Thumbnail -...
30
Transcript of Thumbnail -...

File Attachment
Thumbnailjpg
Shape Memory AlloyActuators
Shape Memory AlloyActuatorsDesign Fabrication andExperimental Evaluation
Mohammad H ElahiniaDepartment of Mechanical Industrial andManufacturing EngineeringUniversity of Toledo Toledo OH USA
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQUnited Kingdom
For details of our global editorial offices for customer services and for information about howto apply for permission to reuse the copyright material in this book please see our websiteat wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordancewith the Copyright Designs and Patents Act 1988
All rights reserved No part of this publicationmay be reproduced stored in a retrieval system ortransmitted in any form or by any means electronic mechanical photocopying recording orotherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without theprior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in printmay not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarksAll brand names and product names used in this book are trade names servicemarks trademarksor registered trademarks of their respective owners The publisher is not associated with anyproduct or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their bestefforts in preparing this book they make no representations or warranties with respect to theaccuracy or completeness of the contents of this book and specifically disclaim any impliedwarranties of merchantability or fitness for a particular purpose It is sold on the understandingthat the publisher is not engaged in rendering professional services and neither the publisher northe author shall be liable for damages arising herefrom If professional advice or other expertassistance is required the services of a competent professional should be sought
Library of Congress Cataloging-in-Publication Data
Elahinia Mohammad HShapememory alloy actuators design fabrication and experimental evaluation Mohammad
Elahinia Department of Mechanical Engineering University of Toledo Toledo OH USApages cm
Includes bibliographical references and indexISBN 978-1-118-35944-0 (cloth)
1 ActuatorsndashMaterials 2 Shape memory alloys I TitleTJ223A25E43 2015621ndashdc23
2015013573
A catalogue record for this book is available from the British Library
Set in 10125pt Palatino by SPi Global Pondicherry India
1 2016
Contents
List of Contributors vii
Preface xi
Acknowledgments xiii
1 Introduction 1Christoph Haberland Mahmoud Kadkhodaei andMohammad H Elahinia
2 Mathematical Modeling and Simulation 45Reza Mirzaeifar and Mohammad H Elahinia
3 SMA Actuation Mechanisms 85Masood Taheri Andani Francesco Bucchi andMohammad H Elahinia
4 Control of SMA Actuators 125Hashem Ashrafiuon and Mohammad H Elahinia
5 Fatigue of Shape Memory Alloys 155Mohammad J Mahtabi Nima Shamsaei andMohammad H Elahinia
6 Fabricating NiTi SMA Components 191Christoph Haberland and Mohammad H Elahinia
7 Experimental Characterization of Shape Memory Alloys 239Ali S Turabi Soheil Saedi Sayed Mohammad SaghaianHaluk E Karaca and Mohammad H Elahinia
Index 279
List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
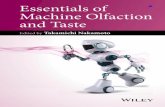
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
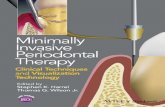
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
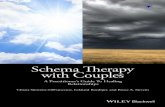
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Shape Memory AlloyActuators
Shape Memory AlloyActuatorsDesign Fabrication andExperimental Evaluation
Mohammad H ElahiniaDepartment of Mechanical Industrial andManufacturing EngineeringUniversity of Toledo Toledo OH USA
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQUnited Kingdom
For details of our global editorial offices for customer services and for information about howto apply for permission to reuse the copyright material in this book please see our websiteat wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordancewith the Copyright Designs and Patents Act 1988
All rights reserved No part of this publicationmay be reproduced stored in a retrieval system ortransmitted in any form or by any means electronic mechanical photocopying recording orotherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without theprior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in printmay not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarksAll brand names and product names used in this book are trade names servicemarks trademarksor registered trademarks of their respective owners The publisher is not associated with anyproduct or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their bestefforts in preparing this book they make no representations or warranties with respect to theaccuracy or completeness of the contents of this book and specifically disclaim any impliedwarranties of merchantability or fitness for a particular purpose It is sold on the understandingthat the publisher is not engaged in rendering professional services and neither the publisher northe author shall be liable for damages arising herefrom If professional advice or other expertassistance is required the services of a competent professional should be sought
Library of Congress Cataloging-in-Publication Data
Elahinia Mohammad HShapememory alloy actuators design fabrication and experimental evaluation Mohammad
Elahinia Department of Mechanical Engineering University of Toledo Toledo OH USApages cm
Includes bibliographical references and indexISBN 978-1-118-35944-0 (cloth)
1 ActuatorsndashMaterials 2 Shape memory alloys I TitleTJ223A25E43 2015621ndashdc23
2015013573
A catalogue record for this book is available from the British Library
Set in 10125pt Palatino by SPi Global Pondicherry India
1 2016
Contents
List of Contributors vii
Preface xi
Acknowledgments xiii
1 Introduction 1Christoph Haberland Mahmoud Kadkhodaei andMohammad H Elahinia
2 Mathematical Modeling and Simulation 45Reza Mirzaeifar and Mohammad H Elahinia
3 SMA Actuation Mechanisms 85Masood Taheri Andani Francesco Bucchi andMohammad H Elahinia
4 Control of SMA Actuators 125Hashem Ashrafiuon and Mohammad H Elahinia
5 Fatigue of Shape Memory Alloys 155Mohammad J Mahtabi Nima Shamsaei andMohammad H Elahinia
6 Fabricating NiTi SMA Components 191Christoph Haberland and Mohammad H Elahinia
7 Experimental Characterization of Shape Memory Alloys 239Ali S Turabi Soheil Saedi Sayed Mohammad SaghaianHaluk E Karaca and Mohammad H Elahinia
Index 279
List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Shape Memory AlloyActuatorsDesign Fabrication andExperimental Evaluation
Mohammad H ElahiniaDepartment of Mechanical Industrial andManufacturing EngineeringUniversity of Toledo Toledo OH USA
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQUnited Kingdom
For details of our global editorial offices for customer services and for information about howto apply for permission to reuse the copyright material in this book please see our websiteat wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordancewith the Copyright Designs and Patents Act 1988
All rights reserved No part of this publicationmay be reproduced stored in a retrieval system ortransmitted in any form or by any means electronic mechanical photocopying recording orotherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without theprior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in printmay not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarksAll brand names and product names used in this book are trade names servicemarks trademarksor registered trademarks of their respective owners The publisher is not associated with anyproduct or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their bestefforts in preparing this book they make no representations or warranties with respect to theaccuracy or completeness of the contents of this book and specifically disclaim any impliedwarranties of merchantability or fitness for a particular purpose It is sold on the understandingthat the publisher is not engaged in rendering professional services and neither the publisher northe author shall be liable for damages arising herefrom If professional advice or other expertassistance is required the services of a competent professional should be sought
Library of Congress Cataloging-in-Publication Data
Elahinia Mohammad HShapememory alloy actuators design fabrication and experimental evaluation Mohammad
Elahinia Department of Mechanical Engineering University of Toledo Toledo OH USApages cm
Includes bibliographical references and indexISBN 978-1-118-35944-0 (cloth)
1 ActuatorsndashMaterials 2 Shape memory alloys I TitleTJ223A25E43 2015621ndashdc23
2015013573
A catalogue record for this book is available from the British Library
Set in 10125pt Palatino by SPi Global Pondicherry India
1 2016
Contents
List of Contributors vii
Preface xi
Acknowledgments xiii
1 Introduction 1Christoph Haberland Mahmoud Kadkhodaei andMohammad H Elahinia
2 Mathematical Modeling and Simulation 45Reza Mirzaeifar and Mohammad H Elahinia
3 SMA Actuation Mechanisms 85Masood Taheri Andani Francesco Bucchi andMohammad H Elahinia
4 Control of SMA Actuators 125Hashem Ashrafiuon and Mohammad H Elahinia
5 Fatigue of Shape Memory Alloys 155Mohammad J Mahtabi Nima Shamsaei andMohammad H Elahinia
6 Fabricating NiTi SMA Components 191Christoph Haberland and Mohammad H Elahinia
7 Experimental Characterization of Shape Memory Alloys 239Ali S Turabi Soheil Saedi Sayed Mohammad SaghaianHaluk E Karaca and Mohammad H Elahinia
Index 279
List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQUnited Kingdom
For details of our global editorial offices for customer services and for information about howto apply for permission to reuse the copyright material in this book please see our websiteat wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordancewith the Copyright Designs and Patents Act 1988
All rights reserved No part of this publicationmay be reproduced stored in a retrieval system ortransmitted in any form or by any means electronic mechanical photocopying recording orotherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without theprior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in printmay not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarksAll brand names and product names used in this book are trade names servicemarks trademarksor registered trademarks of their respective owners The publisher is not associated with anyproduct or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their bestefforts in preparing this book they make no representations or warranties with respect to theaccuracy or completeness of the contents of this book and specifically disclaim any impliedwarranties of merchantability or fitness for a particular purpose It is sold on the understandingthat the publisher is not engaged in rendering professional services and neither the publisher northe author shall be liable for damages arising herefrom If professional advice or other expertassistance is required the services of a competent professional should be sought
Library of Congress Cataloging-in-Publication Data
Elahinia Mohammad HShapememory alloy actuators design fabrication and experimental evaluation Mohammad
Elahinia Department of Mechanical Engineering University of Toledo Toledo OH USApages cm
Includes bibliographical references and indexISBN 978-1-118-35944-0 (cloth)
1 ActuatorsndashMaterials 2 Shape memory alloys I TitleTJ223A25E43 2015621ndashdc23
2015013573
A catalogue record for this book is available from the British Library
Set in 10125pt Palatino by SPi Global Pondicherry India
1 2016
Contents
List of Contributors vii
Preface xi
Acknowledgments xiii
1 Introduction 1Christoph Haberland Mahmoud Kadkhodaei andMohammad H Elahinia
2 Mathematical Modeling and Simulation 45Reza Mirzaeifar and Mohammad H Elahinia
3 SMA Actuation Mechanisms 85Masood Taheri Andani Francesco Bucchi andMohammad H Elahinia
4 Control of SMA Actuators 125Hashem Ashrafiuon and Mohammad H Elahinia
5 Fatigue of Shape Memory Alloys 155Mohammad J Mahtabi Nima Shamsaei andMohammad H Elahinia
6 Fabricating NiTi SMA Components 191Christoph Haberland and Mohammad H Elahinia
7 Experimental Characterization of Shape Memory Alloys 239Ali S Turabi Soheil Saedi Sayed Mohammad SaghaianHaluk E Karaca and Mohammad H Elahinia
Index 279
List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Contents
List of Contributors vii
Preface xi
Acknowledgments xiii
1 Introduction 1Christoph Haberland Mahmoud Kadkhodaei andMohammad H Elahinia
2 Mathematical Modeling and Simulation 45Reza Mirzaeifar and Mohammad H Elahinia
3 SMA Actuation Mechanisms 85Masood Taheri Andani Francesco Bucchi andMohammad H Elahinia
4 Control of SMA Actuators 125Hashem Ashrafiuon and Mohammad H Elahinia
5 Fatigue of Shape Memory Alloys 155Mohammad J Mahtabi Nima Shamsaei andMohammad H Elahinia
6 Fabricating NiTi SMA Components 191Christoph Haberland and Mohammad H Elahinia
7 Experimental Characterization of Shape Memory Alloys 239Ali S Turabi Soheil Saedi Sayed Mohammad SaghaianHaluk E Karaca and Mohammad H Elahinia
Index 279
List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

List of Contributors
Hashem Ashrafiuon PhDProfessor Department of Mechanical EngineeringDirector Center for Nonlinear Dynamics and ControlVillanova UniversityVillanova PA USA
Francesco Bucchi PhDResearch FellowDepartment of Civil and Industrial EngineeringUniversitagrave di PisaPisa Italy
Mohammad H Elahinia PhDProfessor Mechanical Industrial and ManufacturingEngineering DepartmentDirector Dynamic and Smart Systems LaboratoryThe University of ToledoToledo OH USA
Christoph Haberland Dr-IngSiemens AGPower and Gas DivisionBerlin Germany
Mahmoud Kadkhodaei PhDAssociate ProfessorDepartment of Mechanical EngineeringIsfahan University of TechnologyIsfahan Iran
Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Haluk E Karaca PhDAssociate ProfessorDepartment of Mechanical EngineeringUniversity of KentuckyLexington KY USA
Mohammad J MahtabiGraduate Research AssistantMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Reza Mirzaeifar PhDAssistant ProfessorMechanical Engineering DepartmentVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
Soheil SaediGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Sayed Mohammad SaghaianGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
Nima Shamsaei PhDAssistant ProfessorMechanical Engineering DepartmentMississippi State UniversityMississippi State MS USA
Masood Taheri AndaniGraduate Research AssistantDepartment of Mechanical EngineeringVirginia Polytechnic Institute and State UniversityBlacksburg VA USA
viii List of Contributors
Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Ali S TurabiGraduate Research AssistantMechanical Engineering DepartmentUniversity of KentuckyLexington KY USA
ixList of Contributors
Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Preface
Shape memory alloys (SMAs) have widespread uses in biomedical aero-space disaster mitigation and automotive applications Shape memoryeffect and superelasticity as the distinct thermomechanical behaviors of thesematerials have been harnessed primarily in nickelndashtitanium (NiTi) the mostcommonly used SMA The alloyrsquos ability to recover large deformation ina controllable manner has led to the development of minimally invasiveprocedures for treating various cardiovascular conditions This has resultedin achieving better outcomes for patients while also reducing the cost of theseprocedures Lighter and simpler automotive actuators made from NiTioffer better fuel economy and comfort Planes equipped with light and com-pact SMA actuators have achieved enhanced aerodynamics performance inflight testsThe purpose of this book is to provide a text for teaching both the funda-
mental and practical aspects of designing SMA actuators Each chapterfocuses on one of the aspects of these actuators including modeling devicedevelopment control fatigue fabrication and experimental evaluationComplementary information including experimental data and a series ofcomputer codes for modeling the behavior of SMAs is available for downloadat httpsmartsysengutoleodeduChapter 1 provides an introductorymaterials science background for SMAs
while providing several examples of their applications in various disciplinesThis chapter also introduces a rotary SMA actuator that is used in the rest ofthe book A model for this system is introduced to discuss the phase transfor-mation kinetics of these alloysChapter 2 provides an alternative framework for developing closed-form
semianalytical models for SMA actuators by reducing their three-dimensionalconstitutive equations There are a few issues such as convergence difficultiesand parametric sensitivity when phenomenological constitutive models are
numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

numerically implemented This approach which is applicable to variouslength scales addresses some of these problemsChapter 3 covers several actuation mechanisms and methodologies in the
context of 10 unique automotive and biomedical applications In thesedevices both shape memory and superelastic materials are used in the formof wires springs and three-dimensional shapes For each device the behaviorof the material is explained to develop the design procedureChapter 4 deals with control as an integral part of most SMA systems In
addition to designing control algorithms for these actuators the fundamentalissues that should be considered in the controller design are highlightedThe uniquemechanical behavior of the SMAs is the reason for their different
fatigue response as explained in Chapter 5 In addition to structural fatiguethese alloys are affected by functional fatigue the degradation of their shapememory and superelastic responseChapter 6 in addition to providing a comprehensive review of the well-
established fabricationmethods forNiTi highlights several alternativemethodssuch as additive manufacturing for producing functional SMA componentsThese approaches have the potential of simplifying the production of shapememory and superelastic devices and offer the possibility of applying themin different areas such as patient-specific medical solutions and treatmentsChapter 7 teaches the main experimental methods for characterizing the
behavior of SMAs while explaining the effect of various treatment steps onthe microstructure of the material which in turn produces their distinct ther-momechanical behaviorsI hope that this book and the accompanying materials will help students
learn about SMAs and facilitate the application of these materials towardinnovative solutions
MOHAMMAD H ELAHINIA
PROFESSOR OF MECHANICAL ENGINEERING
THE UNIVERSITY OF TOLEDO
TOLEDO OH USA
xii Preface
Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Acknowledgments
I would like to start by expressing my gratitude to my parents Abolfath andZahra They are themost generous individuals that I knowWhen Iwas grow-ing upmdashwhile we were not wealthymdashI did not know of any other kid whohad as many books as I had Throughout my life their belief in me has neverfaltered and I am deeply and endlessly grateful for their love My uncleGholamhossein has been my role model for as long as I can rememberI am grateful to him for being the force that pushed me in the right directionat critical moments in my life I cannot forget Dr Farshid Asl who has been agreat mentor motivator and friend for the past 25 yearsThis project has been more than 15 years in the making It all started when
Dr Hashem Ashrafiuon my graduate advisor at Villanova University intro-ducedme to control of shapememory alloy (SMA) actuators I am fortunate tohave him as the coauthor of Chapter 4 which discusses control of actuatorsbased on these alloys Mymentor and PhD advisor at Virginia Tech DrMehdiAhmadian has had the greatest effect on my professional life He has taughtme the importance of seeing every situation positively He was the one whosupported me while I studied the effect of dynamics on the behavior of SMAactuators Throughout my academic and research career I have been blessedto work with many talented students and collaborators Ehsan TarkeshEsfahani came to our lab with a wealth of knowledge in robotics His researchinitiated our labrsquos work in the area of assistive and rehabilitation devicesbased on the use of SMAs Majid Tabesh Ahmadreza Eshghinejad WalterAnderson and Masood Taheri Andani were the force behind our work inthe area of modeling and SMA application in medical devices Some of thesefour studentsrsquo work is the basis for Chapter 3 on design of SMA actuatorsFrancesco Bucchi was a visiting PhD student in our lab and contributed sig-nificantly to the same chapter Dr Christoph Haberland is an excellentmechanical engineer with a profound understanding of materials science
and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

and engineering He came to our lab as a postdoctoral fellow and led ourefforts in additive manufacturing of these alloys He is a coauthor ofChapter 1 the introductory chapter as well as Chapter 6 on manufacturingOur group has long benefited from the help and support of Dr MahmoudKadkhodaei and Dr Reza Mirzaeifar who are the two leading experts onunderstanding and modeling the behavior of SMAs They are the coauthorsof Chapters 1 and 2 Chapter 5 on fatigue would not have been possible with-out Dr Nima Shamsaei who has academic and industrial experience in thearea of fatigue and fracture Dr Haluk Karacarsquos experience and expertise inexperimental evaluation of SMAs has tremendously benefited our groupHe has been the lead coauthor of Chapter 7 which deals with the experimentalevaluation of these alloysI am thankful to the undergraduate graduate and visiting research assis-
tants in our groupWhile I cannot name them all I am especially impressed byand thankful to Ted Otieno who helped with this book while handling the fullload of being a successful honors studentLast but not least I am forever indebted tomywife Fatemeh and our daugh-
ters Hedyeh and Hoda for their love and support Theyrsquove tolerated mylengthy ramblings about SMAs over many family dinners without them thisand many other projects would not have been possible Hedyehrsquos artistictalent and attention to detail are well captured in the cover of this book
xiv Acknowledgments
1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

1IntroductionChristoph Haberland Mahmoud Kadkhodaeiand Mohammad H Elahinia
This chapter is on introductory materials on shape memory alloys (SMA)behavior Shape memory effect and superelasticity will be covered In thiscontext the benefits of SMAs in actuation will be highlighted Phase transfor-mation as the underlying phenomenon for the unique properties of thesealloys will be presented and discussed Different actuation mechanisms anddesigns will be presented and compared Example of aerospace automotiveindustrial and biomedical applications of SMA actuation will be used to dis-cuss the benefits and limitations of actuations using these alloys Particularattention will be on rotary SMA actuators This type of actuators will be usedas a continuous example throughout the book
11 Shape memory alloys
SMAs are distinguished from conventional metallic materials by their abilityto restore their shape after large deformations which can significantly exceedthe actual elastic deformability of the material This is referred to as
ShapeMemoryAlloyActuatorsDesign Fabrication andExperimental Evaluation FirstEditionMohammadHElahiniacopy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Shape memory effect (SME) characteristic and was first observed in 1932 in agoldndashcadmium1 alloy following a thermally induced change in the crystalstructure [1 2] Nearly 20 years later Chang and Read [3] identified the fun-damental mechanisms in the crystal lattice and attributed this phenomenonto a thermoelastic behavior of the martensitic phase In the following yearsthe SME was observed in other alloys more than 25 binary ternary or quat-ernary alloys and alloy systems are now known to show shape memoryproperties [4] In contrast to nickelndashtitanium (NiTi) majority of these systemshowever have only been considered in principle and as such have not yetachieved any practical technological importance [5] In NiTi the SMEwas observed for the first time by Buehler et al at the US Naval OrdnanceLaboratory (NOL White Oak Maryland) in the 1960s [6 7] Because of theplace of discovery besides NiTi or TiNi the term nitinol is also commonlyused for this alloy The application of SMAs spans a wide range of lengthscales and these alloys are now used in multiscale devices ranging fromnanoactuators used in nanoelectromechanical systems to very large devicesused in civil engineering applications SMA devices range from simpleparts like cell phone antennas or eyeglass frames to complicated devicesin mechanical [8ndash10] biomechanical [11ndash13] aerospace [14] and civil engi-neering [15]Today more than 90 of all commercial shape memory applications
are based on binary NiTi or ternary NiTi-Cu and NiTi-Nb alloys [5] This isdespite the relatively high world market prices for high-purity nickel andespecially for high-purity titanium It should be noted that the price ofFe- or Cu-based SMAs is lower Additionally as explained in Chapter 6themanufacturing processes of NiTi are complex and challenging which addsto the production costs The main reason for the dominance of NiTi-basedSMAs is due to their excellent structural and functional properties TheSME in NiTi allows for relatively large reversible deformations of up to 8characterized by good functional stability [5 16ndash18] In addition NiTi hasgood wear and corrosion resistance and biocompatible properties makingit an attractive candidate for various medical applications such as surgicaltools stents or orthodontic wires [19ndash22] Furthermore the low stiffness ofNiTi attracts interest for use in bone implant applications and in regenerativemedicine [23] For actuation and motion control applications this alloycan be easily heated by passing an electrical current while offering severaladvantages for system miniaturization such as high power-to-mass ratio
1 The mechanism of SME in AuCd is related to aging and is considered to be different from that ofNiTi which is due to detwinning
2 Shape Memory Alloy Actuators
maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

maintainability reliability and clean and silent actuation Due to its outstand-ing predominant role amongst other SMAs in this book we mainly focuson NiTiThe fundamental reason for the unique behavior of these alloys is due to the
martensitic phase transformation Originally this term referred to the crystal-lographic phase transformation which results in rapid cooling to a specificcrystallographic phase in the FendashC structure This is also the basic mechanismin the hardening of steels With increasing scientific understanding of theunderlying mechanisms the term martensitic phase transformation has beenextended to a variety of other alloys (eg FendashNi or CundashZn) and even othermaterial systems (eg some specific polymers or ceramics) In general themartensitic phase transformation is a specific type of a crystallographic phasetransformation in the solid state When cooling the material from the high-temperature phase (β-phase austenite) the material transforms into a low-temperature phase (α-phase martensite) This transformation is diffusionlessand therefore can occur at very low temperatures Since no diffusion processestake place the local concentration of the chemical composition is not affectedonly the crystal structure changes Usually this change in crystal structure isdriven by a shear process which can be described by a coordinated cooper-ative movement of atoms in the crystal lattice This results in the formation ofplate lenticular or acicular martensite crystalsIn polycrystalline materials the martensitic transformation is typically a
heterogeneous nucleation process that starts at favored nucleation sites suchas phase or grain boundaries precipitates or crystal defects It should beemphasized that alloys that demonstrate martensitic transformations donot necessarily have the shape memory properties This is due to the fact thatthemartensitic transformation induces highmechanical stresses The compen-sation of these stresses is usually associated with irreversible processes suchas dislocation slip In alloy systems which have shapememory properties themartensitic transformation is to a large extent reversible In these alloys thetransformation stresses are compensated by twinning processes and self-accommodation of favored martensite variants Due to the fact that no addi-tional lattice defects are created in these reversible processes this type ofmartensitic transformation is also called thermoelastic martensitic phasetransformation [24 25]Generally the SME can occur in three related phenomena Two of these are
the thermally induced one-way and two-way shape memory (pseudoplastic)effects The third effect is the pseudoelasticity which is also known assuperelasticity and mechanical memory Several factors define which ofthese effects takes place The most important factor is the alloy composition
3Introduction
Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

Others include the thermomechanical treatment the microstructure of thematerial and the ambient temperature [26 27] Generally the binary alloynickelndashtitanium is known to show all three effects depending on these factorsShape memory effect shown in Figure 11b as the ability of these alloys to
recover a certain amount of unrecovered strain uponheating takes placewhenthematerial is loaded such that the structure reaches the detwinnedmartensitephase and then unloaded while the temperature is below the austenite starttemperature (As) Heating the material at this stage to austenite will lead tostrain recovery and the material will regain its original shape The combinedstressndashstrain-temperature diagram as shown in Figure 11b can better explainthis phenomenon During SME as the result of cooling the twinned variantsdirectly transform from the austenitic phase (see Figure 11a transformation β
α+αminus) In loading the material transforms to detwinned martensite result-ing in large deformation before reaching the yield stress and therefore withoutdislocation beyond which dislocation plasticity starts (transformation α+αminus
α+) During the heating transformation to austenite and macroscopic initialshape recovery takes place (transformation α+ β) To complete the cycle bycooling the austenite transforms into self accommodating twinned martens-ite without an apparent shape change (transformation β α+αminus)Starting from point A as shown in Figure 11b the material is initially
in the austenite phase Cooling the alloy to a temperature below its martensite
Tem
pera
ture
T
Strain ε
Temperature T
AF
MS
AS
MF
Str
ess σ
Strain εεSME
B
B D
E
C
AF
F
C
(a) (b)
β
α+αndash
β
β
α+
α+
α+α+αndash
α+αndash
Deforming
Coolin
g Heating
σ fcr
σscr
Figure 11 Shape memory effect path in stressndashstrainndashtemperature space
4 Shape Memory Alloy Actuators
finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

finish temperature (Mf) will result in the twinned martensite crystalpoint B This forward transformation starts when the temperature reachesmartensite start (Ms) Loading the alloy at a constant temperature from pointB results in elastic deformation of the martensite phase At the critical stresslevels σcrs and σcrf the transformation to the detwinned martensite phase startsand finishes This part of the loading cycle induces a large strain withminimalincrease in the stress to point C As loading continues the detwinnedmartens-ite is elastically deformed beyond point C Further loading will induce plasticdeformation at the detwinned martensite phaseUnloading by removing the applied stress at a constant temperature from
point C results in a linear strain recovery to point D During this step themate-rial remains in the detwinned martensite phase At point D the remainingstrain is called the residual strain ϵSME This strain can be recovered by increas-ing the temperature By heating the alloy above the austenite start temperature(As) at point E the transformation from the detwinned martensite to theaustenite phase starts At point F when the alloy passes the austenite finishtemperature (Af) the material is fully austenite and recovery of the residualstrain completesIn contrast to the thermally activated effects in superelasticity no temper-
ature change is required Instead an external mechanical load is used toinduce phase transformation In this phenomenon the detwinned and favor-ably oriented martensite variants directly transform from the austenitic phase(see Figure 12 transformation β α+) To complete the cycle the material isunloaded before reaching the yield stress of the detwinnedmartensite beyondwhich dislocation plasticity starts During the unloading themartensite trans-forms back into austenite This results inmacroscopically recovering the initialshape Due to this behavior this phenomenon is sometimes called ldquorubberlikematerial behaviorrdquo but more common are the terms superelasticity and pseu-doelasticity It is worth noting that from the materials science point of viewthis behavior actually is not elasticDespite the fact that no thermal activation is required to observe pseu-
doelasticity it can only be activated in the temperature range Af lt T ltMd
where Af refers to the austenite finish temperature (where the transforma-tion into austenite is completed) and Md refers to the martensite deadtemperature (or martensite destruct temperature) above which no stress-induced martensite can be formed because the high-temperature phase(austenite) is stable As Figure 12b shows during loading and unloadingthe material shows a hysteresis because of different stress levels for theactual transformation It is also worth pointing out that this hysteresiscorresponds well to the mechanical behavior of human tissues under amechanical load
5Introduction
The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

The superelastic behavior takes place at temperatures above the austenitefinish temperature (Af) where the material is fully austenitic As shown inFigure 12b loading the material from point A initially induces elastic defor-mation of the austenite phase Further loading leads to stress-induced forma-tion of the detwinned martensite crystal and the macroscopically elastic-likedeformation of this structure to point B The transformation strain generatedduring this forward transformation from austenite to martensite isfully recovered in the reverse transformation This takes place during theunloading from point B which involves an initial elastic recovery of martens-ite followed by the transformation to austenite (recovering seemingly plasticϵPE) and finally the elastic recovery of austenite to point A At this point thestrain is completely recovered
12 Metallurgy of NiTi
For the nickelndashtitanium alloy the high-temperature phase austenite has abody-centered cubic structure (B2) This structure transforms during coolinginto the monoclinic lattice structure of the martensite (B19 ) whereby eachlattice atom retains its nearest neighbor atoms In binary NiTi alloys the ther-mally induced SME and the pseudoelasticity only occur in a narrow range of
Str
ess σ
Strain ε
Temperature T
T=const
MD
Str
ess σ
Strain ε
εPE
Unloa
ding
Def
orm
ing
(a) (b)
B
B
A
A
ββ
β
α+
α+
α+
σ fcr
σscr
Figure 12 Schematic of pseudoelasticity effect of load on crystallinestructure (a) stressndashstrainndashtemperature plot (b)
6 Shape Memory Alloy Actuators
the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

the chemical composition Only around the stoichiometric composition theintermetallic phase NiTi (B2) can exist in the absence of other phases underequilibrium conditions (see gray area of the binary phase diagram shownin Figure 13) In addition from the phase diagram in Figure 13 it is evidentthat the intermetallic phase NiTi has a limited solubility for titanium of lessthan 51 at This solubility limit is almost independent of the temperature[29] In these Ti-rich compositions and in almost equiatomic balances the NiTiphase is stable even at low temperatures The maximum nickel content of theNiTi phase cannot exceed 57 at Below 1118 C the solubility limit of nickelin the phase NiTi decreases with decreasing temperature At lower tempera-tures this overstoichiometric balance of the B2 phase does not exist in absenceof the other phases However by rapid quenching from this overstoichio-metric balance the Ni-rich composition of the B2 phase can be ldquofrozenrdquoand the material approaches a metastable state without secondary phasesHowever if this metastable state is subjected to heat treatment it will
approach a state of thermodynamic equilibrium by complex diffusion andprecipitation processes [30] Depending on the temperature and the agingtime a two-phase state of the phase NiTi and Ni-rich precipitations will beformed This results in a depletion of nickel in the B2 phase due to precipita-tion of Ni-rich phasesFigure 14a shows a section of the binary phase diagram in Figure 14b the
precipitation kinetics for Ni-rich NiTi (Ni52Ti48) are shown In the beginning
0
18001670degC
1310degC
1455degC
1118degC
TiN
i 3
NiTi
Ti 2
Ni
(Ni)
Liquid
984degC
1600
1400
Tem
pera
ture
T
degC
1200
1000
800
60010 20 30 40 50 60 70 80 90 100
TiNickel content CNi at-
Ni
(β-T
i)
(α-Ti)
Figure 13 Phase diagram of the system nickelndashtitanium The single-phaseNiTi (B2) is shaded important temperatures are highlighted Reproducedwith permission from Ref [28] ASM International
7Introduction
at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

at low temperatures and short aging metastable precipitates of type Ni4Ti3form With longer durations and higher temperatures metastable Ni3Ti2precipitates are formed Precipitation of stable Ni3Ti only occurs at very longaging treatments TheNi4Ti3 phase has a significant influence on themartensiticphase transformationWith the formationof theseprecipitates stress fields arisein the crystal structure which can lead to a multistage phase transformationIn this case during cooling from the B2 (austenite) phase the trigonal R-phaseis formed as a premartensitic state so that the transformation sequence becomesB2 R B19 [33 34] Ni4Ti3 precipitates also act as nucleation sites for themartensite and therefore its existence reduces the critical stress to start thetransformation Moreover the presence of the Ni4Ti3 particles hinders the dis-locationmovement and their precipitation hardening effect leads to an increasein yield stress As a result the irreversible processes which are usually associ-ated with deformation are reduced Additionally these effects contribute toan increase in the cyclic stability of the pseudoelastic effect This in turn leadsto a significant reduction in functional fatigue [35ndash37]In this metastable state the phase transformation temperatures of Ni-rich
NiTi strongly depend on the nickelndashtitanium ratio of the B2 matrix [33 3839] This relationship is shown in Figure 15 for both Ms the martensite starttemperature and T0 temperature of the thermodynamic equilibrium ofthe B2 phase and the B19 phase Binary NiTi SMAs with a substoichiometricnickel content where NiTi and Ti-rich phases (Ti2Ni ie Ti4Ni2OX) are in
Tem
pera
ture
T
degC
800
(a) (b)
600
400
45 50 55 01 1 10 100 1000
NiTi
NiTi+
Ti2Ni
NiTi +
Ni-rich phasesNi4Ti3
Ni3Ti2
Ni3Ti
Nickel content CNi at- Time t h
Figure 14 Section of the phase diagram of the system nickelndashtitanium (a)Isothermal transformation diagram of a Ni52Ti48 alloy (b) Reproduced withpermission from Refs [30ndash32] Elsevier
8 Shape Memory Alloy Actuators
the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

the thermodynamic equilibrium show no significant effect (see range 1 inFigure 15) On the other hand for nickel contents higher than 497 at bothtemperatures continuously decrease with increasing nickel content (see range2 in Figure 15) This dependence can be used to adjust the phase transforma-tion temperatures by the nickelndashtitanium ratio Alloys can thus be producedwhich show either a thermal or pseudoelastic memory effect in the ambienttemperature It should however be noted that during aging of Ni-rich NiTithe previously described precipitation processes again affect the nickelndashtitanium balance of the B2 matrix During the formation of Ni-rich phasesthe B2 phase is depleted of nickel which results in an increase of the transfor-mation temperatures [33 39]The effect of impurity related phases should also be considered During
high-temperature processing the pickup of impurities for example carbonandor oxygen can result in the formation of Ti-rich phases since theB2 phase has a low solubility for both elements [41] Carbon forms carbidesof type TiC [31 42ndash44] while oxygen is dissolved in the Ti2Ni phase andforms a stable phase of type Ti4Ni2OX [41 45 46] In addition to the degrada-tion of functional and structural properties due to the impurity pickup theformation of these Ti-rich phases also results in a shift of the nickelndashtitaniumbalance in favor of the nickel content In contrast to precipitation of Ni-richphases this causes a decrease in transformation temperatures These effects
Nominal nickel concentration CNi at-
485
80
120
40
0
ndash40
ndash80
490 495 500 505 510
Tem
pera
ture
T
degC
T0 (calculated)
Ms (experimental)
1
2
ndash83degC at-
Figure 15 Influence of nominal nickel concentration on martensite startand thermodynamic equilibrium temperature Reproduced with permissionfrom Ref [40] Elsevier
9Introduction
must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

must therefore be given high attention in manufacturing and processing ofNiTi alloys
13 Thermomechanical Behaviors
The crystalline structure of SMAs undergoes a solidndashsolid phase trans-formation when cooled from its stiff high-temperature austenite (A)phase to its softer low-temperature martensite (M) structure The stressndashtemperaturendashtransformation (phase) plot is a schematic representation ofthe transformation regions for SMAs Usually a stressndashtemperaturendashtransformation plot shows the temperature along the abscissa and stressalong the ordinate A widely accepted stressndashtemperaturendashtransformationplot of SMA materials is shown in Figure 16 [47] As described earlierSMAs as the result of the transformation between two phases can exhibitSME and pseudoelasticity The lines in the plot show the phase boundariesthat separate the two solid phases of an alloy The stressndashtemperaturendashcrystalline structure pattern during shape memory effect is depicted on the
σ
σ fcr
Mf Ms
CM
CA
TAs Af
σscr
Figure 16 Stressndashtemperaturendashtransformation (phase) plot of a shapememory material depicts the stable area for each crystalline structureCrystal transformation takes place as the result of variation in stress andtemperature (s refers to transformation start and f to transformation finishrespectively)
10 Shape Memory Alloy Actuators
transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

transformation diagram (Figure 17) to complement the thermomechanicaland crystallin structure changes shown in Figure 11 for more clarity Super-elasticity as the ability of SMAs to recover a large amount of strain throughmechanical loadingunloading is shown in Figure 12 The stressndashtempera-turendashcrystalline structure cycle of the superelastic behavior is shown on thetransformation plot in Figure 18As shown in Figures 16 17 and 18 the four transformation temperatures
that define the behavior of SMAs are stress dependent The two parameters
CA1CA
=dAs
dσ=dAf
dσandCM
1CM
=dMs
dσ=dMf
dσ
quantify the effect of stress on austenite and martensite transformation tem-peratures respectivelyThese temperatures are also affected by the thermomechanical history of
the alloys In single crystals and polycrystals of CuAlZnMn for examplethe reverse martensitic transformation is influenced by the history of theforward transformation [48] The transformation path from austenite to mar-tensite the deformation in martensite and the annealing of martensite understress affect the transformation temperatures The incomplete and complete
Detwinned martensite
Twinned martensite
D
C
σ
B
E F
A
σscr
σfcr
Austenite
T
Figure 17 Shape memory effect and the associated crystalline changespresented in a stressndashtemperaturendashcrystalline structure transformation diagram
11Introduction
transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

transformation cycling that is thermal cycling between the forward and thereverse transformation finish temperatures in NiTi leads to variations ofthe transformation temperatures Referred to as the ldquothermal arrest memoryeffectrdquo the alloy remembers the arrested temperature in incomplete heatingndashcooling cycles by changing its transformation temperature in the consequentheatingndashcooling cycles [49ndash51] When a reverse transformation is stopped(arrested) between As and Af followed by cooling belowMf or in other wordsa complete martensitic transformation after an interrupted heating cycle amemory of the arrest is induced in the alloy [52ndash55] In a consequent heatingthis memory of the arrested temperature affects the thermomechanical behav-ior of the alloy at an intermediate point where the transformation showsan apparent completion If after arresting between As and Af during reversetransformation the temperature is reduced below As but aboveMs the subse-quent reverse transformation in the next heating cycle does not start at AsInstead the transformation starts at the arrested temperature as shown inFigure 19 [56] Similarly for any interruption during the forward transforma-tion change in the martensite start temperature is observed if the specimen issubjected to heating to a temperature below Af followed by a cooling belowMs Moreover if the latter heating cycle continues to a temperature above Asthe reverse transformation does not start at As but at a greater temperature
Austenite
AC
B
Detwinned martensite
T
σ
Figure 18 Superelasticity and the associated crystalline changes presentedin a stressndashtemperaturendashcrystalline structure transformation diagram
12 Shape Memory Alloy Actuators
14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

14 Actuation
Recovering large strains as a result of heating is the actuation principle ofSMAs These alloys have a very high energy density therefore actuators thatimplement these alloys are compact and lightweight alternatives to othertypes of actuators such as DC motors and solenoids In other words SMAactuation is an effective way to reduce weight and tominimize the complexityof systems The benefits of these alloys over other smart materials such as pie-zoelectric materials electrostrictive materials and magnetostrictive materialsinclude the high force-to-weight ratio and large displacement capability Thedisadvantages are slow actuation cycle due to longer cooling time low energyefficiency due to conversion of heat to mechanical energy and challengingmotion control due to hysteresis nonlinearities parameter uncertaintiesand difficulties in measuring state variables such as temperatureLarge mechanical stress is produced when SMA elements are heated
beyond the austenite start temperature NiTi actuators for example can applyup to 600MPa stress As a result a 01 mm diameter NiTi wire can applya force of 188 N which is enough to lift 100 000 times its own weight SMAactuators therefore offer the potential of significantly reducing the weightof active structures
Temperature (degC)
New transformation start temperatureQ
(W
g)
Interruption in heating
As Af
First cycle (incomplete)
Second cycle (complete)
Figure 19 Shifts in As of NiTi after an incomplete cooling cycle Reproducedwith permission from Ref [56] Elsevier
13Introduction
An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators

An essential step in creating the shape memory actuation is shape settingAfter the material is produced and is exposed to cold work and annealingthe desired memorized shape of the actuator is instilled during shape settingFor this step the cold-worked material is constrained in a mandrel and heat-treated with a specific duration and a predetermined temperature which isfollowed by a rapid cooling The duration is in the order of about 10min andthe temperature is around 500 C This process is essential for both shapememory actuators as well as superelastic devices In addition to creatingthe desired shape this final heat treatment defines mechanical propertiesof the part A higher temperature results in a lower tensile strength Theshape setting for actuators can also be performed continuously as a partof the fabrication process for wires and tubes which usually result in straightmemorized forms In most cases however the required heat treatment for anactuator with a more complex memorized form is a separate procedure Heattreatments and shape setting are described in detail in chapter 6One-way SME refers to the ability of an SMA that is deformed at a low tem-
perature to recover the deformation when heated to a higher temperature Tocreate a repeatable actuation an external bias force is used This force alwaysopposes the SMA actuator and during cooling resets the actuator for the nextcycle In the less common two-way SMA actuators the SMA elements canexhibit repeatable shape changes without a bias mechanical load Insteadthe SMA alternates between memorized shapes when subjected to a cyclicthermal load In this case the SMA memorizes a martensite shape that is dif-ferent from the austenite shape This behavior is called the two-way SME Inthis mode when the SMA is cooled from austenite to martensite instead ofadapting to a self-accommodated structure some variants of the martensiteare favored and the martensite adopts a shape different from that of theself-accommodated structure This memory is usually the result of trainingin the form of cyclic thermomechanical loadings or aging for precipitationunder stress andor under constraint In addition to traditional heat treatmentmethods laser scanning has been used for creating the two-way memoryeffect [57] It is important to note that two-way SME provide very limitedstrains and therefore it cannot be used in most applicationsMultiple SME is a well-known phenomenon in shape memory polymers
(SMPs) in which a deformed SMP can recover from a temporary shape backto the original shape through a number of intermediate shapes in a step-by-step manner While this behavior is ordinarily not observed in SMAs it is pos-sible to induce multiple SME in these alloys [58] To this end a laser beam isused to locally heat-treat NiTi This treatment causes precipitation and localevaporation of nickel which results in different local Af which is higher thanthat of the base material By adjusting the duration and number of pulses of
14 Shape Memory Alloy Actuators