because there is no monthly bill.
iii) Via satellite in real time
This type of system provides less detailed information, but work at the national
level, making it a good choice for shipping and trucking companies. Spending on
construction of the system on average about $ 700. The monthly fees for this system vary
from five dollars for a hundred dollars, depending on how the implementation of a
reporting entity would be.
Technology
Over the next few years, GPS tracking will be able to provide businesses with a
number of other benefits. Some companies have already introduced a way for a customer
has signed the credit card and managed at local level through the device. Others are
creating ways for dispatcher to send the information re-routing, the GPS device directly to
a manager. Not a new requirement for GPS systems is that they will have access to the
Internet and store information about the vehicle as a driver or mechanic GPS device to
see the diagrams used to assist with the vehicle you want to leave. Beyond that all the
information be saved and stored in its database.
1.5 Typical Architecture
Major constituents of the GPS based tracking are
i. GPS tracking device
The device fits into the vehicle and captures the GPS location information apart
from other vehicle information at regular intervals to a central server. The other
vehicle information can include fuel amount, engine temperature, altitude, reverse
geocoding, door open/close, tire pressure, cut off fuel, turn off ignition, turn on
headlight, turn on taillight, battery status, GSM area code/cell code decoded,
number of GPS satellites in view, glass open/close, fuel amount, emergency
button status, cumulative idling, computed odometer, engine
RPM, throttle position, and a lot more. Capability of these devices actually
decides the final capability of the whole tracking system.
6
http://en.wikipedia.org/wiki/Reverse_geocodinghttp://en.wikipedia.org/wiki/Reverse_geocodinghttp://en.wikipedia.org/wiki/Odometerhttp://en.wikipedia.org/wiki/Throttlehttp://en.wikipedia.org/wiki/Throttlehttp://en.wikipedia.org/wiki/Odometerhttp://en.wikipedia.org/wiki/Reverse_geocodinghttp://en.wikipedia.org/wiki/Reverse_geocoding
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
19/88
ii. GPS tracking server
The tracking server has three responsibilities: receiving data from the GPS
tracking unit, securely storing it, and serving this information on demand to the
user.iii. User interface
The UI determines how one will be able to access information, view vehicle data,
and elicit important details from it.
1.6 History of Vehicle Tracking
GPS or Global Positioning Systems were designed by the United States Government
and military, which the design was intended to be used as surveillance. After several
years went by the government signed a treaty to allow civilians to buy GPS units also
only the civilians would get precise downgraded ratings.
Years after the Global Positioning Systems were developed the military controlled
the systems despite that civilians could still purchase them in stores. In addition, despite
that Europe has designed its own systems called the Galileo the US military still has
complete control.
GPS units are also called tracking devices that are quite costly still. As more of
these devices develop however the more affordable the GPS can be purchased. Despite of
the innovative technology and designs of the GPS today the devices has seen some
notable changes or reductions in pricing. Companies now have more access to these
devices and many of the companies can find benefits.
These days you can pay-as-you go or lease a GPS system for your company. This
means you do not have to worry about spending upfront money, which once stopped
companies from installing the Global positioning systems at one time.
Today’s GPS applications have vastly developed as well. It is possible to use the
Global Positioning Systems to design expense reports, create time sheets, or reduce the
costs of fuel consumption. You can also use the tracking devices to increase efficiency of
employee driving. The GPS unit allows you to create Geo-Fences about a designated
location, which gives you alerts once your driver(s) passes through. This means you have
added security combined with more powerful customer support for your workers.
Today’s GPS units are great tracking devices that help fleet managers stay in control
of their business. The applications in today’s GPS units make it possible to take full
7
http://en.wikipedia.org/wiki/GPS_tracking_serverhttp://en.wikipedia.org/wiki/GPS_tracking_serverhttp://en.wikipedia.org/wiki/GPS_tracking_unithttp://en.wikipedia.org/wiki/GPS_tracking_unithttp://en.wikipedia.org/wiki/GPS_tracking_unithttp://en.wikipedia.org/wiki/GPS_tracking_unithttp://en.wikipedia.org/wiki/GPS_tracking_server
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
20/88
control of your company. It is clear that the tracking devices offer many benefits to
companies, since you can build automated expense reports anytime.
GPS units do more than just allow companies to create reports. These devices also
help to put an end to thieves. According to recent reports, crime is at a high, which means
that car theft is increasing. If you have the right GPS unit, you can put an end to car thefts
because you can lock and unlock your car anytime you choose.
GPS are small tracking devices that are installed in your car and it will supply you
with feedback data from tracking software that loads from a satellite. This gives you more
control over your vehicles.
The chief reason for companies to install tracking devices is to monitor their mobile
workforce. A preventive measure device allows companies to monitor their employees’
activities. Company workers can no longer take your vehicles to unassigned locations.
They will not be able to get away with unauthorized activities at any time because you
can monitor their every action on a digital screen.
The phantom pixel is another thing some webmasters do to get better rankings.
Unfortunately it will backfire on you since the search engines do not want this to occur.
You see, the phantom pixel is when you might have a 1 pixel image or an image so small
it cannot be seen by the regular eye. They use the pixel to stuff it with keywords. The
search engine can view it in the code, which is how they know it is there and can give you
better rank for the keywords in theory. Of course since the search engines don’t like this
phantom pixel you are instead not getting anything for the extra keywords except sent to
the bottomless pit.
1.6.1 Early Technology
In the initial period of tracking only two radios were used to exchange the
information. One radio was attached to the vehicle while another at base station by which
drivers were enabled to talk to their masters. Fleet operator could identify the progress
through their routes.
The technology was not without its limits. It was restricted by the distance which
became a hurdle in accuracy and better connectivity between driver and fleet operators.
Base station was dependent on the driver for the information and a huge size fleet could
not have been managed depending on man-power only.
The scene of vehicle tracking underwent a change with the arrival of GPStechnology. This reduced the dependence on man-power. Most of the work of tracking
8
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
21/88
became electronic. Computers proved a great help in managing a large fleet of vehicle.
This also made the information authentic. As this technology was available at affordable
cost all whether small or big fleet could take benefit of this technology
Because of the cheap accessibility of the device computer tracking facilities has
come to stay and associated with enhanced management. Today each vehicle carries
tracking unit which is monitored from the base station. Base station receives the data
from the unit.
All these facilities require a heavy investment of capital for the installation of the
infrastructure of tracking system for monitoring and dispatching
1.6.2 New development in technology
New system costs less with increased efficiency. Presently it is small tracking unit
in the vehicle with web-based interface, connected through a mobile phone. This device
avoids unnecessary investment in infrastructure with the facility of monitoring from
anywhere for the fleet managers. This provides more efficient route plan to fleet operators
of all sizes and compositions saving money and time.
Vehicle tracking system heralded a new era of convenience and affordability in fleet
management. Thus due to its easy availability it is going to stay for long.
1.7 Vehicle Tracking System Features
Monitoring and managing the mobile assets are very important for any company
dealing with the services, delivery or transport vehicles. Information technologies help in
supporting these functionalities from remote locations and update the managers with the
latest information of their mobile assets. Tracking the mobile assets locations data and
analyzing the information is necessary for optimal utilization of the assets.
Vehicle Tracking System is a software & hardware system enabling the vehicleowner to track the position of their vehicle. A vehicle tracking system uses either GPS or
radio technology to automatically track and record a fleet's field activities. Activity is
recorded by modules attached to each vehicle. And then the data is transmitted to a
central, internet-connected computer where it is stored. Once the data is transmitted to the
computer, it can be analyzed and reports can be downloaded in real-time to your
computer using either web browser based tools or customized software.
9
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
22/88
1.7.1 Vehicle Tracking Benefits
An enterprise-level vehicle tracking system should offer customizable reporting
tools, for example to provide a summary of the any day activities. It should have the
ability to produce and print detailed maps and reports displaying actual stops, customerlocations, mileage traveled, and elapsed time at each location, and real-time access to
vehicle tracking data and reports. Vehicle tracking system can be active, passive or both
depending upon the application. Here are steps involved in the vehicle tracking:
i. Data capture: Data capturing is the first step in tacking your vehicle. Data in a
vehicle tracking system is captured through a unit called automated vehicle unit.
The automated vehicle unit uses the Global Positioning System (GPS) to
determine the location of the vehicle. This unit is installed in the vehicle and
contains interfaces to various data sources. This paper considers the location data
capture along with data from various sensors like fuel, vehicle diagnostic sensors
etc.
ii. Data storage: Captured data is stored in the memory of the automated vehicle
unit.
iii. Data transfer: Stored data are transferred to the computer server using the mobile
network or by connecting the vehicle mount unit to the computer.
iv. Data analysis: Data analysis is done through software application. A GIS
mapping component is also an integral part of the vehicle tracking system and it is
used to display the correct location of the vehicle on the map.
1.8 Vehicle Tracing in India
Vehicle tracking system in India is mainly used in transport industry that keeps a
real-time track of all vehicles in the fleet. The tracking system consists of GPS device that
brings together GPS and GSM technology using tracking software. The attached GPS unit
in the vehicle sends periodic updates of its location to the route station through the server
of the cellular network that can be displayed on a digital map. The location details are
later transferred to users via SMS, e-mail or other form of data transfers.
There are various GPS software and hardware developing companies in India
working for tracking solutions. However, its application is not that much of popular as in
other countries like USA, which regulates the whole GPS network. In India it is mostly
used in Indian transport and logistics industry and not much personal vehicle tracking.
10
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
23/88
But with better awareness and promotion the market will increase. Let’s have a look at its
current application in India using vehicle tracking though in less volume.
a)
Freight forwarding
Logistic service providers are now increasingly adopting vehicle-tracking systemfor better fleet management and timely service. The system can continuously monitor
shipment location and so can direct the drivers directly in case of any change of plan.
Fleet managers can keep an eye on all activities of workers, vehicle over speed, route
deviation etc. The driver in turn can access emergency service in case of sickness,
accident or vehicle breakdown. All in turn supports money and time management,
resulting better customer service.
b)
Call centersIn commercial vehicle segments the taxi operators of various call centers are now
using vehicle tracking system for better information access. However, its application is in
its infant stage in India and if adequate steps are taken in bringing the cost of hardware
and software low then it can be used for tracking personal vehicle, farming (tractor),
tourist buses, security and emergency vehicle etc. Again Government needs to cut down
the restriction imposed upon the availability of digital maps for commercial use and this
will encourage software industry in developing cost-effective tracking solutions. Though,
sales of both commercial and passenger vehicles are growing but price of tracking service
is very high and this is the key issue in Indian market. Hence, it’s important for market
participants to reduce prices of GPS chips and other products in order to attract more and
more users.
As far as Indian vehicle tracking and navigation market is concerned the recent
association of India with Russian Global Navigation Satellite System (GLONASS) will
act as a catalyst in the improvement of vehicle tracking system. This will give an
advantage in managing traffic, roadways and ports and also as an important tool for
police and security agency to track stolen vehicles. Hence, in near future there is large
prospect for the utility of vehicle tracking system in India, which can revolutionize the
way we are communicating.
11
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
24/88
Chapter 2
Block Diagram of VTS
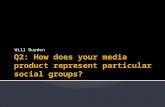
2.1 Block Diagram of Vehicle Tracing Using GSM and GPS Modem
Figure 2.1 Block diagram
2.2 Hardware Components
AT89S52
GPS MODULE
GSM MODULE
RS232
MAX 232
RELAY
LCD
In this project AT89S52 microcontroller is used for interfacing to various hardware
peripherals. The current design is an embedded application, which will continuously
monitor a moving Vehicle and report the status of the Vehicle on demand. For doing so
an AT89S52 microcontroller is interfaced serially to a GSM Modem and GPS Receiver.
A GSM modem is used to send the position (Latitude and Longitude) of the vehicle froma remote place. The GPS modem will continuously give the data i.e. the latitude and
longitude indicating the position of the vehicle. The GPS modem gives many parameters
as the output, but only the NMEA data coming out is read and displayed on to the LCD.
The same data is sent to the mobile at the other end from where the position of the vehicle
is demanded. An EEPROM is used to store the mobile number.
The hardware interfaces to microcontroller are LCD display, GSM modem and GPS
Receiver. The design uses RS-232 protocol for serial communication between the
modems and the microcontroller. A serial driver IC is used for converting TTL voltage
12
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
25/88
levels to RS-232 voltage levels. When the request by user is sent to the number at the
modem, the system automatically sends a return reply to that mobile indicating the
position of the vehicle in terms of latitude and longitude.
As the Micro Controller, GPS and GSM take a sight of in depth knowledge, they are
explained in the next chapters.
2.2.1 GPS
GPS, in full Global Positioning System, space-based radio-navigation system that
broadcasts highly accurate navigation pulses to users on or near the Earth. In the United
States’ Navstar GPS, 24 main satellites in 6 orbits circle the Earth every 12 hours. In
addition, Russia maintains a constellation called GLONASS (Global Navigation Satellite
System).
2.2.1.1 Working of GPS
GPS receiver works on 9600 baud rate is used to receive the data from space
Segment (from Satellites), the GPS values of different Satellites are sent to
microcontroller AT89S52, where these are processed and forwarded to GSM. At the time
of processing GPS receives only $GPRMC values only. From these values
microcontroller takes only latitude and longitude values excluding time, altitude, name of
the satellite, authentication etc. E.g. LAT: 1728:2470 LOG: 7843.3089 GSM modem with
a baud rate 57600.
A GPS receiver operated by a user on Earth measures the time it takes radio signals
to travel from four or more satellites to its location, calculates the distance to each
satellite, and from this calculation determines the user’s longitude, latitude, and altitude.
The U.S. Department of Defense originally developed the Navstar constellation for
military use, but a less precise form of the service is available free of charge to civilianusers around the globe. The basic civilian service will locate a receiver within 10 meters
(33 feet) of its true location, though various augmentation techniques can be used to
pinpoint the location within less than 1 cm (0.4 inch). With such accuracy and the
ubiquity of the service, GPS has evolved far beyond its original military purpose and has
created a revolution in personal and commercial navigation. Battlefield missiles and
artillery projectiles use GPS signals to determine their positions and velocities, but so do
the U.S. space shuttle and the International Space Station as well as commercial jetliners
and private airplanes. Ambulance fleets, family automobiles, and railroad locomotives
13
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
26/88
benefit from GPS positioning, which also serves farm tractors, ocean liners, hikers, and
even golfers. Many GPS receivers are no larger than a pocket calculator and are powered
by disposable batteries, while GPS computer chips the size of a baby’s fingernail have
been installed in wristwatches, cellular telephones, and personal digital assistants.
2.2.1.2 Triangulation
The principle behind the unprecedented navigational capabilities of GPS is
triangulation. To triangulate, a GPS receiver precisely measures the time it takes for a
satellite signal to make its brief journey to Earth—less than a tenth of a second. Then it
multiplies that time by the speed of a radio wave—300,000 km (186,000 miles) per
second—to obtain the corresponding distance between it and the satellite. This puts the
receiver somewhere on the surface of an imaginary sphere with a radius equal to itsdistance from the satellite. When signals from three other satellites are similarly
processed, the receiver’s built-in computer calculates the point at which all four spheres
intersect, effectively determining the user’s current longitude, latitude, and altitude. (In
theory, three satellites would normally provide an unambiguous three-dimensional fix,
but in practice at least four are used to offset inaccuracy in the receiver’s clock.) In
addition, the receiver calculates current velocity (speed and direction) by measuring the
instantaneous Doppler effect shifts created by the combined motion of the same four
satellites.
2.2.1.3 Augmentation
Although the travel time of a satellite signal to Earth is only a fraction of a second,
much can happen to it in that interval. For example, electrically charged particles in the
ionosphere and density variations in the troposphere may act to slow and distort satellite
signals. These influences can translate into positional errors for GPS users—a problem
that can be compounded by timing errors in GPS receiver clocks. Further errors may be
introduced by relativistic time dilations, a phenomenon in which a satellite’s clock and a
receiver’s clock, located in different gravitational fields and traveling at different
velocities, tick at different rates. Finally, the single greatest source of error to users of the
Navstar system is the lower accuracy of the civilian C/A-code pulse. However, various
augmentation methods exist for improving the accuracy of both the military and the
civilian systems.
14
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
27/88
When positional information is required with pinpoint precision, users can take
advantage of differential GPS techniques. Differential navigation employs a stationary
“base station” that sits at a known position on the ground and continuously monitors the
signals being broadcast by GPS satellites in its view. It then computes and broadcasts
real-time navigation corrections to nearby roving receivers. Each roving receiver, in
effect, subtracts its position solution from the base station’s solution, thus eliminating any
statistical errors common to the two. The U.S. Coast Guard maintains a network of such
base stations and transmits corrections over radio beacons covering most of the United
States. Other differential corrections are encoded within the normal broadcasts of
commercial radio stations. Farmers receiving these broadcasts have been able to direct
their field equipment with great accuracy, making precision farming a common term in
agriculture.
Another GPS augmentation technique uses the carrier waves that convey the
satellites’ navigation pulses to Earth. Because the length of the carrier wave is more than
1,000 times shorter than the basic navigation pulses, this “carrier-aided” approach, under
the right circumstances, can reduce navigation errors to less than 1 cm (0.4 inch). The
dramatically improved accuracy stems primarily from the shorter length and much greater
numbers of carrier waves impinging on the receiver’s antenna each second.
Yet another augmentation technique is known as geosynchronous overlays.
Geosynchronous overlays employ GPS payloads “piggybacked” aboard commercial
communication satellites that are placed in geostationary orbit some 35,000 km (22,000
miles) above the Earth. These relatively small payloads broadcast civilian C/A-code pulse
trains to ground-based users. The U.S. government is enlarging the Navstar constellation
with geosynchronous overlays to achieve improved coverage, accuracy, and survivability.
Both the European Union and Japan are installing their own geosynchronous overlays.
2.2.2 GSM
GSM (or Global System for Mobile Communications) was developed in 1990. The
first GSM operator has subscribers in 1991, the beginning of 1994 the network based on
the standard, already had 1.3 million subscribers, and the end of 1995 their number had
increased to 10 million!
There were first generation mobile phones in the 70's, there are 2nd generation
mobile phones in the 80's and 90's, and now there are 3rd gen phones which are about to
15
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
28/88
enter the Indian market. GSM is called a 2nd generation, or 2G communications
technology.
In this project it acts as a SMS Receiver and SMS sender. The GSM technical
specifications define the different entities that form the GSM network by defining their
functions and interface requirements.
2.2.3 RS232 Interface
In telecommunications, RS-232 is the traditional name for a series of standards
for serial binary single-ended data and control signals connecting between a DTE (Data
Terminal Equipment) and a DCE (Data Circuit-terminating Equipment). It is commonly
used in computer serial ports. The standard defines the electrical characteristics and
timing of signals, the meaning of signals, and the physical size and pin out of connectors.
The current version of the standard is TIA-232-F Interface between Data Terminal
Equipment and Data Circuit-Terminating Equipment Employing Serial Binary Data
Interchange, issued in 1997.
An RS-232 port was once a standard feature of a personal computer for connections
to modems, printers, mice, data storage, un-interruptible power supplies, and other
peripheral devices. However, the limited transmission speed, relatively large voltage
swing, and large standard connectors motivated development of the universal serial
bus which has displaced RS-232 from most of its peripheral interface roles. Many modern
personal computers have no RS-232 ports and must use an external converter to connect
to older peripherals. Some RS-232 devices are still found especially in industrial
machines or scientific instruments.
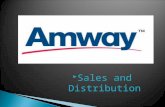
Figure 2.2: 25 pin connector as described in the RS-232 standard
2.2.3.1 The scope of the standard
The Electronic Industries Association (EIA) standard RS-232-C[1] as of 1969
defines:
Electrical signal characteristics such as voltage levels, signaling rate, timing
and slew-rate of signals, voltage withstand level, short-circuit behavior, and
maximum load capacitance.
Interface mechanical characteristics, pluggable connectors and pin identification.
16
http://en.wikipedia.org/wiki/Telecommunicationshttp://en.wikipedia.org/wiki/Serial_communicationhttp://en.wikipedia.org/wiki/Single-ended_signalinghttp://en.wikipedia.org/wiki/Data_transmissionhttp://en.wikipedia.org/wiki/Signaling_(telecommunications)http://en.wikipedia.org/wiki/Data_Terminal_Equipmenthttp://en.wikipedia.org/wiki/Data_Terminal_Equipmenthttp://en.wikipedia.org/wiki/Data_circuit-terminating_equipmenthttp://en.wikipedia.org/wiki/Computerhttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Printer_(computing)http://en.wikipedia.org/wiki/Mouse_(computing)http://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/Electronic_Industries_Alliancehttp://en.wikipedia.org/wiki/RS-232%23cite_note-eia-0http://en.wikipedia.org/wiki/RS-232%23cite_note-eia-0http://en.wikipedia.org/wiki/Data_signaling_ratehttp://en.wikipedia.org/wiki/Slew_ratehttp://en.wikipedia.org/wiki/Short_circuithttp://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Short_circuithttp://en.wikipedia.org/wiki/Slew_ratehttp://en.wikipedia.org/wiki/Data_signaling_ratehttp://en.wikipedia.org/wiki/RS-232%23cite_note-eia-0http://en.wikipedia.org/wiki/Electronic_Industries_Alliancehttp://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/Mouse_(computing)http://en.wikipedia.org/wiki/Printer_(computing)http://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Computerhttp://en.wikipedia.org/wiki/Data_circuit-terminating_equipmenthttp://en.wikipedia.org/wiki/Data_Terminal_Equipmenthttp://en.wikipedia.org/wiki/Data_Terminal_Equipmenthttp://en.wikipedia.org/wiki/Signaling_(telecommunications)http://en.wikipedia.org/wiki/Data_transmissionhttp://en.wikipedia.org/wiki/Single-ended_signalinghttp://en.wikipedia.org/wiki/Serial_communicationhttp://en.wikipedia.org/wiki/Telecommunications
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
29/88
Functions of each circuit in the interface connector.
Standard subsets of interface circuits for selected telecom applications.
The standard does not define such elements as the character encoding or the framing
of characters, or error detection protocols. The standard does not define bit rates for
transmission, except that it says it is intended for bit rates lower than 20,000 bits per
second. Many modern devices support speeds of 115,200 bit/s and above. RS 232 makes
no provision for power to peripheral devices.
Details of character format and transmission bit rate are controlled by the serial
port hardware, often a single integrated circuit called a UART that converts data from
parallel to asynchronous start-stop serial form. Details of voltage levels, slew rate, and
short-circuit behavior are typically controlled by a line driver that converts from the
UART's logic levels to RS-232 compatible signal levels, and a receiver that converts from
RS-232 compatible signal levels to the UART's logic levels.
2.2.3.2 History of RS 232
RS-232 was first introduced in 1962. The original DTEs were
electromechanical teletypewriters, and the original DCEs were (usually) modems.
When electronic terminals (smart and dumb) began to be used, they were often designed
to be interchangeable with teletypewriters, and so supported RS-232. The C revision of
the standard was issued in 1969 in part to accommodate the electrical characteristics of
these devices.
Since application to devices such as computers, printers, test instruments, and so on
was not considered by the standard, designers implementing an RS-232 compatible
interface on their equipment often interpreted the requirements idiosyncratically.
Common problems were non-standard pin assignment of circuits on connectors, and
incorrect or missing control signals. The lack of adherence to the standards produced a
thriving industry of breakout boxes, patch boxes, test equipment, books, and other aids
for the connection of disparate equipment. A common deviation from the standard was to
drive the signals at a reduced voltage. Some manufacturers therefore built transmitters
that supplied +5 V and -5 V and labeled them as "RS-232 compatible".
Later personal computers (and other devices) started to make use of the standard so
that they could connect to existing equipment. For many years, an RS-232-compatible port was a standard feature for serial communications, such as modem connections, on
17
http://en.wikipedia.org/wiki/Character_encodinghttp://en.wikipedia.org/wiki/Bit_ratehttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Integrated_circuithttp://en.wikipedia.org/wiki/UARThttp://en.wikipedia.org/wiki/Asynchronous_start-stophttp://en.wikipedia.org/wiki/Line_driverhttp://en.wikipedia.org/wiki/Logic_levelhttp://en.wikipedia.org/wiki/Teleprinterhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Computer_terminalhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Serial_communicationhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Serial_communicationhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Computer_terminalhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Teleprinterhttp://en.wikipedia.org/wiki/Logic_levelhttp://en.wikipedia.org/wiki/Line_driverhttp://en.wikipedia.org/wiki/Asynchronous_start-stophttp://en.wikipedia.org/wiki/UARThttp://en.wikipedia.org/wiki/Integrated_circuithttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Bit_ratehttp://en.wikipedia.org/wiki/Character_encoding
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
30/88
many computers. It remained in widespread use into the late 1990s. In personal computer
peripherals, it has largely been supplanted by other interface standards, such as USB. RS-
232 is still used to connect older designs of peripherals, industrial equipment (such
as PLCs), console ports, and special purpose equipment, such as a cash drawer for a cash
register.
The standard has been renamed several times during its history as the sponsoring
organization changed its name, and has been variously known as EIA RS-232, EIA 232,
and most recently as TIA 232. The standard continued to be revised and updated by
the Electronic Industries Alliance and since 1988 by the Telecommunications Industry
Association (TIA).[3] Revision C was issued in a document dated August 1969. Revision
D was issued in 1986. The current revision is TIA-232-F Interface between Data
Terminal Equipment and Data Circuit-Terminating Equipment Employing Serial Binary
Data Interchange, issued in 1997. Changes since Revision C have been in timing and
details intended to improve harmonization with the CCITT standard V.24, but equipment
built to the current standard will interoperate with older versions.
Related ITU-T standards include V.24 (circuit identification) and V.28 (signal
voltage and timing characteristics).
2.2.3.3 Limitation of Standard
Because the application of RS-232 has extended far beyond the original purpose of
interconnecting a terminal with a modem, successor standards have been developed to
address the limitations.
Issues with the RS-232 standard include:
The large voltage swings and requirement for positive and negative supplies
increases power consumption of the interface and complicates power supply design.
The voltage swing requirement also limits the upper speed of a compatible interface.
Single-ended signaling referred to a common signal ground limits the noise
immunity and transmission distance.
Multi-drop connection among more than two devices is not defined. While multi-
drop "work-arounds" have been devised, they have limitations in speed and
compatibility.
Asymmetrical definitions of the two ends of the link make the assignment of the
role of a newly developed device problematic; the designer must decide on either aDTE-like or DCE-like interface and which connector pin assignments to use.
18
http://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/System_consolehttp://en.wikipedia.org/wiki/Electronic_Industries_Alliancehttp://en.wikipedia.org/wiki/Telecommunications_Industry_Associationhttp://en.wikipedia.org/wiki/Telecommunications_Industry_Associationhttp://en.wikipedia.org/wiki/RS-232%23cite_note-2http://en.wikipedia.org/wiki/RS-232%23cite_note-2http://en.wikipedia.org/wiki/RS-232%23cite_note-2http://en.wikipedia.org/wiki/ITU-Thttp://en.wikipedia.org/wiki/ITU-Thttp://en.wikipedia.org/wiki/ITU-Thttp://en.wikipedia.org/wiki/ITU-Thttp://en.wikipedia.org/wiki/RS-232%23cite_note-2http://en.wikipedia.org/wiki/Telecommunications_Industry_Associationhttp://en.wikipedia.org/wiki/Telecommunications_Industry_Associationhttp://en.wikipedia.org/wiki/Electronic_Industries_Alliancehttp://en.wikipedia.org/wiki/System_consolehttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/USB
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
31/88
The handshaking and control lines of the interface are intended for the setup and
takedown of a dial-up communication circuit; in particular, the use of handshake
lines for flow control is not reliably implemented in many devices.
No method is specified for sending power to a device. While a small amount of
current can be extracted from the DTR and RTS lines, this is only suitable for low
power devices such as mice.
The 25-way connector recommended in the standard is large compared to current
practice.
2.2.3.4 Standard details
In RS-232, user data is sent as a time-series of bits. Both synchronous and
asynchronous transmissions are supported by the standard. In addition to the data circuits,
the standard defines a number of control circuits used to manage the connection between
the DTE and DCE. Each data or control circuit only operates in one direction, that is,
signaling from a DTE to the attached DCE or the reverse. Since transmit data and receive
data are separate circuits, the interface can operate in a full duplex manner, supporting
concurrent data flow in both directions. The standard does not define character framing
within the data stream, or character encoding.
Voltage levels
Figure 2.3 Diagrammatic oscilloscope trace of voltage levels for an uppercase ASCII "K" character (0x4b)
with 1 start bit, 8 data bits, 1 stop bit.
This is typical for start-stop communications, but the standard does not dictate a character
format or bit order.
The RS-232 standard defines the voltage levels that correspond to logical one and logical
zero levels for the data transmission and the control signal lines. Valid signals are plus or
minus 3 to 15 volts; the ±3 V range near zero volts is not a valid RS-232 level.
19
http://en.wikipedia.org/wiki/Handshakinghttp://en.wikipedia.org/wiki/Dial-uphttp://en.wikipedia.org/wiki/Flow_controlhttp://en.wikipedia.org/wiki/Mouse_(computing)http://en.wikipedia.org/wiki/Time-serieshttp://en.wikipedia.org/wiki/Bithttp://en.wikipedia.org/wiki/Full_duplexhttp://en.wikipedia.org/wiki/File:Rs232_oscilloscope_trace.svghttp://en.wikipedia.org/wiki/File:Rs232_oscilloscope_trace.svghttp://en.wikipedia.org/wiki/Full_duplexhttp://en.wikipedia.org/wiki/Bithttp://en.wikipedia.org/wiki/Time-serieshttp://en.wikipedia.org/wiki/Mouse_(computing)http://en.wikipedia.org/wiki/Flow_controlhttp://en.wikipedia.org/wiki/Dial-uphttp://en.wikipedia.org/wiki/Handshaking
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
32/88
Figure 2.4 Upper Picture: RS232 signaling as seen when probed by an actual oscilloscope (Tektronix
MSO4104B) for an uppercase ASCII "K" character (0x4b) with 1 start bit (always), 8 data bits, 1 stop bit
and no parity bits (8N1)
The standard specifies a maximum open-circuit voltage of 25 volts: signal levels of
±5 V, ±10 V, ±12 V, and ±15 V are all commonly seen depending on the power
supplies available within a device. RS-232 drivers and receivers must be able to withstand
indefinite short circuit to ground or to any voltage level up to ±25 volts. The slew rate, or
how fast the signal changes between levels, is also controlled.
For data transmission lines (TxD, RxD and their secondary channel equivalents)
logic one is defined as a negative voltage, the signal condition is called marking, and has
the functional significance. Logic zero is positive and the signal condition is termed
spacing. Control signals are logically inverted with respect to what one sees on the data
transmission lines. When one of these signals is active, the voltage on the line will be
between +3 to +15 volts. The inactive state for these signals is the opposite voltage
condition, between −3 and −15 volts. Examples of control lines include request to send
(RTS), clear to send (CTS), data terminal ready (DTR), and data set ready (DSR).
Because the voltage levels are higher than logic levels typically used by integrated
circuits, special intervening driver circuits are required to translate logic levels. These
also protect the device's internal circuitry from short circuits or transients that may appear
on the RS-232 interface, and provide sufficient current to comply with the slew rate
requirements for data transmission.
Because both ends of the RS-232 circuit depend on the ground pin being zero volts,
problems will occur when connecting machinery and computers where the voltage
between the ground pin on one end and the ground pin on the other is not zero. This may
also cause a hazardous ground loop. Use of a common ground limits RS-232 toapplications with relatively short cables. If the two devices are far enough apart or on
20
http://en.wikipedia.org/wiki/File:RS232-UART_Oscilloscope_Screenshot.pnghttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Slew_ratehttp://en.wikipedia.org/wiki/Data_terminal_readyhttp://en.wikipedia.org/wiki/Ground_loop_(electricity)http://en.wikipedia.org/wiki/File:RS232-UART_Oscilloscope_Screenshot.pnghttp://en.wikipedia.org/wiki/Ground_loop_(electricity)http://en.wikipedia.org/wiki/Data_terminal_readyhttp://en.wikipedia.org/wiki/Slew_ratehttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/File:RS232-UART_Oscilloscope_Screenshot.png
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
33/88
separate power systems, the local ground connections at either end of the cable will have
differing voltages; this difference will reduce the noise margin of the signals. Balanced,
differential, serial connections such as USB, RS-422 and RS-485 can tolerate larger
ground voltage differences because of the differential signaling.
Unused interface signals terminated to ground will have an undefined logic state.
Where it is necessary to permanently set a control signal to a defined state, it must be
connected to a voltage source that asserts the logic 1 or logic 0 level. Some devices
provide test voltages on their interface connectors for this purpose.
2.2.3.5 Connectors
RS-232 devices may be classified as Data Terminal Equipment (DTE) or Data
Communication Equipment (DCE); this defines at each device which wires will be
sending and receiving each signal. The standard recommended but did not make
mandatory the D-subminiature 25 pin connector. In general and according to the standard,
terminals and computers have male connectors with DTE pin functions, and modems
have female connectors with DCE pin functions. Other devices may have any
combination of connector gender and pin definitions. Many terminals were manufactured
with female terminals but were sold with a cable with male connectors at each end; the
terminal with its cable satisfied the recommendations in the standard.
Presence of a 25 pin D-sub connector does not necessarily indicate an RS-232-C
compliant interface. For example, on the original IBM PC, a male D-sub was an RS-232-
C DTE port (with a non-standard current loop interface on reserved pins), but the female
D-sub connector was used for a parallel Centronics printer port. Some personal
computers put non-standard voltages or signals on some pins of their serial ports.The
standard specifies 20 different signal connections. Since most devices use only a few
signals, smaller connectors can often be used.
The following table lists commonly used RS-232 signals and pin assignments.
The signals are named from the standpoint of the DTE. The ground signal is a
common return for the other connections. The DB-25 connector includes a second
"protective ground" on pin 1.
Data can be sent over a secondary channel (when implemented by the DTE and
DCE devices), which is equivalent to the primary channel. Pin assignments are described
in shown in Table 2.2:
21
http://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/RS-422http://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/D-subminiaturehttp://en.wikipedia.org/wiki/Current_loophttp://en.wikipedia.org/wiki/Centronicshttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Single-ended_signallinghttp://en.wikipedia.org/wiki/Single-ended_signallinghttp://en.wikipedia.org/wiki/Single-ended_signallinghttp://en.wikipedia.org/wiki/Single-ended_signallinghttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Centronicshttp://en.wikipedia.org/wiki/Current_loophttp://en.wikipedia.org/wiki/D-subminiaturehttp://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/RS-422http://en.wikipedia.org/wiki/USB
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
34/88
Table 2.1. Commonly used RS-232 signals and pin assignments
Signal Origin
DB-25 pin
Name Typical purpose Abbreviation DTE DCE
Data
Terminal Ready
Indicates presence of
DTE to DCE.DTR ● 20
Data
Carrier Detect
DCE is connected to the
telephone line.DCD ● 8
Data Set Ready
DCE is ready to receive
commands or data. DSR ● 6
Ring Indicator
DCE has detected an
incoming ring signal on
the telephone line.
RI ● 22
Request To
Send
DTE requests the DCE
prepare to receive data.RTS ● 4
Clear To SendIndicates DCE is ready to
accept data.CTS ● 5
Transmitted
Data
Carries data from DTE to
DCE.TxD ● 2
Received DataCarries data from DCE to
DTE.RxD ● 3
Common
GroundGND common 7
Protective
GroundPG common 1
22
http://en.wikipedia.org/wiki/D-subminiaturehttp://en.wikipedia.org/wiki/Data_Terminal_Readyhttp://en.wikipedia.org/wiki/Data_Terminal_Readyhttp://en.wikipedia.org/wiki/Data_Carrier_Detecthttp://en.wikipedia.org/wiki/Data_Carrier_Detecthttp://en.wikipedia.org/wiki/Data_Carrier_Detecthttp://en.wikipedia.org/wiki/Data_Carrier_Detecthttp://en.wikipedia.org/wiki/Data_Terminal_Readyhttp://en.wikipedia.org/wiki/Data_Terminal_Readyhttp://en.wikipedia.org/wiki/D-subminiature
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
35/88
Table 2.2 Pin assignments
Signal Pin
Common Ground 7 (same as primary)
Secondary Transmitted Data (STD) 14
Secondary Received Data (SRD) 16
Secondary Request To Send (SRTS) 19
Secondary Clear To Send (SCTS) 13
Secondary Carrier Detect (SDCD) 12
Ring Indicator' (RI), is a signal sent from the modem to the terminal device. It
indicates to the terminal device that the phone line is ringing. In many computer serial
ports, a hardware interrupt is generated when the RI signal changes state. Having support
for this hardware interrupt means that a program or operating system can be informed of a
change in state of the RI pin, without requiring the software to constantly "poll" the state
of the pin. RI is a one-way signal from the modem to the terminal (or more generally, the
DCE to the DTE) that does not correspond to another signal that carries similar
information the opposite way.
On an external modem the status of the Ring Indicator pin is often coupled to the
"AA" (auto answer) light, which flashes if the RI signal has detected a ring. The asserted
RI signal follows the ringing pattern closely, which can permit software to
detect distinctive ring patterns.
The Ring Indicator signal is used by some older uninterruptible power
supplies (UPS's) to signal a power failure state to the computer.
Certain personal computers can be configured for wake-on-ring, allowing a
computer that is suspended to answer a phone call.
2.2.3.6 Cables
The standard does not define a maximum cable length but instead defines the
maximum capacitance that a compliant drive circuit must tolerate. A widely used rule of
thumb indicates that cables more than 50 feet (15 m) long will have too much
capacitance, unless special cables are used. By using low-capacitance cables, full speed
23
http://en.wikipedia.org/wiki/Hardware_interrupthttp://en.wikipedia.org/wiki/Distinctive_ringhttp://en.wikipedia.org/wiki/Uninterruptible_power_supplyhttp://en.wikipedia.org/wiki/Uninterruptible_power_supplyhttp://en.wikipedia.org/wiki/Wake-on-ringhttp://en.wikipedia.org/wiki/Wake-on-ringhttp://en.wikipedia.org/wiki/Uninterruptible_power_supplyhttp://en.wikipedia.org/wiki/Uninterruptible_power_supplyhttp://en.wikipedia.org/wiki/Distinctive_ringhttp://en.wikipedia.org/wiki/Hardware_interrupt
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
36/88
communication can be maintained over larger distances up to about 1,000 feet
(300 m).[8] For longer distances, other signal standards are better suited to maintain high
speed.
Since the standard definitions are not always correctly applied, it is often necessary
to consult documentation, test connections with a breakout box, or use trial and error to
find a cable that works when interconnecting two devices. Connecting a fully standard-
compliant DCE device and DTE device would use a cable that connects identical pin
numbers in each connector (a so-called "straight cable"). "Gender changers" are available
to solve gender mismatches between cables and connectors. Connecting devices with
different types of connectors requires a cable that connects the corresponding pins
according to the table above. Cables with 9 pins on one end and 25 on the other are
common. Manufacturers of equipment with 8P8C connectors usually provide a cable with
either a DB-25 or DE-9 connector (or sometimes interchangeable connectors so they can
work with multiple devices). Poor-quality cables can cause false signals
by crosstalk between data and control lines (such as Ring Indicator). If a given cable will
not allow a data connection, especially if a Gender changer is in use, a Null modem may
be necessary.
2.2.3.7 Conventions
For functional communication through a serial port interface, conventions of bit
rate, character framing, communications protocol, character encoding, data compression,
and error detection, not defined in RS 232, must be agreed to by both sending and
receiving equipment. For example, consider the serial ports of the original IBM PC. This
implementation used an 8250 UART using asynchronous start-stop character formatting
with 7 or 8 data bits per frame, usually ASCII character coding, and data rates
programmable between 75 bits per second and 115,200 bits per second. Data rates above
20,000 bits per second are out of the scope of the standard, although higher data rates are
sometimes used by commercially manufactured equipment. Since most RS-232 devices
do not have automatic baud rate detection, users must manually set the baud rate (and all
other parameters) at both ends of the RS-232 connection.
In the particular case of the IBM PC, as with most UART chips including the 8250
UART used by the IBM PC, baud rates were programmable with arbitrary values. Thisallowed a PC to be connected to devices not using the rates typically used with modems.
24
http://en.wikipedia.org/wiki/RS-232%23cite_note-7http://en.wikipedia.org/wiki/RS-232%23cite_note-7http://en.wikipedia.org/wiki/RS-232%23cite_note-7http://en.wikipedia.org/wiki/Breakout_boxhttp://en.wikipedia.org/wiki/Gender_changerhttp://en.wikipedia.org/wiki/8P8Chttp://en.wikipedia.org/wiki/Crosstalkhttp://en.wikipedia.org/wiki/Ring_Indicatorhttp://en.wikipedia.org/wiki/Gender_changerhttp://en.wikipedia.org/wiki/Null_modemhttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/IBM_PChttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/Asynchronous_start-stophttp://en.wikipedia.org/wiki/ASCIIhttp://en.wikipedia.org/wiki/Automatic_baud_rate_detectionhttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/Modemhttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/Automatic_baud_rate_detectionhttp://en.wikipedia.org/wiki/ASCIIhttp://en.wikipedia.org/wiki/Asynchronous_start-stophttp://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/IBM_PChttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Null_modemhttp://en.wikipedia.org/wiki/Gender_changerhttp://en.wikipedia.org/wiki/Ring_Indicatorhttp://en.wikipedia.org/wiki/Crosstalkhttp://en.wikipedia.org/wiki/8P8Chttp://en.wikipedia.org/wiki/Gender_changerhttp://en.wikipedia.org/wiki/Breakout_boxhttp://en.wikipedia.org/wiki/RS-232%23cite_note-7
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
37/88
Not all baud rates can be programmed, due to the clock frequency of the 8250 UART in
the PC, and the granularity of the baud rate setting. This includes the baud rate of MIDI,
31,250 bits per second, which is generally not achievable by a standard IBM PC serial
port. MIDI-to-RS-232 interfaces designed for the IBM PC include baud rate translation
hardware to adjust the baud rate of the MIDI data to something that the IBM PC can
support, for example 19,200 or 38,400 bits per second.
2.2.3.8 RTS/CTS handshaking
In older versions of the specification, RS-232's use of the RTS and CTS lines is
asymmetric: The DTE asserts RTS to indicate a desire to transmit to the DCE, and the
DCE asserts CTS in response to grant permission. This allows for half-duplex modems
that disable their transmitters when not required, and must transmit a synchronization
preamble to the receiver when they are re-enabled. This scheme is also employed on
present-day RS-232 to RS-485 converters, where the RS-232's RTS signal is used to ask
the converter to take control of the RS-485 bus - a concept that does not otherwise exist in
RS-232. There is no way for the DTE to indicate that it is unable to accept data from the
DCE.
A non-standard symmetric alternative, commonly called "RTS/CTS handshaking,"
was developed by various equipment manufacturers. In this scheme, CTS is no longer a
response to RTS; instead, CTS indicates permission from the DCE for the DTE to send
data to the DCE, and RTS indicates permission from the DTE for the DCE to send data to
the DTE. RTS and CTS are controlled by the DTE and DCE respectively, each
independent of the other. This was eventually codified in version RS-232-E (actually
TIA-232-E by that time) by defining a new signal, "RTR (Ready to Receive)," which is
CCITT V.24 circuit 133. TIA-232-E and the corresponding international standards were
updated to show that circuit 133, when implemented, shares the same pin as RTS
(Request to Send), and that when 133 is in use, RTS is assumed by the DCE to be ON at
all times.
Thus, with this alternative usage, one can think of RTS asserted (positive voltage,
logic 0) meaning that the DTE is indicating it is "ready to receive" from the DCE, rather
than requesting permission from the DCE to send characters to the DCE.
Note that equipment using this protocol must be prepared to buffer some extra data,
since a transmission may have begun just before the control line state change.
25
http://en.wikipedia.org/wiki/8250_UARThttp://en.wikipedia.org/wiki/MIDIhttp://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/MIDIhttp://en.wikipedia.org/wiki/8250_UART
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
38/88
RTS/CTS handshaking is an example of hardware flow control. However,
"hardware flow control" in the description of the options available on an RS-232-
equipped device does not always mean RTS/CTS handshaking.
2.2.3.9 3-wire and 5-wire RS-232
Minimal “3-wire” RS-232 connections’ consisting only of transmit data, receive
data, and ground, is commonly used when the full facilities of RS-232 are not required.
Even a two-wire connection (data and ground) can be used if the data flow is one way
(for example, a digital postal scale that periodically sends a weight reading, or a GPS
receiver that periodically sends position, if no configuration via RS-232 is necessary).
When only hardware flow control is required in addition to two-way data, the RTS and
CTS lines are added in a 5-wire version.
2.2.3.10 Seldom used features
The EIA-232 standard specifies connections for several features that are not used in
most implementations. Their use requires the 25-pin connectors and cables, and of course
both the DTE and DCE must support them.
a) Signal rate selection
The DTE or DCE can specify use of a "high" or "low" signaling rate. The rates as
well as which device will select the rate must be configured in both the DTE and DCE.
The prearranged device selects the high rate by setting pin 23 to ON.
b) Loopback testing
Many DCE devices have a loopback capability used for testing. When enabled,
signals are echoed back to the sender rather than being sent on to the receiver. If
supported, the DTE can signal the local DCE (the one it is connected to) to enter
loopback mode by setting pin 18 to ON, or the remote DCE (the one the local DCE is
connected to) to enter loopback mode by setting pin 21 to ON. The latter tests the
communications link as well as both DCE's. When the DCE is in test mode it signals the
DTE by setting pin 25 to ON.
A commonly used version of loopback testing does not involve any special
capability of either end. A hardware loopback is simply a wire connecting complementary
pins together in the same connector
Loopback testing is often performed with a specialized DTE called a bit error rate
tester (or BERT).
26
http://en.wikipedia.org/wiki/Flow_control%23Hardware_flow_controlhttp://en.wikipedia.org/wiki/Loopbackhttp://en.wikipedia.org/wiki/Bit_error_rate_testhttp://en.wikipedia.org/wiki/Bit_error_rate_testhttp://en.wikipedia.org/wiki/Bit_error_rate_testhttp://en.wikipedia.org/wiki/Bit_error_rate_testhttp://en.wikipedia.org/wiki/Loopbackhttp://en.wikipedia.org/wiki/Flow_control%23Hardware_flow_control
8/20/2019 vehicletrackingsystemusinggpsandgsmtechniques-140416102026-phpapp02.pdf
39/88
2.2.3.11 Timing Signals
Some synchronous devices provide a clock signal to synchronize data transmission,
especially at higher data rates. Two timing signals are provided by the DCE on pins 15
and 17. Pin 15 is the transmitter clock, or send timing (ST); the DTE puts the next bit onthe data line (pin 2) when this clock transitions from OFF to ON (so it is stable during the
ON to OFF transition when the DCE registers the bit). Pin 17 is the receiver clock, or
receive timing (RT); the DTE reads the next bit from the data line (pin 3) when this clock
transitions from ON to OFF.
Alternatively, the DTE can provide a clock signal, called transmitter timing (TT), on
pin 24 for transmitted data. Data is changed when the clock transitions from OFF to ON
and read during the ON to OFF transition. TT can be used to overcome the issue where
ST must traverse a cable of unknown length and delay, clock a bit out of the DTE after
another unknown delay, and return it to the DCE over the same unknown cable delay.
Since the relation between the transmitted bit and TT can be fixed in the DTE design, and
since both signals traverse the same cable length, using TT eliminates the issue. TT may
be generated by looping ST back with an appropriate phase change to align it with the
transmitted data. ST loop back to TT lets the DTE use the DCE as the frequency
reference, and correct the clock to data ti