Tomaszewski, Mark - Thesis Slides: Application of Consumer-Off-The-Shelf (COTS) Devices to Human...
64
APPLICATION OF CONSUMER-OFF-THE-SHELF (COTS) DEVICES TO HUMAN MOTION ANALYSIS A Case Study in Proof-of-Concept Development Mark Tomaszewski February 2017 Master of Science Department of Mechanical and Aerospace Engineering University at Buffalo, State University of New York Presented on 13 January 2017
-
Upload
mark-tomaszewski -
Category
Engineering
-
view
50 -
download
1
Transcript of Tomaszewski, Mark - Thesis Slides: Application of Consumer-Off-The-Shelf (COTS) Devices to Human...

APPLICATION OFCONSUMER-OFF-THE-SHELF (COTS) DEVICES TO
HUMAN MOTION ANALYSIS
A Case Study in Proof-of-Concept Development
Mark Tomaszewski
February 2017
Master of Science
Department of Mechanical and Aerospace Engineering
University at Buffalo, State University of New York
Presented on 13 January 2017

Mark Tomaszewski13 January 2017 Slide 2 of 64
WHO AM I?
Two Years in ARMLAB
Commercial motion capture evaluation
Pelvic floorforce estimation Motion capture
experiments
Robotic systems
Fall 2014 …
… February 2017
Model basedvehicle dynamics

13 January 2017
Mark Tomaszewski
Slide 3 of 64
INTRODUCTION

Mark Tomaszewski13 January 2017 Slide 4 of 64
INTRODUCTION
Motivation
Human Motion Analysis
• Application domains• Skills training
• Rehabilitation therapy
• Advantages• Frequency
• Standardization
• Larger-scale deployment
• Requirements• Availability
• Deployability
• Accessibility
• Technical
Consumer Devices
• Available• Commercial supply chain
• Deployable• Commercial distribution
• Accessible• In use by target markets
• Low cost
• Technical challenges• Data quality
• Manufacturing variations
• Repeatability

Mark Tomaszewski13 January 2017 Slide 5 of 64
INTRODUCTION
Survey of Motion Capture Systems
Name Sensing Modality Cost Magnitude
Vicon Optical Markers $100,000
Motion Shadow Wearable IMU (Navigation grade)
$10,000
Kinect Vision(RGB & IR depth)
$100
Myo and Sphero Wearable IMU (Consumer grade)
$100

Mark Tomaszewski13 January 2017 Slide 6 of 64
INTRODUCTION
Consumer Devices – Comparison
Kinect (vision)
• Requires line of sight indoors
• Installed fixed to task space
• Data: translation, joint positions
• Errors caused by:• Occlusions
• Rotation parallel to image plane
Myo & Sphero (contact – IMU)
• Requires low EMI
• Installed fixed to subject
• Data: rotation, link orientations
• Errors caused by:• Sensor drift
• EMI (e.g. Myo vibration motor)

Mark Tomaszewski13 January 2017 Slide 7 of 64
INTRODUCTION
Outline
• BACKGROUND
• A brief introduction to Myo and Sphero
• SOFTWARE DEVELOPMENT
• MATLAB interface development for Myo and Sphero
• MATHEMATICAL METHODS
• Sensor data, kinematic modeling, model calibration, experiment analysis
• MOTION ANALYSIS
• Experiment implementation and analysis of results
• DISCUSSION

13 January 2017
Mark Tomaszewski
Slide 8 of 64
BACKGROUNDSOFTWARE DEVELOPMENTMATHEMATICAL METHODSMOTION ANALYSISDISCUSSION

Mark Tomaszewski13 January 2017 Slide 9 of 64
BACKGROUND
Myo and Sphero Hardware
Myo [1] (Thalmic Labs)
• Cortex M4 MCU
• MPU-9150 IMU (9 axis + DMP)
• 8 electromyography (EMG)
• Bluetooth Low Energy (BLE)
Sphero [2] (Sphero/Orbotix)
• Cortex M4 MCU
• Bosch BMI055 IMU (6 axis)
• Motors & Motor Driver
• Bluetooth Classic
Main board and batteries
EMG
IMUMCU
Bluetooth moduleMotors
MCU
IMU
Motor driver

Mark Tomaszewski13 January 2017 Slide 10 of 64
BACKGROUND
Myo and Sphero Firmware
Myo
• BLE GATT server
• Few configuration commands• Set lock policy, vibrate, …
• Data notify characteristics• Quaternion
• Gyroscope
• Accelerometer
• EMG
• Other state: pose, arm, xDir
Sphero
• Serial command/control server
• Many functions• Ping, Roll, ReadLocator,
SetDataStreaming
• Streaming data sources• Quaternion
• Gyroscope
• Accelerometer
• Odometry (position, velocity)
• Motor PWM/EMF

Mark Tomaszewski13 January 2017 Slide 11 of 64
BACKGROUND
Myo Software – Development Ecosystem
Operating System Language Dependencies Supported By
Windows C++ Myo SDKruntime library
Thalmic Labs
Mac OS X C++ Myo SDKframework
Thalmic Labs
iOS Objective-C MyoKitframework
Thalmic Labs
Android Java Java Library Thalmic Labs
Windows C#, .NET --- Community
Linux C, C++, Python --- Community
Mac OS X Objective-C --- Community
--- Unity, Python, Javascript, Ruby, Go, Haskell, Processing, Delphi, ROS, Arduino, MATLAB
--- Community
Software developed by Thalmic Labs [3] and Community [4] sources.

Mark Tomaszewski13 January 2017 Slide 12 of 64
BACKGROUND
Myo Software – Middleware Stack
Myo Device(Embedded Host Device)
Application Computer(Windows Client PC)
Platform SDK APIMiddleware
Low-Level API Middleware
MATLAB Interface
Embedded Application
Bluetooth Radio
Bluetooth Dongle(BLED112 Driver)
Myo Connect(Desktop Application)
Myo SDK(libmyo / C++ Bindings)
Myo SDK Implementation
Myo Data Provider
Bluetooth Radio
Bluetooth Library
Myo Data Consumer
myo_mex (MATLAB MEX Wrapper)
MyoMex Device Manager (MATLAB Class)
MyoData Device Data Interface (MATLAB Class)
User Software Vendor Software
Bluetooth Protocol [5]Bluetooth Protocol [5]

Mark Tomaszewski13 January 2017 Slide 13 of 64
BACKGROUND
Myo Software – API selection
Advantages DisadvantagesMyo SDK Vendor support
Hardware included with Myo No EMG data with multiple
Myo devicesBLE Protocol Free choice for all hardware and
software Code volume and complexity Not as easily deployable
Platform SDK API Middleware
MATLAB Interface
Myo SDK Implementation
myo_mex (MATLAB MEX Wrapper)
MyoMex Device Manager (MATLAB Class)
MyoData Device Data Interface (MATLAB Class)
Myo SDK MATLAB MEX Wrapper [6,7]

Mark Tomaszewski13 January 2017 Slide 14 of 64
BACKGROUND
Sphero Software – Support
Operating System Language Dependencies Supported ByiOS Objective-C RobotKit SDK framework Sphero
iOS Swift RobotKit SDK framework Sphero
Android Java RobotLibrary SDK jar library Sphero
--- Javascript Source code Community
Sphero Embedded Device
MATLAB Interface Application Computer(Mobile Host Device)
Embedded Application
Bluetooth Radio
Sphero (MATLAB Class)
SpheroCore (MATLAB Class)Sphero Low-Level Protocol
SpheroInterface (MATLAB Class)
ICInterface/Bluetooth (MATLAB Class)MATLAB Instrument Control Toolbox
Android / iOS SDKs
User Software Vendor SoftwareBluetooth Protocol [8]
Sphero API MATLAB SDK [9,10]

13 January 2017
Mark Tomaszewski
Slide 15 of 64
BACKGROUNDSOFTWARE DEVELOPMENTMATHEMATICAL METHODSMOTION ANALYSISDISCUSSION

Mark Tomaszewski13 January 2017 Slide 16 of 64
onRssi
onLock
onUnlock
onPair
onUnpair
onArmSync
onArmUnsync
onConnect
onDisconnect
onBatteryLevelReceived
onWarmupCompleted
onOrientationData
onAccelerometerData
onGyroscopeData
onEmgData
onPose
Callbacks
SOFTWARE DEVELOPMENT
Myo SDK [11] Concepts
• Event based API
• Application class DataCollector collector;
• Inherits from myo::DeviceListener
• Implement callbacks for data events, e.g. DataCollector::onEmgData(...,int8_t* emg)
• Register collector as a listener to myo::Hub* pHub;• pHub->addListener(&collector);
• The hub calls back into collectorwith new events
• Run the hub to trigger callbacks• pHub->run(duration) or pHub->runOnce(timeout)
• Boring details not shown here…• Boilerplate, error/validation checking, exception handling, etc.

Mark Tomaszewski13 January 2017 Slide 17 of 64
myo_class.hpp
SOFTWARE DEVELOPMENT
Myo SDK Implementation
• DataCollector receives data• Threaded myo::Hub::runOnce()with mutex!
• MyoData manages data• Owned by DataCollector
• Stores data in std::queue<T,std::deque<T>>
• Synchronizes queues
• DataCollector::getFrameXXX()
• Pops the oldest sample of data from IMU or EMG sources
• Reading of data queue with mutex!
• Interpolation of state data on IMU time base• IMU time (50Hz): quat, gyro, accel, pose, arm, xDir
• Synchronization of EMG data with two sample frames• EMG sample rate: 200Hz, frame rate: 100Hz

Mark Tomaszewski13 January 2017 Slide 18 of 64
SOFTWARE DEVELOPMENT
Myo MEX Implementation
• States: idle, streaming
• Transitions: start_streaming, get_streaming_data, stop_streaming• Plus init/delete to enter/exit the idle state
• Actions: begin/end thread and read data
MEX Function
Idle Streaming
start_streaming
init
delete
stop_streaming
Acquire MutexRead Data
Release Mutex
get_streaming_data
EndThread
BeginThread
mexLock()
mexUnlock()

Mark Tomaszewski13 January 2017 Slide 19 of 64
SOFTWARE DEVELOPMENT
Myo MEX Implementation
myo_mex.cpp

Mark Tomaszewski13 January 2017 Slide 20 of 64
%% Collect 5s of EMG data
mm = MyoMex();
pause(5);
emg = mm.myoData.emg_log;
mm.delete();
clear mm;
SOFTWARE DEVELOPMENT
Myo MATLAB Implementation
• MyoMex class managesmyo_mex()
• MATLAB timer usedto schedule data polling
• Calls into myo_mex() to fetchnew data
• MyoData class manages data• Owned by MyoMex
• Vectorized for multiple Myos
MyoMex
myo_mex(‘init’) Start TimerInstantiation
TimerFcn()
myo_mex(‘get_streaming_data’)
Deletion
myoData
myo_mex(‘stop_streaming’)
dataaddData()
MEX
quat
gyro
accel
emg
pose
myo_mex(‘delete’)
myo_mex(‘start_streaming’)

Mark Tomaszewski13 January 2017 Slide 21 of 64
SOFTWARE DEVELOPMENT
Myo MATLAB Implementation
MyoMex.m

Mark Tomaszewski13 January 2017 Slide 22 of 64
SOFTWARE DEVELOPMENT
Myo MATLAB Implementation
MyoData.m

Mark Tomaszewski13 January 2017 Slide 23 of 64
SOFTWARE DEVELOPMENT
Sphero API [12] Concepts
• Bluetooth SPP = stream of bytes
• Bluetooth protocol: packet structure
• Command (CMD): Client Sphero sets response behavior
• Response (RSP): Sphero Client only in response to a CMD
• Message (MSG): Sphero Client asynchronous
• Examples: Ping(), SetRGBLEDOutput(). Roll(), ReadLocator(), SetDataStreaming()
Packet Header Body CRC
CMD SOP1 SOP2 DID CID SEQ DLEN <DATA> CHK
RSP SOP1 SOP2 MRSP SEQ DLEN <DATA> CHK
MSG SOP1 SOP2 ID CODE DLENMSB
DLENLSB
<DATA> CHK

Mark Tomaszewski13 January 2017 Slide 24 of 64
SOFTWARE DEVELOPMENT
Sphero API – Communication Example
Client Sphero
SetDataStreaming() – raw & filtered accelerometer, one sample, one frame
FFh FFh 02h 11h 37h 0Ah 01h 90h 00h 01h E0h 00h E0h 00h 01h 58hCMD
SetDataStreaming() – acknowledgement
FFh FFh 00h 37h 01h C7hRSP
SetDataStreaming() – streaming data message
FFh FEh 03h 00h 0Dh 00h 00h 00h 0Ah 00h FBhFFh DFh 00h 76h 10h 24h
58h
MSG
T
I
M
E
Filtered:−0.010.031.01
𝑔
Raw:0
0.040.98
𝑔

Mark Tomaszewski13 January 2017 Slide 25 of 64
SOFTWARE DEVELOPMENT
Sphero MATLAB Implementation
Receiving RSP and MSG
Return
NewData
BytesAvailableFcn()
SpinProtocol()
num_bytes > 0Yes
No
RSP packet MSG packetNo
Yes
No
Accumulate num_bytes Accumulate num_bytes
Yes
Set response_packet Call MSG Handler
bt = Bluetooth(‘Sphero-WPP,1,...
‘BytesAvailableFcn’,@(src,evt)myFcn(src,evt);

Mark Tomaszewski13 January 2017 Slide 26 of 64
SOFTWARE DEVELOPMENT
Sphero MATLAB Implementation
Sending CMD
Return false
APIFunction WriteClientCommandPacket()
WaitForCommandResponse()
answer_flag No
Yes
response_packet No
Yes
No
Validate response_packetYes
Construct CMD packet
timeout
Write CMD packet
RSP data
Return false Return empty
Success Failure UnknownStatus:
pkt_ping = hex2dec({‘ff’,’ff’,’00’,’01’,’37’,’c6’});
fwrite(bt,pkt_ping,’uint8’);

Mark Tomaszewski13 January 2017 Slide 27 of 64
SOFTWARE DEVELOPMENT
Sphero MATLAB Implementation
SpheroCore.m & SpheroCoreConstants.m

Mark Tomaszewski13 January 2017 Slide 28 of 64
SOFTWARE DEVELOPMENT
Sphero Interface
• SpheroInterface inherits from SpheroCore
• Overloads and extends
• Right-handed coordinatesRoll() with negative heading
• heading_offset
RollWithOffset()
ConfigureLocatorWithOffset()
• Sphero inherits from SpheroInterface
• Intended to be user application class
• Add properties like userdata
• Add methods to accomplish specific tasks

Mark Tomaszewski13 January 2017 Slide 29 of 64
SOFTWARE DEVELOPMENT
Command Line Interfaces
Myo EMG Logger
DURATION = 5; % seconds
mm = MyoMex;
pause(DURATION);
emg = mm.myoData.emg_log;
time = mm.myoData.timeEMG_log;
mm.delete();
Sphero Gyroscope Logger
DURATION = 5; % seconds
RATE = 50; % Hz
sensors = {'gyro_raw','gyro_filt'};
s = Sphero('Sphero-WPP');
s.SetStabilization(false);
s.SetDataStreaming(RATE,RATE,DURATION,sens
ors);
pause(DURATION+1);
t = s.time_log;
gr = s.gyro_raw_log;
gf = s.gyro_filt_log;
s.SetStabilization(true);
s.delete();

Mark Tomaszewski13 January 2017 Slide 30 of 64
SOFTWARE DEVELOPMENT
Myo Graphical User Interface
LIVE
DEMODemo script relative path: demo\demo_script.m

Mark Tomaszewski13 January 2017 Slide 31 of 64
SOFTWARE DEVELOPMENT
Myo GUI – Backup
Quaternion
Gyroscope
Accelerometer
EMG
Pose
SpatialQuaternion
Visualization
Time history strip charts

Mark Tomaszewski13 January 2017 Slide 32 of 64
SOFTWARE DEVELOPMENT
Myo GUI – Backup
https://www.youtube.com/watch?v=pPh306IgEDo

Mark Tomaszewski13 January 2017 Slide 33 of 64
SOFTWARE DEVELOPMENT
Sphero GUI
Odometry Data
Vector DriveConnection Dialogue
Gyroscope
Accelerometer
SpatialQuaternion
Visualization
Time history strip charts

Mark Tomaszewski13 January 2017 Slide 34 of 64
SOFTWARE DEVELOPMENT
Sphero GUI – Backup
https://www.youtube.com/watch?v=YohxMa_z4Ww

Mark Tomaszewski13 January 2017 Slide 35 of 64
SOFTWARE DEVELOPMENT
Myo and Sphero Application
https://www.youtube.com/watch?v=4TJzZF22GnA

13 January 2017
Mark Tomaszewski
Slide 36 of 64
BACKGROUNDSOFTWARE DEVELOPMENTMATHEMATICAL METHODSMOTION ANALYSISDISCUSSION

Mark Tomaszewski13 January 2017 Slide 37 of 64
MATHEMATICAL METHODS
Nomenclature
• Coordinate frame given by a translation and rotation w.r.t. another
• Rotation 𝑹𝑖𝑗
transforms vectors from frame 𝑖 to frame 𝑗
• Displacement 𝑘𝒅𝑖𝑗
to frame 𝑖 from 𝑗 in components of 𝑘, 𝒅𝑖𝑗= 𝑗 𝒅𝑖
𝑗
• Relative position 𝒓𝐴/𝐵 to 𝐴 from 𝐵
• Root frame is the fixed frame 𝐹 with standard basis vectors 𝒆𝑥 𝒆𝑦 and 𝒆𝑧
• 𝒆𝑥 = 1 0 0 T, 𝒆𝑦 = 0 1 0 T, 𝒆𝑥 = 0 0 1 T
• Absolute orientation 𝑹𝑖 = 𝑹𝑖𝐹
• Dot product of 𝒖 and 𝒗 is 𝒖 ⋅ 𝒗 = 𝒖T𝒗 = 𝒗T𝒖
• Cross product of 𝒖 into 𝒗 is 𝒖 × 𝒗 = 𝒖 𝒗
• Where 𝒖 =
0 −𝑢𝑧 𝑢𝑦
𝑢𝑧 0 −𝑢𝑥
−𝑢𝑦 𝑢𝑥 0

Mark Tomaszewski13 January 2017 Slide 38 of 64
MATHEMATICAL METHODS
Working with Sensor Data
• Quaternion 𝒒 =𝑠𝒗
to rotation matrix 𝑹 𝒒
• 𝑹 𝒒 = 1 − 2𝒗T𝒗 𝑰3×3 + 2 𝒗𝒗T + 𝑠 𝒗
• Set home pose for sensor 𝑠 with inertial frame 𝑁𝑠 w.r.t. fixed frame 𝐹
• 𝑹𝑠𝑁𝑠 = 𝑹𝐹
𝑁𝑠𝑹𝑠𝐹 from loop closure
• Assume home pose given by 𝑹𝑠𝐹 = 𝑹𝑠
𝐹, with 𝑹𝑠𝐹 = 𝑰3×3 in this work
• Capture and store offset 𝑹𝐹𝑁𝑠 = 𝑹𝑠
𝑁𝑠 𝑹𝑠𝐹 T
= 𝑹𝑠𝑁𝑠𝑰3×3 = 𝑹𝑠
𝑁𝑠
• Remove offset to compute 𝑹𝑠𝐹 = 𝑹𝐹
𝑁𝑠T𝑹𝑠
𝑁𝑠
𝐹
𝑁𝑠 𝑠
𝑹𝑠𝐹𝑹𝐹
𝑁𝑠
𝑹𝑠𝑁𝑠

Mark Tomaszewski13 January 2017 Slide 39 of 64
MATHEMATICAL METHODS
Forward Kinematics
• Uses sensor data directly as a 9 DOF representation
• Point of interest is 𝒅𝑆𝐹 = 𝒍𝑈 + 𝒍𝐿 + 𝒍𝐻 + 𝒓𝑆
• 𝒅𝑆𝐹 = 𝑹𝑈𝒆𝑥𝑙𝑈 + 𝑹𝐿𝒆𝑥𝑙𝐿 + 𝑹𝐻𝒆𝑥𝑙𝐻 − 𝑹𝐻𝒆𝑧𝑟𝑠
• Home pose calibration:
• 𝑰3×3 = 𝑹𝑈𝐹 = 𝑹𝐿
𝐹 = 𝑹𝐻𝐹
Hand
𝒅𝑆𝐹
𝐹
𝒍𝑈
𝒍𝐿
𝒍𝐻
𝒓𝑆
𝑈
𝐿 𝐻
𝑆
Upper arm Lower arm
𝑹𝐹𝑁𝑈 = 𝑹𝑈
𝑁𝑈
𝑹𝐹𝑁𝐿 = 𝑹𝐿
𝑁𝐿
𝑹𝐹𝑁𝐻 = 𝑹𝐻
𝑁𝐻
during home pose
𝑹𝑈 = 𝑹𝐹𝑁𝑈
T𝑹𝑈
𝑁𝑈
𝑹𝐿 = 𝑹𝐹𝑁𝐿
T𝑹𝐿
𝑁𝐿
𝑹𝐻 = 𝑹𝐹𝑁𝐻
T𝑹𝐻
𝑁𝐻

Mark Tomaszewski13 January 2017 Slide 40 of 64
MATHEMATICAL METHODS
Inverse Kinematics – Euler Angles
• Compute Euler angles from joint rotation matrices 𝑹𝑈𝐹 𝑹𝐿
𝑈 and 𝑹𝐻𝐿
• Euler angle sequence 𝑖 − 𝑗 − 𝑘 rotates the proximal frame intrinsically about the axes 𝑖 𝑗 and 𝑘 through angles 𝜃1 𝜃2 and 𝜃3
• 𝑴𝑖𝑗𝑘 = 𝑴𝑖 𝜃1 𝑴𝑗 𝜃2 𝑴𝑘 𝜃3
• Composed rotation matrix for 𝑥 − 𝑦 − 𝑧 and 𝑧 − 𝑦 − 𝑥
• Calculation of Euler angles for 𝑥 − 𝑦 − 𝑧 and 𝑧 − 𝑦 − 𝑥
𝑴𝑥(𝜃 =1 0 00 𝑐𝜃 −𝑠𝜃0 𝑠𝜃 𝑐𝜃
𝑴𝑦 𝜃 =𝑐𝜃 0 𝑠𝜃0 1 0
−𝑠𝜃 0 𝑐𝜃
𝑴𝑧 𝜃 =𝑐𝜃 −𝑠𝜃 0𝑠𝜃 𝑐𝜃 00 0 1
𝑴𝑧𝑦𝑥 =
𝑐1𝑐2 −𝑠1𝑐3 + 𝑐1𝑠2𝑠3 𝑠1𝑠3 + 𝑐1𝑠2𝑐3𝑠1𝑐2 𝑐1𝑐3 + 𝑠1𝑠2𝑠3 −𝑐1𝑠3 + 𝑠1𝑠2𝑐3−𝑠2 𝑐2𝑠3 𝑐2𝑐3
𝑴𝑥𝑦𝑧 =
𝑐2𝑐3 −𝑐2𝑠3 𝑠2𝑐1𝑠3 + 𝑠1𝑠2𝑐3 𝑐1𝑐3 − 𝑠1𝑠2𝑠3 −𝑠1𝑐2𝑠1𝑠3 − 𝑐1𝑠2𝑐3 𝑠1𝑐3 + 𝑐1𝑠2𝑠3 𝑐1𝑐2
𝜃1 = atan2 −𝑚23, 𝑚33 = atan2 𝑠1𝑐2, 𝑐1𝑐2𝜃2 = asin 𝑚13 = asin 𝑠2𝜃3 = atan2 −𝑚12, 𝑚11 = atan2 −𝑐2𝑠3, −𝑐2𝑐3
𝑥−𝑦−𝑧
𝜃1 = atan2 𝑚21, 𝑚11 = atan2 𝑠1𝑐2, 𝑐1𝑐2𝜃2 = asin −𝑚31 = asin 𝑠2𝜃3 = atan2 𝑚32, 𝑚33 = atan2 𝑐2𝑠3, 𝑐2𝑐3
𝑧−𝑦−𝑥

Mark Tomaszewski13 January 2017 Slide 41 of 64
MATHEMATICAL METHODS
Inverse Kinematics – Joint Angles
• Reduction from 9 to 7 DOF
• Assume that 𝜃𝑒𝑦 ≈ 0 (physical/anatomical constraint)
• Compute 𝜙𝑒𝑥 = 𝜃𝑒𝑥 + 𝜃𝑤𝑥 to combine rotations about the same axis
• Joint angles: 𝜃𝑠𝑧 , 𝜃𝑠𝑦, 𝜃𝑠𝑥, 𝜃𝑒𝑧, 𝜙𝑒𝑥 𝜃𝑤𝑦, and 𝜃𝑤𝑧
• Reconstruction of forward kinematics
• Compute 𝑴𝑖𝑗𝑘 with 𝜃𝑒𝑦 = 0 for 𝑹𝑈𝐹 𝑹𝐿
𝑈 and 𝑹𝐻𝐿
Joint 𝒊 − 𝒋 − 𝒌 𝑴𝒊𝒋𝒌 𝜽𝟏 𝜽𝟐 𝜽𝟑
Shoulder 𝑧 − 𝑦 − 𝑥 𝑹𝑈𝐹 𝜃𝑠𝑧 𝜃𝑠𝑦 𝜃𝑠𝑥
Elbow 𝑧 − 𝑦 − 𝑥 𝑹𝐿𝑈 𝜃𝑒𝑧 𝜃𝑒𝑦 𝜃𝑒𝑥
Wrist 𝑥 − 𝑦 − 𝑧 𝑹𝐻𝐿 𝜃𝑤𝑥 𝜃𝑤𝑦 𝜃𝑤𝑧

Mark Tomaszewski13 January 2017 Slide 42 of 64
MATHEMATICAL METHODS
Calibration – Problem Setup
• Determine segment lengths 𝑙𝑈 𝑙𝐿 and 𝑙𝐻 and pose of task frame 𝑇
• Introduce calibration points 𝐶1 𝐶2 and 𝐶3 in physical calibration jig
• Minimize the error vector 𝝐 over many realizations at each of 3 points 𝐶𝑖
𝒅𝐶1
𝐹
𝒅𝐶2
𝐹
𝒅𝐶3
𝐹
𝐹
𝐶1 𝐶3
𝐶2
𝑇
Hand
𝒅𝑆𝐹
𝐹
𝒍𝑈
𝒍𝐿
𝒍𝐻
𝒓𝑆
𝑈
𝐿 𝐻
𝑆
Upper arm Lower arm
𝒅𝐶𝑖
𝐹 𝝐

Mark Tomaszewski13 January 2017 Slide 43 of 64
• Start with realization 𝑘 at point 𝑖
• Write for 𝑘 ∈ 𝐾 = 1,2, … , 𝑃𝑖
• Write for 𝑖 = 1,2,3 and assemble
• Objective function 𝑓 𝒙 = 𝝐𝐺T𝝐𝐺 = 𝒙T𝑨𝐺
T𝑨𝐺𝒙 − 2𝒃𝐺T𝑨𝐺𝒙 + 𝒃𝐺
T𝒃𝐺
MATHEMATICAL METHODS
Calibration – Objective Function
−𝝐𝐾𝑖 =
𝑨1𝑖 −𝑰⋮ ⋮
𝑨𝑘𝑖 −𝑰⋮ ⋮
𝑨𝑃𝑖𝑖 −𝑰
𝒍𝒅𝐶𝑖
𝐹 −
𝒃1𝑖
⋮𝒃𝑘𝑖
⋮𝒃𝑃𝑖𝑖
= 𝑨𝐾𝑖 −𝑰3𝑃𝑖×3𝒍
𝒅𝐶𝑖
𝐹 − 𝒃𝐾𝑖
−𝝐𝐺 =
𝑨𝐾1 −𝑰3𝑃1×3 0 0
𝑨𝐾2 0 −𝑰3𝑃2×3 0
𝑨𝐾3 0 0 −𝑰3𝑃3×3
𝒍𝒅𝐶1
𝐹
𝒅𝐶2
𝐹
𝒅𝐶3
𝐹
−
𝒃𝐾1
𝒃𝐾2
𝒃𝐾3
= 𝑨𝐺𝒙 − 𝒃𝐺
−𝝐𝑘𝑖= 𝒅𝑆𝐹 − 𝒅𝐶𝑖
𝐹 = 𝑹𝑈𝒆𝑥 𝑹𝐿𝒆𝑥 𝑹𝐻𝒆𝑥 −𝑰3×3
𝑙𝑈𝑙𝐿𝑙𝐻𝒅𝐶𝑖
𝐹
− 𝑹𝐻𝒆𝑧𝑟𝑠 = 𝑨𝑘𝑖 −𝑰3×3𝒍
𝒅𝐶𝑖
𝐹 − 𝒃𝑘𝑖
Mark Tomaszewski13 January 2017 Slide 44 of 64
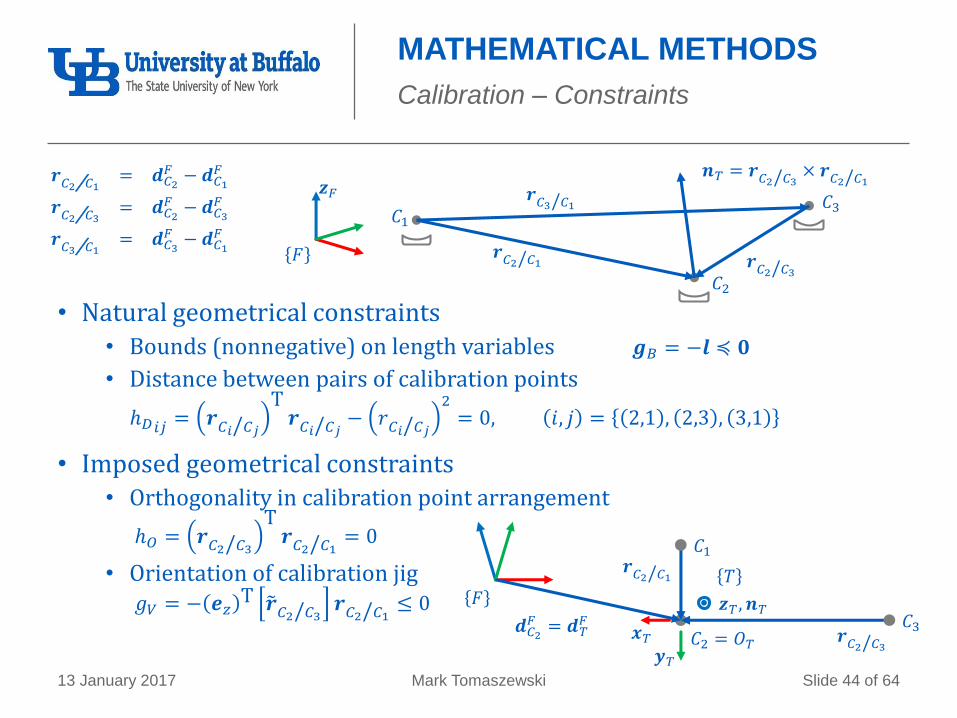
MATHEMATICAL METHODS
Calibration – Constraints
• Natural geometrical constraints• Bounds (nonnegative) on length variables 𝒈𝐵 = −𝒍 ≼ 𝟎
• Distance between pairs of calibration points
ℎ𝐷𝑖𝑗 = 𝒓𝐶𝑖/𝐶𝑗
T𝒓𝐶𝑖/𝐶𝑗
− 𝑟𝐶𝑖/𝐶𝑗
2= 0, 𝑖, 𝑗 = 2,1 , 2,3 , 3,1
• Imposed geometrical constraints• Orthogonality in calibration point arrangement
ℎ𝑂 = 𝒓𝐶2/𝐶3
T𝒓𝐶2/𝐶1
= 0
• Orientation of calibration jig𝑔𝑉 = − 𝒆𝑧
T 𝒓𝐶2/𝐶3𝒓𝐶2/𝐶1
≤ 0
𝒓𝐶2/𝐶1
𝐶1
𝐶3
𝐶2
𝒓𝐶2/𝐶3
𝒓𝐶3/𝐶1
𝒏𝑇 = 𝒓𝐶2/𝐶3× 𝒓𝐶2/𝐶1
𝐹
𝒛𝐹𝒓𝐶2/𝐶1
= 𝒅𝐶2
𝐹 − 𝒅𝐶1
𝐹
𝒓𝐶2/𝐶3= 𝒅𝐶2
𝐹 − 𝒅𝐶3
𝐹
𝒓𝐶3/𝐶1= 𝒅𝐶3
𝐹 − 𝒅𝐶1
𝐹
𝒙𝑇
𝐹𝑇
𝒅𝐶2
𝐹 = 𝒅𝑇𝐹 𝐶3
𝐶2 = 𝑂𝑇
𝐶1
𝒚𝑇
𝒛𝑇 , 𝒏𝑇
𝒓𝐶2/𝐶1
𝒓𝐶2/𝐶3

Mark Tomaszewski13 January 2017 Slide 45 of 64
MATHEMATICAL METHODS
Calibration – Constraints
Distance
ℎ𝐷𝑖𝑗 = 𝒓𝐶𝑖/𝐶𝑗
T𝒓𝐶𝑖/𝐶𝑗
− 𝑟𝐶𝑖/𝐶𝑗
2= 0, 𝑖, 𝑗 = 2,1 , 2,3 , 3,1
ℎ𝐷21=
1
2𝒙T𝑸21𝒙 − 𝑟𝐶2/𝐶1
2
ℎ𝐷23=
1
2𝒙T𝑸23𝒙 − 𝑟𝐶2/𝐶3
2
ℎ𝐷31=
1
2𝒙T𝑸31𝒙 − 𝑟𝐶3/𝐶1
2
𝑸21 = 2
03×3 …⋮ 𝑰3×3 −𝑰3×3
−𝑰3×3 𝑰3×3 ⋮… 03×3 12×12
𝑸23 = 2
03×3 …⋮ 03×3 …
⋮ 𝑰3×3 −𝑰3×3
−𝑰3×3 𝑰3×3 12×12
𝑸31 = 2
03×3 …⋮ 𝑰3×3 ⋮ −𝑰3×3
… 03×3 …−𝑰3×3 ⋮ 𝑰3×3 12×12

Mark Tomaszewski13 January 2017 Slide 46 of 64
MATHEMATICAL METHODS
Calibration – Constraints
Orthogonality ℎ𝑂 = 𝒓𝐶2/𝐶3
T𝒓𝐶2/𝐶1
= 0
Orientation (vertical) 𝑔𝑉 = − 𝒆𝑧T 𝒓𝐶2/𝐶3
𝒓𝐶2/𝐶1≤ 0
ℎ𝑂 =1
2𝒙T𝑸𝑂𝒙 𝑸𝑂 =
03×3 …⋮ 03×3 −𝑰3×3 𝑰3×3
−𝑰3×3 2𝑰3×3 −𝑰3×3
𝑰3×3 −𝑰3×3 03×3
𝑔𝑉 = −1
2𝒙T𝑸𝑉𝒙 𝑸𝑉 =
03×3 …⋮ 03×3 −𝑺𝑧 𝑺𝑧
−𝑺𝑧 03×3 −𝑺𝑧
𝑺𝑧 −𝑺𝑧 03×3
𝑺𝑧 = 𝒆𝑧

Mark Tomaszewski13 January 2017 Slide 47 of 64
MATHEMATICAL METHODS
Calibration – Summary
Function Name Count Linearity Type𝒈𝐵 Bounds 3 Constant Inequalityℎ𝐷 ⋅⋅
Distance 3 Quadratic Equality
ℎ𝑂 Orthogonality 1 Quadratic Equality𝒉𝑃 Planar 2 Linear Equalityℎ𝐻 ⋅
Normal Vector Horizontal 2 Quadratic Equality
ℎ𝑉 Normal Vector Vertical1 Quadratic Equality
𝑔𝑉 1 Quadratic Inequality
minimize𝒙
𝑓 𝒙
subject to 𝒈𝐵 ≼ 0𝑔𝑉 ≤ 0ℎ𝐷21
= 0
ℎ𝐷23= 0
ℎ𝐷31= 0
ℎ𝑂 = 0

Mark Tomaszewski13 January 2017 Slide 48 of 64
MATHEMATICAL METHODS
Experiment Protocol
Timed progression through states home, calib, and reach
State Location Durationhome t-pose ---idle --- 2scalib 𝐶1 3sidle --- 2sreach 𝐶1 → 𝐶2 3sidle --- 2scalib 𝐶2 3sidle --- 2sreach 𝐶2 → 𝐶3 3sidle --- 2scalib 𝐶3 3sidle --- 2sreach 𝐶3 → 𝐶1 3sidle --- 2scalib 𝐶2 3s

Mark Tomaszewski13 January 2017 Slide 49 of 64
MATHEMATICAL METHODS
Experiment Analysis
• Plane error 𝒆𝑝 = 𝒓𝑆/𝑃 = 𝒏𝑖𝑗T𝒓𝑆/𝐶𝑖
𝒏𝑖𝑗
• Disparity of 𝒅𝑆𝐹 calculated from inverse kinematics solution
𝐹
𝐶𝑗
𝐶𝑖
𝑆
𝑃
𝒓𝐶𝑖/𝐶𝑗
𝒏𝑖𝑗
𝒅𝑆𝐹
𝒅𝐶𝑖
𝐹
𝒅𝐶𝑗
𝐹
𝒓𝑃/𝐶𝑖
𝒓𝑆/𝑃
𝒓𝑆/𝐶𝑖
𝑇𝒛𝑇 𝒏𝑖𝑗 =𝒓𝐶𝑖/𝐶𝑗
× 𝒛𝑇
𝒓𝐶𝑖/𝐶𝑗× 𝒛𝑇
𝒅𝑆𝐹 = 𝒅𝐶𝑖
𝐹 + 𝒓𝑆/𝐶𝑖

13 January 2017
Mark Tomaszewski
Slide 50 of 64
BACKGROUNDSOFTWARE DEVELOPMENTMATHEMATICAL METHODSMOTION ANALYSISDISCUSSION

Mark Tomaszewski13 January 2017 Slide 51 of 64
MOTION ANALYSIS
Experimental Setup
Calibration Fixture Experiment Environment
Calibration Jig
𝐹
𝑇
𝐶3
𝐶2
𝐶1
𝒅𝑇𝐹

Mark Tomaszewski13 January 2017 Slide 52 of 64
MOTION ANALYSIS
Data Collection
https://www.youtube.com/watch?v=uJLlz2ibIYs

Mark Tomaszewski13 January 2017 Slide 53 of 64
MOTION ANALYSIS
Data Processing & Calibration
• 10 (9) trials choose 5
• Segment data: calib, reach
• Optimize on calib data• Make params struct
• Use fmincon()with SQP
• Successful for all calib data
• Update model with optimal values𝒍 𝒅𝑇
𝐹 and 𝑹𝑇𝐹
Trial Iterations Objective Function 1st Order Optimality Constraint Violation1 19 624005 0.00183 3.78E-082 23 539047 0.00021 9.54E-093 20 533839 0.00204 4.64E-084 24 554550 0.00357 5.12E-085 20 567094 0.00181 7.14E-09
https://www.youtube.com/watch?v=uJLlz2ibIYs

Mark Tomaszewski13 January 2017 Slide 54 of 64
MOTION ANALYSIS
Data Processing & Calibration
Calibration Result Invariants
Trial Upper 𝒍𝑼 mm
Lower 𝒍𝑳 mm
Hand𝒍𝑯 mm
Total𝒍𝑼 + 𝒍𝑳 + 𝒍𝑯 mm
1 300 239 87 627
2 319 228 55 603
3 347 206 70 623
4 325 216 78 619
5 317 218 79 615
minimummeanmaximum
300322347
206221239
557487
603617627
44%15% 4%range/mean

Mark Tomaszewski13 January 2017 Slide 55 of 64
MOTION ANALYSIS
Data Calibration
https://www.youtube.com/watch?v=uJLlz2ibIYs

Mark Tomaszewski13 January 2017 Slide 56 of 64
MOTION ANALYSIS
Data Analysis Results
Plane Error 𝑒𝑝 = 𝒆𝑝
• Bounds: 8cm, 4cm
• Effect of calibration error
𝐶𝑖𝐶𝑗
𝑒𝑝
𝐶𝑖𝐶𝑗
𝑒𝑝
4cm
8cm

Mark Tomaszewski13 January 2017 Slide 57 of 64
MOTION ANALYSIS
Data Analysis Results
Inverse Kinematics
• Joint angles valid, 𝜃𝑒𝑦 ≈ 0
• Reconstruction error bounds: 3.5cm
3.5cm
𝜃𝑒𝑦 ≈ 0

13 January 2017
Mark Tomaszewski
Slide 58 of 64
BACKGROUNDSOFTWARE DEVELOPMENTMATHEMATICAL METHODSMOTION ANALYSISDISCUSSION

Mark Tomaszewski13 January 2017 Slide 59 of 64
DISCUSSION
Summary of Contributions
1. Myo SDK MATLAB MEX Wrapper• First with streaming data
• 21 5 star ratings
• >50 DL/month
• ≈500 DLs
2. Sphero API MATLAB SDK• First full implementation of Sphero API
• 5 star rating
• ≈150 DLs
3. Model for end-to-end development cycle for COTS applications• Software/middleware
• Modeling: calibration, analysis, evaluation
• Implementation of proposed system

Mark Tomaszewski13 January 2017 Slide 60 of 64
DISCUSSION
Challenges and Future Work
• Myo EMG data with multiple devices• Create new middleware supporting one dongle per Myo
• Replace Myo SDK with: BLE radio + protocol + library and data provider
• Sphero code performance synchronization issues• MATLAB Bluetooth object overhead
• Move API implementation into MEX with third party Bluetooth library
• Accuracy of results• Possibly due to Sphero code performance
• Experimental setup configuration of calibration fixtures
• Experimental protocol (t-pose)
• Sensing modality• Incorporate translational information from vision based solution
• Evolve modeling to include Kinect data

Mark Tomaszewski13 January 2017 Slide 61 of 64
ACKNOWLEDGEMENTS
Thank you so very much!
Advisor Committee Members
Colleagues and Labmates:
Matthias Schmid, S.K. Jun, Xiaobo Zhou, Michael Anson, Yin Chi Chen, Suren Kumar, Javad Sovizi, Ali Alamdari, and many more!
Venkat Krovi Ehsan EsfahaniGary Dargush

Mark Tomaszewski13 January 2017 Slide 62 of 64
REFERENCES
[1] B. Stern, "Inside Myo | Myo Armband Teardown | Adafruit Learning System," Adafruit Industries, 3 February 2016. [Online]. Available: https://learn.adafruit.com/myo-armband-teardown/inside-myo. [Accessed 6 January 2017].
[2] E. White, "Disassembling BB8 (Part 2) | element14 | chriswhite," Element 14: A Premier Farnell Company, 17 September 2015. [Online]. Available: https://www.element14.com/community/blogs/linker/2015/09/17/disassembling-bb8-part2. [Accessed 6 January 2017].
[3] developer.thalmic.com, "Thalmic Labs - Maker of Myo gesture control armband," Thalmic Labs, 2016. [Online]. Available: https://developer.thalmic.com/downloads. [Accessed 8 December 2016].
[4] developer.thalmic.com, "Thalmic Labs Developer Forum / Tools and Bindings / List of Unofficial Tools and Bindings," Thalmic Labs, 2016. [Online]. Available: https://developer.thalmic.com/forums/topic/541/. [Accessed 8 December 2016].
[5] thalmiclabs, "myo-bluetooth/myohw.h at master · thalmiclabs/myo-bluetooth," 28 September 2015. [Online]. Available: https://github.com/thalmiclabs/myo-bluetooth/blob/master/myohw.h. [Accessed 8 December 2016].
[6] M. Tomaszewski, "Myo SDK MATLAB MEX Wrapper," The MathWorks, Inc., 7 March 2016. [Online]. Available: https://www.mathworks.com/matlabcentral/fileexchange/55817-myo-sdk-matlab-mex-wrapper. [Accessed 7 January 2017].
[7] M. Tomaszewski, "mark-toma/MyoMex: Access data from Thalmic Labs' Myo Gesture Control Armband in m-code!," GitHub, 20 November 2016. [Online]. Available: https://github.com/mark-toma/MyoMex. [Accessed 26 December 2016].
[8] Orbotix, "Sphero API 1.50," 20 August 2013. [Online]. Available: https://github.com/orbotix/DeveloperResources/blob/master/docs/Sphero_API_1.50.pdf. [Accessed 8 January 2017].
[9] M. Tomaszewski, "Sphero API MATLAB SDK - File Exchange - MATLAB Central," The MathWorks, Inc., 30 August 2015. [Online]. Available: https://www.mathworks.com/matlabcentral/fileexchange/52746-sphero-api-matlab-sdk. [Accessed 7 January 2017].
[10] M. Tomaszewski, "mark-toma/SpheroMATLAB: Control Sphero from MATLAB in m-code!," GitHub, Inc., 17 August 2016. [Online]. Available: https://github.com/mark-toma/SpheroMATLAB. [Accessed 26 December 2016].
[11] developer.thalmic.com, "Myo SDK 0.9.0: Myo SDK Manual," Thalmic Labs, 2014. [Online]. Available: https://developer.thalmic.com/docs/api_reference/platform/index.html. [Accessed 8 December 2016].
[12] sdk.sphero.com, "Sphero Docs | Getting Started," Sphero, 2016. [Online]. Available: http://sdk.sphero.com/sdk-documentation/getting-started/. [Accessed 8 December 2016].

13 January 2017
Mark Tomaszewski
Slide 63 of 64
THANK YOU!

Mark Tomaszewski13 January 2017 Slide 64 of 64
CONTACT
Email: [email protected] | [email protected]
Web: http://www.mark-toma.com
http://wiki.mark-toma.com
GitHub: https://github.com/mark-toma
MATLAB Central:
https://www.mathworks.com/matlabcentral/profile/authors/4540343-mark-tomaszewski