VSNR: THE VARIATIONAL STATIONARY NOISE REMOVER 1 Variational

J Sci ComputDOI 10.1007/s10915-013-9767-z
Variational Dynamics of Free Triple Junctions
Hayden Schaeffer · Luminita Vese
Received: 30 August 2012 / Revised: 29 July 2013 / Accepted: 3 August 2013© Springer Science+Business Media New York 2013
Abstract We propose a level set framework for representing triple junctions either with orwithout free endpoints. For triple junctions without free endpoints, our method uses twolevel set functions to represent the three segments that constitute the structure. For freetriple junctions, we extend our method using the free curve work of Schaeffer and Vese(J Math Imaging Vis, 1–17, 2013), Smereka (Phys D Nonlinear Phenom 138(3–4):282–301, 2000). For curves moving under length minimizing flows, it is well known that theendpoints either intersect perpendicularly to the boundary, do not intersect the boundaryof the domain or the curve itself (free endpoints), or meet at triple junctions. Althoughmany of these cases can be formulated within the level set framework, the case of freetriple junctions does not appear in the literature. Therefore, the proposed free triple junctionformulation completes the important curve structure representations within the level setframework. We derive an evolution equation for the dynamics of the triple junction underlength and area minimizing flow. The resulting system of partial differential equations areboth coupled and highly non-linear, so the system is solved numerically using the Sobolevpreconditioned descent. Qualitative numerical experiments are presented on various triplejunction and free triple junction configurations, as well as an example with a quadruplejunction instability. Quantitative results show convergence of the preconditioned algorithmto the correct solutions.
Keywords Triple junction · Free endpoints · Energy minimization · Level set method ·Essentially non-oscillatory · Curve evolution
H. Schaeffer (B) · L. VeseDepartment of Mathematics, University of California, Los Angeles, CA, USAe-mail: [email protected]
L. Vesee-mail: [email protected]
123

J Sci Comput
1 Introduction and Motivation
Dynamics of curves with various structures appear in many disciplines ranging from imageprocessing to fracture mechanics. Numerical methods involving the evolution of curves fallinto two main categories: 1. numerical representations of curves and 2. methods and algo-rithms for curve motion. With respect to representations, the level set method [29] has seenmuch success in the literature for its flexibility and efficiency. To represent a curve Γ whichencloses an open subset of a given domainΩ , one can define a Lipschitz continuous functionφ : Ω → R such that φ > 0 in the region enclosed by the curve and φ < 0 outside of theregion enclosed by the curve. Then the zero level set of φ defines the curve Γ . The classicallevel set formulation only allows curves that are non-intersecting loops. Many extensionsexist, particularly the work of Smereka [37], which proposed a formulation that allows forfree endpoints (also known as arcs or crack tips) by using two level set functions, and the workof [25,45], which uses three level set functions to represent triple junctions. In this work, wepropose a formulation of (free) triple junctions that uses two (three) level set functions.
The curve evolution problems we consider here have two properties in common: 1. thedynamics is derived from an energy minimizing equation and 2. the energy is a functionaldepending on the geometry of the curve and domain. The natural geometric measures asso-ciated with curves are the length of the curve itself and the area enclosed by the curve.
For the general framework, we will follow the theory from [1,30,42,43]. Assume thegiven domain is Ω ⊂ R
2 which is composed of disjoint subsets (or subdomains) Ω j where1 ≤ j ≤ n. The boundary between any two subdomainsΩi andΩ j is defined as the segmentΓi j ( Γi j := (
∂Ωi ∩ ∂Ω j) \ ∂Ω where the boundary of the domain is ignored) and the
union of all boundaries is defined as the curve Γ = ⋃ni, j=1 Γi j . With these definitions, the
following natural energy can be associated with the segments and the subdomains:
E(Γ,Ω) = L(Γ )+ A(Ω), (1)
where the Length functional L(Γ ) and Area functional A(Ω) are defined as:
L(Γ ) =n∑
i, j=1
li j Length(Γi j ),
A(Ω) =n∑
j=1
a j Area(Ω j ),
with li j and a j strictly positive weights. Note that the functionals are dependent on theparticular partitioning of the domain and not on the domain itself.
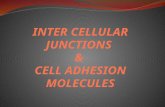
Minimizers of Eq. (1) are characterized by segments whose vertices intersect to format most triple junctions. It can be shown that for equal length weights, larger junctions areunstable and degenerate to multiple triple junctions. Therefore, we focus our attention onthe dynamics of triple junctions. Figure 1 shows the configuration of a triple junction andthe respective partitioning of the domain. The angles between each of the segments have thefollowing relationship [30]:
sin(θ1)
l23= sin(θ2)
l13= sin(θ3)
l12. (2)
Thus the length weights and angle configuration have a direct relationship.In [45], the authors use three level set functions to represent a triple junction without
endpoints. Each of the level set functions φ j , for 1 ≤ j ≤ 3, corresponds to a subdomain
123

J Sci Comput
Fig. 1 Configuration of a triple junction: the three segments, the angles between the segments, and thepartitioned domain are highlighted
Ω j , while the zero contours of the level set function correspond to the boundaries of Ω j . Inthis framework, the zero contours overdetermine the segments Γi j . The energy [Eq. (1)] iswritten as:
L(Γ ) =3∑
i=1
γi
∫|∇ H(φi )|, (3)
A(Ω) =3∑
i=1
ai
∫H(φi )dx,
where li j = γi +γ j and γi and ai are strictly positive. Here, H(·) is the Heaviside F function,which is 1 for positive arguments and zero otherwise. To avoid the development of vacuumor overlapping regions over time, the following constraint is used:
n∑
i=1
H(φi ) = 1.
Altogether this formulation achieves the physically and theoretically correct solution,although vacuum regions on the order of h2 appear (where h is the discrete space stepsize). An advantage of this representation is that the system of partial differential equationsthat results for the minimization is decoupled. However, this framework makes it difficult toextend to free junctions because of the number of degrees of freedom.
In [25], the authors applied the level set method to multiple junctions without endpoints.The method is based on diffusion of characteristic functions on each of the regions and a levelset reinitialization step for regularizing the level set function away from the zero level curve.The algorithm is fast and efficient, since it is based on thresholding a linear partial differentialequation. However, since each region has a level set function, vacuum and overlap regionsdevelop and must be processed. In [33,34], a spectral method was proposed, which increasednumerical accuracy. Projection based algorithms for the motion of multiple junctions havealso been proposed, see for example [39].
123

J Sci Comput
In [44], the authors proposed a formulation using two level set functions for triple junctionswithout endpoints, with the application of image segmentation. Their curve representationdid not contain vacuum or overlap; however, it does not approximate the proper lengthfunctional. In [14], a formulation for area preserving motion is proposed. The authors of[22] use the piecewise constant level set framework for mean curvature flow of multiplejunctions.
Both triple junctions and free triple junctions are important to many applications. Inimage processing and computer vision, many segmentation methods (based on the Mumford-Shah model [26]) use a length regularizer for the edge set (see [2,5–7,24,36,44]). Thesegmentation problem as presented in [26] is as follows: to reconstruct an image u and anedge set Γ from a given image f ∈ L2(Ω) which may be degraded, minimize the followingenergy:
EM S(u, Γ ) =∫
Ω\Γ|∇u|2dx + γ
∫
Ω
|u − f |2dx + λLength(Γ ),
where γ and λ are strictly positive. Minimizing curves Γ are composed of segments whoseendpoints either intersect perpendicularly to the boundary, do not intersect the boundaryof the domain or the curve itself, or meet at triple junctions. Models based on or relatedto the Mumford-Shah model typically inherit this property. For object and edge detectionmany works uses the idea of free curves, but must rely on explicit curve representations. Forexample, the Snakes active contours model uses splines [18] and [19] uses marker-pointsmethod. For more examples of imaging model and methods that use free endpoints, see[9,20,21].
In the field of fracture mechanics, the quasi-static growth model for brittle fractures(cracks) can be formulated as the following minimization problem [12]:
EFracture(u, Γ ) =∫
Ω\Γ|∇u|2dx + λLength(Γ )
subject to the constraint that u = u0 on ∂Ω \ Γ (for λ > 0). Minimizing curves Γ maycontain triple junctions, depending on the boundary data u0. A related problem of optimalcutting [4] looks for minimizers of the fracture energy with λ = 0 and with the additionalconstraint that Γ contains a given set of points. If Γ is asked to pass through three or morepoints, it is natural to form triple junctions as solutions. Although in fracture models, theunderlying dynamics do not necessarily depend on motion in the normal direction, rather onthe growth of the crack tip and its bifurcation.
Lastly, when modeling systems of many physical objects, such as fluids or materials,their interaction interfaces form by minimizing surface tension and bulk modulus. For exam-ple, foams (collections of bubbles) interact and form stable structures by minimizing thesize of their contact surface. If projected onto the plane, this is a length minimization prob-lem with a large number of stable triple junctions forming over time. The general energypresented and studied in this work [Eq. (1)] is precisely the one derived from materialscience.
The paper is organized as follows. Section 2 describes the free curve representation andenergy formulation. Section 3 details the triple junction framework and resulting evolutionequations. The numerical implementation and algorithm is presented in Sect. 4. In Sect. 5, themethod is applied to various qualitative and quantitative experiments, including free triplejunctions and quadruple junction instability. Lastly, Sect. 6 concludes the work.
123

J Sci Comput
2 Curve Representation
2.1 Free Segments
To represent a curve composed of segments with free endpoints (i.e. a curve composed ofarcs or crack tips) within the framework of the level set method, Smereka [37] proposed usinga second level set function to control the endpoint dynamics. Thus a free curve Γ f ree can berepresented as the zero level set of a Lipschitz continuous function φ : Ω → R within theregion defined by the positive range of a second Lipschitz continuous function ν : Ω → R.Therefore, we define Γ f ree as:
Γ f ree := {(x, y) ∈ Ω|φ(x, y) = 0, ν(x, y) > 0} . (4)
The natural free extension to multiple junctions would be to include the partition function νin the formulation of [25,45]. However, this would increase the number of level set functionsneeded to represent a triple junction to four. In order to reduce the degrees of freedom of theprevious junction representations, we propose a two level set function formulation for triplejunctions. Also, the use of two level set functions avoids the formation of vacuum or overlapregions near the junction, since the two level sets intersect.
2.2 Triple Junctions
A triple junction whose endpoints intersect the boundary of the domain can be viewed asa partitioning of the domain. Using two level set functions, φ and ψ , the domain can bedecomposed into three non-overlapping regions Ω = Ω0 ∪Ω+ ∪Ω− where:
Ω0 := {(x, y) ∈ Ω|φ(x, y) < 0}Ω+ := {(x, y) ∈ Ω|φ(x, y) > 0, ψ(x, y) > 0}Ω− := {(x, y) ∈ Ω|φ(x, y) > 0, ψ(x, y) < 0} .
Since this work focuses on triple junctions, we will simplify the general notation from Sect. 1(using subscripts 0, +, and − to denote the regions and later the segments). The associ-ated characteristic functions on the subdomains Ω0, Ω+, and Ω− are given by H(−φ),H(φ)H(ψ), and H(φ)H(−ψ), respectively. The triple junction (ΓT ) is defined as the unionof the boundaries of these subdomains:
ΓT := {φ = 0} ∪ { {φ > 0} ∩ {ψ = 0} } .Specifically, the three individual segments of the triple junction are {φ = 0} ∩ {ψ > 0},{φ = 0} ∩ {ψ < 0}, and {φ > 0} ∩ {ψ = 0}. This formulation uses the minimal amount oflevel set functions. Note that the segment {φ < 0} ∩ {ψ = 0} is ignored.
Next, using this formulation for triple junctions, we can define a free triple junction byintroducing the curve partitioning function ν. Unlike the previous definition, the free triplejunctions do not partition up the domain into the union of open sets. However, following thedefinition of ΓT , the free triple junction is defined as follows:
Γ f T := {{φ = 0} ∪ { {φ > 0} ∩ {ψ = 0} } ∩ {ν > 0}} .Using this formulation, we have reduced the number of functions needed to define the curveand have extended the framework to include triple junctions with free endpoints.
123

J Sci Comput
2.3 Energy Minimization
From [36], the curve definitions from Sect. 2.2 can be formulated in a variational method withgeometric functionals. For example, using the free segment definition [Eq. (4)] the Lengthfunctional, Length(Γ f ree) becomes [15]:
L(φ, ν) =∫
|∇ H(φ)|H(ν). (5)
Next, by taking a smooth approximation Hε for the Heaviside function, Eq. (5) is equivalentto the following:
Lε(φ, ν) =∫
|∇φ|δε(φ)Hε(ν)dx (6)
where δε = H ′ε is a smooth approximation of the Dirac delta function. From [36], the
following theorem provides the sufficient consistency between Eqs. (5) and (6) as ε → 0.
Theorem 1 ( Consistency) Let Lε(φ, ν) be defined by Eq. (6) with Hε satisfying the followingproperties
1. Hε(x) → H(x) point-wise everywhere except at x = 02. δε = H ′
ε
3. Hε ∈ C1
and let φ and ν be Lipschitz continuous functions over Ω . Then
limε→0
Lε(φ, ν) =∫
{φ=0}H(ν)ds = Length(Γ f ree).
Theorem 1 allows us to make the substitution ds = |∇φ|δ(φ)H(ν)dx , which will be usedfrequently in this work.
Equation (6) provides a differentiable functional in terms of the underlying level setfunctions. To define a time dependent curve evolution which minimizes Eq. (6), one can takethe first variation and embed it in a dynamic scheme as follows:
∂φ
∂t= δε(φ)div
(Hε(ν)
∇φ|∇φ|
)
dν
dt= −δε(ν)δε(φ)|∇φ| (7)
with Neumann boundary conditions. The equations above define a mean curvature flow forφ and an area-minimizing Hamilton-Jacobi equation for ν. The extra degrees of freedomprovided by the additional level set function can cause Eq. (7) to be unstable. One factorfor this instability is that the motion of ν is unregularized and essentially controlled by avery small region of the domain, thus causing bunching of the level sets near zero. Note alsothat the ordinary differential equation for ν essentially controls only the endpoints of eachsegment of Γ f ree. To stabilize the system, each equation can be perturbed by a smoothingoperator S (also dropping the ε subscript):
∂φ
∂t= δ(φ)div
(H(ν)
∇φ|∇φ|
)+ S(φ)
∂ν
∂t= −δ(ν)δ(φ)|∇φ| + S(ν)
123

J Sci Comput
Many choices for S exist, for example the p-Laplacian operators, which are equivalent toadding a p-norm regularizer to the Length functional. However, in order to preserve theproper flow, i.e. minimize the same functional, we use the time-derivative of the Laplacian:
∂φ
∂t= δ(φ)div
(H(ν)
∇φ|∇φ|
)+ γ
∂
∂t φ
∂ν
∂t= −δ(ν)δ(φ)|∇φ| + γ
∂
∂t ν
or more compactly:
∂φ
∂t= (I − γ )−1
(δ(φ)div
(H(ν)
∇φ|∇φ|
))
∂ν
∂t= (I − γ )−1 (−δ(ν)δ(φ)|∇φ|) (8)
where γ > 0 is a small parameter. This smoothing is known as the Sobolev gradient andcan be seen as a preconditioned descent equation. The origins of this method date back tothe work of [10]. For more on the more recent uses of the Sobolev gradient, see for example[3,17,27,31,32,35,36,40].
Remark 1 To check that the preconditioned flow preserves minimizers and descent direction,let Eq. (8) define the flow for φ and ν. Formally differentiating with respect to time yields:
d
dtL(φ, ν) = d
dt
∫|∇φ|δ(φ)H(ν)dx
=∫
∂
∂t(|∇φ|δ(φ)H(ν)) dx
=∫ ( ∇φ
|∇φ| · ∇ ∂φ∂t
δ(φ)H(ν)+ |∇φ|δ′(φ)H(ν)∂φ∂t
+ |∇φ|δ(φ)δ(ν)∂ν∂t
)dx
Next, integration by parts and substitution using Eq. (8) yields:∫ (
∂φ
∂t
(−div
( ∇φ|∇φ|δ(φ)H(ν)
)+ |∇φ|δ′(φ)H(ν)
)+ |∇φ|δ(φ)δ(ν)∂ν
∂t
)dx
=∫
−(∂φ
∂t(I − γ )
∂φ
∂t+ ∂ν
∂t(I − γ )
∂ν
∂t
)dx
= −∥∥∥∥∂φ
∂t
∥∥∥∥
2
H1γ
−∥∥∥∥∂ν
∂t
∥∥∥∥
2
H1γ
≤ 0
where H1γ is the standard Sobolev space equipped with the weighted norm:
‖w‖2H1γ
= ‖w‖2L2 + γ ‖∇w‖2
L2 .
Thus the Length functional is strictly decreasing when the level sets are non-stationary. Notethat as γ → 0, we recover the standard (un-regularized) gradient descent.
Remark 2 When the time derivative is discretized using forward Euler, it can be shown thatthe Sobolev gradient scheme is equivalent (in the discrete sense) to the semi-implicit methodswhich add and substract the same diffusion term, for example, see [38].
123

J Sci Comput
3 Triple Junction
3.1 Formulation without Endpoints
Recall that the proposed level set representation for a triple junction is ΓT := {φ = 0} ∪{ {φ > 0} ∩ {ψ = 0} }. Following the construction from Sect. 2.3, the energy functional canbe written as functions of φ and ψ as follows:
ET (φ, ψ) = LT (φ, ψ)+ AT (φ, ψ) (9)
where the Length and Area functionals are defined as:
LT (φ, ψ) =∫(l+|∇ H(φ)|H(ψ)+ l−|∇ H(φ)|H(−ψ)+ l0|∇ H(ψ)|H(φ)) dx
AT (φ, ψ) =∫(a+ H(φ)H(ψ)+ a− H(φ)H(−ψ)+ a0 H(−φ)) dx
As before, assuming that the Heaviside and Dirac delta functions are replaced by C1
approximations, the first variation of Eq. (9) embedded in a dynamical scheme is:
∂φ
∂t= δ(φ)
(div
(χ(ψ)
∇φ|∇φ|
)− l0|∇ H(ψ)| + (a− − a+)H(−ψ)− a0
)
∂ψ
∂t= δ(ψ)
(l0 div
(H(φ)
∇ψ|∇ψ |
)− (l+ − l−)|∇ H(φ)| − (a+ + a−)H(φ)
)(10)
where χ(ψ) = l+ H(ψ)+ l− H(−ψ) and with Neumann boundary conditions. Both equa-tions above are mean curvature flows. Similar to Remark 1, Eq. (10) can be shown to minimizeEq. (9).
3.2 Formulation with Free Endpoints
Recall that in the case of free triple junctions, the proposed level set representation is Γ f T :={{φ = 0} ∪ { {φ > 0} ∩ {ψ = 0} }} ∩ {ν > 0} . Similarly to Sect. 3.1, the Length functionalcan be written function of φ, ψ , and ν as follows:
L f T (φ, ψ, ν)=∫(l+|∇ H(φ)|H(ψ)+l−|∇ H(φ)|H(−ψ)+l0|∇ H(ψ)|H(φ)) H(ν)dx
(11)
For free curves, there is no natural definition for the area enclosed by the segments of thetriple junctions, so the Area functional is excluded. Again, assuming that the Heaviside andDirac delta functions are replaced by C1 versions, the first variation of Eq. (11) is embeddedin a dynamical scheme as follows:
∂φ
∂t= δ(φ)
(div
(H(ν)χ(ψ)
∇φ|∇φ|
)− l0|∇ H(ψ)|
)
∂ψ
∂t= δ(ψ)
(l0 div
(H(ν)H(φ)
∇ψ|∇ψ |
)− (l+ − l−)|∇ H(φ)|
)
dν
dt= −δ(ν) (l+|∇ H(φ)|H(ψ)+ l−|∇ H(φ)|H(−ψ)+ l0|∇ H(ψ)|H(φ)) (12)
with Neumann boundary conditions. Once more, Eq. (12) can be shown to minimize Eq. (11).For the derivation see “Appendix”.
123

J Sci Comput
4 Numerical Discretization
The various systems of differential equations proposed in Sect. 3 are highly nonlinear andmust be carefully discretized. We will discuss two different types of discretizations, thepreconditioned scheme using the Euler Lagrange equations derived from the energy. Thisis more than sufficient for the imaging applications discussed in the introduction. We alsoprovide a preconditioned adaption of the ENO scheme without reinitialization applied to thelevel set rescaled forms of the equations discussed above. For the rest of the work, τ willrepresent the time step and h will represent the space step.
4.1 Preconditioned Gradient Descent
Since both equations which appear in the case of triple junctions without endpoints containa curvature term, there is sufficient regularity to discretize and linearize the equations usinga semi-implicit iterative scheme. Specifically, Eq. (10) can be discretized in φ as:
φn+1i, j − φn
i, j
τ= δ(φn
i, j )
⎛
⎜⎝ x−
⎛
⎜⎝
x+(χi, jnφn+1
i, j )√( x+φn
i, j )2 + (
y0φ
ni, j )
2
⎞
⎟⎠
+ y−
⎛
⎜⎝
y+(χi, j
nφn+1i, j )
√( x
0φni, j )
2 + ( y+φn
i, j )2
⎞
⎟⎠
−l0δ(ψni, j )
√( x
0ψni, j )
2 + ( y0ψ
ni, j )
2 − a+ Hε(ψni, j )+ a− H(−ψn
i, j ))− a0
⎞
⎟⎠ (13)
and with respect to the differential equation in ψ as:
ψn+1i, j − ψn
i, j
τ= δ(ψn
i, j )
⎛
⎝ x−
⎛
⎝ x+
(χn
0,i, jψn+1i, j
)
√( x+ψn
i, j )2 + (
y0ψ
ni, j )
2
⎞
⎠
+ y−
⎛
⎝
y+(χn
0,i, jψn+1i, j )√
( y+ψn
i, j )2 + ( x
0ψni, j )
2
⎞
⎠
−(l+ − l−)δ(φni, j )
√( x
0φni, j )
2 + ( y0φ
ni, j )
2 − (a+ + a−)H(φni, j )
⎞
⎠ (14)
where τ is the time step, and the operators +, −, and 0 are the forward, backward, andcentral differences (respectively) in space. The smooth Heaviside approximation is given byHε(x) = 1
2 + 1π
arctan( xε
).
Altogether, the algorithm for the semi-implicit scheme is outlined below. The reinitial-ization of the level set functions to the signed distance function [41] after each iteration canbe a large computational cost and must be done after some time for both the semi-implicitscheme and for the essentially non-oscillatory schemes.
On the other hand, using the Sobolev preconditioned scheme [27,31] both stabilizes andsimplifies the algorithm. Define the auxiliary variables v1 and v2 and let G1 and G2 be the
123

J Sci Comput
Algorithm: Semi-Implicit with ReinitializationInitialize φ0, ψ0
while t < T do
Step 1: Iterate φn forward using equation (13)
Step 2: Reinitialize φn+1 to a signed distance function
Step 3: Iterate ψn forward using equation (14)
Step 4: Reinitialize ψn+1 to a signed distance function
end while
right-hand-side of Eqs. (13) and (14) discretized explicitly in space. Then at each time step,one must solve vk − vk =Gk for k =1, 2 (with Neumann boundary conditions) and iteratethe level set functions with a forward Euler stepφn+1 =φn +τ v1 andψn+1 = ψn +τ v2. Theability to discretize explicitly in space makes the preconditioned descent useful for non-linearproblems. Altogether the algorithm is as follows.
Our Algorithm: Sobolev Preconditioned DescentInitialize φ0, ψ0
while t < T do
Step 1: Solve v1 − v1 = G1, where G1 is the explicit discrete first variation w.r.t. φ
Step 2: Iterate forward to φn using a forward Euler step and speed v1
Step 3: Solve v2 − v2 = G2, where G1 is the explicit discrete first variation w.r.t. ψ
Step 4: Iterate forward to ψn using a forward Euler step and speed v2
end while
In practice, vk − vk = Gk is solved using a few Gauss-Seidel sweeps.Next, the free triple junctions are discretized using the Sobolev preconditioned descent.
No semi-implicit algorithm is provided since instabilities may occur with the addition of thethird level set function. In particular, the parabolic CFL condition, τ ≤ Ch2, forces τ to besmall, but for the semi-implicit method the time steps are small enough to incur round-offerrors. Also, the semi-implicit methods can cause bunching to occur near the zero level set(the level set function may become discontinuous).
The vector norm of the gradient of the various level set functions may also be regularizedby adding a small parameter in the square root to prevent division by zero. If this is done, itmust be done in all of the equations to maintain consistency with the discretized energy.
In imaging applications this scheme may be prefered and for this reason we present ithere. However, for other applications, essentially non-oscillatory methods are more stableand closer to the true physical motion.
4.2 Preconditioned Essentially Non-Oscillatory Scheme
For the essential non-oscillatory version of our algorithm, we adapt the algorithm from [45].This yields the following discretization for the level set rescaled version of Eq. (10). Theequation for the evolution of φ becomes:
123

J Sci Comput
φn+1i, j − φn
i, j
τ= |∇φ|i, j
(χε(ψi, j ) div
( ∇φ|∇φ|
)
i, j− l0|∇ Hε(ψ)|i, j + a− Hε(−ψi, j )− a0
)
(15)
Similarly, the evolution of ψ is as follows:
ψn+1i, j − ψn
i, j
τ= |∇ψ |i, j
(l0 Hε(φi, j )div
( ∇ψ|∇ψ |
)
i, j− (l+ − l−)|∇ Hε(φ)|i, j
. . .− (a+ − a−)Hε(φi, j )
)(16)
The only term that is rescaled in each of the equations is the corresponding δ(·), since thelower order terms define the coupling between regions. This keeps the zero contours connectproperly. We have dropped the preconditioning term above for simplicity, but in the numericalexperiments, the operator (I − γ )−1 is applied to the right hand sides of Eqs. (15) and (16).The discrete curvature term in Eqs. (15) and (16) is defined as:
div
( ∇φ|∇φ|
)
i, j= 1
h
[(φx
|∇φ|)
i+ 12 , j
−(φx
|∇φ|)
i− 12 , j
]
. . . (17)
+ 1
h
[(φy
|∇φ|)
i, j+ 12
−(φy
|∇φ|)
i, j− 12
]
(18)
assuming constant space step in both directions. Each of the terms in Eq. (18) is defined as:(φx
|∇φ|)
i+ 12 , j
= φi+1, j − φi, j√(φi+1, j − φi, j )2 + ( 1
4 (φi, j+1 − φi, j−1 + φi+1, j+1 − φi+1, j−1))2
(19)(φx
|∇φ|)
i− 12 , j
= φi, j − φi−1, j√(φi, j − φi−1, j )2 + ( 1
4 (φi−1, j+1 − φi−1, j−1 + φi, j+1 − φi, j−1))2
(20)(φy
|∇φ|)
i, j+ 12
= φi, j+1 − φi, j√( 14 (φi+1, j − φi−1, j + φi+1, j+1 − φi−1, j+1)
)2 + (φi, j+1 − φi, j )2
(21)(φy
|∇φ|)
i, j− 12
= φi, j − φi, j−1√( 14 (φi+1, j−1 − φi−1, j−1 + φi+1, j − φi−1, j )
)2 + (φi, j − φi, j−1)2
(22)
For the first order gradient terms, we use a first order Godunov discretization. Generaliza-tions to the other equations follow directly from the discretization above; however, the levelset function that defines the free endpoints is not rescaled. This is done in order to keep thedifferent behaviors within the same time scale. In some experiments, rescaling the evolutionequation for the level set function ν causes the curve to instantly disappear. Since this is theminimal energy state, the rescaled equation moves towards it in one iteration. All togetherthe algorithm is as follows:
123

J Sci Comput
Our Algorithm: Sobolev Preconditioned ENO SchemeInitialize φ0, ψ0
while t < T do
Step 1: Solve v1 − v1 = G1, where G1 is the right hand side of equation (15)
Step 2: Iterate forward to φn+1 using a forward Euler step and speed v1
Step 3: Solve v2 − v2 = G2, where G2 is the right hand side of equation (16)
Step 4: Iterate forward to ψn+1 using a forward Euler step and speed v2
end while
Table 1 Evolution of a circleunder pure curvature flow
The Sobolev preconditioningparameter is γ = h2 and theresults are shown for t = 0.025
Grid size Number of iterations Absolute error Order
32 × 32 20 0.0217 −64 × 64 50 0.0102 1.01
128 × 128 250 0.0038 1.42
256 × 256 500 0.0021 0.86
512 × 512 1, 250 0.0010 1.07
Remark 3 Although the regularity of the segment { {φ < 0} ∩ {ψ = 0} } is not guaran-teed in the formulation of the energy minimization problem, the Sobolev preconditionerensures sufficient smoothness. In numerical experiments, this seems to contribute to thecontinuity of the segment { {φ > 0} ∩ {ψ = 0} } and thereby allows for the correct angleconfigurations.
Remark 4 Let’s consider the Sobolev preconditioned scheme:
(I − γ )∂φ
∂t= L(φ)
where the semi-discrete form is:
(I − γ h)∂φ
∂t= Lh(φ)+ O(hk)
In the discrete case, since h f = O(h−2) for bounded f , if γ = O(h2+δ) (where0 < δ < k) then the scheme approximates the original equation ∂φ
∂t = L(φ) to O(hδ).Therefore, by taking γ = O(h2+δ) the scheme approximates the original equations, whichmay be of interest in some cases.
5 Experimental Results
The following curve evolution experiments use the Sobolev preconditioned ENO algorithmunless otherwise noted. The calculations are done on a 256 by 256 grid with h = 1
256 or on a512 by 512 grid with h = 1
512 , depending on the configuration. The regularizing parameterfor the Dirac delta and Heaviside approximations is fixed at ε = 5h in the experiments, tohave the contours near the zero level set move. Typical calculations presented in this workfor a 256 by 256 grid take either a few seconds (for the free curve motion cases) or less thana minute (for the free triple junction case) on a 3.33 GHz processor.
123

J Sci Comput
Fig. 2 Various time snapshots of a star-like curve evolving under curvature flow using our Sobolev precon-ditioned ENO scheme. a t = 0, b t = 0.0017, c t = 0.0033, d t = 0.005
Table 2 Star-like curve evolvingwith the non-preconditionedENO algorithm, evaluated at timet = 0.001
Grid size Number of iterations Absolute error Order
32 × 32 20 0.082 −64 × 64 50 0.044 0.91
128 × 128 150 0.027 0.68
256 × 256 300 0.0018 0.59
512 × 512 1, 250 0.0013 0.43
In order to invert the operator I − γ , we discretize the Laplacian using the standard5-point stencil and apply 5 iterations of the conjugate gradient method (CG). It was found thatfaster convergence can be achieved with a preconditioned CG algorithm, but for consistencybetween simulations, no preconditioning of the CG algorithm was used in the results presentedin this paper.
123

J Sci Comput
Table 3 Star-like curve evolvingwith the preconditioned ENOalgorithm, evaluated at timet = 0.001
Grid size Number of iterations Absolute error Order
32 × 32 2 0.088 −64 × 64 5 0.049 0.86
128 × 128 20 0.028 0.81
256 × 256 50 0.0018 0.56
512 × 512 150 0.0013 0.44
Fig. 3 Curve evolution of two free segments with highly oscillatory behavior. a t = 0, b t = 6.7e−4, c t =0.005, d t = 0.01
To determine the numerical effect of the Sobolev preconditioning to the convergence ofour ENO algorithm we follow the experiments in [13]. For pure curvature flow of a circle,the exact radius as a function of time, r(t), can be found. The differential equation for theradius is:
dr(t)
dt= − 1
r(t). (23)
123

J Sci Comput
Fig. 4 Curve evolution of a segment of a star-like shape using two level set functions. Only the segment isdisplayed. a t = 0, b t = 3.3e−4, c t = 6.7e−4, d t = 0.001
Table 4 Star like curve with freeendpoints using a preconditioningparameter of γ = 5h2, calculatedat time t = 0.0015
The errors are measured by the xand y locations of the endpoint
Grid size Number ofiterations
Differencein error, x
Differencein error, y
32 × 32 20 − −64 × 64 50 0.0346 0.010
128 × 128 75 0.0349 0.020
256 × 256 100 0.0058 0.003
512 × 512 350 0.0037 0.002
For a circle centered at (0, 0) with initial radius of 14 , the solution to Eq. (23) is r(t) =√
116 − 2t . Using our preconditioned ENO algorithm, the results in Table 1 shows that the
scheme converges to the correct solution.
123

J Sci Comput
Table 5 Star-like curve with free endpoints using a preconditioning parameter of γ = 2h2 and an infinityLaplacian regularizing parameter of ω = 10−4, calculated at time t = 0.0015
Grid size Number of iterations Difference in error, x Difference in error, y
32 × 32 20 − −64 × 64 50 0.0489 0.0201
128 × 128 75 0.0179 0.0148
256 × 256 100 0.0021 0.0007
512 × 512 150 0.0009 0.00001
The errors are measured by the x and y locations of the endpoint
Table 6 Star like curve with free endpoints evolving with endpoint motion only
Grid size Number of iterations Difference in error, x Difference in error, y
32 × 32 20 − −64 × 64 50 0.0589 0.0178
128 × 128 75 0.0334 0.0177
256 × 256 100 0.0099 0.0081
512 × 512 150 0.0060 0.0054
The algorithm uses a preconditioning parameter of γ = 2h2 and an infinity Laplacian regularizing parameterof ω = 10−4, calculated at time t = 0.0015. The errors are measured by the x and y locations of the endpoint
With γ = O(h2), we see that the preconditioning does not change the underlying dynam-ics. The order is linear, since our discretization is first order.
5.1 Variational Evolution of Curves without Free Endpoints
First, we investigate the evolution of curves without free endpoints, since establishing numer-ical convergence is more direct. In Fig. 2, a star-like curve evolves under pure mean curvatureflow. The motion is qualitatively correct: the smoothing of the kinks first, followed by shrink-age inwards toward a uniform shape.
Quantitatively, the Sobolev preconditioning to the motion in Fig. 2 helps to decreasethe number of iterations by increasing the stability of the scheme. As seen in Tables 2and 3, this comes at a very small error cost (the errors are calculated on the length of theresulting curve). In terms of speed, on a 256 by 256 grid the preconditioned scheme ran 2.4times faster. Therefore, the gains in stability make up for the cost of the conjugate gradientstep.
5.2 Variational Evolution of Segments with Free Endpoints
As a simple example of free endpoint motion, in Fig. 3 a sinusoidal curve made up of twodisjoint segments evolves to minimize its length. In Fig. 3b, the high curvature waves arepulled inwards, while by Fig. 3c, d the interior of the segments have curvature nearly equalto zero. The motion between Fig. 3c, d are dominated by the endpoints.
Figure 4 examines the dynamics of a free segment of the star-like curve. In Fig. 4b the curveevolves to diminish the mean curvature of the segment, while also shrinking the endpointsinward (tangentially). By Fig. 4d, the dominant motion becomes endpoint driven.
123

J Sci Comput
Fig. 5 Level set functions for various algorithms. Notice that the regularized schemes preserve the signdistance nature of the level sets better then the standard scheme. a Initial = φ, b initial = ν, c φ from theinfinity Laplacian regularized ENO scheme, d ν from the infinity Laplacian regularized ENO scheme, e φfrom the Sobolev preconditioned ENO scheme, f ν from the Sobolev preconditioned ENO scheme, g φ fromthe standard ENO scheme, h ν from the standard ENO scheme
123

J Sci Comput
Fig. 6 Curve evolution of a free triple junction using three level set functions. a t = 0, b t = 8.3e−4, c t =0.0017, d t = 0.0025
Table 7 Free triple junction with preconditioning parameter γ = 5h2, calculated at time t = 0.0025
Grid Size Number of iterations Angles Relative error (%)
32 × 32 20 (1.74, 2.25, 2.29) 11.9
64 × 64 35 (1.93, 2.13, 2.22) 5.8
128 × 128 50 (2.04, 2.11, 2.13) 1.8
256 × 256 100 (2.06, 2.08, 2.14) 1.7
512 × 512 150 (2.08, 2.10, 2.10) 0.5
To measure numerical convergence of our algorithm, the endpoints’ locations are cal-culated under grid refinement. For the first test, Table 4 shows that under refinement, thelocations of the endpoints for the star-like curve from Fig. 4 converges. To find the endpointlocation, the intersection points between the two level sets are calculated.
123

J Sci Comput
Fig. 7 Curve evolution of an oscillatory free triple junction using three level set functions. a t = 0, b t = 4e−5,c t = 5e−4, d t = 0.001
Since in some applications [8,35,36] the level set motion is further regularized by theinfinity Laplacian, we investigate the effect of this additional regularizer to the numericalconvergence. To do so we apply our ENO algorithm to the motion of free endpoints equation,where the second level set function is regularized by the infinity Laplacian.
∂φ
∂t= (I − γ )−1
(|∇φ|div
(H(ν)
∇φ|∇φ|
))
∂ν
∂t= (I − γ )−1 (ω ∞ν − δ(ν)δ(φ)|∇φ|) (24)
The infinity Laplacian is defined as ∞ν =⟨ ∇ν|∇ν| , D2ν ∇ν
|∇ν|⟩, for more details see [11,16,23].
For a convergent scheme to the viscosity solution of the infinity Laplacian, see [28].In Table 5, we see better convergence than in Table 4. This is likely due to the signed
distance preservation of the level sets away from the zero contour. In numerical experiments,
123

J Sci Comput
Fig. 8 Zoomed in version of Fig. 7. a t = 0, b t = 4e−5, c t = 5e−4, d t = 0.001
the infinity Laplacian keeps the level set function close to a signed distance function, thustaking the place of reinitialization.
In Table 6, convergence is shown for the star-like segment moving by endpoint motiononly. This is done by keeping φ stationary and evolving ν. Although this does not neces-sarily correspond to a physical motion, we use this example to show the stability of theendpoint motion discretization. In some applications, for example object or target detection,this evolution may be used.
In Fig. 5, we compare the level set functions for the example in Fig. 4. The infin-ity Laplacian with Sobolev preconditioning and the Sobolev preconditioned algorithmskeep the level sets closer to a signed distance function than the non-preconditioned algo-rithm. In particular, the non-preconditioned level sets begins to bunch near the zerolevel set as seen in Fig. 5g, h. Of course, reinitalization can be used to mitigate thiseffect.
123

J Sci Comput
Fig. 9 Triple junction without endpoints evolving with equal length weights. a t = 0, b t = 0.042, c t = 0.0083,d t = 0.0125
5.3 Triple Junctions with Free Endpoints
Figure 6 examines the evolution of a free triple junction with uniform length weights. Sincethe length weights are equal, after some time the angles between the three segments con-verge to 2π
3 (which are the theoretically predicted angles). It should be noted that due tothe regularization of the Heaviside and Dirac functions (namely, the relationship ε > h),we observe some smoothing near the intersection of vertices that form the triple junc-tion. This causes a bias between the angles on coarse grids, which is not the case onfiner grids. In Table 7, we see that the angles converge to the correct configuration underrefinement.
In Fig. 7, we repeat the experiment from Fig. 6 (with the same parameters); however, onesegment of the initial triple junction contains highly oscillatory behavior. In Fig. 7b the seg-ment begins to flatten, leading to Fig. 7c where the curvature is nearly zero on the segments,and in Fig. 7d where the curve is composed of linear segments. Each of the endpoints of
123

J Sci Comput
Table 8 Triple junction withpreconditioning parameterγ = 5h2, calculated at timet = 0.0025
Grid Size Number ofiterations
Angles Relative error (%)
32 × 32 20 (1.78, 2.23, 2.28) 10.8
64 × 64 35 (1.88, 2.19, 2.21) 7.2
128 × 128 50 (2.05, 2.11, 2.13) 1.7
256 × 256 100 (2.06, 2.08, 2.14) 1.6
512 × 512 150 (2.09, 2.10, 2.10) 0.3
Fig. 10 Quadruple junction instability degenerating into two stable triple junctions
the three segments shrink tangentially towards the junction. Once again, we see that underrefinement, the angles converge to the theoretical angles. In Fig. 8, a zoomed in plot of thehighly oscillatory segment is shown.
5.4 Triple Junctions Without Endpoints
In the case of triple junctions without endpoints, the model can include the Area functional.In Fig. 9, the dynamics of a triple junction with equal length weights (l+ = l− = l0 = 1)
123

J Sci Comput
and unequal area weights (a− = a+ = 0 and a0 = 2) is examined. The larger weight inregion Ω0 causes convection of the triple junction toward the Ω0 region (the bottom regionin Fig. 9). We also verify the convergence of the angles for triple junctions with endpointsin Table 8. Since the system is more regular, we see slightly better relative errors than in thefree triple junction case (Table 7).
5.5 Quadruple Junction Instability Example
As a proof of concept, we present an example to show that a quadruple junction does indeedseparate into two stable triple junctions. To simplify the functional, we assume that theweights are all equal, yielding the following Length functional:
L4(φ, ψ, ζ ) =∫ (
|∇ H(φ)| + |∇ H(ψ)|H(φ)+ |∇ H(ζ )|H(−φ))
(25)
As before, the first variation of Eq. (25) is embedded in a dynamic scheme. In Fig. 10, thedynamics of an unstable quadruple junction is calculated on a 100 by 100 grid and we observethe correct separation occurring.
6 Conclusion
We proposed a level set formulation for representing both triple junctions and free triplejunctions. This also provides a capstone to the class of curve structures that can result fromlength minimizing flows. A semi-implicit and ENO algorithm are provided in order to obtainqualitative and quantitative results on the curve evolution. Experimental results on variousconfigurations of junctions and free junctions show correct correspondence to theoreticalresults.
Acknowledgments This research was made possible by the Department of Defense (DoD) through theNational Defense Science and Engineering Graduate Fellowship (NDSEG) and by NSF DMS 1217239. Theauthors would like to thank Selim Esedoglu for his helpful discussion and the reviewers and editor for theiruseful comments. The authors would also like to thank Stanley Osher for his helpful comments.
Appendix: Derivation of the First Variation for Free Triple Junctions
Let φ,ψ, ν ∈ W 1,∞, recall the free triple junction Length function
L f T (φ, ψ, ν) =∫(l+|∇ H(φ)|H(ψ)+ l−|∇ H(φ)|H(−ψ)+ l0|∇ H(ψ)|H(φ)) H(ν)dx
To compute the first variation, let w ∈ W 1,∞ and differentiate the energy with respect toperturbation using these functions. First, to find the minimizer φ, we fix ψ and ν and defineG(ε) := L f T (φ + εw,ψ, ν) and compute G ′(0) = 0.
d
dεG(ε) = d
dε
∫(l+|∇ H(φ + εw)|H(ψ)+ l−|∇ H(φ + εw)|
H(−ψ)+ l0|∇ H(ψ)|H(φ + εw)) H(ν)dx
= d
dε
∫(|∇φ + ε∇w|δ(φ + εw)χ + l0|∇ H(ψ)|H(φ + εw)) H(ν)dx
123

J Sci Comput
=∫ ( ∇φ + ε∇w
|∇φ + ε∇w| · ∇wδ(φ + εw)χ
+|∇φ + ε∇w|δ′(φ + εw)wχ + l0|∇ H(ψ)|δ(φ + εw)w)
H(ν)dx
Next setting ε = 0 and integrating by parts (with ∂φ∂n = 0 on ∂Ω):
G ′(0) =∫ (
−div
(H(ν)δ(φ)χ
∇φ|∇φ|
)+ |∇φ|δ′(φ)χ + l0|∇ H(ψ)|δ(φ)H(ν)
)wdx
=∫ (
−δ(φ)div
(H(ν)χ
∇φ|∇φ|
)+ l0|∇ H(ψ)|δ(φ)H(ν)
)wdx
=∫δ(φ)
(−div
(H(ν)χ
∇φ|∇φ|
)+ l0|∇ H(ψ)|H(ν)
)wdx
Since this holds for all w, the first variation is:
δ(φ)
(−div
(H(ν)χ
∇φ|∇φ|
)+ l0|∇ H(ψ)|H(ν)
)= 0
and can be embedded in a time-dependent descent:
∂φ
∂t= δ(φ)
(div
(H(ν)χ
∇φ|∇φ|
)− l0|∇ H(ψ)|H(ν)
)
Next, to find the minimizer ψ , we fix φ and ν and define G(ε) := L f T (φ, ψ + εw, ν)
and compute G ′(0) = 0 again.
d
dεG(ε) = d
dε
∫(l+|∇ H(φ)|H(ψ + εw)+ l−|∇ H(φ)|H(−ψ + εw)
+l0|∇ H(ψ + εw)|H(φ)) H(ν)dx
= d
dε
∫(l+|∇ H(φ)|H(ψ + εw)+ l−|∇ H(φ)|H(−ψ + εw)
+l0|∇ψ + ε∇w|δ(ψ + εw)H(φ)) H(ν)dx
=∫((l+ − l−) |∇ H(φ)|δ(ψ + εw)w
+l0∇ψ + ε∇w|∇ψ + ε∇w| · ∇w δ(ψ + εw)H(φ)
+l0|∇ψ + ε∇w|δ′(ψ + εw)H(φ)w)
H(ν)dx
Next setting ε = 0 and integrating by parts (with ∂ψ∂n = 0 on ∂Ω)
G ′(0) =∫ (
(l+ − l−) |∇ H(φ)|H(ν)δ(ψ)− l0div
(δ(ψ)H(φ)H(ν)
∇ψ|∇ψ |
)
+l0|∇ψ |δ′(ψ)H(φ))wdx
=∫δ(ψ)
((l+ − l−) |∇ H(φ)|H(ν)− l0div
(H(φ)H(ν)
∇ψ|∇ψ |
))wdx
Since this holds for all w, the first variation with respect to ψ is:
δ(ψ)
((l+ − l−) |∇ H(φ)|H(ν)− l0div
(H(φ)H(ν)
∇ψ|∇ψ |
))= 0
123

J Sci Comput
and can be embedded in a time-dependent descent:
∂ψ
∂t= δ(ψ)
(l0div
(H(φ)H(ν)
∇ψ|∇ψ |
)− (l+ − l−) |∇ H(φ)|H(ν)
)
Lastly, to find the minimizer ν, we may repeat the previous procedure. Note that since interms of ν the functional is:
L f T (φ, ψ, ν) =∫
F(φ, ψ)H(ν)dx = 〈F(φ, ψ), H(ν)〉L2
with F(φ, ψ) = l+|∇ H(φ)|H(ψ) + l−|∇ H(φ)|H(−ψ) + l0|∇ H(ψ)|H(φ), then the firstvariation is 〈F(φ, ψ), δ(ν)〉L2 = 0. Embedding the equation in a descent differential equationyields:
dψ
dt= −δ(ν) (l+|∇ H(φ)|H(ψ)+ l−|∇ H(φ)|H(−ψ)+ l0|∇ H(ψ)|H(φ))
References
1. Almgren, F., Taylor, J., Wang, L.: Curvature-driven flows: a variational approach. SIAM J. Control Optim.31(2), 387–438 (1993)
2. Ambrosio, L., Tortorelli, V.M.: Approximation of functional depending on jumps by elliptic functionalvia t-convergence. Commun. Pure Appl. Math. 43(8), 999–1036 (1990)
3. Bar, L., Sapiro, G.: Generalized Newton-type methods for energy formulations in image processing.SIAM J. Imaging Sci. 2(2), 508 (2009)
4. Bucur, D., Buttazzo, G., Varchon, N.: On the problem of optimal cutting. SIAM J. Optim. 13(1), 157–167(2002)
5. Caselles, R., Kimmel, V., Sapiro, G.: Geodesic active contours. Int. J. Comput. Vis. 22(1), 61–79 (1997)6. Chan, T.F., Sandberg, B.Y., Vese, L.A.: Active contours without edges for vector-valued images. J. Vis.
Commun. Image Represent. 11(2), 130–141 (2000)7. Chan, T.F., Vese, L.A.: Active contours without edges. IEEE Trans. Image Process. 10(2), 266–277 (2001)8. Chung, G., Vese, L.A.: Energy minimization based segmentation and denoising using a multilayer level set
approach. In: Energy Minimization Methods in Computer Vision and Pattern Recognition, pp. 439–455.Springer, Berlin (2005)
9. Cohen, L.D., Kimmel, R.: Global minimum for active contour models: a minimal path approach. Int. J.Comput. Vis. 24(1), 57–78 (1997)
10. Concus, P., Golub, G.H.: Use of fast direct methods for the efficient numerical solution of nonseparableelliptic equations. SIAM J. Numer. Anal. 10(6), 1103–1120 (1973)
11. Crandall, M.G., Evans, L.C., Gariepy, R.F.: Optimal lipschitz extensions and the infinity laplacian. Calc.Var. Partial Differ. Equ. 13(2), 123–139 (2001)
12. Dal Maso, G., Toader, R.: A model for the quasi-static growth of brittle fractures based on local mini-mization. ArXiv Mathematics e-prints, June (2002)
13. Esedoglu, S., Ruuth, S., Tsai, R.: Diffusion generated motion using signed distance functions. J. Comput.Phys. 229(4), 1017–1042 (2010)
14. Esedoglu, S., Smereka, P.: A variational formulation for a level set representation of multiphase flow andarea preserving curvature flow. Commun. Math. Sci. 6(1), 125–148 (2008)
15. Evans, L.C., Gariepy, R.F.: Measure Theory and Fine Properties of Functions. CRC Press, Boca Raton,FL (1992)
16. Evans, L.C., Yu, Y.: Various properties of solutions of the Infinity-Laplacian equation. Commun. PartialDiffer. Equ. 30(9), 1401–1428 (2005)
17. Jung, M., Chung, G., Sundaramoorthi, G., Vese, L.A., Yuille, A.L.: Sobolev gradients and joint variationalimage segmentation, denoising, and deblurring. Proc. SPIE, 7246(1), 72460I–72460I-13 (2009)
18. Kass, M., Witkin, A., Terzopoulos, D.: Snakes: active contour models. Int. J. Comput. Vis. 1(4), 321–331(1988)
19. Kimmel, R., Bruckstein, A.M.: Regularized laplacian zero crossings as optimal edge integrators. Int. J.Comput. Vis. 53, 225–243 (2001)
20. Lacoste, C., Descombes, X., Zerubia, J.: Unsupervised line network extraction in remote sensing using apolyline process. Pattern Recogn. 43(4), 1631–1641 (2010)
123

J Sci Comput
21. Larsen, C.J., Richardson, C.L., Sarkis, M.: A level set method for the mumford -Shah functional andfracture. Preprint serie A, Instituto Nacional de Matemática Pura e Aplicada, Brazilian Ministry forScience and Technology (2008)
22. Li, H., X-C T.: Piecewise constant level set methods for multiphase motion. Int. J. Numer. Anal. Mod.4(2), 291–305 (2007)
23. Lu, G., Wang, P.: Inhomogeneous infinity laplace equation. Adv. Math. 217(4), 1838–1868 (2008)24. Melonakos, J., Pichon, E., Angenent, S., Tannenbaum, A.: Finsler active contours. Pattern Anal. Mach.
Intell. IEEE Trans. 30(3), 412–423 (2008)25. Merriman, B., Bence, J.K., Osher, S.J.: Motion of multiple junctions: a level set approach. J. Comput.
Phys. 112(2), 334–363 (1994)26. Mumford, D., Shah, J.: Optimal approximations by piecewise smooth functions and associated variational
problems. Commun. Pure Appl. Math. 42(5), 577–685 (1989)27. Neuberger, J.W.: Sobolev Gradients and Differential Equations. Springer, Berlin (2009)28. Oberman, A.M.: A convergent difference scheme for the infinity laplacian: construction of absolutely
minimizing lipschitz extensions. Math. Comput. 74(251), 1217–1230 (2004)29. Osher, S., Sethian, J.A.: Fronts propagating with curvature-dependent speed: algorithms based on
Hamilton-Jacobi formulations. J. Comput. Phys. 79(1), 12–49 (1988)30. Reitich, F., Soner, H.M.: Three-phase boundary motion under constant velocities i: the vanishing surface
tension limit. Proc. R. Soc. Edinb. 126A, 837–865 (1997)31. Renka, R.J.: A simple explanation of the sobolev gradient method (2006). http://www.cse.unt.edu/~renka/
papers/sobolev.pdf32. Richardson, W.B.: Sobolev gradient preconditioning for image-processing PDEs. Commun. Numer. Meth-
ods Eng. 24(6), 493–504 (2006)33. Ruuth, S.J.: A diffusion-generated approach to multiphase motion. J. Comput. Phys. 145(1), 166–192
(1998)34. Ruuth, S.J.: Efficient algorithms for diffusion-generated motion by mean curvature. J. Comput. Phys.
144(2), 603–625 (1998)35. Schaeffer, H.: Active arcs and contours. UCLA CAM Report, pp. 12–54 (2012)36. Schaeffer, H., Vese, L.: Active contours with free endpoints. J. Math. Imaging Vis. (2013). doi:10.1007/
s10851-013-0437-437. Smereka, P.: Spiral crystal growth. Phys. D Nonlinear Phenom. 138(3–4), 282–301 (2000)38. Smereka, P.: Semi-implicit level set methods for curvature and surface diffusion motion (english). J. Sci.
Comput. 19(1–3), 439–456 (2003)39. Smith, K.A., Solis, F.J., Chopp, D.: A projection method for motion of triple junctions by level sets.
Interfaces Free Boundaries 4(3), 263–276 (2002)40. Sundaramoorthi, G., Yezzi, A., Mennucci, A.C.: Sobolev active contours. Int. J. Comput. Vis. 73(3),
345–366 (2007)41. Sussman, M., Smereka, P., Osher, S.: A level set approach for computing solutions to incompressible
two-phase flow. J. Comput. Phys. 114(1), 146–159 (1994)42. Taylor, J.E.: A variational approach to crystalline triple-junction motion. J. Stat. Phys. 95, 1221–1244
(1999). doi:10.1023/A:100452300544243. Taylor, J.E.: The motion of multiple-phase junctions under prescribed phase-boundary velocities. J. Differ.
Equ. 119(1), 109–136 (1995)44. Vese, L.A., Chan, T.F.: A multiphase level set framework for image segmentation using the mumford and
shah model. Int. J. Comput. Vis. 50(3), 271–293 (2002)45. Zhao, H.-K., Chan, T., Merriman, B., Osher, S.: A variational level set approach to multiphase motion.
J. Comput. Phys. 127(1), 179–195 (1996)
123