
Vector J1939 User Day - Vector: Software + Services for ... Code Field Deployement Define...
28
Vector J1939 User Day Stuttgart - Weilimdorf 5 th March 2008 Verification, virtual validation with CANoe/Matlab Anthony Faucogney, Vector France Stéphane Martin, Volvo 3P - EEEL
Transcript of Vector J1939 User Day - Vector: Software + Services for ... Code Field Deployement Define...

Vector J1939 User DayStuttgart - Weilimdorf5th March 2008
Verification, virtual validation with CANoe/Matlab
Anthony Faucogney, Vector FranceStéphane Martin, Volvo 3P - EEEL


Summary
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 2
➡ Background
➡ Challenges
➡ Modeling concepts
➡ GSECU demonstrator
➡ Conclusions
➡ Next step...

Level of complexicity is growing and number of ECUs is increasing
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 3
Background
Time

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 4
Background toolsSeparated worlds...and how to reunify them
Network simulation:J1939J1587LIN...
Function simulation (ECU level)
Vehicle model (or mechanical model)
Acquisition cardsSimulation cards
HIL
CA
Noe
Matlab
Automatic tests

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 5
Challenges
2005 2006 2007 2008 20092004
Implementation Demonstrator and first applications New test rigsMATLAB CANoe
FocusImprove tools used in all EEE department in the product development and verification phases.Analysis of interaction Mechanics - Networks - Electrics - SoftwareMethods: Co-simulation between networks and modelsEstablished software plateforms
ModelsMechanics: PowerTrain driveline - VehicleFunctions: ECUs functionsNetworks: J1939 - J1587 - LIN
ApplicationsUnitary testsSub-system testsRequirements verification

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 6
Real ECU Virtual ECU
Modeling conceptsECU architecture

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 6
Real ECU Virtual ECU
Matlab/Simulink
model wich simulates the
functions included in the ECU
Functions included in the ECU
Activators
Sensors
NetworksJ1939/J1587/LIN
Acquisition boards drivers
Simulation boards drivers
CANoeJ1939/J158/LIN
Modeling conceptsECU architecture
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 7
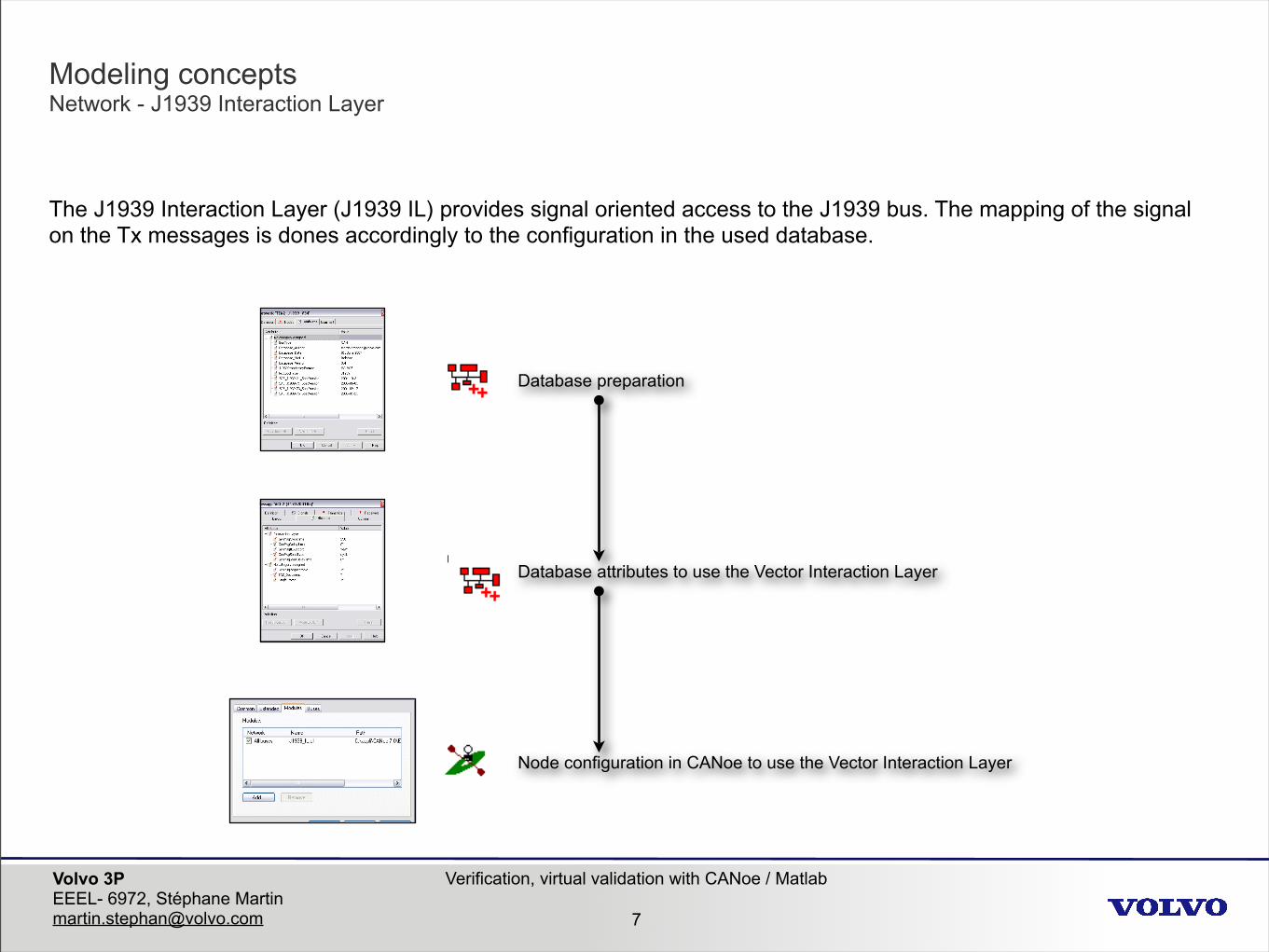
Modeling conceptsNetwork - J1939 Interaction Layer
The J1939 Interaction Layer (J1939 IL) provides signal oriented access to the J1939 bus. The mapping of the signal on the Tx messages is dones accordingly to the configuration in the used database.
Database preparation
Database attributes to use the Vector Interaction Layer
Node configuration in CANoe to use the Vector Interaction Layer

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 8
Modeling conceptsVehicle model or functional model?

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 8
Modeling conceptsVehicle model or functional model?
Functional modelTransmission ECU (Robotized gearbox)e.g: gear selection, gear shifting
Mechanical model or vehicle modele.g: speed range (mechanical)
e.g. robotized gearbox

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 9
Modeling conceptsSimulation Toolkit
CANoe (networks simulation)
Simulink, ECU models (compiled for CANoe with RTW)
Simulink, Vehicle model (compiled for CANoe with RTW)
CANoe (automatic tests)
Matlab
Matlab
CANoe (HMI)
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 10
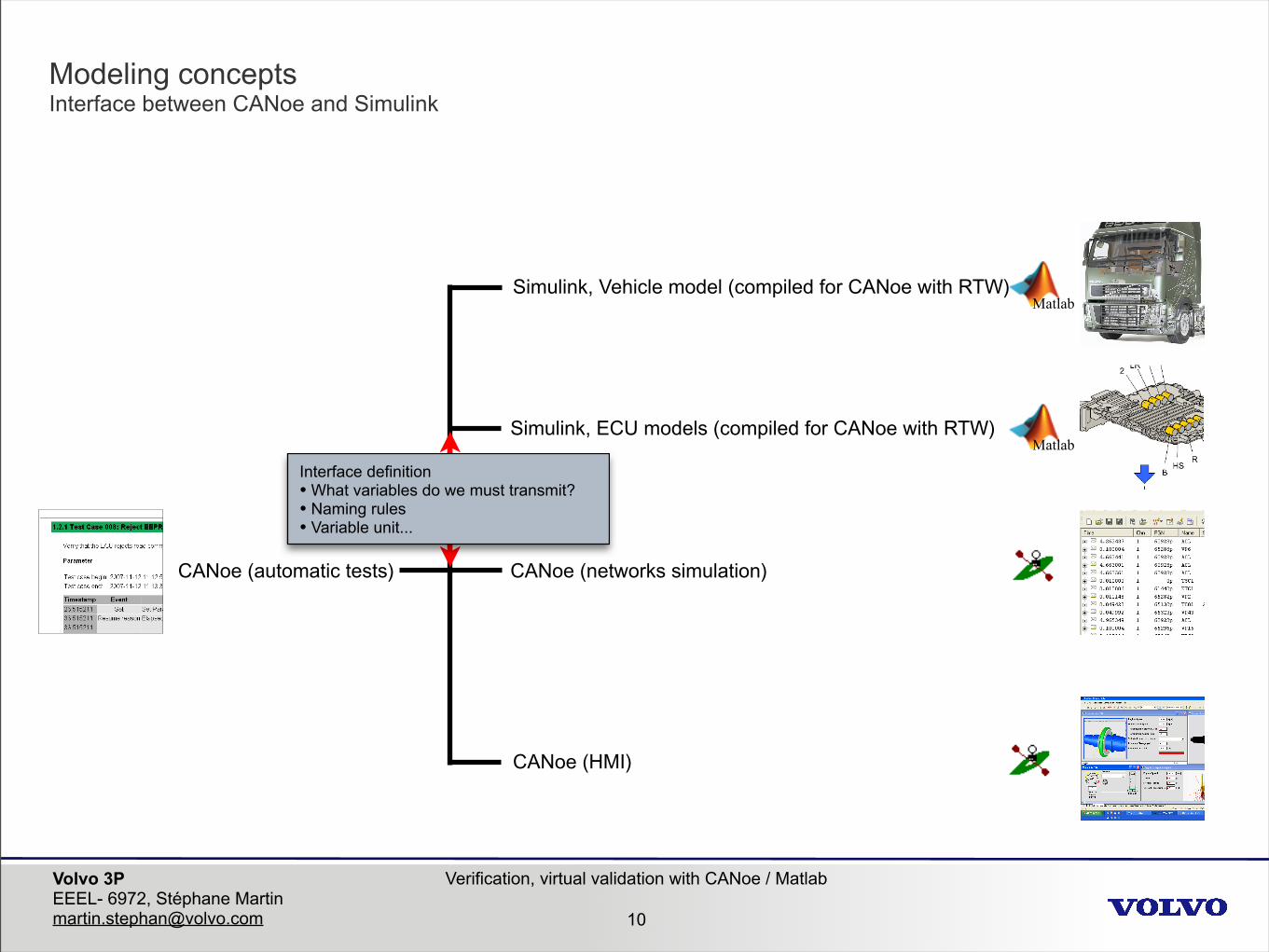
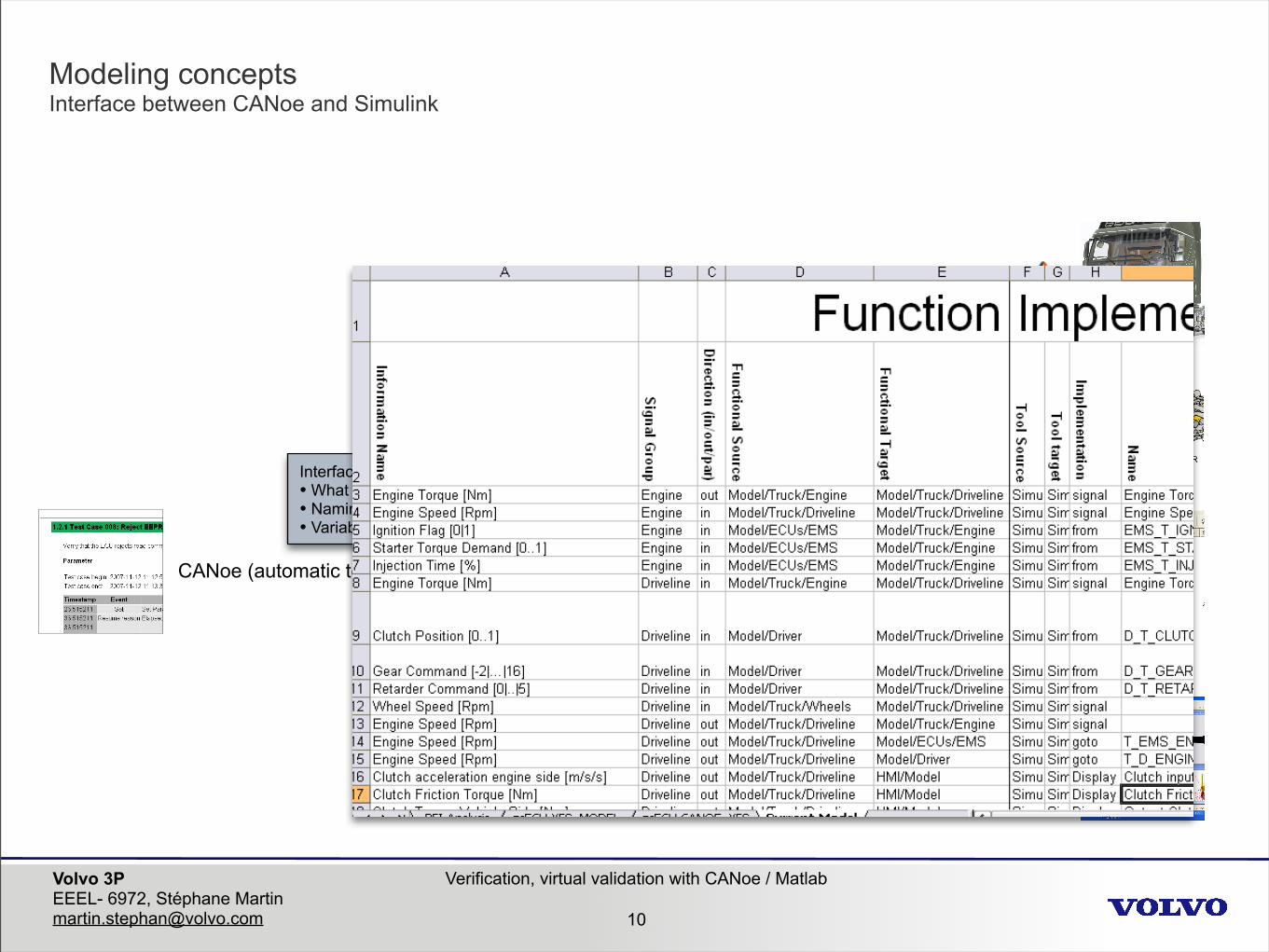
Modeling conceptsInterface between CANoe and Simulink
CANoe (networks simulation)
Simulink, ECU models (compiled for CANoe with RTW)
Simulink, Vehicle model (compiled for CANoe with RTW)
CANoe (automatic tests)
Matlab
Matlab
CANoe (HMI)
Interface definition• What variables do we must transmit?• Naming rules• Variable unit...
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 10
Modeling conceptsInterface between CANoe and Simulink
CANoe (networks simulation)
Simulink, ECU models (compiled for CANoe with RTW)
Simulink, Vehicle model (compiled for CANoe with RTW)
CANoe (automatic tests)
Matlab
Matlab
CANoe (HMI)
Interface definition• What variables do we must transmit?• Naming rules• Variable unit...

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 11
Gear shift ECU demonstratorWhat is a gear shift ECU?
EMS2 TECU EBS
ECS
VECUIC
GSECU
EMS2 TECUICVECUEBSECSGSECU
Engine ECUTransmission ECUInstrument ClusterVehicle ECUBrake ECUAir suspension ECUGear shift ECU
Real ECU
Virtual ECU
J1939

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 11
Gear shift ECU demonstratorWhat is a gear shift ECU?
EMS2 TECU EBS
ECS
VECUIC
GSECU
EMS2 TECUICVECUEBSECSGSECU
Engine ECUTransmission ECUInstrument ClusterVehicle ECUBrake ECUAir suspension ECUGear shift ECU
Real ECU
Virtual ECU
J1939

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 11
Gear shift ECU demonstratorWhat is a gear shift ECU?
EMS2 TECU EBS
ECS
VECUIC
GSECU
EMS2 TECUICVECUEBSECSGSECU
Engine ECUTransmission ECUInstrument ClusterVehicle ECUBrake ECUAir suspension ECUGear shift ECU
Real ECU
Virtual ECU
J1939

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 12
Gear shift ECU demonstratorGSECU test rig - Synoptic
Matlab
Matlab/Simulink allows to design:• ECUs models (fonctional models)• Vehicle model
RTW (Real Time Workshop) with the Vector target allows to generate a *.dll to CANoe.

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 13
Gear shift ECU demonstratorCANoe’s use for the panels design

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)
ProductionCode
FieldDeployement
DefineRequirements
System modeling
Softwaredesign
System integration &
tests
Softwareintegration &
testsHIL

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
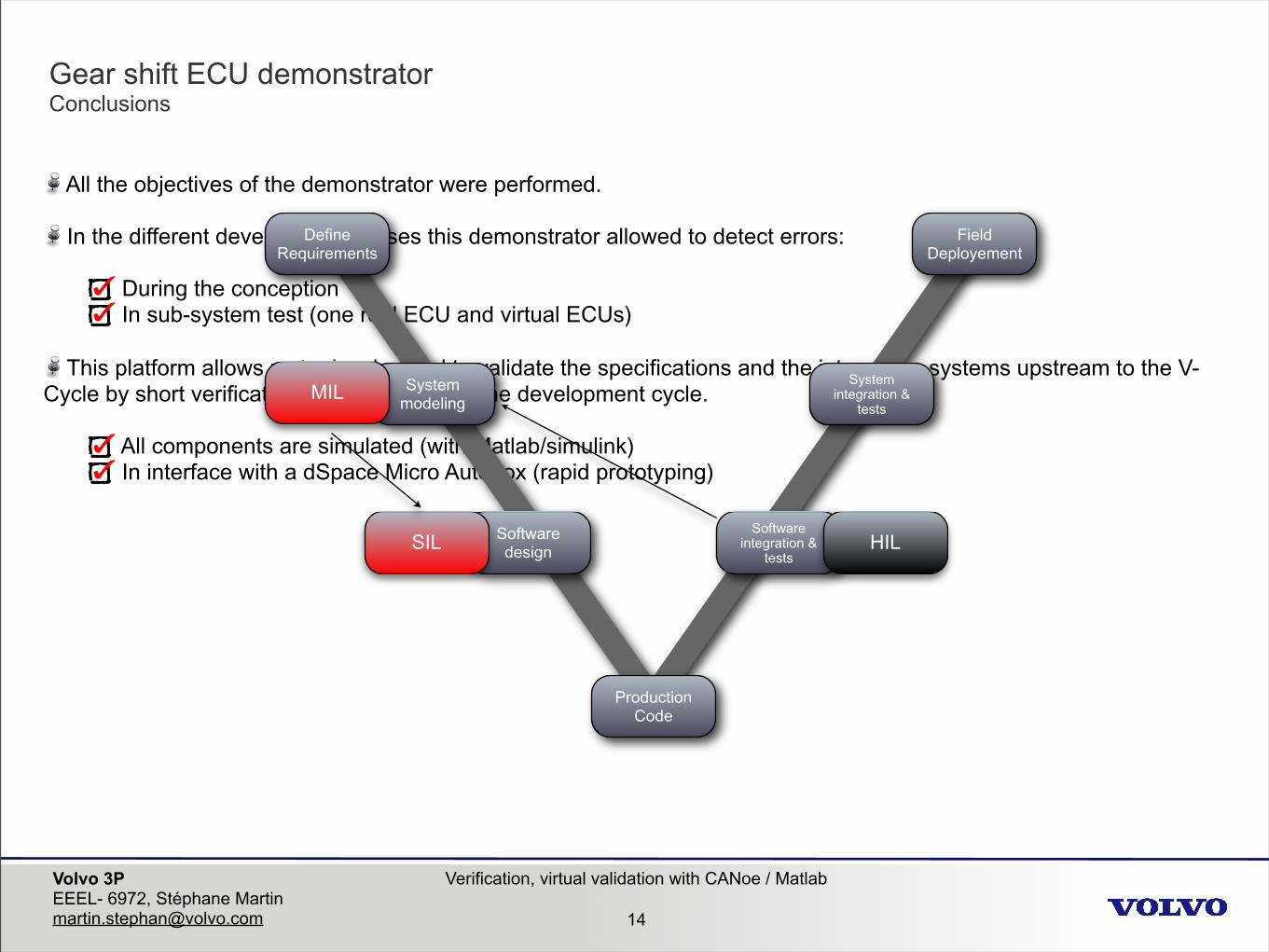
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)
This platform allows us to develop and to validate the specifications and the integration systems upstream to the V-Cycle by short verification cycles joined into the development cycle.
All components are simulated (with Matlab/simulink) In interface with a dSpace Micro Autobox (rapid prototyping)
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)
This platform allows us to develop and to validate the specifications and the integration systems upstream to the V-Cycle by short verification cycles joined into the development cycle.
All components are simulated (with Matlab/simulink) In interface with a dSpace Micro Autobox (rapid prototyping)
ProductionCode
FieldDeployement
DefineRequirements
System modeling
Softwaredesign
System integration &
tests
Softwareintegration &
testsHIL
MIL
SIL

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
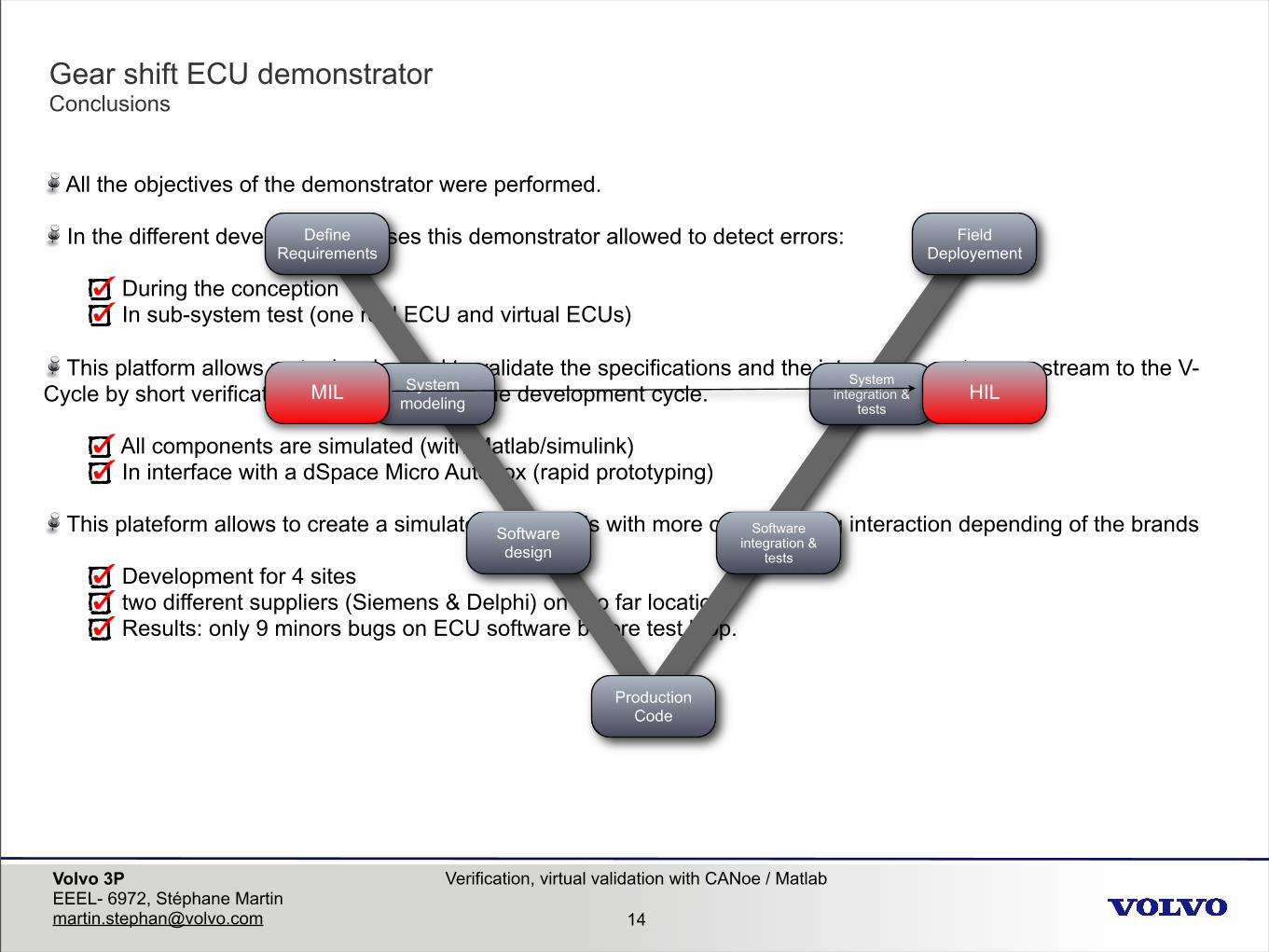
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)
This platform allows us to develop and to validate the specifications and the integration systems upstream to the V-Cycle by short verification cycles joined into the development cycle.
All components are simulated (with Matlab/simulink) In interface with a dSpace Micro Autobox (rapid prototyping)
This plateform allows to create a simulator for 2 ECUs with more or less strong interaction depending of the brands
Development for 4 sites two different suppliers (Siemens & Delphi) on two far location Results: only 9 minors bugs on ECU software before test loop.
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 14
Gear shift ECU demonstratorConclusions
All the objectives of the demonstrator were performed.
In the different development phases this demonstrator allowed to detect errors:
During the conception In sub-system test (one real ECU and virtual ECUs)
This platform allows us to develop and to validate the specifications and the integration systems upstream to the V-Cycle by short verification cycles joined into the development cycle.
All components are simulated (with Matlab/simulink) In interface with a dSpace Micro Autobox (rapid prototyping)
This plateform allows to create a simulator for 2 ECUs with more or less strong interaction depending of the brands
Development for 4 sites two different suppliers (Siemens & Delphi) on two far location Results: only 9 minors bugs on ECU software before test loop.
ProductionCode
FieldDeployement
DefineRequirements
System modeling
Softwaredesign
System integration &
tests
Softwareintegration &
tests
MIL HIL

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 15
The next step....
Integration of reflective memory in CANoe
Create a “universal port” for CANoe which would allow a seamless test environment combining simulation (e.g. Simulink models), networks (e.g. J1939, LIN, Flexray) and hardware (e.g, digital I/O and analog I/O).
Allow to create a real-time and determinist link with others applications (e.g. LabVIEW, MathWorks Xpc Target)
Allow to create a multiprocessor architecture based on CANoe realtime
Parameterization of models with a setting tool
Using this work for the new platform of tests

Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 16
Thank you for your attention
[email protected]@volvo.com
Verification, virtual validation with CANoe / MatlabVolvo 3PEEEL- 6972, Stéphane [email protected] 16
Thank you for your attention
[email protected]@volvo.com


















