Università degli Studi di Milano-Bicoccafalqui/dottorato/2006-2007.pdf · Geometric Methods in the...
68
Geometric Methods in the Theory of Integrable PDEs A Ph. D. Course Gregorio Falqui, Dipartimento di Matematica ed Applicazioni, Universit`a di Milano-Bicocca, via R. Cozzi, 53, 20125 Milano DISCLAIMER These notes are currently (January 24, 2007) at a very preliminary stage. As such they are intended for distribution to the attendees of the Ph. D. course which is being held at Milano-Bicocca. Contents 1 Hamiltonian systems 2 1.1 Prelimaries ............................. 2 2 Lezione 5/6: Formulazione intrinseca delle equazioni E-L e H. Variet` a simplettiche 4 3 Lie algebras and Lie groups: a primer 8 3.1 Lie Algebras ............................. 8 3.2 Lie groups .............................. 10 4 Lie Poisson brackets 12 5 Poisson maps and canonical coordinate transformations 15 6 Liouville Integrable Systems 15 6.1 Action-Angle variables ....................... 18 7 Lax Pairs 19 7.1 The Toda System .......................... 22 8 Lax equations with ‘spectral’ parameter 26 9 The KdV Equation 29 9.1 Elementary solutions ........................ 30 9.2 Lax representation and Inverse Scattering ............ 32 9.3 The Scattering Data ........................ 32 10 The Inverse Spectral Transform 41 11 The GLM equation 44 1
Transcript of Università degli Studi di Milano-Bicoccafalqui/dottorato/2006-2007.pdf · Geometric Methods in the...

Geometric Methods in the Theory ofIntegrable PDEs
A Ph. D. CourseGregorio Falqui, Dipartimento di Matematica ed Applicazioni, Universita di
Milano-Bicocca, via R. Cozzi, 53, 20125 Milano
DISCLAIMERThese notes are currently (January 24, 2007) at a very preliminary stage. Assuch they are intended for distribution to the attendees of the Ph. D. coursewhich is being held at Milano-Bicocca.
Contents
1 Hamiltonian systems 21.1 Prelimaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Lezione 5/6: Formulazione intrinseca delle equazioni E-L e H.Varieta simplettiche 4
3 Lie algebras and Lie groups: a primer 83.1 Lie Algebras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2 Lie groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Lie Poisson brackets 12
5 Poisson maps and canonical coordinate transformations 15
6 Liouville Integrable Systems 156.1 Action-Angle variables . . . . . . . . . . . . . . . . . . . . . . . 18
7 Lax Pairs 197.1 The Toda System . . . . . . . . . . . . . . . . . . . . . . . . . . 22
8 Lax equations with ‘spectral’ parameter 26
9 The KdV Equation 299.1 Elementary solutions . . . . . . . . . . . . . . . . . . . . . . . . 309.2 Lax representation and Inverse Scattering . . . . . . . . . . . . 329.3 The Scattering Data . . . . . . . . . . . . . . . . . . . . . . . . 32
10 The Inverse Spectral Transform 41
11 The GLM equation 44
1

12 The time evolution 47
13 Reflectionless potentials and n-soliton solutions 49
14 Periodic Potentials 5314.1 The spectral problem for the Hill’s equation . . . . . . . . . . . 56
15 Complete integrability of KdV 5915.1 Hamiltonian structure(s) of KdV . . . . . . . . . . . . . . . . . 6215.2 The bihamiltonian structure of KdV . . . . . . . . . . . . . . . 6415.3 Schouten brackets and bihamiltonian manifold . . . . . . . . . . 65
1 Hamiltonian systems
1.1 Prelimaries
We start by the local definition of the Hamilton equations of motion. Let Ω ⊂R2n and let q1, . . . , qn, p1, . . . , pn coordinates in Ω. Let H be a (sufficientlyregular, say C∞)) function on Ω, so thatH = H(pi, q
i). The Hamilton equationsare
pi = −∂H∂qi
qi =∂H
∂pi
i = 1, . . . , 2n. (1.1) eq:1.1
Along with this structure we introduce the Poisson brackets between two func-tions F,G ∈ C∞(Ω) by
F,G =
n∑
i
∂F
∂qi
∂G
∂pi
− ∂F
∂pi
∂G
∂qi. (1.2) eq:1.2
In particular for the coordinate functions q1, . . . , qn, p1, . . . , pn we have thefundamental Poisson brackets:
qi, pj = −pj , qi,=δi
j, qi, qjpi, pj = 0. (1.3) eq:1.3
The structural properties of the Poisson brackets (eq:1.21.2) are:
1. Bilinearity and antisymmetry:
F,G = −G,F; a1F1+a2F2, G = a1F1, G+a2F2, G, ai constants.
2. Leibnitz rule:F1F2, G = F1F2, G + F2F1, G.
3. Jacobi identity:
F,G, , H+ G,H, , F+ H,F, , G = 0
2

The Hamilton equations of motion (eq:1.11.1) can be rewritten as
pi = −∂H∂qi
= pi, H
qi =∂H
∂pi
= qi, Hi = 1, . . . , 2n. (1.4) eq:1.4
and, collectively, setting x1, . . . , x2n = q1, . . . , qn, p1, . . . , pn via
xa = xa, H, a = 1, . . . , 2n. (1.5) eq:1.5
Historically, the canonical form (eq:1.11.1) arises from the Lagrangian formulation of
the Newton equation of motion for systems with smooth constraints satisfyingthe so-called D’Alembert principle, in which one has a Lagrangian functionL(q, q), and defines, on the space of paths γ : [0, 1] → Ω, γ(0) = q0, γ(1) = q1with endpoints in two fixed points q0, q1 of Ω the action functional
S =
∫
γ
L(q, q)dt
The differential of S is
∑
i
∫
γ
(∂L
∂qi− d
dt
∂L
∂qi· hi)dt
where qi → qi + hi denotes the variation of the path γ. Hence the extrema of Swill be those paths satisfyng the Euler-lagrange equations
∂L
∂qi− d
dt
∂L
∂qi= 0, i = 1, . . . n. (1.6) eq:1.7
To obtain the canonical equations (eq:1.11.1) one argues as follows. One supposes
that the Legendre transformation
pi =∂L
∂qi(1.7) eq:1.8
is invertible w.r.t. the qi, i.e. it is possible to get from the transformation (eq:1.81.7)
qi = qi(q, p)
Then introduces the Hamiltonian (energy) function defined by the Lagrangianas
H(p, q) =∑
i
piqi − L(q, q)|qi=qi(q,p). (1.8) eq:1.9
It is a straightforward computation to show that the system of n second orderdifferential equations (
eq:1.71.6) is equivalemt to the canonical Hamilton equations
(eq:1.11.1).
3

Conversely (taking into account that the Legendre transformation for convexfunctions is involutive) starting from the definitions
qi =∂H
∂pi
, , L =∑
qipi −H(p, q)|qi=
∂H
∂pi
one recovers, starting from (eq:1.11.1) the E-L equations (
eq:1.71.6).
2 Lezione 5/6: Formulazione intrinseca delle
equazioni E-L e H. Varieta simplettiche
Voglaimo ora brevemente come la trattazione/derivazione euristica delle equazionidi Eulero-Lagrange (e di Hamilton) possa inserirsi nel quadro geometrico cheabbiamo, seppure per sommi capi, delineato.
Sostanzialmente si tratta di tradurre:
1. Gradi di liberta e coordinate libere: “Lo stato di un sistema di particellecon vincoli lisci .... a m gradi di lberta e parametrizzato biunivocamenteda una varieta differenziale Q, di dimensione m che assumiamo liscia apiacere”.
2. Il vincolo (esprimibile da equazioni parametriche xi = xi(qα)) definisceuna mappa liscia da Q in R3n, dove n e il numero di particelle.
3. La velocita virtuale (o spostamento virtuale) di un punto e un qualunquevettore (di TR3n) che sta nell’immagine della mappa tangente alla q →x(q). Questo e il significato di
xi =∂xi
∂qαqα
4. Fissata una qualsiasi carta q1, . . . , qm , siano (qα, ηα) coordinate fibrate.Ovvero, la trasformazione (q, η) in (q, η) e data da
q = q(q), η =∂q
∂q(q)η (2.1) eq:qui
Consideriamo la funzione L = T −U |x(q) = |locL(qi, ηi); allora le equazionidi Newton del sistema si scrivono come
dq
dt= η;
d
dt
∂L
∂η− ∂L
∂q= 0 (2.2) eq:la-n
4

5. Supponiamo ora che (anche se non e del tutto necessario) che, esplicita-mente, si abbia
L =1
2G(q)(η, η) − V (q) =
1
2gij(q)η
iηj − V (q), condetgij 6= 0.
Restringiamo L ad una fibra di π : TQ → Q, diciamo π−1(q0) e notiamoche la funzione indotta L|q0
e - a meno della costante V (q0)una formaquadratica non degenere su Tq0
Q. Quindi
G(q0)(η, ·)
si puo vedere come un elemento del duale T ∗q0Q e, dato che G(q0) e sup-
posta invertibile, ed e palesemante lineare, questa definisce un isomorfismo(lineare, perche G(q0) e quadratica) tra TQ e T ∗Q; in particolare, dato che(qi, etai) sono coordinate fibrate in TQ, allora la (prima) equazione defin-itoria della trasfromazione di Legendre, cioe
pi =∂L
∂ηi
fa vedere che (qi, pi) sono coordinate fibrate in T ∗Q. Quindi questo portaa vedere le equazioni di Hamilton
qi =∂H
∂pi
p = −∂H∂qi
, H = p∂L
∂η− L(q, η)|η=η(q,p)
come un flusso (cioe un campo vettoriale) sul cotangente a Q.
Il carattere intrinseco dell equazioni di Hamilton si evince dalle seguenticonsiderazioni.
Il fibrato cotangente ad una varieta Q viene naturalmente equipaggiato diuna 1-forma (che si chiama forma di Liouville) definita intrinsecamente in questomodo.
Un punto ξ ∈ T ∗Q e una coppia q ∈ Q, p ∈ T ∗q Q. A questo punto devo asso-
ciare una applicazione lineare da Tξ(TQ) → R. Considero il seguente diagamma
di mappe:Π : T (T ∗Q) → T ∗Q
σ∗ ↓ ↓ σ
π : TQ → Q
(2.3) eq:diagra
Allora definisco< θ,X >=< Π(ξ), σ∗(X) >
La chiamo forma di Liouville.
5

Questo e un oggetto ben noto; Se metto coordinate fibrate (p, q) in T ∗Q, percui (p, q) rappresenta la 1-forma pdq, potro scrivere
X =∑
Xp
∂
∂p+Xq
∂
∂q, θ = θpdp+ θqdq.
Dato che σ(p, q) = q,
σ∗(X) = Xq
∂
∂q
Quindi, < Π(θ), σ∗(X) >= pXq. Ovvero, in coordinate
θ =∑
i
pidqi
L’oggetto sul quale si punta ulteriormente l’attenzione e la 2-forma
ω = dθ
Le proprieta fondamentali di ω sono due:
1. ω e chiusa, dω = 0
2. ω e non degenere, cioe vale che
ω(X, Y ) = 0 ∀Y ⇒ X = 0
La prima proprieta segue banalmente dal fatto che ω = dθ e d · d = 0.La seconda proprieta‘si dimostra nel seguente modo. Conviene passare in
coordinate locali e ragionare in analogia con le metriche.Consideriamo la mappa
iX : ∧2(M) → ∧1(M), iXω(Y ) = ΩX(Y ) = ω(X, Y ) (2.4) eq:Oo
e supponiamo che esista X tale che ω(X, Y ) = 0 ∀Y . Questo vuol dire cheiXω = ΩX e la 1-forma identicamente nulla.
In coordinate ho
ΩX = (ΩX)idxi =
∑
j
ΩjiXjdxi, dove X =
∑
j
Xj ∂
∂xj(2.5) eq:omx
e dunque si avrebbe che la n-upla X i definisce un elemento del nucleo della“matrice” ωij. Quindi, CNS affinche esista un tale X non nullo e che
detωij = 0 (2.6) eq:nondeg
Ora, ω =∑
i dpi ∧ dqi (in coordinate fibrate), e data da
ωij =
(0 I−I 0
)(2.7) eq:matform-om
6

e dunque Detωij = 1.Nota Abbiamo visto - anche se forse implicitamente - che in ogni carta
fibrata di T ∗(Q) ω assume la forma dpi∧dqi; in particolare si vede che det(ωij) =1 in ogni carta siffatta (o aperti threreof). In effetti, il determinante di una 2-forma non e una quantita scalare, dato che, per arbitrari cambi di coordinatesi ha
detω′ij = detJ−2detωij
D’altra parte, si vede che lo statement det(ω) 6= 0 e ben posto.Il significato di questa proprieta e il seguente (e fondamentale).Interpretando opportunamente gli indici tensoriali, vediamo che la due-forma
ω da luogo, tramite (eq:Oo2.4) ad una mappa
Ω : TM → T ∗MX → ΩX t.c. ΩX(Y ) = ω(X, Y )
(2.8) eq:oo
La proprieta di non degenerazione dice che la mappa Ω e invertibile, ovverodefinisce una applicazione, che chiameremo −P , che associa ad 1-forme campivettoriali, i.e.,
P : T ∗M → TM, i.e. P ∈ Hom(T ∗M,TM) ≃ TM⊗2
Ora, notiamo che dalla ovvia proprieta ΩX(Y ) = −ΩY (X) segue che
< α, Pβ >= − < β, Pα >, ∀ α, β, i.e. P ∈ ∧2(TM).
Come ulteriore check, controlliamo, come si era detto la volta scorsa, la linearitasu C∞(M). Ora, siano X, Y campi vettoriali e f una funzione:
ΩfX(Y ) = ω(fX, Y ) = fω(X, Y ) = fΩX(Y ) → ΩfX = fΩX
e dunqueP (fα) = fPα.
Infatti,
fX = −PΩfX = −P (fΩX)
fX = f(−PΩ(X)) ⇒ dato che Ω e onto P (fα) = fPα, ∀α, f.
In coordinate locali xi, abbiamo, se ω = ωijdxi ∧ dxj , allora
P = P ij ∂
∂xi∧ ∂
∂xj, con P ij = [ω−1]ij (2.9) eq:Ploc
Prova. Per ogni X =∑
j Xj∂
∂xjdeve valere X = −PΩX dunque
X i = −∑
k
P ik(ΩX)k = per la (eq:omx2.5) = −
∑
k,j
P ikωjkXj =
∑
k,j
P ikωkjXj
7

da cui la tesi.L’operatore P (che verra chiamato bivettore di Poisson associato (o definito
da) alla due forma ω) e un oggetto ben noto nella teoria delle equazioni diHamilton. Infatti, tenendo conto della rappresentazione in coordinate fibratezi = p1, . . . , qn data da (
eq:matform-om2.7) di ω si ha che
P = P ij ∂
∂zi∧ ∂
∂zj, P ij =
(0 −II 0
)(2.10) eq:matform-P
Quindi se considero una funzione H(p, q), il campo vettoriale associato da P al
differenziale dH =∑
i
∂H
∂pidpi +
∂H
∂qidqi e dato da ξi
∂
∂pi+ ηi ∂
∂qi, con
ξi = −∂H∂qi
ηi =∂H
∂pi
⇔
pi = −∂H∂qi
qi =∂H
∂pi
(2.11) eq:hvf
Definizione Una varieta simplettica (M,ω) e una varieta differenziabiledotata di una due-forma simplettica, cioe chiusa (dω = 0) e non-degenere(ovvero, ∀m ∈M,ω|TmM e non degenere).
3 Lie algebras and Lie groups: a primer
In this Section we will collect a few of the basic notions of the theory of Liegroups and algebras.
3.1 Lie Algebras
We already introduced the notion of Lie algebra by considering vector filedson manifolds, and the space C∞(M) endowed with the Poisson brackets. Theformal definition is the following:
defalglie Definition 3.1 A Lie algebra g is a vector space over R(or C endowed with aproduct [·, ·], that is a bilinear operation g × g → g satisfying
1. Antisymmetry: [X, Y ] = −[Y,X], ∀X, Y ∈ g
2. Jacobi identity: [[X, Y ], Z] + [[Y, Z], X] + [[Z,X], Y ] = 0 ∀X.Y.Z. ∈ g
We notice the following: any associative algebra endowed with the associativeproduct A,B → A · B can be turned into a Lie algebra setting
[A,B] := A · B − B · A. (3.1) eq:4.1
In this way the sapce of endomorphisms of a vector space can be seen as a Liealgebra, and the space of n× n matrices with entries in R is a Lie algebra.
8

If g and h are Lie algebras, a homomrphism of g to h is a linear map L : g → h
such that[L(X1), L(X2)]h = L([X1, X2]g), ∀X1, X2 ∈ g. (3.2) eq:4.2
We have already encountered an example of Lie algebra homomorphism. Indeed,if M and M ′ are manifolds, and F : M →M ′ is an injective C∞ map, then wehave seen that, for the tangent map F∗ it holds
[F∗X,F∗Y ] = LF∗XF∗Y = F∗(LXY ) = F∗([X, Y ]).
That is, given any injective map (in particular, a diffeomorphism) betweentwo manifolds, the tangent map gives rise to a homomorphism Vect(M) →Vect(M ′).
Let us now turn our attention to finite dimensional Lie algebras. A notionwhich will be used in the sequel is that of structure constants. Namely, let g
be an n-dimensional Lie algebra, and let X1, . . . , Xn be a basis (w.r.t. thevector space structure) of g. Then the (Lie) product of two elements Y, Z of g
is determined by the (Lie) products of the basis elements. Since [X i, Xj] ∈ g
it can be uniquely developped along the basis X1, . . . , Xn that is, there existn3 numbers cijk such that
[X i, Xk] =∑
k
cijk Xk. (3.3) eq:4.3
These numbers are the structure constants of the Lie algebra g, corresponding tothe basis X1, . . . , Xn. We notice that, fo all i, j, k and all bases we necessarilyhave, in correspondence with the axioms 1 and 2 of Definition
defalglie3.1,
cijk = −cjik .∑
m
(cijmc
mkl + cjkmc
mil + cki
mcmjl
)= 0 (3.4) eq:4.4b
Remark. (Trivial) Any vector space V can be turned into a (somewhat unin-teresting) Lie algebra. Namely, one can define
[v1, v2] = 0, ∀v1, v2 ∈ V.
This is an instance of a commutative Lie algebras. Much more interesting isthe determination of (maximal) commutative subalgebras of a given Lie alge-bra g (this leads to the Cartan-Dynkin classification scheme for simpe finitedimensional Lie algebras.
Example. Let us consider the space of (complex) 2 × 2 matrices M2(C).The space sl(2,C) can be (for instance) endowed with the following two bases:
h =
(1 00 −1
)= X3, e =
(0 10 0
)= X1, f =
(0 01 0
)= X2 (Cartan base)
(3.5) eq:4.4
9

and
σ1 =1
2
(0 −11 0
), σ2 =
1
2
(0 II 0
), σ3 =
1
2
(I 00 −I
)(Pauli base) (3.6) eq:4.5
The commutation relations in the two bases are:
[X1, X2] = [e, f ] = h = X3, [X1, X3] = [e, h] = −2e = −2X1,
[X2, X3] = [f, h] = 2f = 2X2, ⇒ c123 = 1, c131 = −2, c232 = 2 (3.7) eq:4.6
and
[σ1, σ2] = σ3, [σ2, σ3] = σ1, [σ3, σ1] = σ2
⇒ c123 = c231 = c312 = 1 (3.8) eq:4.7
So we see that the structure constants in the two bases differ. Clearly, they arerelated by the consequnce of the relations
σ3 =−I2X3, σ1 =
1
2(f − e) σ2 =
−I2
(e+ f)
We finally remark that σ1, σ2, σ3 are a basis in the real Lie algebra su(2) of thetraceless antiselfadjoint 2× 2 matrices, that is those 2× 2 matrices A satisfying
A† ≡ T A = −A, Tr(A) = 0. (3.9) eq:4.8
Proposition 3.2 The Lie algebra su(2) is isomorphic to the Lie algebra so(3)of real 3 × 3 antisymmetric matrices.
Proof. A base in so(3) is given by
Ω1 =
0 0 00 0 −10 1 0
, Ω2 =
0 0 10 0 0−1 0 0
, Ω3 =
0 −1 01 0 00 0 0
. (3.10) eq:4.9
A straightforward computation shows that the commutation rules between theelements of such a basis are:
[Ω1,Ω2] = Ω3, [Ω2,Ω3] = Ω1, [Ω3,Ω1] = Ω2, (3.11) eq:4.9b
that is, they coincide with those given by (eq:4.73.8)
3.2 Lie groups
Definition 3.3 A Lie group is a group G endowed with the structure of a dif-ferentiable manifold, such that the maps
G×G → G(g1, g2) 7→ g1 g2
andG → Gg 7→ g−1 (3.12) eq:4.10
are smooth (sometimes required to be analytic). Clearly, the differential struc-ture on G×G s the product one.
10

An equivalent definition is that the map
G×G → G(g, h) 7→ g h−1 (3.13) eq:4.11
be smooth (analytic).Remark. By definition a Lie Group G is a manifold equipped with a dis-
tinguished set (indeed it is the manifold G itself) of diffeomorphisms. Indeed,if we consider the first “half” of the definition of a Lie group, we have a mapdefined on the Cartesian product G×G → G. If we “freeze” the first entry tog1 = h, we obtain a map
φh : G → Gg 7→ φh(g) = h g.
(3.14) eq:4.12
This map is smooth by definition, and is invertible (the inverse is φh−1.
Definition 3.4 A vector field X on G is called left-invariant if, for all h, g ∈ G,
(φh)∗X(g) = X(φh(g)) = X(hg). (3.15) eq:4.13
11

4 Lie Poisson bracketslpbr
Let g be a (finite dimensional) Lie algebra, endowed with a basis E1, . . . , Enand let cijk be its structure constant. Let us consider Rn with euclidean coor-dinates x1, . . . , xn. Let us define in Rn the following brackets
xi, xj :=∑
k
cijkxk. (4.1) eq:55.1
Proposition 4.1 The brackets (eq:55.14.1) are indeed Poisson brackets.
Proof. Antisymmetry is obvious. The characteristic condition
xi, xj , xk + cyclic = 0 (4.2) eq:55.2
is equivalent to the characteristic property of the structure constants of g.Let now g be reductive, that is let us suppose that an ad-invariant non-
degenerate inner productg : g × g → R(C), (4.3) eq:55.3
that is a symmetric non-degenerate bilinear form g(X, Y ) s.t.
g([X, Y ], Z) = g(X, [Y, Z]), ∀X, Y, Z,∈ g. (4.4) eq:55.4
In terms of the structure constants we have, calling gij = g(Ei, Ej),
g(
P
l cijlE
l
︷ ︸︸ ︷[Ei, Ej], Ek ) = g(Ei,
P
l cjklE
l
︷ ︸︸ ︷[Ej, Ek])
|| ||∑l c
ijl g(E
l, Ek) =∑
l cjk
l g(Ei, El)
|| ||γijk :=
∑l c
ijlg
lk =∑
l cjk
lgli =: γjki
(4.5) eq:55.5
Thus, taking into account the obvious antisymmetry relation γijk = −γjik wecan state:
Proposition 4.2 The completely contravariant structure constants γijk of a re-ductive Lie algebra are completely antisymmetric w.r.t. permutation of indices.
This property will allow us to give a remarkable characterization of the Hamil-tonian vector fields generated by the brackets (
eq:55.14.1).
Before examining this, let us first give an example of Hamiltonian vectorfield with respect to these structures. Let us consider so(3), endowed with thebasis (
eq:4.93.10), that is with the structre constants cijk = ǫijk. The Poisson tensor,
in the cartesian coordinates x, y, z, is represented by the matrix
P =
0 z −y−z 0 xy −x 0
(4.6) eq:55.a
12

............................
Let us now turn to the general properties of these linesar Poisson brackets.Let H be a function on Rn; then XH = P dH is expressed by
xi = xi, H =∑
l
xi, xl∂lH =∑
lk
cilk xk ∂lH. (4.7) eq:55.6
Let us introduce two g-valued functions on Rn as follow:
X =∑
in
ginxiEn, ∇H =
∑
l
∂l HEl, gilg
lk = δki . (4.8) eq:55.7
From (eq:55.64.7) we have:
X =∑
in
ginxiEn =
∑
inkl
gincil
k xk ∂lHE
n . (4.9) eq:55.8
On the other hand, let us compute the commutator [∇H,X], as
[∇H,X] = [∑
l
∂l HEl,∑
in
ginxiEn]
=∑
inl
∂l H xigin[El, En] =∑
inlk
∂l H xigincln
kEk.
(4.10) eq:55.9
Let us change a few indices in the last equation, namely first i↔ k to get
∑
inlk
∂l H xkgkncln
iEi.
and then i↔ n. This yields
[∇H,X] =∑
inlk
gkicli
n(∂l H xkEn), (4.11) eq:55.11
to be compared with (eq:55.84.9), i.e.,
X =∑
inkl
(xk ∂lHEn)ginc
ilk . (4.12) eq:55.12
We want to prove that
∑
i
gkicli
n =∑
i
gincil
k, ∀l, k, n.
We multiply both sides by gmkgns to get, implicitly unserstanding summationover repated indices
gmkgkicli
ngns = gnsginc
ilkg
mk
13

Taking into account the symmetry gab = gba, gab = gba we have:
δmi︷ ︸︸ ︷
gmkgki
γlis
︷ ︸︸ ︷cling
ns versus
δsi︷ ︸︸ ︷
gnsgin
γilm
︷ ︸︸ ︷cilkg
mk
|| ||γlms versus γslm,
(4.13) eq:5.13
which is the equality (eq:55.54.5). We have thus proven:
Proposition 4.3 The Hamiltonian vector fields on Rn, equipped with the Pois-son brackets (
eq:55.14.1) admit the formulation, called Lax formulation
X = [∇H,X]
Definition 4.4 Let H =∑
ij Bijxixj. The Hamilton equation associate with H
are quadratic equations in the xi’s that are called Euler equations on g, meaningthat
X = [∇H,X], ∇H =∑
ij
BijxiEj . (4.14) eq:55.14
Let us turn to discuss the intrinsic meaning of these Poisson brackets. Let Fand G be functions on the dula space g. On C∞(g∗) we can naturally definea bracket as follows, called Lie-Poisson(-Kostant-Kirillov) bracket. We startnoticing that if
F,G : g∗ → R(C)
then dF |α is, for every α an element of Hom(g∗,R(C)
)), that is an element of
the double dual g∗∗, i.e., can be naturally identified with an element of g. Sewe define
F,G(α) =< α, [dF |α, dG|α] > . (4.15) eq:55.15
In particular, let us put on g∗ coordinates x1, . . . , xn obtained considering thebasis Ei in g and developing α on teh dual basis ǫi, i.e.:
α =∑
i
xi(α)ǫi, < ǫi, Ej >= δj
i . (4.16) eq:55.16
So we see that, setting as it follows from the definition of xi,
dF |α =∑
l
∂F
∂xlEl, dG|α =
∑
l
∂G
∂xlEl,
14

we get
F,G =<∑
i
xiǫi, [∑
l
∂F
∂xlEl,∑
k
∂G
∂xkEk >
=∑
ilk
xi ∂F
∂xl
∂G
∂xk< ǫi, [E
l, Ek] >
=∑
ilkm
xi ∂F
∂xl
∂G
∂xkclkm< ǫi, E
m >︸ ︷︷ ︸δmi
=∑
lkm
xm ∂F
∂xl
∂G
∂xkclkm
(4.17) eq:5.17
which is indeed what we get from the definition (eq:55.14.1).
5 Poisson maps and canonical coordinate trans-
formations
6 Liouville Integrable Systems
Let us consider a system XH endowed with n = 12dim(M) mutually commuting
functionally independent integrals of the motion f1(p, q), . . . , fn(p, q). Weshall show that in this situation it is possible (let us say, in principle), to define agenerating function of a canonical transformation that sends p, q into anotherset of canonical coordinates, whose first set is exactly the set f1, . . . , fn.
The key to understand this property is the geometry of the situation, asdepicted in Figure 2.
In the open set U where df1 ∧ df2 . . . dfn 6= 0 define a foliation of M , whoseleaves Sc are the common level surface of the f1(p, q), . . . , fn(p, q), that is thesubmanifolds defined by the equations
f1(p, q) = c1, . . . , fn(p, q) = cn, ci ∈ V ⊂ Rn. (6.1) eq:l1
That is, we have defined a map
πF : U → V, π(p, q) = (f1(p, q), . . . , fn(p, q). (6.2) eq:l2.1
Let us momentarily fix a (smooth) section of this map, that is, a functionσ0 : V → U s.t. fi(σ0(p), σ0(q)) = ci, i = 1, . . . , n, and, for all m = (p, q) ∈ Udefine an “object” according to the following recipe:
1. Determine to which leaf Sc m belongs, i.e., compute the values ci = fi(m).
2. Consider the point m0 = σ0(c), and a path γ in Sc joining m0 and m.
15

Figure 1: The Geometry
p
q
i f
m(q,f)
q(m) q
0
γ
0
f(p,q)=f
f
m(q,f)
3. Compute
S(m; σ0; γ) :=
∫
γ
θL. (6.3) eq:l1.2
What we want to show is that S is, whenever one fixes σ0 a “(possibly multi-valued) function” of m. This means that, if γ′ is another path joining m0 to m,that can be continuously deformed to γ in Sc, then
S(m; σ0; γ) = S(m; σ0; γ′). (6.4) eq:l1.3
Remark that the above condition means that, if γ and γ′ are parametrizedas γ(t), γ′(t), t ∈ [0, 1] then there exists a continuous map
F : [0, 1] × [0, 1] → Sc, s.t.F (t, 0) = γ(t), F (t, 1) = γ′(t), ∀ t. (6.5) eq:l1.4
Actually this holds true thanks to the involutivity of the f ′is (and to Stokes’
lemma). Indeed, (see Figure 3) we have that
S(m; σ0; γ) − S(m; σ0; γ′) =
∫
γ
θL −∫
γ
θL =
∫
Ω
dθL =
∫
Ω
ω. (6.6) eq:l1.5
where Ω is the 2-dimensional manifold contained in Sc and bounded by γ andγ′. Now, in coordinates, ∫
Ω
ω
16

is given by the following. The map F of (eq:l1.46.5) gives, in coordinates xα where
ω =∑
α,β ωα,βdxα ∧ dxβ,
xα = xα(t, s).
Thus, dxα =∂xα
∂tdt+
∂xα
∂sds. Hence, on Ω,
ω =∑
α,β
ωα,β((x1, . . . , x2n)dxα ∧ dxβ =
∑
α,β
ωα,β((x1(t, s), . . . , x2n(t, s))(∂xα
∂tdt+
∂xα
∂sds) ∧ (
∂xβ
∂tdt+
∂xβ
∂sds =
< ωα,β((x1(t, s), . . . , x2n(t, s)), X1(t, s) ∧X2(t, s) > dt ∧ ds,
(6.7) eq:l1.6
that is the (oriented) ordinary surface integral of the function
ω(t, s) =< ωα,β((x1(t, s), . . . , x2n(t, s)), ξ1(t, s) ∧ ξ2(t, s) >,
where ξ1(t, s) = F∗(∂
∂t), ξ2(t, s) = F∗(
∂
∂s) are the images of the two basis tangent
vectors to the square (t, s) ∈ [0, 1] × [0, 1] under F .Remark. The above formula shows that the value
∫Ωω is actually indepen-
dent of the choice made in its definition. Indeed, if one changes coordinates inU , the function ω stays unchanged, while if one changes the parametrizationof Ω, that is, the map F , then one recovers the familiar formula for change ofvariables in two-dimensional integrals.
For our purposes, the important point is the fact that ξ1, ξ2 are vectors inthe tangent space to Sc. As such, they will be written as linear combinations ofthe vectors
Xfi= Pdfi. (6.8) eq:l1.7
Indeed, the condition fj , fi =< dfj, Pdfi >= 0 shows that Xfiare tangent
to Sc while the nondegeneracy condition df1 ∧ df2 . . . dfn 6= 0, together with thefact that ω is symplectic, implies that they are at every point of Sc a basis inTSc.
Writing now ξa =∑
i gaiXfi
, we see that
< ω, ξ1 ∧ ξ2 >=∑
i,j
g1i g
2j < ω,Xfi
∧Xfj>=
∑
i,j
g1i g
2jfi, fj = 0. (6.9) eq:l1.8
At this point our analysis bifurcates: we will at first define the so-calles Action–Angle variables; then, by looking more carefully at the definition of S, we willdiscuss the Hamilton-Jacobi equation and the problem of Separation of Vari-ables.
17

6.1 Action-Angle variables
Action Angle variables can be defined for those regions in which the leaves Sc
are compact. It relies on the following theorem:
Proposition 6.1 A compact connected n-dimensional manifold admitting aglobally defined basis Xi in its tangent bundle, for which [Xi, Xj] = 0, is dif-feomeophic to the n dimensional torus Tn, that is the quotient Rn/Λ of Rn
modulo the discrete group Zn generated by a non degenerate lattice Λ ⊂ Rn overthe integers.
Let us now consider the set W in phase space for which Sc is compact, whichwe can regard as a manifold fibered in tori over F (W ). Possibly restricting thebase, this will be a product T
n × F (W ′).Let us fix a set of n generators γi of the homology of Tn, and let us change
generators in the ring of the constants of the motion as:
Ii =1
2π
∮
γi
pdq. (6.10) eq:l2.1
Notice that the Ii’s depend only on the fj .These new constants of the motion will be called Action variables. We will
suppose that the Jacobian∂I
∂fbe non zero, so that, actually, the I ′s are indeed
a complete set of generators for the ring of integrals of XH . So, the generatingfunction S(q, f) can be seen as a function of the 2n variables (q, I). Let us callψi the variables canonically conjugated to the Ii, namely,
ψi =∂
∂IiS(q, I). (6.11) eq:l2.2
We want to show that these variables are indeed angles on Tn. To this end itsuffices to show that their variation along the k-th cycle equals 2π if i = k andvanishes otherwise. So:
∮
γk
dψi = ((q, I)are coordinates) =∑
j
∮
γk
∂ψi
∂qjdqj +
∂ψi
∂IjdIj =
(γi is tangent to Sc) =
∮
γk
∂ψi
∂qjdqj = (
eq:l2.26.11) =
∮
γk
∂2S(q, I)
qjIidqj =
(the transformation is canonical so∂S
∂qj= pj)
=
∮
γk
∂
Iipjdq
j = (γkis fixed) =∂
∂Ii
∮
γk
pjdqj =
∂
∂Ii2πIk = 2πδik,
(6.12) eq:l2.3
that is∮
γkdψi = 2πδik which was what we had to prove.
Remark. The notion of action-angle variables is of great importance forwhat the structural aspects of integrable systems are concerned. Indeed our
18

analysis can be restated as follows. By the introduction of the action variables,and of their conjugated variables (which are angles on tori) we still have theproperty the the Hamitonian equation of motion read
Ii = 0
ψi =∂H
∂Ii= ωi(I1, . . . , In)
(6.13) eq:l2.3
with the additional property that the second half of the equation describe indeeda regular motion on a torus, dexscribed in angular coordinates. In particular,we see that, whenever the frequencies are linearly dependent on the integers,i.e., there is a relation of the form
∑
i
niωi = 2πN,
then the trajectory is periodic. For this reason we call such motions on toriquasi - or conditionally periodic motion.
Thus the upshot is that, in those regions of phase space in which the fibers(leaves) Sc are compact, the trajectory of an integrable system are quasi-periodicorbits that, in the generic case, fill the torus Sc.
Unfortunately, the Action-Angle approach is less effective for what the “ap-plicative” problem of finding the solutions of an integrable system is concerned,also in the regions where the invariant tori exist. Indeed, the main problemsare two:
1. identify tori in M and the generators of their homology.
2. (This is a general problem.) Explicitly express the momenta pi in termsof the variables q, I (or, at least, q, f).
7 Lax Pairs
Lax pairs were introduced in the theory of integrable PDEs, and not of ODEs.In particular they were introduced in the study of the KdV equation
ut = uxxx + 6uux.
However, as it often happens (a similar case is the theory of R-matrices, sucha tool revealed its relevance also in the theory of finite dimensional systems.We have already encountered Lax pairs in the theory of Hamiltonian equationsdefined on duals of Lie-Poisson reductive algebras. We are presently going toanalyze such formulations of the equations of the motion.
19

Definition 7.1 Let X be a vector field on a manifold M . We say that the pair(L, P ) is a Lax pair for X or, equivalently, that X admits a Lax representationif there are two smooth maps
L : M → g, P : M → g (7.1) eq:lp.1
from M to a Lie algebra g which is not restrictive to assume to be (a subspaceof) the Lie algebra of n× n matrices such that
1. The map L is non-trivial (possibly injective).
2. the evolution along X entails the equations
d
dtL = [P, L], (7.2) eq:lp.2
Remark. The first requirement of this definition is purposedly left mathemat-ically somewhat vague. The reason for this choice will be clear from the studyof the Toda system and of the Calogero system. For the moment let us just saythat the meaning of the word “non-trivial” is to be discussed case by case.
The method of Lax representation is, on general grounds, a very efficient -although non-algorithmic - way to find constants of the motion for X.
Let us consider, along with the Lax matrix L (who is the principal characterin this play, P being playing a side role) its characteristic polynomial. Forsimplicity, let us suppose that L be diagonalizable.
p(λ) = Det(λ− L) = λn −n∑
i=1
pi(L)λn−1. (7.3) eq:lp.3
The coefficients pi(L) are polynomials in the entries of L (namely, pi is (up toa sign) the sum of the determinant of the principal minors of L of order n− i,e.g., p1 = Tr(L) =
∑i Lii, and pn = Det(L)). As L is to be thought of as a
function of m ∈M , so pi are functions of m ∈M as well.In the sequel we will prove the following
prop.lp.1 Proposition 7.2 The coefficients pi of the characteristic polynomial of the Laxmatrix L are constants of the motion for X.
Remark: the eigenvalues of L are functions of these p′is, being the roots of thecharacteristic polynomial. Thus they are constant of the motion as well. Thisis why one usually refers to a Lax formulation of an evolution equation (a/k/a/Lax representation) as an isospectral flow.
We will divide the proof of this proposition (which is very easy) in two partsfor simplicity. The first part is essentially an algebraic lemma. Let us consider,along with the pi’s another set of polynomial functions of the matrix elementsof L, namely the polynomials
Ii =1
iTr(Li). (7.4) eq:lp.4
20

prop:lp.2 Proposition 7.3 (Newton’s formulæ) There is a polynomial relation (with poly-nomial inverse) between the pi’s and the Ii’s. Namely, one has:
pi = Ii +Pi(I1, . . . , Ii−1); Ii = pi +P ′i(p1, . . . , pn), i = 1, . . . , n;P0 = P ′
0 = 0.
The polynomials Pi, P ′i are universal, that is their form is independent of the
number n.
In view of Propositionprop.lp.2?? to prove the statement, that is, to prove isospec-
trality of the Lax flow, it suffices to prove that the Ii’s are constant of the motionas well. But this is true, thanks to the following chain of equalities:
d
dtIl =
1
l
d
dtTr(Ll) =
1
l
l∑
k=1
Tr(Lk · dLdt
· Ll−k−1) =
Tr(dL
dt· Lk−1) = Tr([P, L] · Lk−1) = Tr(P, [L,Lk−1]) = 0,
(7.5) eq:lp.5
where we have used the ad-invariance (a/k/a cyclicity) of the trace.At the formal level, we finally remark that a Lax representation allows one
to “factorize” the problem of finding solutions of the equations of motion (thatis, of the integration of X) as follows. Let us consider the Cauchy problemassociated with (a coordinate representation of) X:
dxi
dt= X i(x)
xi(0) = xi0
. (7.6) eq:lp.6
It will be trasformed, on g = Matn(C) into the problem
ddtL = [M,L]
L(0) = L(xi0)
(7.7) eq:lp.7
Let us assume that L(0) be diagonalizable with distinct eigenvalues λ1, . . . , λn,i.e. let us write
L(0) = G(0)ΛG(0)−1, λ = Diag(λ1, . . . , λn) (7.8) eq:lp.8
where G(0)−1 is the matrix sending “the j-th eigenvector of L(0)” into the j-thelement of the standard basis of Cn (that is, the j-th column of G(0) is a nonzero element of the j-th eigenspace of L(0)).
Since the eigenvalues of the solution L(t) of the Cauchy problem (eq:lp.87.8) are
constant along the flow of X, we seek for a solution of the form:
L(t) = G(t)ΛG(t)−1. (7.9) eq:lp.9
Taking the derivative w.r.t. t (that is, applying the vector field X, we have,taking into account that the matrix product (
eq.lp.9??) is multilinear, we get (with
the notation d∗dt
= ∗:L = (G)ΛG−1 −GΛG−1gG−1 (7.10) eq:lp.10
21

we get, inserting 1 = G−1G before the term Λ in the first summand,
L = (G)G−1GΛG−1︸ ︷︷ ︸
=L
−GΛG−1︸ ︷︷ ︸
=L
gG−1 = [GG−1, L], (7.11) eq:lp.11
i.e., a Lax equation with second member of the Lax pair M = GG−1.This yields the following scheme (the so-called “Lax scheme” - a/k/a Inverse
scattering method of the KdV theory):Let X admit a Lax representation L = [M,L] and suppose that for initial
data x(0) the matrix L0 = L(x0) be diagonalizable. The solution of the Cauchyproblem (
eq:lp.67.6) can be obtained via the following steps:
1. Construct the Lax pair, i.e. the map x ∈M → (L,M) of the system.
2. Diagonalize L0 as L0 = G0ΛG−10 ;
3. Solve the Cauchy problem
d
dtG = MG
G(0) = G0
(7.12) eq:lp.12
4. With the solution of (eq:lp.127.12), and with the constant diagonal matrix Λ
construct L(t) = G(t)ΛG(t)−1
5. Inverte the first half of the Lax map to get the solution of the equation ofmotion xi = xi(t) from L = L(t).
Remark. As we shall see in the sequel, this scheme is less algorithmic as itmight look. In particuar, points 1,3, and 5 in general need a lot of skill forbeing effectively implemented. However, the Lax scheme, and its generaliza-tions have emerged, in the last 30 years, as the most effective way for studying(and solving!) integrable systems, especially systems of evolutionary PDEs,and, moreover, a method that shows and enhances connections of the theory ofintegrable systems with algebra (e.g. the R-matrix theory) and geometry.
We will discuss these issues later (and in the proper Ph.D. course). For themoment let us show how the Lax method proves integrability of a remarkableN particle system, the Toda system.
7.1 The Toda System
We will now discuss a system who has a certain interests in the applications,and will be used to discuss features, as well as “problems” of the Lax scheme.
The system is a N -body system on the line; that is, its phase space is M =T ∗Rn, endowed with canonical coordinates p1, . . . , q
n, whose Hamiltonian is
HN =∑
i
1
2p2
i +∑
i
exp (qi − qi+1), modN, (7.13) eq:to.1
22

where mod N means that pi+N ≡ pi, qi+N ≡ qi (e.g., qN+1 = q1, q0 = qN .In the two particle case, we see that
H2 =1
2(p2
1 + p22) + 2 cosh (q1 − q2)
is the Hamiltonian of two particles on the line, interactint through a anharmonicpotential of special kind.
In general one can see that, actually, the potential VN has equilibrium points(qi = c, ∀ i) with nonnegative Hessian.
The Hamilton equation of motion associated with H can be compactly writ-ten as follow: dpi
dt= exp (qi−1 − qi) − exp (qi − qi+1)
dqi
dt= pi
(7.14) eq:to.2
We will show that this Hamiltonian flow is, irrespectively on the number ofparticles N , integrable in the Liouville sense, that is that (
eq:to.27.14) admits N
mutually communting integrals of the motion. We will divide the discussion intwo steps:
1. We will find N constants of the motion.
2. We will show that they are in involution.
For the solution of both problems we will extensively use a Lax representationfor the Hamiltonian flow (
eq:to.27.14).
This is constructed as follows. To simplify notations, define the followingfunctions (“Flaschka coordinates”):
bi = pi, ai = exp (1
2qi − qi+1)modN, i = 1, . . . , N. (7.15) eq:to.3
We notice that the Hamiltonian can be expressed through these functions as
H =∑
i
1
2b2i +
∑
i
a2i .
The 2N functions bi, ai are not a coordinate system in M , but they are not“far” from being coordinates; indeed, they are not functionally independent,since
∏i ai = 1, but if we replace, say, aN by the center of mass coordinate
Q =1
N
∑
i
qi
we get a honest coordinate system on M .Let Ei,j be the N ×N matrix whose elements are all zeroes, except for the
elemnt on the i-th row and j-th column, which equals 1. (In other words,Eij = ei ⊗ ǫj , where ei is the standard basis in Rn and ǫi is its dual basis).
23

Let us define the two matrices L and M by:
L =∑
i
(piEii + ai(Ei,i+1 + Ei+1,i)
)
M =∑
i
ai(Ei,i+1 − Ei+1,i),(7.16) eq:to.4
that is,
L =
p1 a1 0 · · · aN
a1 p2 a2 0 · · · 0
0. . .
. . .. . .
.... . .
. . .. . . 0
0 aN−2 pN−1 aN−1
aN · · · aN−1 pN
(7.17) eq:to.5
M =
0 a1 0 · · · −aN
−a1 0 a2 0 · · · 0
0. . .
. . .. . .
.... . .
. . .. . . 0
0 −aN−2 0 aN−1
aN · · · −aN−1 pN
(7.18) eq:to.6
Proposition 7.4 Along the Hamiltonian vector field XH (eq:to.27.14), the matrix L
evolves asd
dtL = [
1
2M,L]. (7.19) eq:to.7
Proof. The proof of this well known fact (Flaschka, 1973) is somewhat ele-mentary, and requires only computations. For what the left hand side of theequation is concerned, we can compute pi and ai through (
eq:to.27.14) and the defini-
tions (eq:to.37.15) as:
pi = a2i−1 − a2
i , ai =1
2(pi − pi+1)ai. (7.20) eq:to.8
For what the left hand side of this equation is concerned, we can algebraicallycompute the commutator [M,L] recalling that
[Eij ,Ekl] = δjkEil − δilEkj,
and thus verify the validity of the assertion.From the general theory of Lax evolution equations we thus get that the N
quantities
Ii =1
iTrLi (7.21) eq:to.9
are constants of the motion.
24

We remark that the Ii are functionally independent. Indeed, it is clear thatI1 =
∑i pi, I2 = H , and, generically,
Ik =∑
i
1
kpk
i + o(pk−2i ). (7.22) eq:to.10
To show that they are mutaully commuting is somewhat more complicated.At first we remark that, since the I ′is are functionally independent, the coef-ficients pi of the characteristc polynomial of L are functionally independent,and hence, generically (that is, on an open dense set of M), the eigenvaluesλ1, . . . , λN of L are independent. We will show that such eigenvalues are mutu-ally commuting.
Let us take two of them, say λ 6= µ and coinsider two normalized eigenvectorsu, v of L associated with λ and µ, that is two vectors satisfying
Lu = λu, L v = µv, (u, u) = (v, v) = 1, (7.23) eq:to.11
whose existence is guaranteed by the symmetry of L.Since, e.g., λ = (u, Lu), we have
∂λ
∂pi
=
∂
∂pi
(u, Lu) =((∂u
∂pi
, Lu) + (u,∂L
∂pi
u) + (u, L∂u
∂pi
))
=
(u,∂L
∂pi
u) +(((∂u
∂pi
, λu) + (L†u,∂u
∂pi
))
= (u,∂L
∂pi
u) + λ∂
∂pi
(u, u) =
(u,∂L
∂pi
u) = u2i .
(7.24) eq:to.12
In complete analogy, since
∂L
∂qi= ai(Ei,i+1 + Ei+ 1, i) − ai−1(Ei−1,i + Ei,i−1)
we get∂λ
∂qi= aiuiui+1 − ai−1ui−1ui. (7.25) eq:to.13
Taking into account the analogous formulæ for µ, we get that the Hamiltonianvector field associated with µ is
Xµ =∑
i
(− (aivivi+1 − ai−1vi−1vi)
∂
∂pi
+ v2i
∂
∂qj
)(7.26) eq:to.14
so that
λ, µ = −(u2
i (aivivi+1 − ai−1vi−1vi) − v2i (aiuiui+1 − ai−1ui−1ui)
), (7.27) eq:to.15
25

that is,
λ, µ = −∑
i
(uivi(Ri +Ri−1)), with Ri = ai(uivi+1 − viui+1). (7.28) eq:to.17
We now consider the eigenvector equation Lu = λ u, which reads for thecomponents ui (still understanding ui+N ≡ ui, vi+N ≡ vi),
ai−1ui−1 + piui + aiui+1 = λui, (7.29) eq:to.18
and the corresponding equation for v:
ai−1vi−1 + pivi + aivi+1 = µvi, (7.30) eq:to.19
Now, multiplying (eq:to.187.29) by vi and (
eq:to.197.30) by ui, and subtracting we get
(λ− µ)uivi = ai−1ui−1vi − aiui+1vi − ai−1vi−1ui + aivi+1ui, (7.31) eq:to.20
that is,
uivi =1
λ− µ(Ri − Ri−1). (7.32) eq:to.21
Substituting this result into (eq:to.177.28) we get
λ, µ =1
λ− µ
∑
i
(R2i−1 − R2
i )
which vanishes for the periodicity conditions Rj+N = Rj
8 Lax equations with ‘spectral’ parameter
Let us reconsider §, and the Lie-Poisson brackets. The simplest example of thislpbr
instance is well known basic courses in Mechanics: the Euler equations for thefree rigid body in the Euclidean space.
We recall that, in vectorial language, these equations are written as
d
dtM = Ω ×M, (8.1) eq:11.1
where M and Ω are the angular momentum and the angular velocity in the so-called body reference frame and × denotes the vector product. Recalling that ina suitable body reference frame we have M i = IiΩ
i, (the Ii’s are called the prin-cipal momenta of inertia) we can explicitly write the equations of motion (
eq:11.18.1)
as
ddtM1 = (1
I2− 1
I3)M2M3 = Ω2M3 − Ω3M2 and cyclic. (8.2) eq:11.2
Writing these equations as
d
dtM i = ǫilkΩ
lMk, (8.3) eq:11.3
26

we see that these equations are Hamiltonian equations on so(3)∗, with Hamil-tonian function
HL =1
2
(∑
i
(M i)2/Ii
)=
1
2(Ω · M) = T
According to the general recipe of equation (eq:55.74.8) we can find the Lax representa-
tion for (eq:11.18.1). Let us consider the basis in g = so(3) given by the antisymmetrc
3 × 3 matrices (eq:4.93.10), which now we rebaptise as
E1 =
0 0 00 0 −10 1 0
, E2 =
0 0 10 0 0−1 0 0
, E3 =
0 −1 01 0 00 0 0
. (8.4) eq:11.4
As ad-invariant inner product on g we can take
g(X, Y ) = −1
2Trace(XY )
so that gij = δij . Then we set:
L =∑
i
M iEi ,Ω =∑
i
∂H
∂M iEi =
∑
i
ΩiEi, (8.5) eq:11.5
which givesd
dtL = [Ω, L] (8.6) eq:11.6
since[Ω, L] = [
∑
l
ΩlEl,∑
k
MkEk] =∑
ilk
(ǫilkΩ
lMk)Ei. (8.7)
However, this Lax representation is somewhat deceiving: indeed, althoughit is true that the traces of the Lax matrix are constants of the motion we seethat
Tr(L) = 0;1
2Tr(L2) = −2(M · M), (8.8) eq:11.7
that is, it yields the trivial constant of the motion (that is, the Casimir of theLie Poisson brackets on g). Indeed this somewhat unpleasant feature is not aspecific feature of this example. Indeed it can be proven (see below) that
eq:11.8 Proposition 8.1 The Casimir functions of the Lie-Poisson brackets are thead∗-invariant functions on g∗.
The simplest loop off the hole for this situation is the following trick due toManakov (?), to be further discussed and justified in the next lectures stemsform the following idea. Let us suppose that we have a Lax representation of adynamical system,
d
dtL = [M,L]
27

in which L (and, possibly, M) depend (say, polynomially) on a parameter z;In this case, we say that this is a Lax representation with a parameter (thatis usually called spectral parameter for a sort of historical reasons) if the aboveequation holds identically in the parameter z.
In such a case, the characteristic polynomial of L(z) will be, identically inz, constant along the Lax flow. The novelty is that, now, in the expansion
Det(λ− L(z)) = λn −∑
i
pi(z)λn−i (8.9) eq:11.9
the coefficients pi are themselves polynomials in z, say of degree mi,
pi(z) =
mi∑
k=0
pki z
k. (8.10) eq:11.10
where the pki are functions on the phase space M . Now, since
dpi(z)
dt= 0
identically in z, all the coeffcients p(k)i are constants of the motion. In this way
we may hope to recover the interesting constants of the motion.Let us illustrate such a procedure in the case of the Euler equations for the
rigid body.Let us deform the matrices
M =
0 −M3 M2
M3 0 −M1
−M2 M1 0
, Ω =
0 −Ω3 Ω2
Ω3 0 −Ω1
−Ω2 Ω1 0
(8.11) eq:11.11
into:M(z) = zA +M ; Ω(z) = zB + Ω (8.12) eq:12
with constant diagonal matrices A = diag(ai), B = diag(bi). The Lax equationswill read
d
dt(zA +M) = [zB + Ω, zA +M ]
|| ||dM
dt= z2 [B,A]︸ ︷︷ ︸
=0
+z([B,M ] + [Ω, A]) + [Ω,M ]
(8.13) eq:13
So, these equations will be equivalent to the Euler equations iff
[B,M ] + [Ω, A] = 0. (8.14) eq:14
One can notice that the general solution to this equation, taking into accountthat A and B are diagonal, is
Mij =ai − aj
bi − bjΩij (i 6= j). (8.15) eq:15
28

Since Ωij = ǫijkMij/Ik one can see that the only non trivial solution to ourproblem is
ai = b2i ; a1 =1
2(I2 + I3 − I1)/ > and cyclic. (8.16) eq:16
In this way we get
L(z) = z1
2
I2 + I3 − I1 0 0
0 I1 + I3 − I2 00 I1 + I2 − I3
+
0 −M3 M2
M3 0 −M1
−M2 M1 0
(8.17) eq:17
A straightforward computation shows that, calling C == m − 12 + m22 + m2
3,the characteristic integrals of the Lax representations are given by:
Tr(L(z)) = F1(I1, I2, I3)
1
2Tr(L(z)2) = z2F2(I1, I2, I3) − C
1
3Tr(L(z)3) = z3F3(I1, I2, I3)+
z
(M3
2I2I1 +M22I3I1 +M1
2I2I3 −1
2C(I2
1 + I22 + I2
3 )
),
(8.18) eq:11.18
that is, the coefficient of z in the last constant of the motion is
(I1I2I3)H + F4(I1, I2, I3))C, (8.19) eq:11.17
which is what we were seeking for.
9 The KdV Equation
The KdV equation is a kind of lowest order non-linear deformation of the waveequation in 1 + 1 dimensions
∂2ψ
∂t2= u2
0
∂2ψ
∂x2. (9.1) eq:k.1
whose solutions are linear superpositions of right and left traveling waves
ψ(x, t) = fl(x− u0t) + fr(x+ u0t). (9.2) eq:k.2
Remark that the single waves in this equation (say, the left moving one) satisfythe first order equation
∂u
∂t+ u0
∂u
∂x= 0
This linear equation is satisfied by Fourier modes
uk(x, t) = exp(i(kx− ωt)),with ω = ku0
29

The last equation is called dispersion relation. In this sense, the wave equationis called dispersionless, since all Fourier modes travel with the same speed v =ω/k = u0. We deform the dispersion relation to
ω = u0k − βk3 (9.3) eq:k.3
and add the simplest non-linear term to the equation, assuming it still pre-serves the property of being a conservation law. After performing a Galileantransformation to set the “original wave velocity” u0 to zero, we get
∂u
∂t+ β
∂3u
∂x3+ αu
∂u
∂x= 0. (9.4) eq:k.4
Noticing that a scale transformation x 7→ ax, t 7→ bt, u 7→ cu allows one tochange the coefficients α, β at will, we will define the Korteweg - deVries (KdV)equation as
ut − 6uux + uxxx = 0. (9.5) eq:k.5
The next subsections are essentially based on Novikov, Zakharov, Manakov,
Pitaevskii to which we refer for full proofs and details.
9.1 Elementary solutions
The way to obtain elementary solutions of (eq:k.59.5) is to look for solutions of the
formu(x, t) = u(x− vt) , v ≥ 0. (9.6) eq:k0.1
Substituting there, we get:
−vu′ − 6uu′ + u′′′ = 0 ⇒ −vu− 3u2 + u′′ = c1, (9.7) eq:k0.2
where ′ means the derivative w.r.t. the single argument. Multiplying by u′ andintegrating we get
1
2− vu2 − u3 +
1
2(u′)2 = c1u+ c2. (9.8) eq:k0.3
Now we can consider two cases:
A) wave like solutions: suppose u(ξ) → 0 with all its derivatives as ξ → ±∞.Then the two integration constants must vanish, and we are lead to:
(u′)2 = 2u3 + vu2. (9.9) eq:k0.4
This equation can be solved by means of an elementary integration toyield:
u(ξ) = −1
2
v
cosh(√
v
2(ξ + δ))
. (9.10) eq:k0.5
30

B) Stationary solutions: let us set v = 0. Then we get, from (eq:k0.39.8),
1
2(u′)2 = u3 + c1u+ c2, (9.11) eq:k0.6
that is, the function u(x)/2 satisfies the defining differential equation forthe Weierstrass ℘-function,
℘′(z; τ) = 4℘3(z; τ)−g2(τ)℘−g3(τ), , g2(τ) = −c1, g3(τ) = − 1
c2. (9.12) eq:k0.7
Remark. The Weierstrass ℘(z; τ) function is a doubly periodic function on C
defined as follows:Let Λ be the lattice in C defined by two numbers ω, ω′, linearly independent
over the real, which we can take, without loss of generality, to be (ω, ω′) =(1, τ), ℑ(τ) 6= 0, and let Λ′ denote the non-vanishing elements of Λ. Define:
℘(z; τ) =1
z2+∑
ξ∈Λ′
1
(z − ξ)2− 1
ξ2. (9.13) eq:k0.8
One notices:
1. The series converges for all z not in Λ.
2. The function ℘(z, τ) is periodic w.r.t. Λ, i.e.
ψ(z + n +mτ ; τ) = ψ(zτ ; τ). (9.14) eq:k0.9
3. ψ(s; τ) has a double order pole in z = 0 (and hence at each point of thelattice Λ).
4. The function
φ(z; τ) = ℘′(z; τ)2−4℘3(z; τ)+g2(τ)℘(z; τ)+g3(τ), where g2(τ) =, g3(τ) =,(9.15) eq:k0.10
has no singularities in C and vanishes at z = 0. This, by Liouville theoremit equals 0 everywhere. That is, ℘(z; τ) satisfies the nonlinear differentialequation (
eq:k0.79.12).
Thank to the second above property we see that ℘(z; τ) is a function on thequotient T = C/Λ having a second order pole at one point, that is, is a mero-morphic function on the compact 1-dimensional smooth (actually analytical)complex torus T.
31

9.2 Lax representation and Inverse Scattering
Let
L(t) = − d2
dx2+ u(x, t) (9.16) eq:k1.1
a “time1” dependent one-dimensional Schrodinger operator.
A = 4d3
dx3− 3(ud
dx+
d
dxu). (9.17) eq:k1.2
Proposition 9.1 The KdV equation (eq:k.59.5) admits the Lax representation
d
dtL = [L,A]. (9.18) eq:k1.3
Proof. The proof of this lemma is a straightforward computation, which is leftto the reader.
Let us now suppose that u(x, t) ∈ C∞0 (R) be a smooth real function with
rapid decrease on the line. Then A is a (essentially) anti-self adjoint operator inL2(R), and the Lax equation implies that L(t) is unitarily equivalent to L(0).That is, the spectrum σL remains constant in time, and all the evolution isencoded in the evolution of the “eigenvectors”.
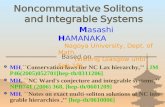
The basic idea of the inverse scattering method (ISM) to solve KdV forrapidly decreasing initial data is contained in two milestones:
1. The possibility of parameterizing these eigenvectors by means of quantitieswhose evolution in time is simple enough to be integrated at once (actually,is linear). These quantities will be referred to as the Scattering Data (SD).
2. The possibility of reconstructing the potential u(x, t), in a concrete way, bythe knowledge of its Scattering data, via the so-called Gel’fand - Levitan- Marchenko equation.
In a picture, the essence of the ISM is the following:In the next three sections we will discuss the three arrows of the above
diagram.
9.3 The Scattering Data
Assumptions: u(x) ∈ C∞(R), and∫
R
(1 + |x|2)|u(x)| <∞. (9.19) eq:k2.1
that is, u(x) looks like:On general grounds, we know that:
1Here, the “time” has nothing to do with the time of Quantum Mechanical Schrodingeroperator.
32

Figure 2: The ISM
Scattering data
Time
evolution of SD
Inverse Scattering
L (0) SD(0)
SD(t)L(t)u(x,t)
u(x,0)
1. the spectrum of Lu = − d2
dx2 +u(x) in contained in the semi-infinite interval[U0,∞).
2. If λ > 0 then λ is in the continuum spectrum ((Lu −λ)−1 exists but is notbounded. Moreover λ is a double point, in the sense that there are twogeneralized eigenfunctions associated with λ.
3. if U0 < 0 there is a denumerable quantity of distinct proper eigenvaluesλi; thanks to the condition (
eq:k2.19.19), actually, the number of elements in the
point spectrum of Lu is finite.
4. The proper eigenvalues are simple, that is there is only one element ψi ∈L2(R) such that
Luψi = λiψi. (9.20) eq:k2.2
The proof of the last property goes as follows.Let us suppose that λi = λ is an element in the point spectrum of Lu, and
let us suppose that ψ1, ψ2 satisfy
− d2
dx2ψα + u(x)ψα = λψα, α = 1, 2. (9.21) eq:k2.3
Then their Wronskian determinant
W (ψ1, ψ1) = Det
(ψ1 ψ2
ψ1,x ψ2,x
)= ψ1ψ2,x − ψ2ψ1,x (9.22) eq:k2.4
vanishes. Indeed, at first one shows that is is constant noticing that
d
dxW (ψ1, ψ2) = ψ1ψ2,xx − ψ2ψ1,xx = 0, (9.23) eq:k2.5
(substituting (eq:k2.39.21)). Then, supposing that ψα ∈ C2(R)∩L2(R), one computes
the value of W (ψ1, ψ2) in the limit x → ∞ to obtain the thesis.
33

U0
To resolve the spectrum one is lead to consider, as a true parameter, themomentum k =
√λ. So we see that, in the k-complex plane, the spectrum
of Lu consists in the real line (minus 0) (continuous spectrum) plus a finitenumber of purely imaginary points (the point spectrum) iκi, which we can puton the positive imaginary axis.
Let us consider the case of real k 6= 0. The space Gk of solutions of Luψ =k2ψ is two-dimensional. We will consider two bases in Gk, according to theirasymptotic behaviour. They are:
ψ1 ≃ e−ikx
ψ2 ≃ eikx x→ ∞φ1 ≃ e−ikx
φ2 ≃ eikx x→ −∞ (9.24) eq:k2.6
Since u(x) is assumed to be real, we must have:
ψ1(x, k) = ψ2(x, k), φ1(x, k) = φ2(x, k), (9.25) eq:k2.7
as well as:ψ2(x, k) = ψ1(x,−k), φ2(x,−k) = φ1(x, k). (9.26) eq:k2.7a
Let us denote by φ = ψ1;ψ = ψ1. Thanks to the above relations we have that(φ, φ) and (ψ, ψ) are two bases of Gk; thus there must exists a matrix (calledthe transfer matrix) T connecting these two bases, whose elements depend onlyon k (not on x!). In particular, writing φ = aψ + bψ we have that
T =
(a(k) b(k)
¯a(k) ¯b(k)
). (9.27) eq:k2.8
34

Computing the Wronskian determinant of these two bases respectively at ∞and −∞ we easily show that
W (φ, φ) = W (ψ, ψ) = 2i k. (9.28) eq:k2.9
But
W (φ, φ) = W (aψ + bψ, bψ + aψ) = Det
(aψ + bψ bψ + aψaψx + bψx bψx + aψx
)=
Det
[(ψ ψψx ψx
)·(a bb a
)]= W (ψ, ψ) · Det(T ),
(9.29) eq:k2.10
whence T is unimodular, that is
Det(T ) ≡ |a|2 − |b|2 = 1. (9.30) eq:k2.11
By analogy with the Schrodinger case, one customarily calls the quantities
t(k) =1
a(k), r(k) =
b(k)
a(k)
the transmission and reflection coefficients respectively. Notice that
|a|2 − |b|2 = 1 ⇔ |t|2 + |r|2 = 1. (9.31) eq:k2.12
We next want to spell out notable properties of analyticity of the solutions ofthe Schrodinger equation, as well as of the transmission coefficient t(k) w.r.t.the spectral parameter k.
Proposition 9.2 Let us define:
χ+(x; k) = φ(x, k)eikx; χ−(x; k) = ψ(x, k)eikx (9.32) eq:k2.13
Then χ+ is analytical in the upper k-half plane, and continuous for ℑ(k) ց 0;it has the asymptotic behaviour
χ+(x; k) = 1 + o(1
k), |k| → ∞, ℑ(k) > 0; (9.33) eq:k2.14
In complete analogy, χ−(x; k) is analytical in the lower half plane, and asymp-totically is given by
χ−(x; k) = 1 + o(1
k), |k| → ∞, ℑ(k) < 0. (9.34) eq:k2.14a
Remark that χ−(x; k) has the same analyticity properties as χ+(x; k).
Proof (Sketch of.) These properties can be verified by transforming the “Cauchydata”
−φxx + uφ = k2φφ(x; k) ≃ eikx, x→ ∞ , (9.35) eq:k2.15
into an integral equation.
35

Lemma 1 The function (distribution)
G(x, x′; k) =
− sin(k(x−x′))
kx > x′
0 x < x′(9.36) eq:k2.16
is a Green function for the “bare” Schrodinger operator L0 = − d2
dx2 − k2, thatis,
− d2
dx2− k2(G(x, x′; k) = δ(x− x′). (9.37) eq:k2.17
Proof of the Lemma. We have to show that, for any test function f(x),∫ ∞
−∞f(x)L0 ·G(x, x′; k) dx = f(x′). (9.38) eq:k2.18
This can be done by recalling the definition of distributional derivative and acouple of integration by part processes. Indeed to be continued.
By means of the Green function, we can write the integral equation for φ:
φ(x, k) = e−ikx +
∫ ∞
−∞G(x, x′; k)u(x′)φ(x′)dx′, (9.39) eq:k2.19
so that χ+(x; k) will be expressed as
χ+(x; k) = 1 +
∫ x
−∞
e2ik(x−x′) − 1
2iku(x′)χ+(x′; k)dx′. (9.40) eq:k2.20
In complete analogy,
χ−(x; k) = 1 +
∫ ∞
x
e2ik(x−x′) − 1
2iku(x′)χ−(x′; k)dx′. (9.41) eq:k2.20a
The relevant fact is that such kind of integrals equations are “solved” by themethod of successive approximations, that is, by setting
χ+,0 = 1, χ+,i+1 =
∫ x
−∞
e2ik(x−x′) − 1
2iku(x′)χ+,i(x
′; k)dx′; and χ+(x, k) =
∞∑
i=0
χ+,i.
(9.42) eq:k2.21
Let us now compute the Wronskian determinant W (φ, ψ). From the fundamen-tal equation φ = aψ + bψ, we get:
W (φ, ψ) = a(k)W (ψ, ψ) = 2ika(k) ⇒ a(k) =1
2ik(φψx − ψφx). (9.43) eq:k2.22
Since we know that, as functions of k, φ and ψ are analytical in the upper halfplane H+, and their Wronskian asymptotically is given by 2ik, we get that a(k)is analytical in H+ and, asymptotically,
a(k) = 1 + o(1
k). (9.44) eq:k2.23
36

We also remark that the zeroes of a(k) (that is, the poles of the transmissioncoefficient) determine the discrete spectrum of Lu, viewed as an operator in theHilbert space L2(R).
To ascertain this, a remark is in order. As an ordinary differential equation,the Schrodinger equation
(− d2
dx2+ u(x) − k2)φ = 0 (9.45) eq:k2.23a
admits two regular solutions. From the form of the potential u(x) (that is, fromthe fact that limx→±∞ u(x) = 0), the asymptotics
φ(x, k) ≃ e−ikx x→ −∞ψ(x, k) ≃ eikx x → ∞
(9.46) eq:k2.24
hold whatever k ∈ C is. In particular, for purely imaginary k = iκ,
φ(x, iκ) ≃ eκx x→ −∞ψ(x, iκ) = ψ(x,−iκ) ≃ e−κx x→ ∞ (9.47) eq:k2.24a
Suppose now that κ is such that a(iκ) = 0. This means that the WronskianW (φ, ψ) vanishes, hence φ(x, iκ) and ψ(x;−iκ) are linear;y dependent over C
(actually, over R). In such a case, ther must exist a constant (in x) b = b(κ),such that
φ(x; iκ) = b(κ)ψ(x, iκ) ≡ b(κ)ψ(x;−iκ). (9.48) eq:k2.25
But, looking at the asymptotic expansions (eq:k2.24a9.47) we notice that the particular
solution of (eq:k2.23a9.45) has an exponentially decaying behaviour both at ∞ and at
−∞, that is, it belongs to L2(R). So λ = −κ2 is in the point spectrum of Lu.But from the assumption (
eq:k2.19.19) we know that there are at most a finite number
of such points, iκi with κ1 > κ2 > · · ·κn, and so a corresponding finite numberof “coefficients” bn = b(κn).
Remark. The meaning of the coefficients bn in terms of the standard anal-ysis of the Schrodinger operator on the line is the following.
Firs of all, we recall that, in the undergraduate courses of Quantum Me-chanics, the characteristic condition for proper eigenvalues of the Schrodingeroperator Lu is that the solution with exponential decay at x = −∞ can besmoothly joined with that having exponential decay at x = +∞. Indeed, thisis the meaning of equation (
eq:k2.259.48), with the proviso in mind that this “junction”
involves the scalar factor bn.Also, it is known that the eigenfunction relative to the minimal eigenvalue
−κ21 has no zeroes, while the j-th eigenfunction has j − 1 zeroes. Thus,
bk = |bk|(−1)k−1
It can be shown, moreover, that the zeroes iκ1, . . . , iκn of a(k) are simplevedere note.
Thus we can state:
37

Proposition 9.3 The inverse transmission coefficient a(k) is a holomorphicfunction in the upper k half plane H+, having n simple zeroes at the purelyimaginary points k = iκj , j = 1, . . . , n with asymptotics
a(k) = 1 + o(1
k), , k → ∞, ℑ(k) > 0. (9.49) eq:k2.26
The next step consists in showing that the spectral properties of Lu are de-termined once known, beyond the n pairs of real numbers κn, bn, the reflection
coefficient r(k) = b(k)a(k)
. Clearly, these properties, for real k, are encoded in the
transfer matrix T of eq. (eq:k2.89.27), that is, in the two complex functions t(k) = 1
a(k)
and r(k). actually, from unitarity, we see that the absolute value of a(k) isknown once known r(k), since
|t(k)|2 + |r(k)|2 = 1 ⇔ |a|2 =1
1 − |r(k)|2 . (9.50) eq:k2.27
What is deeper and, possibly, surprising, is that, thanks to the analyticity andthe asymptotics (
eq:k2.269.49), a(k) can be reconstructed from the knowledge of its
modulus and the location of its zeroes. To this end we have to recall twonotions: the Cauchy principal value and the dispersion relations.
The Cauchy principal value of a function having a singularity at x = x0 isthe limit (provided it exists)
∫f(x)dx = lim
δ→0+
∫ x0−δ
−∞f(x)dx+
∫ ∞
x0+δ
f(x)dx. (9.51) eq:k2.28
Γ
−R Rx+x−x
δ δ
For instance, if x0 ∈ R, and f(z) is analytic in the upper half plane, andgoes to zero sufficiently fast as |z| → ∞, the Cauchy formula applied to thecontour depicted in the figure below shows that
∫(f(x)dx = iπResfx0
(9.52) eq:k2.29
38

Dispersion relations are defined as follows. Let f(z) be analytic in the upperhalf plane. Then the Cauchy formula says (see the next figure)
f(z) =1
2πi
∮
Γz
f(w)
w − z. (9.53) eq:k2.30
If z → x ∈ R we can use the same formula, provided we deform the contour Γz
in the contour Γ as in the picture. Let us now suppose that
f(z) → 0, |z| → ∞.
Then the integral (eq:k2.309.53) reduces to the integral on the horizontal line. For
z → x ∈ R it reduces to the integral over the lowest part of the curve, that is,
f(x) =1
2πi
∫ x−δ
−∞
f(y)
y − xdy +
∫
Sδ
f(y)
y − xdy
︸ ︷︷ ︸πif(x)
+
∫ ∞
x+δ
f(y)
y − xdy
(9.54) eq:k2.31
So, if δ → 0 we get
f(x) =1
2πi
∫f(y)
y − xdy +
1
2f(x) ⇒ f(x) =
1
πi
∫f(y)
y − xdy. (9.55) eq:k2.31
The presence of the factor 1πi
in (eq:k2.319.55), although innocently looking, is crucial.
Indeed it allows one to reconstruct f knowing only ℑ(f) or ℜ(f) since:
ℑ f(x) = −1
π
∫ℜ f(y)
y − xdy, ℜ f(x) =
1
π
∫ℑ f(y)
y − xdy, (9.56) eq:k2.32
We will apply these consideration to the function a(k), which we need to
−R Rxx+x−
z
Γ
Γzδδ
39

determine for real values of k. Let us consider the auxiliary function
Ω(k) = a(k)
n∏
j=1
k + iκj
k − iκj
(9.57) eq:k2.32b
The function Ω(k) is analytic in the upper half plane H+, and is nowhere van-ishing, since we killed all the simple zeroes of a(k) with the multiplicative factor
n∏
j=1
k + iκj
k − iκj
.
Since Ω is nowhere vanishing, its logarithm is well defined, and
log Ω(k) = log |Ω(k)| + i arg(Ω(k)). (9.58) eq:k2.32a
We also notice that for real k, since κj is real as well,
∣∣k + iκj
k − iκj
∣∣ = 1 (9.59) eq:k2.30x
Thus the dispersion relations applied to log Ω says that
arg(Ω(k)) = −1
π
∫
log |a(k′)|k′ − k
dk′. (9.60) eq:k2.33
From (eq:k2.329.56) we get
arg(Ω(k)) = arg(a(k)) +
n∑
j=1
arg
(k + iκj
k − iκj
), (9.61) eq:k2.34
that is (eq:k2.339.60) reads, in view of (
eq:k2.30x9.59)
arg(a(k)) = −in∑
j=1
logk + iκj
k − iκj
− 1
π
∫
log |a(k′)|k′ − k
dk′, (9.62) eq:k2.35
showing that, as anticipated, the full function a(k), for k real, can be recon-structed from the knowledge of its modulus.
We end this subsection with the following (motivated) definition
Definition 9.4 The Scattering data associated with the Schrodinger operator
Lu = − d2
dx2+ u(x)
is the set of pairs
(k, r(k)), k > 0andκj , bjj=1,...,n, (9.63) eq:k2.36
where the restriction k > 0 follows from the relation r(−k) = r(k).
40

10 The Inverse Spectral Transform
The inverse spectral (or scattering) transform solves the problem of reconstruct-ing a potential u(x), entering the Schrodinger operator Lu starting from theScattering Data (
eq:k2.369.63).
We consider the relation, holding for k ∈ R,
φ(x; k) = a(k)ψ(x; k) + b(k)ψ(x, k), (10.1) eq:k3.1
and multiply byeikx
a(k). Recalling the definition of the functions χ±(x; k), we get
χ+(x, k)
a(k)= χ−(x, k) + r(k)χ−(x, k)e2ikx. (10.2) eq:k3.2
Thanks to the analyticity properties of χ± we see thatχ+(x; k)
a(k)is analytic in
the upper half plane, except in the points iκj where (a(iκj) = 0) it has simplepoles. Furthermore, its limit for |k| → ∞ equals 1. Furthermore, χ−(x; k) isanalytic in the lower half plane, and its limit for |k| → ∞ equals 1 as well.
Figure 3: x
Γ
Γ
−
+
κ jiPoles
We thus consider the function
Φ(x; k) =
χ+(x;k)
a(k)ℑ k > 0
χ−(x; k) ℑ k < 0(10.3) eq:k3.3
41

This function has simple poles in the points iκj , j = 1, . . . , n, is analytic inC r iκj ∪ R and has a jump on the real axis which equals, thanks to therelation (
eq:k3.210.2),
∆Φ = r(k)χ−(x, k)e2ikx.
From the Cauchy formula we get that, if Γ = Γ− ∪ Γ+ is the contour depictedin Fig. x,
Φ(x; k) − 1 =1
2πi
∫
Γ
Φ(x; k′) − 1
k′ − kdk′. (10.4) eq:k3.4
Thank to the asymptotic behaviour of Φ(x; k)1, the only surviving contributionin the contour integral comes from the poles and the jump along the real axis,whence:
Φ(x; k) = 1 +
n∑
j=1
Γj(x)
k − iκj
+1
2πi
∫ ∞
−∞
r(k′)χ−(x, k′)e2ik′x
k′ − kdk′, (10.5) eq:k3.5
whereΓj(x) = ResΦ(x; k)|k=iκj
.
remarking that χ+(x, k) = φ(x; k)eikx, we get
χ+(x; k)
a(k)=φ(x; k)eikx
a(k)⇒ ResΦ(x; k)|k=iκj
=φ(x; iκj)e
−κjx
a′(iκj), (10.6) eq:k3.6
with a′(k) =da(k)
dk. Since φ(x; iκj) = bjψ(x, iκj) = bjψ(x,−iκj). Thus
Γj(x) =φ(x; iκj)e
−κjx
a′(iκj)=bjψ(x;−iκj)e
−κjx
a′(iκj)=bjχ−(x;−iκj)e
−2κjx
a′(iκj). (10.7) eq:k3.7
In turn, noticing that for ℑ k < 0, χ−(x; k) = Φ(x; k), we have, from (eq:k3.510.5)
χ−(x; iκj) = 1 + in∑
l=1
Γl(x)
κl + κj
+1
2πi
∫ ∞
−∞
r(k′)χ−(x, k′)e2ik′x
k′ + iκj
dk′. (10.8) eq:k3.8
Substituting this in (eq:k3.710.7) we get the n equations:
Γj(x) =bje
−2κjx
a′(iκj)
1 + i
n∑
l=1
Γl(x)
κl + κj
+1
2πi
∫ ∞
−∞
r(k′)χ−(x, k′)e2ik′x
k′ + iκj
dk′
,
(10.9) eq:k3.9
j = 1, . . . , n, which tie Γj(x) and χ−(x; k). We can get an integral equationlooking at the limit ǫց 0 of φ(x, k−iǫ), k ∈ R, noticing that it equals χ−(x, k).Thus:
χ−(x, k) = 1 +
n∑
j=1
Γj(x)
k − iκj
+ limǫց0
1
2πi
∫ ∞
−∞
r(k′)χ−(x, k′)e2ik′x
k′ − k + iǫdk′ (10.10) eq:k3.10
42

The last term of this formula is to be understood in the Cauchy principal valuesense, namely:
limǫց0
∫ ∞
−∞
f(k′)
k′ − k + iǫdk′ = −iπf(k) +
∫f(k′)
k′ − kdk′. (10.11) eq:k3.11
The minus sign in the residue term −iπf(k) comes from the fact that since thepole is at k′ = k − iǫ in the limit ǫց 0 one is integrating over a contour of theform
Figure 4: y
Cδ
that is, the small contour Cδ is clockwise oriented.We remark that these considerations allow us to give a (still somewhat im-
plicit formula) for the potential u(x) with given scattering data. Indeed, werecall ((
eq:k2.20a9.41)) that
χ−(x; k) = 1 +
∫ ∞
x
e2ik(x−x′) − 1
2iku(x′)χ−(x′; k)dx′. (10.12) eq:k3.12
The asymptotic expansion of this formula is, for |k| → ∞,
χ−(x; k) = 1 +1
kχ
(1)− (x) +O(1/k2) = 1 +
1
2ik
∫ ∞
x
u(x′)dx′ +O(1/k2), (10.13) eq:k3.13
and so
u(x) = − d
dxdx(2iχ
(1)− (x)
)(10.14) eq:k3.14
From (eq:k3.1010.10) we thus get
u(x) = − d
dx
2i
n∑
j=1
Γj(x) +1
π
∫ ∞
−∞r(k′)χ−(x, k′)e2ik′xdk′
. (10.15) eq:k3.15
Summing up the equations (eq:k3.910.9) and (
eq:k3.1010.10) are to be thought of a linear non-
homogeneous system of n equations plus a functional2 equation in the unknownsΓi(x), . . . ,Γn(x), χ−(x; k):
Γj(x) =bje
−2κjx
a′(iκj)
(1 + i
∑nl=1
Γl(x)κl+κj
+ 12πi
∫∞−∞
r(k′)χ−(x,k′)e2ik′x
k′+iκjdk′)
χ−(x, k) = 1 +∑n
j=1Γj(x)
k−iκj+ limǫց0
12πi
∫∞−∞
r(k′)χ−(x,k′)e2ik′x
k′−k+iǫdk′
(10.16) eq:k3.16
2The functional parameter we are considering here is k. The space variable x plays therole of a parameter here.
43

We remark that the coefficients of this system are expressed in terms of theScattering Data. Once the solution of the above system is found, u(x) can becomputed according to eq. (
eq:k3.1510.15).
It is outside the size of the lecture course to fully discuss the solvability ofthe system (
eq:k3.1610.16). Actually, we will use it (or rather the GLM form of it we
are discussing in the next subsection) for the so-called reflectionless potentials,that is, for those potentials with r(k) ≡ 0.
11 The GLM equation
It is a more compact form of the systems (eq:k3.1610.16). The preliminary needed
observation is the following. Let f(x; k) be a function which is analytic forℑ k < 0 (still, x plays the role of a parameter here), and bounded for |k| →∞,ℑ k < 0. Then its Fourier transform f(x, y) vanishes for y < 0.
Indeed,
f(x, y) ≃∫ ∞
−∞eipyf(x; p)dp (11.1) eq:k4.1
Considering a complex p = pr + ipi, we get
f(x, y) ≃=
∫ ∞
−∞eipry−piyf(x; p)dp (11.2) eq:k4.1a
Actually, we can consider the integral over the real line occurring in the defini-tion of the (anti) Fourier transform (
eq:k4.111.1) as the limit for R → ∞ of a contour
integral in the complex p plane. Indeed, if y < 0, we notice that we can con-sider the closed contour Γ′ depicted in Fig z, since the presence of the term −piyexponentially damps the contribution of the integration on the semicircle C.
Figure 5: z
Γ
C
−R R
44

Since f is analytic for ℑ k < 0, then the thesis follows from the Cauchytheorem.
A function satisfying these requirements is χ−(x; k). Thus we can write
χ−(x; k) = 1 +
∫ ∞
0
A(x; y)e−ikydy, (11.3) eq:k4.2
where A(x; y) is (with a careful choice of (2π)l factors, which is unessential inthe sequel) the Fourier transform of χ−(x; k) − 1. Since χ−(x; k) = ψ(x; k)eikx
we get
ψ(x; k) = e−ikx +
∫ ∞
0
A(x; y)e−iky−ikxdy = (y 7→ y + x)
e−ikx +
∫ ∞
x
G(x; y)e−ikydy, where G(x, y) = A(x, y − x).
(11.4) eq:k4.3
The meaning of the function G(x, y) is clear: it is the kernel of the integraloperator that sends the solution to the (in physical parlance) “bare” – thatis with u(x) = 0 – Schrodinger problem into the “dressed” one (with u(x) anarbitrary scattering potential). We remark that, since ψ(x; k) = ψ(x,−k) wehave
ψ(x; k) = e+ikx +∫∞
xG(x; y)eikydy
ψ(x;−k) = eikx +∫∞
xG(x; y)eikydy
⇒ G(x; y) = G(x; y) is real. (11.5) eq:k4.5
The GLM equation can be gotten combining this representation with the fun-damental formula
φ(x, k) = a(k)ψ(x, k) + b(k)ψ(x, k). (11.6) eq:k4.6
We divide it by a(k), subtract on each side e−ikx, multiply by eiky and integratew.r.t. k ∈ R, getting:
∫ ∞
−∞dk
(φ(x, k)
a(k)− e−ik(x−y)
)=
∫ ∞
−∞dk(eiky(ψ(x, k) − e−ikx + r(k)ψ(x; k))
).
(11.7) eq:k4.7
Let us look at the LHS of this equation. The integrand is rapidly decreasing for|k| → ∞ and has poles for k = iκj . Thus can be represented as
2πin∑
j=1
φ(x; iκj)e−κjy
a′(iκj)= 2πi
n∑
j=1
bjψ(x;−iκj)e−κjy
a′(iκj)(11.8) eq:k4.8
In this formula one can substitute, using (eq:k4.311.4),
ψ(x;−iκj) = eκjx +
∫ ∞
x
G(x; z)e−κjzdz, (11.9) eq:k4.9
45

to get
LHS(eq.eq:k4.711.7) = 2πi
(n∑
j=1
bje−κj(x+y)
a′(iκj)+
∫ ∞
x
(G(x, z)
n∑
j=1
bje−κj(y+z)
a′(iκj)
)dz
).
(11.10) eq:k4.10
Still using the integral representation (eq:k4.311.4) for ψ(x; k) and using the reality
of G(x, y) we rewrite the RHS of (eq:k4.1011.10) as
∫ ∞
−∞dk
(eiky(∫ ∞
x
G(x, z)e−ikz dz + r(k)(eikx +
∫ ∞
x
G(x, y)eiky dy)))
=
=
∫ ∞
x
dz
∫ ∞
−∞dk(G(x, z)eik(y−z)) +
∫ ∞
x
dz
∫ ∞
−∞dk(G(x, z)r(k)eik(z+y))+
∫ ∞
−∞dk(r(k)eik(x+y)).
(11.11) eq:k4.11
The first of these three terms can be simplified: indeed, since K(x, z) = 0, z < xthe integral over z can be extended to the whole real line. Thus we get
∫ ∞
x
dz
∫ ∞
−∞dk(G(x, z)eik(y−z)) =
∫ ∞
−∞dzG(x, z)
∫ ∞
−∞dk(eik(y−z))
︸ ︷︷ ︸2πδ(y−z)
= 2πG(x, y).
(11.12) eq:k4.12
Summing up, at this stage we can rewrite (eq:k4.711.7) as:
2πi
(n∑
j=1
bje−κj(x+y)
a′(iκj)+
∫ ∞
x
(G(x, z)
n∑
j=1
bje−κj(y+z)
a′(iκj)
)dz
)=
2πG(x, y) +
∫ ∞
x
dz
∫ ∞
−∞dk(G(x, z)r(k)eik(z+y)) +
∫ ∞
−∞dk(r(k)eik(x+y)).
(11.13) eq:k4.13
Dividing by 2π and collecting the terms, we arrive at
G(x, y) +
n∑
j=1
bje−κj(x+y)
ia′(iκj)+
1
2π
∫ ∞
−∞dk(r(k)eik(x+y))+
∫ ∞
x
dz
(n∑
j=1
bje−κj(z+y)
ia′(iκj)+
1
2π
∫ ∞
−∞dk(r(k)eik(z+y))
)= 0,
(11.14) eq:k4.14
that is, calling
F(w) :=n∑
j=1
bje−κj w
ia′(iκj)+
1
2π
∫ ∞
−∞dk(r(k)eik w), (11.15) eq:k4.15
46

we arrive at the celebrated Gel’fand – Levitan – Marchenko equation
G(x, y) + F(x+ y) +
∫ ∞
x
G(x, z)F(y + z)dz = 0. (11.16) eq:k4.16
Remark We stress that the GLM equation is an integral linear non-homogeneousequation for the unknown kernel G(x, y), constructed in terms of the functionF(w) which is defined in terms of the Scattering data. Actually we do notneed the full solution of GLM to reconstruct u(x). Indeed, recalling (
eq:k3.1410.14)
that u(x) is expressed in terms of the asymptotic expansion of χ−(x, k) as
u(x) = − d
dx
(2iχ
(1)− (x)
). From (
eq:k4.311.4) we get
χ−(x, k) = 1 +
∫ ∞
x
G(x; y)e−ik(y−x)dy = 1 +1
ikG(x, x) +O(1/k2) (11.17) eq:k4.17
so that
u(x) = −2d
dxG(x, x), (11.18) eq:k4.18
where the asymptotic expansions are simply gotten integrating by parts (eq:k4.1711.17)
w.r.t. x, since
eik(x−y) =1
ik
d
dxeik(x−y).
12 The time evolution
In the last two sections we have discussed the horizontal rows of Figure 1.Incidentally, nothing that we have said therein specifically refers to the KdVequation. The point is that the evolution of the Scattering Data along the KdV-time is particularly simple. This last property is the subject of the presentSection, which follows the seminal results of Gardner, Green, Kruskal, andMiura (GGKM).
The key ingredient is the Lax representation (eq:k1.29.17) and (
eq:k1.39.18) of the KdV
flow, namely
ut − 6uux + uxxx = 0 ⇔ d
dtLu = [Lu, A],
with Lu = − d2
dx2+ u,A = 4
d3
dx3− 3(ud
dx+
d
dxu).
(12.1) eq:k5.1
Let us consider the eigenvalue problem for Lu,
Luf = k2f (12.2) eq:k5.2
and derive w.r.t. the (KdV)-time, taking into account isospectrality. We get
Luf + Luf = k2f . (12.3) eq:k5.3
47

Since Lu = [Lu, A] this yields
LuAf −A Luf︸︷︷︸k2f
+Luf − k2f = 0 ⇔ (Lu − k2)(Af + f) = 0. (12.4) eq:k5.4
In other words, if f is a solution of the spectral problem with “eigenvalue” k2,the same holds for f = (Af + f), and so there must exist two constants (w.r.t.x) c1, c2 s.t.
f = (Af + f) = c1φ+ c2φ. (12.5) eq:k5.5
To find these constants, one looks at the asymptotic behaviour of f = (Af + f)for x → −∞. Since f = φ = e−ikx + o(1), f = o(1). As u(x, t) → 0, x → −∞,we have
Af = (4d3
dx3+ o(1))f ≃ 4ik3e−ikx + o(1), x → −∞. (12.6) eq:k5.6
Thus asymptotically f ≃ 4ik3e−ikx + o(1), x→ −∞. and hence
c1 = 4ik3, c2 = 0, ⇔ f = 4ik3φ(x, k),
whenceφ(x, k) = −A · φ(x, k) + 4ik3φ(x, k). (12.7) eq:k5.7
Remarking that this equation, although derived from asymptotic considerationat x → −∞ holds for all x ∈ R, we now consider its asymptotics at x → ∞.Namely, still from the relation φ = aψ + bψ we get, on the one hand,
φ ≃ ae−ikx + beikx + o(1), (12.8) eq:k5.8a
and on the other,
(−A + 4ik3)φ ≃ (−4d3
dx3+ 4ik3)(ae−ikx + beikx + o(1). (12.9) eq:k5.8b
Retaining only the finite terms of these equations we get (i3 = −i)
ae−ikx + beikx = a(−4(−i3)k3 + 4ik3)e−ikx + (−4(i3)k3 + 4ik3)eikx. (12.10) eq:k5.9
So we get the GGKM relationsa = 0
b = 8ik3b(12.11) eq:k5.10
We notice that these relations hold irrespectively of k being a in the continuousor point spectrum; indeed the quantities bj will evolve as
bj = 8κ3jbj
Finally, we arrive at the conclusion that the time evolution of the Scatteringdata is
SD(t) = (k, r(k; 0)e8ik3t), (κj, e8κ3
j t)j=1,...,n. (12.12) eq:k5.11
48

13 Reflectionless potentials and n-soliton solu-
tions
The most remarkable (and as we shall see, simple) application of these tech-niques deals with the so-called Reflectionless potentials and n-soliton solutions.
Let us reconsider the GLM equation
G(x, y) + F(x+ y) +
∫ ∞
x
G(x, z)F(y + z)dz = 0,
u(x) − 2d
dxK(x, x),
F(w) :=
n∑
j=1
bje−κj w
ia′(iκj)+
1
2π
∫ ∞
−∞dk(r(k)eik w).
(13.1) eq:k6.1
A reflectionless potential is (simply!) a potential for which r(k) ≡ 0, so that
Frl(w) :=
n∑
j=1
bje−κj w
ia′(iκj), (13.2) eq:k6.2
and the Scattering data are just the 2n numbers (κj , bj). This means that inthis way we are considering 2n-dimensional manifolds of solutions of the KdVequation, with, however, arbitrarily large n. Indeed, it is worthwhile to stressthat since along the KdV evolution we have r = 4ik3r, we see that, indeed, themanifold of reflectionless potentials is indeed an invariant manifold of the KdVflow.
A preliminary observation is in order: since r(k) = 0 ⇒ b(k) = 0, k ∈ R.Thus |a(k)|2 = 1. But an analytical function in the upper half plane of constantmodulus is uniquely defined by its zeroes iκj as
a(k) =n∏
j=1
k − iκj
k + iκj
. (13.3) eq:k6.3
Thus all numbers a′(iκj) can be considered known, and parametrize the abovementioned manifold with the (real and positive) quantities
κj , βj =bj
ia′(iκj), (13.4) eq:k6.4
and thus consider
Frl(w) :=
n∑
j=1
βje−κj w. (13.5) eq:k6.2b
Let us thus write GLM with the Ansatz
G(x, y) =
n∑
j=1
Kj(x)e−κjy. (13.6) eq:k6.5
49

We haven∑
j=1
Kj(x)e−κjy +
n∑
j=1
βje−κj(x+y)) +
n∑
m,j=1
∫ ∞
x
(Km(x)e−κmzβle−κj(y+z))dz =
n∑
j=1
Kj(x)e−κjy +
n∑
j=1
βje−κj(x+y)) +
n∑
m,j=1
βjKm(x)e−κjy
∫ ∞
x
e−(κj+κm)z
︸ ︷︷ ︸e−(κj+κm)x
κj + κm
= 0
that is,n∑
j=1
(Kj(x) + βje
−κjx +n∑
m=1
βme−(κj+κm)x
κj + κm
Km(x))e−κjy = 0
(13.7) eq:k6.6
Since the exponentials e−κjy are independent (remember that κj 6= κl, j 6= l)are independent, we arrive at the inhomogeneous linear system of equations forthe Kj(x):
Kj(x) +n∑
m=1
βme−(κj+κm)x
κj + κm
Km(x) = −βje−κjx, j = 1, . . . , n. (13.8) eq:k6.7
It is useful, for further considerations, to put the system in matrix form. If A
is the matrix
Ajm = δj
m +βme
−(κj+κm)x
κj + κm
, (13.9) eq:k5.8
and B and G the column vectors
B =
−β1e−κ1x
...βne
−κnx
G =
K1(x)...
Kn(x)
, (13.10) eq:k6.9
we see that (eq:k6.713.8), that is, GLM under the Ansatz (
eq:k6.513.6) translates into
A · G = B. (13.11) eq:k6.10
One can see that Det(A) 6= 0; so we use the well known Cramer rule for thesolution of the non-homogeneous system (
eq:k6.1013.11), i.e.:
Kj(x) =Det(A(j))
Det(A), (13.12) eq:k6.11
where A(j) is the matrix obtained replacing the j-th column of A with B. Hencethe solution G(x, y) of the GLM equation so obtained is
G(x, y) =1
Det(A)
n∑
j=1
Det(A(j))e−κjy =1
Det(A)
n∑
j=1
Det(A(j)(x, y)), (13.13) eq:k6.12
50

where the j-th column of the matrix A(j)(x, y) is
T (−β1e−κ1x−κjy, · · · ,−βne
−κnx−κjy).
Thus the diagonal
G(x, x) =1
Det(A)
n∑
j=1
Det(A(j)(x)), (13.14) eq:k6.13
with the j-th column of the matrix A(j)(x) is
T (−β1e−(κ1+κj)x, · · · ,−βne
−(κn+κj)x).
Now, one readily realized that
−βme−(κm+κj)x =
d
dxA
mj , (13.15) eq:k6.14
so that the term under the sum in (eq:k6.1313.14) is
Det
A11,x A12 A1n
A21,x A22 A2n
...An1,x An2 Ann
+ Det
A11 A12,x A1n
A21 A22,x A2n
...An1 An2,x Ann
+
· · ·+ Det
A11 A12 A1n,x
A21 A22 A2n
...An1 An2 Ann,x
=
d
dxDet(A),
(13.16) eq:k6.15
yielding the final formula
u(x) = −2d2
dx2log Det(A). (13.17) eq:k6.16
Let us illustrate how one can indeed construct solution of KdV by means ofthis quite simple formula. Let us start with the case n = 1. Here A(x) =
Det(A(x)) = 1 + βe−2κx
2κand so (after straightforward computations)
u(x) =−4κβe−2κx
(1 + β
2κe−2κx)2
Setting φ = 12κ
log β
2κwe get
u(x) ≡ u(x, 0) =−2κ2
cosh2 κ(x− φ)(13.18) eq:k6.17
51

This means that we regard u(x, 0) as initial (Cauchy) data for the KdV equation.We know (by GGKM) that during the evolution, κ remains constant, while
β 7→ βe8κ3t ⇒ φ 7→ φ(t) = φ+ 4κ2t.
Thus substituting φ(t) into (eq:k6.1713.18) we get the one soliton solution of KdV:
u(x, t) =−2κ2
cosh2 κ(x− 4κ2t+ φ), (13.19) eq:k6.18
that is, a right-moving potential well whose propagation speed is proportional toits depth. The last picture depicts the “interaction” of 2 solitons; it is somewhatrepresentative on how the n soliton solution develops in time. For t→ −∞ thesolution is an almost linear superposition of n waves like (
eq:k6.1813.19),
un(x,−∞) ≃∑
j
u1(x− vjt), (13.20) eq:k6.19
with the highest solitons at the farthest left, since the speed of an isolatedwell is proportional to its depth. Then the fastest soliton(s) start catchingup the others (in the picture, “t = 0”); the procedure goes over, ending, fort→ ∞, where the initial configuration looks like the mirror image of the initialone. Indeed, the shapes and heights of the initial solitons are recovered, butin the reverse order. The only effect of the soliton interaction is that there isa difference in the phase shifts. In particular, for n = 2 the fastest (highest)soliton experiences a forward phase shift while slowest gets a backward phaseshift. These phase shifts are given by
∆φ1 =1
κ1log∣∣∣κ1 + κ2
κ1 − κ2
∣∣∣, ∆φ2 =−1
κ2log∣∣∣κ1 + κ2
κ1 − κ2
∣∣∣
Figure 6: w
=4κv 2
−2κ 2
52

Figure 7: wui
faster
slower
slower
faster
x
t
14 Periodic Potentials
Let us now consider a potential such as the one depicted below that is, a periodicpotential with period T w.r.t. x, and the associated Schrodinger operator3 Lu.In this case we will no more be able to give solutions in a way so explicit as thesoliton formula (
eq:k6.1613.17).
The central concepts of our preliminary analysis are that of Bloch-Floqueteigenfunctions and of monodromy matrix.
Let us start with a few remarks (to be definite, let us suppose T = π, andu(x) smooth). The ODE
− d2
dx2y + u(x)y = 0 (14.1) eq:kk.1
admits two fundamental solutions y1 and y2 that are the solutions of the Cauchyproblems:
− d2
dx2y + u(x)y = 0
y(0) = 1y′(0) = 0
− d2
dx2y + u(x)y = 0
y(0) = 0y′(0) = 1
(14.2) eq:kk.2
Associated with these data we define the characteristic equation:
ρ2 − [y1(π) + y′2(π)]ρ+ 1 = 0, (14.3) eq:kk.3
3In the periodic case, one also speaks of Hill’s equation and/or Sturm-Liouville operator.
53

Figure 8: wui
and of characteristic exponent α related with the solutions ρ1,2 of the charac-teristic equation, by
eiπα = ρ1, e−iπα = ρ2, ⇒ 2 cosπα = y1(π) + y′2(π), (14.4) eq:kk.4
where, clearly, α is defined up to multiples of 2πi.
Theorem 14.1 (Floquet) If ρ1 6= ρ2 the Hill’s equation (eq:kk.114.1) (HE) admits two
quasi-periodic independent solutions (called Bloch-Floquet solutions)
f1(x) = eiαxp1(x), f2(x) = eiαxp2(x), with pi(x+ π) = pi(x). (14.5) eq:kk.5
If ρ1 = ρ2 then Hill’s equation has a solution p(x) that is periodic of period π ifρ1,2=1 and of period 2π if ρ1,2 = −1. If y(x) is a second solution of HE, then
y(x+π) = ρ1y(x)+θp(x), θ = 0 ⇔ cy1(π)+y′2(π) = ±2 and y2(π) = y′1(π) = 0.(14.6) eq:kk.6
Before proving the theorem, we discuss a few of its notable consequences. Sup-pose that the ρ1 6= ρ2 and α ∈ R. Thus |fi(x)| = |p(x)| and so the absolutevalue of fi is periodic, and hence bounded over R. If α /∈ R there are no boundedsolutions, since
|f(x+ nπ)| = e−nℑ(α)π|p(x)|, n ∈ Z.
If ρ1 = ρ2, then the boundedness of the second solution is equivalent to θ = 0since
y(x+ nπ) = ρn1y(x) + np(x), n ∈ Z. (14.7) eq:kk.7
Proof (of Floquet’s theorem). The proof rests on the fact that, if we definethe operator Tπ of translation by π (also called monodromy operator), then
54

the commutator [Tπ, Lu] vanishes, and so Lu and Tπ can be simultaneouslydiagonalized. This point of view will be further explored. For the moment letus proceed with more elementary/explicit considerations.
The commutation of Tπ and Lu says that if y(x) is a solution of HE, theny(x + π) =
(Tπ(y)
)(x) is a solution as well. In particular this holds for the
two fundamental solutions (eq:kk.214.2). Since the space of solutions of HE is two
dimensional there must hold:
y1(x+ π) = a1y(x) + a2y2(x)y2(x+ π) = b1y(x) + b2y2(x)
x ∈ R. (14.8) eq:kk.10
Thus evaluating these relations and their derivatives at x = 0 we get
y1(x+ π) = y1(π)y(x) + y′1(π)y2(x)y2(x+ π) = y2(π)y(x) + y′2(π)y2(x)
x ∈ R, (14.9) eq:kk.11
that is, the matrix representing the action of Tπ on the space of solutions of HEis the Wronskian matrix
Λ =
(y1(π) y2(π)y′1(π) y′2(π)
)(14.10) eq:kk.12
of (y1, y2) at x = π.Bloch-Floquet solutions are constructed as follows. Let us diagonalize Λ,
that is, at first solve the characteristic equation
Det(ρ− Λ) = ρ2 − [y1(π) + y′2(π)]︸ ︷︷ ︸Tr(Λ)
+ 1︸︷︷︸Det(Λ)
= 0, (14.11) eq:kk.13
where Det(Λ) = 1 follows form the invariance of the Wronskian determinant,and the initial data (
eq:kk.214.2). Diagonalizing Λ means to find a solution y(x) of the
HE equation satisfying the additional condition, say, y(x + π) = ρ1y(x), withρ− 1 a solution of the characteristic equation. In this case we will set
y(x) = eiαxp(x), eiπα = ρ1,⇒ p(x+ π) = p(x), p(x) ≡/ 0. (14.12) eq:kk.14
Let us suppose that ρ2 6= ρ1, and let us construct y associated with ρ2; thenf1 = y and f2 = y are linear;y independent. This ends the proof for ρ1 6= ρ2.
Let us now suppose ρ1 = ρ2; still we can construct one solution y(x) satis-fying
y(x+ π) = ρ1y(x). (14.13) eq:kk.15
Since ρ1 = ρ2 implies ρ1 = 1 or ρ1 − 1, we see that this solution isperiodic of π(or 2π).
Now, let us consider the (algebraic) adjoint (ρ−Λ)∨; it has the form, for allρ,
(ρ− Λ)∨ =
(ρ− y′2(π) y2(π)y′1(π) ρ− y1(π)
). (14.14) eq:kk.16
Suppose that y2(π) 6= 0 vedi note.———
55

Corollary 14.2 The solutions of HE are stable (that is, are bounded) iff either
y1(π) + y′2(π) is real and |y1(π) + y′2(π)| < 2 (14.15) eq:kk.17
ory1(π) + y′2(π) = ±2 and y2(π) = y′1(π) = 0. (14.16) eq:kk.18
14.1 The spectral problem for the Hill’s equation
We now consider the spectral problem
− d2
dx2ψ + u(x)ψ = λψ (14.17) eq:kk2.1
for the Hill’s equation, with real u(x). Since u(x) − λ has the same periodicityproperties as u(x) we can apply the results of Floquet’s theorem to the potentialu(x)−λ. Essentially, we must study the properties of the discriminant ∆ of thecharacteristic equation, taking into account that now the matrix Λ will (nontrivially) depend on the spectral parameter λ.
We at first remark the following. The point spectrum of Lu, wieved as anoperator in L2(R) is void. Indeed, in the characteristic exponents are not real,then the solutions are not bounded. If the solution are bounded, then theirabsolute value is periodic, and thus cannot be integrable on the real line.
The spectrum of Lu (that is, the solutions to HEλ) is characterized via thefollowing
Theorem 14.3 (Lyapunov–Haupt) With each Hill’s spectral problem one canassociate two monotonically growing sequences
λ0 < λ1 < λ2 . . . , λi ր ∞ (first kind eigenvalues)
λ′0 < λ′1 < . . . , λ′i ր ∞ (second kind eigenvalues).(14.18) eq:kk2.2
They are nested as follows:
λ0 < λ′1 ≤ λ′2 < λ1 ≤ λ2 < λ′3 · · · . (14.19) eq:kk2.3
such that HEλ has a periodic solution of period π for λ = λn, on of period 2πfor λ = λ′i. The Solutions of HEλ are stable in the open intervals
(λ0, λ′1), (λ
′2, λ1), (λ2, λ
′3) · · · . (14.20) eq:kk2.4
At the end of these intervals, the solotions are generically unstable. They arestable if two of the integrals merge, that is,
λ2n+1 = λ2n+2, or λ′2n+1 = λ′2n+2. (14.21) eq:kk2.4a
The first kind eigenvalues are the roots of ∆(λ) = Tr(Λ(λ) = 2, the scond kindones of ∆(λ) = −2. If λ ∈ C, the solutions of HEλ are unstable.
56

The content of the above Theorem can be rephrased as follows: the pointspectrum of Lu is void. The continuous spectrum is made of the intervals (bands)
(λ2i, λ′2i+1) ∪ (λ′2i+2, λ2i+3), i = 0, 1, 2, . . .
separated by gaps
(−∞, λ− 0] ∪ [λ′1, λ′2] ∪ [λ1, λ2] ∪ · · · . (14.22) eq:kk2.5
The bands can never disappear; instead, they can merge, when either of theconditions (
eq:kk2.4a14.21) is verified. Indeed these consitions simply state that a gap
closes. The first gap (−∞, λ0] can never shrink to a point.To grasp this result, we better use a kind of “perurbative” argument. Let us
consider the “bare“ case, u(x) ≡ 0 (that we regard as a periodic function with
period π. The fundamental solutions of −d2y
dx2= λy are given by
y1 = cos(√λx); y2 =
1√λ
sin(√λx), (14.23) eq:kk2.6
and so
∆(λ) = 2 cos(√λπ) =
2 cosh(
√|λ|π) λ ≤ 0
2 cos(√λπ) λ > 0
(14.24) eq:kk2.7
In this case there is one gap (−∞, 0] and one band (0,∞). All first kindeigenvalues λi except the zeroeth pairwise coincide, and the same holds for thesecond kind eiganvalues, namely:
λ′2i−1 = λ′2i = (2i− 1)2; λ2i−1 = λ2i = (2i)2, i = 1, . . . (14.25) eq:kk2.8
The graphic of ∆0 is shown below.When we switch on a non trivial periodic potential u(x) what happens (in
the generic case) is that the minimal points of ∆(λ) are pushed downwards,while the maximal points are pushed upwards. Thus the intersections of thegraph of ∆(λ) with the horizontal lines ∆ = ±2 “open up” and the gaps mayform (see the next figure).
Finally, one can show that the width of gaps is exponentially decreasing withλ. In particular one says that a potential u(x) is a finite gap potential if it hasa finite number of gaps (that is, for λ > λM , the first kind eigenvalues coincide,as well as the second kind ones.
λ λ λ
gap band
= λλ0 1,λ
,
2 1 2 3 4λ, ,
57

2
−2
λ
∆(λ)
The relevance of this analysis for what the KdV equation is concerned is thefollowing. Suppose that a periodic potential u(x) is taken as initial value forthe KdV equation
ut − 6uux + uxxx = 0.
Then, since the KdV evolution is isopectral the gap-band pattern associatedwith u(x, t) will not depend on t; in particular, the characteristic equation ofthe monodromy data
ρ2 − Tr(Λ(λ)) + 1 = 0 (14.26) eq:kk2.9
will remain constant in time. We will exploit this result in next lectures, afterhaving discussed further structural properties of the KdV equation.
58

15 Complete integrability of KdV
Here we will start discussing complete integrability, in the “Liouville sense”,of the KdV equation. First of all we will show that in can be considered asa Hamiltonian system. Preliminary remarks on Hamitonian theory of PDEsare in order. We will stick to the 1 + 1 dimensional case, and mainly discussalgebraic aspects.
The manifoldsM we are going to consider are are Loop spaces, that is, spacesof (smooth) functions from the circle S1 to some finite-dimensional manifold M ,(which will mainly be, for the moment, Cn or Rn, or a suitable open set thereof).The same arguments apply to spaces of smooth maps from R to M with suitablevanishing boundary conditions4
Thus a point in M is a smooth n-tuple of functions (u1(x), . . . , un(x)) wherex ∈ S1(R) and (u1, . . . , un) is an ordinary set of coordinates in M .
A tangent vector to u(x) will be a (n-tuple of) function(s)
u(x) = (u1(x), . . . , un(x)), x ∈ S1. (15.1) eq:h1.1
and a cotangent vector will be represented as well as a (n-tuple of) function(s)– possibly generalized functions (v1(x), . . . , vn(x)), the pairing between TM andT ∗M being given by
〈u(x), v(x)〉 =
∫
S1
∑
i
ui(x)vi(x)dx. (15.2) eq:h.2
Definition 15.1 The space of local functionals on M , which will be the spaceof admissible functions on M is the space of maps M → C admitting the integralrepresentation
F [u] =
∫
S1
f(u, ux, uxx, uxxx · · · )dx (15.3) eq:h.3
smoothly depending on u and polynomially depending on a finite number ofderivatives unx. To be explicit, the integrand f in (
eq:h.315.3) is a function of a finite
(albeit arbitrarily large) number of arguments:
f = f(ξ0; ξ1, . . . , ξN).
This function is required to be smoothly depending on ξ0, and be a polynomialin the other arguments ξ1, . . . , ξN .
The differential of a local functional∫
S1 f(u, . . . , u(N)) is given by (we writeit the one-dimensional case)
F =∂f
∂u− d
dx
∂f
∂ux
+ · · · + (−1)N dn
dxn(∂f
u(n)). (15.4) eq:h.4
4The functions entering the n-soliton solutions of KdV belong to this second class.
59

We remark that the above definition of differential is the straightforward gener-alization of the object entering the Euler-Lagrange equations of motion. Indeed,integrating by parts, we see that
〈dF, ξ(x) = limt=to0
1
tF (u+ tξ) − F (u). (15.5) eq:h.4
For this reason, the differential of a local functional is often called Lagrangiandifferential and denoted
dF =δF
δu(x). (15.6) eq:h.5
Example Let us compute the differential of the functional
H [u] =
∫
S1
h(u, ux)dx =
∫
S1
(u3 +1
2u2
x)dx. (15.7) h.4a
We have:∂h
∂u= 3u2 ∂h
∂ux
= ux ⇒ δh
δu(x)= 3u2 − uxx. (15.8) eq:h.4b
Poisson brackets are given by means of a linear (over C) operator P sendingT ∗M → TM as
F [u], G[u] =
∫
S1
δF
δu(x)P (
δG
δu(x). (15.9) eq:h.6
The operator P is require to satisfy
1. Antisymmetry:
F [u], G[u] =
∫
S1
δF
δu(x)P (
δG
δu(x)= −
∫
S1
δG
δu(x)P (
δF
δu(x)= −G[u], F [u]
(15.10) eq:h.7
2. The Jacobi identity
F [u], G[u], H [u]+ G[u], H [u], F [u]+ H [u], F [u], G[u] = 0.(15.11) eq:h.8
We remark that, since local functionals are not a ring, we need not require theLeibniz property.
In the following we will mainly deal with the so-called local Poisson brackets.They are characterized by the property that the operator P is represented by amatrix P ij whose entries are finite sums of the form:
P ij = Aij0 (u, ux, · · · ) + Aij
1 (u, ux, · · · )d
dx+ · · ·+ Aij
p (u, ux, · · · )dp
dxp, (15.12) eq:h.9
where the coefficients Aijl (u, ux, · · · ) satisfy the same requirements of the den-
sities f(u, ux, · · · ) of local functionals F [u].
60

We remark that in P is local, the Poisson bracket of two local functional isstill a local functional.
Obviously, antysimmetry amounts to the requirement
P ji = −TP ij, (15.13) eq:h.10
where now transposition is meant of operators w.r.t. the inner product (eq:h.215.2)
(e.g., T (Aij1 (u, ux, · · · ) d
dx) = − d
dx· Aij
1 (u, ux, · · · ).The Jacobi property is more subtle. We however remark that the intrinsic
criteria discussed in Section check for a bivector to be a Poisson bivector holdtrue also in this Loop space situation. We now give (without proof) a criterionfor a bivector defined on a loop space of a vector space (or of an open set thereof)to be a Poisson bivector.
Let P be a bivector, and let us define/denote, for α a 1-form and X a vectoron M the “directional derivative” of Pα w.r.t. by:
P ′X(u;α) := lim
ǫ→0
1
ǫ
(P (u+ ǫX) − P (u)
)· α. (15.14) eq:h.11
Then P is a Poisson bivector if and only if, for every triple of 1-forms α, β, γ itholds
〈α, P ′Pβ(u; γ)〉 + 〈β, P ′
Pγ(u;α)〉 + 〈γ, P ′Pα(u; β)〉 = 0. (15.15) eq:h.12
We end this preliminary Section with the following remarks.1) Many authors prefer to define Poisson brackets using the so–called bilocal
formalism. This is, in a sense, a more direct generalization of the coordinatedefinition of the Poisson brackets as
f(y), g(y) =∑
ij
∂f
∂yiyi, yj ∂g
∂yj. (15.16) eq:h.13
The idea is that, in the loop space case, we have “coordinates” ui(x), with ia discrete and actually finite index, and x being a “continuous” index. Sincesums on ‘continuous’ indexes are, indeed integrals, we are lead to consider
F [u], G[u] =∑
i,j
∫
S1
dx
∫
S1
dyδF
δui(x)u(x), u(y) δF
δuj(y). (15.17) eq:h.14
In the case of local Poisson brackets of the form (eq:h.915.12) the two formalisms are
completely equivalent. Indeed, one simply defines
ui(x), uj(y) =Aij0 (u, ux, · · · )δ(x− y) + Aij
1 (u, ux, · · · )δ′(x− y)+
Aij2 (u, ux, · · · )δ′′(x− y) + · · ·+ Aij
p (u, ux, · · · )δ(p)(x− y),
(15.18) eq:h.15
i.e.:ui(x), uj(y) = P ij · δ(x− y), (15.19) eq:h.16
61

δ(x− y) being the Dirac δ-“function”.2) In the sequel we are going to look at evolutionary first order in time PDEs
(in one spatial dimension) as ODEs (i.e., vector fields) in the loop space M . Theidea is to regard the time coordinate of the function u(x, t) as the evolutionaryparameter associated with a vector field on a manifold.
3) Conserved quantities (i.e., integrals of the motion of an evolutionary PDEsuch as KdV) are expressed as conservation laws, i.e.,
d
dtQ =
d
dt
∫
S1
q(u, ux, · · · ) = 0 ⇔ d
dtq(u, ux, · · · ) =
d
dxJQ(u, ux, · · · ). (15.20) eq:h.17
for some suitable local density JQ(u, ux, · · · ).
15.1 Hamiltonian structure(s) of KdV
Let us consider the KdV equation
ut = 6uux − uxxx, (15.21) eq:h2.1
which we regard as a flow (that is, a vector field) in the loop space of C wenotice that it can be written as
ut =d
dx(3u2 − uxx). (15.22) eq:h2.2
Proposition 15.2 The Kdv equation is a Hamiltonian equation; indeed it canbe written as
ut = PdH, with P =d
dxand H [u] =
∫
S1
u3 +1
2u2
x. (15.23) eq:h2.3
Proof. In view of (eq:h2.215.22) we only have to prove that:
1. P =d
dxis a Poisson structure;
2.δH
δu(x)= (3u2 − uxx).
The second property was the upshot of the example of the previous section.
The first one is proved noticing thatd
dxis antysimmetric, and, being constant,
clearly satisfies the Jacobi property (see, also, the criterion (eq:h.1215.15).
Definition 15.3 The bracket u(x), u(y) = δ′(x − y) is called the Gardner-Zakharov-Faddev bracket.
62

We can find, by direct computation, a few conservation laws for KdV. The firstone is trivially
H−1[u] =
∫
S1
u(x)dx. (15.24) eq:h2.3
IndeeddH
dt −1=
∫
S1
utdx =
∫
S1
(3u2 − uxx)xdx = 0. (15.25) eq:h2.4
We notice thatδH−1
δu(x)= 1, and so H−1 is a Casimir of the Poisson bracket
P =d
dx.
The second integral can be obtained as follow: we multiply both sides of theKdV equation (
eq:h2.115.21) by u to get
1
2
du2
dt= uut = 6u2ux − uuxxx =
d
dx(2u3 − uuxx +
1
2u2
x). (15.26) eq:h2.5
Thus
H0 =
∫
S1
u2dx
is a second constant of the motion. Incidentally, these constructions show thatH−1, H0 and H1 =
∫S1 u
3 + 12u − x2 are mutually commuting. This asserion
is trivial for what H−1, · are concerned, since H−1 is a Casimir of the GFZbracket. To show that H1, H0 = 0 we remark that
δH0
δu(x)= u,
δH1
δu(x)= (3u2 − uxx).
So
H1, H0 =
∫
S1
((3u2 − uxx)
d
dxu)dx = −
∫
S1
(3u2 − uxx)xudx = 0, (15.27) eq:h2.6
where the last equality is just a rephrasing of the conservation law rule (eq:h2.515.26).
Actually, as we shall show in the next lectures, there is an infinity of mutuallycommuting conserved quantities for the KdV equation. We will discuss thisfundamental property ot the KdV equation in the framework of the bihamil-tonian setting for integrable systems
This setting was indeed introduced for the first time by Magri in 1978.The first observation in this respect is that the KdV equation can be written,
along with
ut =d
dx
δH1
δu(x),
in the following form, by means of the operator
P ′ = −1
2
d3
dx3+ 2u
d
dx+ ux, (15.28) eq:h2.6
63

as
ut =(− 1
2
d3
dx3+ 2u
d
dx+ ux
)2u = P ′ δ2H0
δu(x). (15.29) eq:h2.7
In the next subsection we will prove:
1. P ′ is a Poisson operator;
2. P and P ′ are compatible, that is, any linear combination ¶λ = P ′ − λP isstill a Poisson operator.
15.2 The bihamiltonian structure of KdV
The two facts about the Magri brackets induced by P ′ ((eq:h2.615.28)) could be proven
by means of straightforward computations, which we leave to the reader, usingthe criterion (
eq:h.1215.15). We will however prefer to frame the arguments within the
theory of Lie-Poisson brackets.Let V the (Witt or centerless Virasoro) algebra of complex-valued vector
fields on the circle S1, endowed with the usual commutator:
[f(x)d
dx, g(x)
d
dx] = [f(x)g′(x) − g(x)f ′(x)]
d
dx. (15.30) eq:h2.8
It is customary, especiallly in 2D Conformal Field Theory, endowe it with thebasis
ℓn = xn+1 d
dx, n ∈ Z ⇒ [ℓn, ℓm] = (m− n)ℓn+m, i.e. cnm
k = (m− n)δk,m+n,
(15.31) eq:k2.9
For every λ we can define the module Vλ for V ≡ V−1 as the space of λ-differentials, that is the space of expressions
ϕ(x)dxλ, (15.32) eq:h2.10
over which the Virasoro algebra acts by means of the Lie derivative:
X = f(x)d
dx,Φλ = ϕdxλ ⇒ X ·Φ−λ = (f(x)ϕ′(x)+λf ′(x)ϕ(x))dxλ. (15.33) eq:h2.11
Lemma 2 The dual V∗ of V coincides with the module V2 of second order dif-ferentials on S1.
Proof. We notice that there is a natural duality (between vector spaces) Vλ
and V1−λ, given by
〈ϕ(x)dxλ, ψ(x)dx1−λ〉 =
∫
S1
ϕ(x)ψ(x)dx, (15.34) eq:h2.11
64

where natural means that it is invariant under change of coordinates x→ y(x).We want to show that this pairing is a pairing in the sense of Lie-algebra mod-ules. So we have to show that, for all X ∈ V and Φ ∈ Vλ,Ψ ∈ V1−λ,
〈X · Φ,Ψ〉 + 〈Φ, X · Ψ〉 = 0. (15.35) eq:h2.12
comments?
We have
〈X · Φ,Ψ〉 + 〈Φ, X · Ψ〉 =∫
S1
((f(x)ϕ′(x) + λf ′(x)ϕ(x))ψ(x) + (f(x)ψ′(x) + (1 − λ)f ′(x)ψ(x))ϕ(x)) dx =∫
S1
(f(x)ϕ′(x)ψ(x) + f(x)ϕ(x)ψ′(x) + f ′(x)ϕ(x)ψ(x)) dx = 0.
(15.36) eq:h2.13
We next compute the Lie Poisson brackets associated with the Lie brackets ong = V. We recall that, if we identify V∗∗ ≃ V, and denote the differentials of
two functions F1, F2 as dFi = Xifi(x)d
dx, i = 1, 2, then
F1, F2LP (u) ≡ 〈< dF1, PLP · dF2〉 >= 〈u, [X1, X2]〉. (15.37) eq:h2.14
Hence:
〈u, [X1, X2]〉 =
∫
S1
u(x)(f1(x)f′2(x) − f ′
1(x)f2(x))dx =∫
S1
(f1(x)(2u(x)f′2(x) + u′(x)f2(x)))dx,
(15.38)
which yields
PLPV∗ = 2u(x)
d
dx+ ux(x). (15.39) eq:h2.15
We now give a few basic definitions of the bihamiltonian theory, recallingand amplifying a few notions given in Section check.
15.3 Schouten brackets and bihamiltonian manifold
Definition 15.4 Let P,Q be bivectors and vi, i = 1..3 1-forms on a manifoldM . The defnition:
〈[P,Q], v1∧v2∧v3 >= LPv1< Q, (v2, v3) > +LPv2
< Q, (v3, v1) > +LPv3< Q, (v1, v2) > +(P ↔ Q)(15.40) eq:sb.1
gives rise to a polyvector of order 3, which is called the Schouten bracket of Pand Q, and denoted with
[P,Q]S.
65

Thus, we can say that a bivector P is a Poisson bivector iff the Schouten bracketof P with itself [P, P ]S vanishes.
Let us now suppose that P,Q be Poisson bivectors on M ; we say that Pand Q are compatible, or that they form a bihamiltonian pair, if any linearcombination P − λQ vanishes for all λ is a Poisson bivector. Thanks to theobservation above, we can say that P and Q are compatible iff the Schoutenbracket [P,Q]S vainshes. Indeed, we have
[P − λQ, P − λQ]S = [P, P ]S − 2λ[P,Q]S + λ2[Q,Q]S = −2λ[P,Q]S
where the second equality holds thans to the symmetry of [P,Q]S, and the lastthanks to the fact that P and Q are Poisson bivectors.
The following criterion will be used in the sequel
Proposition 15.5 Two Poisson bivectors P and Q are compatible if and onlyif, for all function f ∈ C∞(M),
LPdfQ+ LQdfP = 0. (15.41) eq:h2.16
In the case of Poisson brackets defined on linear manifold, the criterion (eq:h2.1215.35)
for a bivector to be a Poisson bivector can be used to ascertain compatibility ofP and Q, since
[P,Q]S = 〈α,Q′Pβ(u; γ)〉+ 〈β,Q′
Pγ(u;α)〉+ 〈γ,Q′Pα(u; β)〉+ (P ↔ Q). (15.42) eq:h2.17
Let us now come back to
66

2
−2
∆(λ)
λλ
λ λ
λ 0
1 2
21
, ,
67

Figure 9: uu
t<<1
t = 0
t>>1
68









![On an integrable discretisation of the Lotka-Volterra system · all conserved quantities of the integrable system. This problem prompts a concept called integrable discretization[1].](https://static.fdocuments.us/doc/165x107/5f0ea3b77e708231d4403581/on-an-integrable-discretisation-of-the-lotka-volterra-all-conserved-quantities-of.jpg)