
Theory of Linear Ordinary Differential Equations · Theory of Linear Ordinary Differential...
136
logo1 Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem Theory of Linear Ordinary Differential Equations Bernd Schr ¨ oder Bernd Schr¨ oder Louisiana Tech University, College of Engineering and Science Theory of Linear Ordinary Differential Equations
Transcript of Theory of Linear Ordinary Differential Equations · Theory of Linear Ordinary Differential...
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Theory of Linear Ordinary DifferentialEquations
Bernd Schroder
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DefinitionA linear n-th order differential equation is of the form
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x),
with an not being the constant function 0.
I It is called homogeneous if and only if g = 0.I It is called inhomogeneous if and only if g 6= 0.I If, in an inhomogeneous equation, we replace the right side
g with 0, we obtain the corresponding homogeneousequation.
Note that the coefficients are functions. The results in thispresentation apply to constant coefficient equations as well asCauchy-Euler equations or the equations that are being solvedwith series solutions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DefinitionA linear n-th order differential equation is of the form
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x),
with an not being the constant function 0.I It is called homogeneous if and only if g = 0.
I It is called inhomogeneous if and only if g 6= 0.I If, in an inhomogeneous equation, we replace the right side
g with 0, we obtain the corresponding homogeneousequation.
Note that the coefficients are functions. The results in thispresentation apply to constant coefficient equations as well asCauchy-Euler equations or the equations that are being solvedwith series solutions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DefinitionA linear n-th order differential equation is of the form
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x),
with an not being the constant function 0.I It is called homogeneous if and only if g = 0.I It is called inhomogeneous if and only if g 6= 0.
I If, in an inhomogeneous equation, we replace the right sideg with 0, we obtain the corresponding homogeneousequation.
Note that the coefficients are functions. The results in thispresentation apply to constant coefficient equations as well asCauchy-Euler equations or the equations that are being solvedwith series solutions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DefinitionA linear n-th order differential equation is of the form
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x),
with an not being the constant function 0.I It is called homogeneous if and only if g = 0.I It is called inhomogeneous if and only if g 6= 0.I If, in an inhomogeneous equation, we replace the right side
g with 0, we obtain the corresponding homogeneousequation.
Note that the coefficients are functions. The results in thispresentation apply to constant coefficient equations as well asCauchy-Euler equations or the equations that are being solvedwith series solutions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DefinitionA linear n-th order differential equation is of the form
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x),
with an not being the constant function 0.I It is called homogeneous if and only if g = 0.I It is called inhomogeneous if and only if g 6= 0.I If, in an inhomogeneous equation, we replace the right side
g with 0, we obtain the corresponding homogeneousequation.
Note that the coefficients are functions. The results in thispresentation apply to constant coefficient equations as well asCauchy-Euler equations or the equations that are being solvedwith series solutions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Existence and Uniqueness
Every initial value problem of the form
an(x)y(n)(x)+ · · ·+a1(x)y′(x)+a0(x)y(x) = g(x),y(x0) = y0,
y′(x0) = y1,...
y(n−1)(x0) = yn−1,
where an is not the constant function 0 and all ai(x) and g(x)have continuous first derivatives, has a unique solution.So, in some ways, the solutions look like n-dimensional space.We are interested in using this analogy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Existence and UniquenessEvery initial value problem of the form
an(x)y(n)(x)+ · · ·+a1(x)y′(x)+a0(x)y(x) = g(x),y(x0) = y0,
y′(x0) = y1,...
y(n−1)(x0) = yn−1,
where an is not the constant function 0 and all ai(x) and g(x)have continuous first derivatives, has a unique solution.
So, in some ways, the solutions look like n-dimensional space.We are interested in using this analogy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Existence and UniquenessEvery initial value problem of the form
an(x)y(n)(x)+ · · ·+a1(x)y′(x)+a0(x)y(x) = g(x),y(x0) = y0,
y′(x0) = y1,...
y(n−1)(x0) = yn−1,
where an is not the constant function 0 and all ai(x) and g(x)have continuous first derivatives, has a unique solution.So, in some ways, the solutions look like n-dimensional space.We are interested in using this analogy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Existence and Uniqueness Theorem
, p.510
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Existence and Uniqueness Theorem
, p.510Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Furthering the Analogy Between Vectors andSolutions
Superposition Principle. Let y1 and y2 be solutions of thehomogeneous linear differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= 0,
and let c1 and c2 be real numbers. Theny(x) := c1y1(x)+ c2y2(x) is a solution, too.
So solutions of homogeneous equations have the same algebraicproperties as vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Furthering the Analogy Between Vectors andSolutions
Superposition Principle. Let y1 and y2 be solutions of thehomogeneous linear differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= 0,
and let c1 and c2 be real numbers. Theny(x) := c1y1(x)+ c2y2(x) is a solution, too.
So solutions of homogeneous equations have the same algebraicproperties as vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Furthering the Analogy Between Vectors andSolutions
Superposition Principle. Let y1 and y2 be solutions of thehomogeneous linear differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= 0,
and let c1 and c2 be real numbers. Theny(x) := c1y1(x)+ c2y2(x) is a solution, too.
So solutions of homogeneous equations have the same algebraicproperties as vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
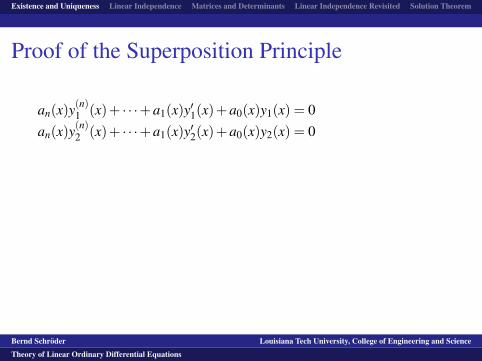
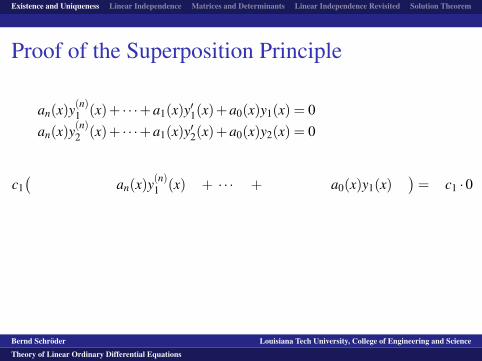
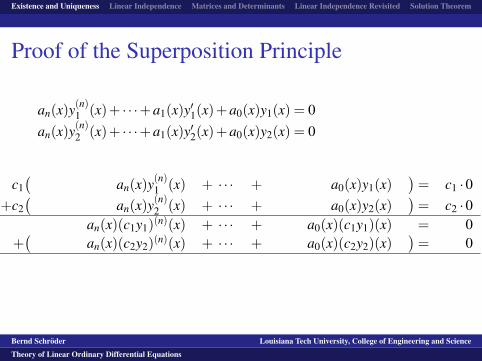
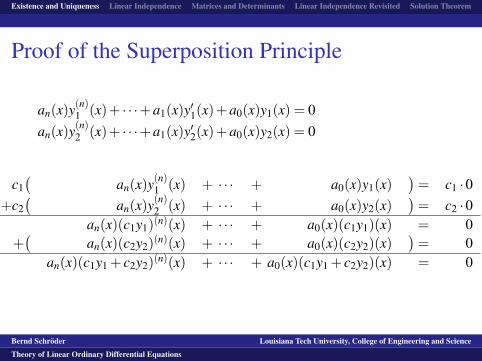
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
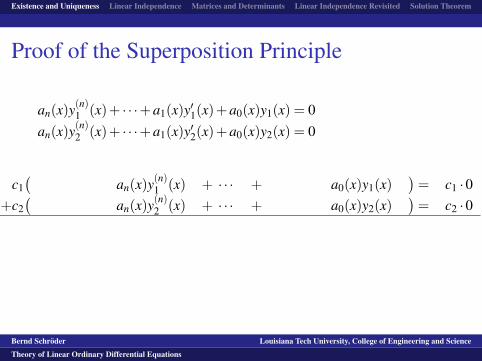
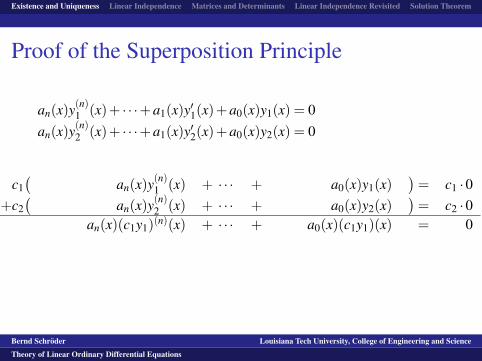
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0
+(
an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x))
= 0an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof of the Superposition Principle
an(x)y(n)1 (x)+ · · ·+a1(x)y′1(x)+a0(x)y1(x) = 0
an(x)y(n)2 (x)+ · · ·+a1(x)y′2(x)+a0(x)y2(x) = 0
c1(
an(x)y(n)1 (x) + · · · + a0(x)y1(x)
)= c1 ·0
+c2(
an(x)y(n)2 (x) + · · · + a0(x)y2(x)
)= c2 ·0
an(x)(c1y1)(n)(x) + · · · + a0(x)(c1y1)(x) = 0+
(an(x)(c2y2)(n)(x) + · · · + a0(x)(c2y2)(x)
)= 0
an(x)(c1y1 + c2y2)(n)(x) + · · · + a0(x)(c1y1 + c2y2)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
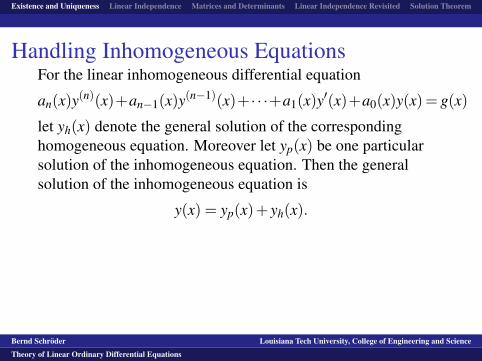
Handling Inhomogeneous Equations
For the linear inhomogeneous differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x)
let yh(x) denote the general solution of the correspondinghomogeneous equation. Moreover let yp(x) be one particularsolution of the inhomogeneous equation. Then the generalsolution of the inhomogeneous equation is
y(x) = yp(x)+ yh(x).
So the theory of inhomogeneous equations is pretty muchreduced to that of homogeneous equations.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Handling Inhomogeneous EquationsFor the linear inhomogeneous differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x)
let yh(x) denote the general solution of the correspondinghomogeneous equation. Moreover let yp(x) be one particularsolution of the inhomogeneous equation. Then the generalsolution of the inhomogeneous equation is
y(x) = yp(x)+ yh(x).
So the theory of inhomogeneous equations is pretty muchreduced to that of homogeneous equations.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Handling Inhomogeneous EquationsFor the linear inhomogeneous differential equation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= g(x)
let yh(x) denote the general solution of the correspondinghomogeneous equation. Moreover let yp(x) be one particularsolution of the inhomogeneous equation. Then the generalsolution of the inhomogeneous equation is
y(x) = yp(x)+ yh(x).
So the theory of inhomogeneous equations is pretty muchreduced to that of homogeneous equations.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
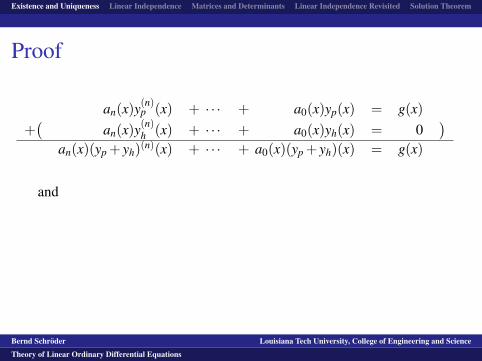
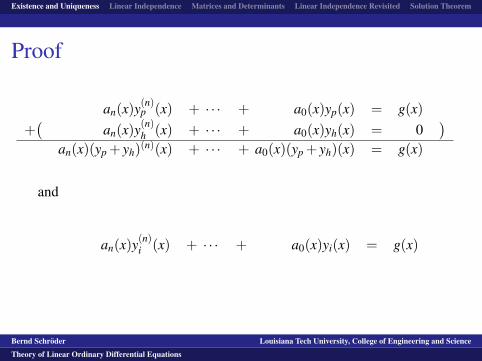
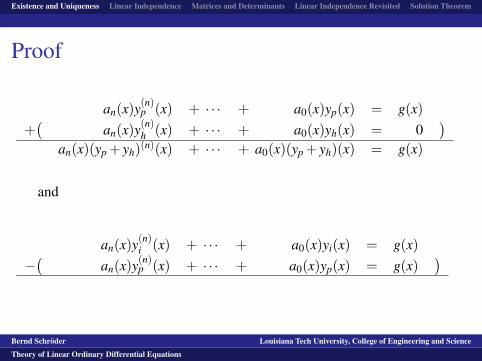
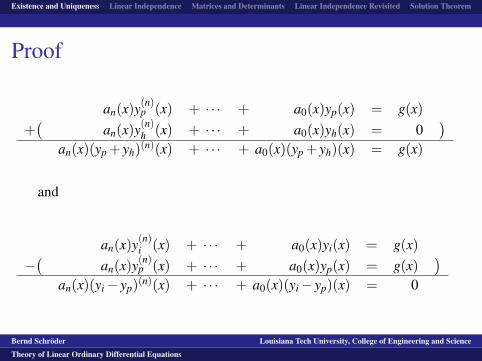
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)
an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)
an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Proof
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
+(
an(x)y(n)h (x) + · · · + a0(x)yh(x) = 0
)an(x)(yp + yh)(n)(x) + · · · + a0(x)(yp + yh)(x) = g(x)
and
an(x)y(n)i (x) + · · · + a0(x)yi(x) = g(x)
−(
an(x)y(n)p (x) + · · · + a0(x)yp(x) = g(x)
)an(x)(yi − yp)(n)(x) + · · · + a0(x)(yi − yp)(x) = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of Vectors
How do we actually know that several vectors “point indifferent directions”?
Let~v1,~v2, . . . ,~vn be vectors. Then any sumn
∑i=1
ci~vi = c1~v1 + c2~v2 + · · ·+ cn~vn
with the ci being real numbers is called a linear combinationof the vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of VectorsHow do we actually know that several vectors “point indifferent directions”?
Let~v1,~v2, . . . ,~vn be vectors. Then any sumn
∑i=1
ci~vi = c1~v1 + c2~v2 + · · ·+ cn~vn
with the ci being real numbers is called a linear combinationof the vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of VectorsHow do we actually know that several vectors “point indifferent directions”?
Let~v1,~v2, . . . ,~vn be vectors. Then any sumn
∑i=1
ci~vi = c1~v1 + c2~v2 + · · ·+ cn~vn
with the ci being real numbers is called a linear combinationof the vectors.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for Vectors
A set of n vectors {~v1, · · · ,~vn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1~v1 + · · ·+ cn~vn =~0, where~0 denotes the nullvector, for which all components are zero.If no such numbers exist, the set of vectors is called linearlyindependent. That is, a set of n vectors {~v1, · · · ,~vn} is calledlinearly independent if and only if the only numbers c1, · · · ,cn,
for whichn
∑i=1
ci~vi =~0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for VectorsA set of n vectors {~v1, · · · ,~vn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1~v1 + · · ·+ cn~vn =~0, where~0 denotes the nullvector, for which all components are zero.
If no such numbers exist, the set of vectors is called linearlyindependent. That is, a set of n vectors {~v1, · · · ,~vn} is calledlinearly independent if and only if the only numbers c1, · · · ,cn,
for whichn
∑i=1
ci~vi =~0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for VectorsA set of n vectors {~v1, · · · ,~vn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1~v1 + · · ·+ cn~vn =~0, where~0 denotes the nullvector, for which all components are zero.If no such numbers exist, the set of vectors is called linearlyindependent. That is, a set of n vectors {~v1, · · · ,~vn} is calledlinearly independent if and only if the only numbers c1, · · · ,cn,
for whichn
∑i=1
ci~vi =~0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
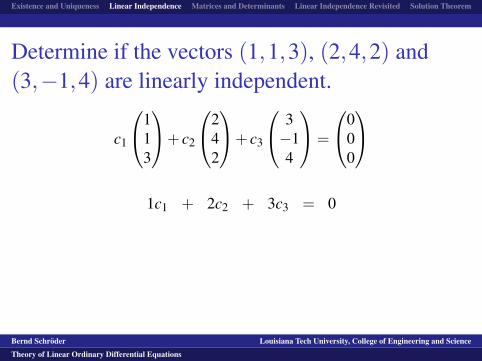
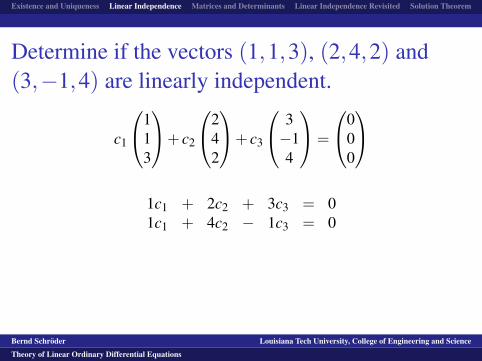
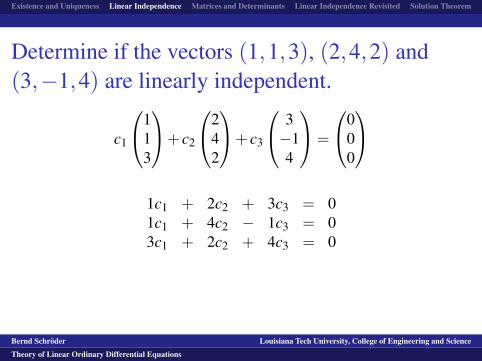
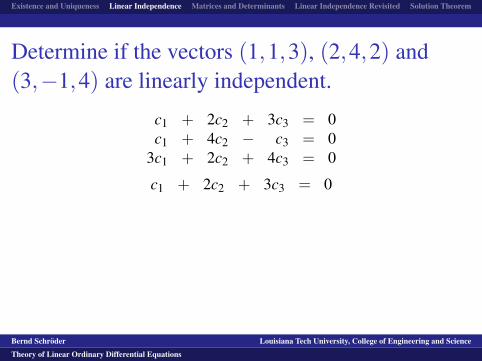
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1
113
+ c2
242
+ c3
3−14
=
000
1c1 + 2c2 + 3c3 = 01c1 + 4c2 − 1c3 = 03c1 + 2c2 + 4c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1
113
+ c2
242
+ c3
3−14
=
000
1c1 + 2c2 + 3c3 = 01c1 + 4c2 − 1c3 = 03c1 + 2c2 + 4c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1
113
+ c2
242
+ c3
3−14
=
000
1c1 + 2c2 + 3c3 = 0
1c1 + 4c2 − 1c3 = 03c1 + 2c2 + 4c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1
113
+ c2
242
+ c3
3−14
=
000
1c1 + 2c2 + 3c3 = 01c1 + 4c2 − 1c3 = 0
3c1 + 2c2 + 4c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1
113
+ c2
242
+ c3
3−14
=
000
1c1 + 2c2 + 3c3 = 01c1 + 4c2 − 1c3 = 03c1 + 2c2 + 4c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
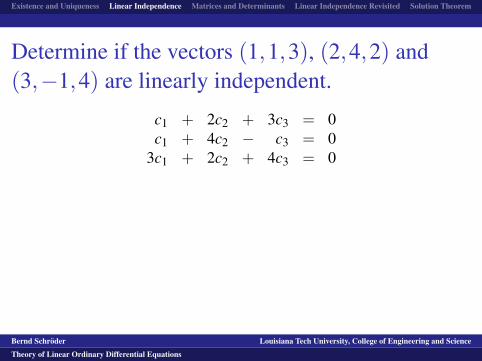
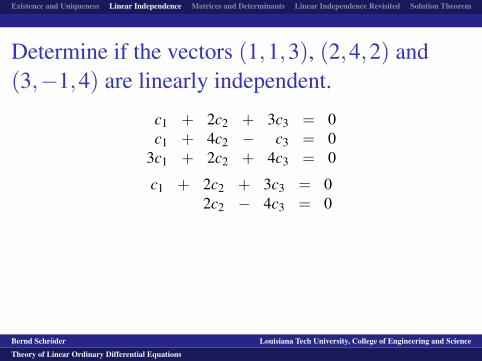
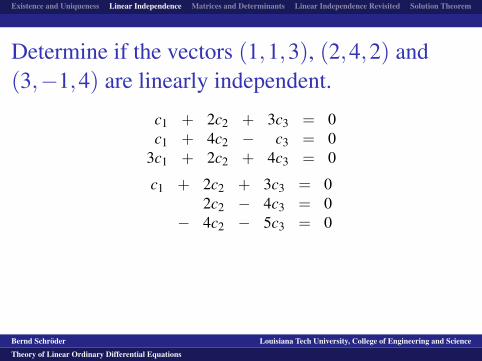
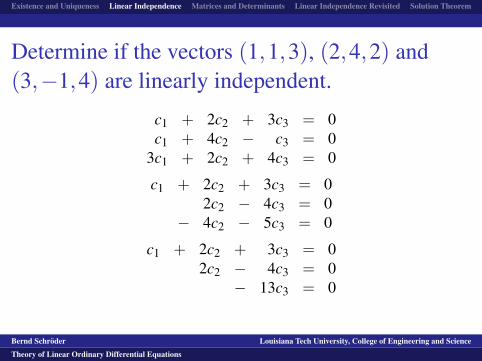
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
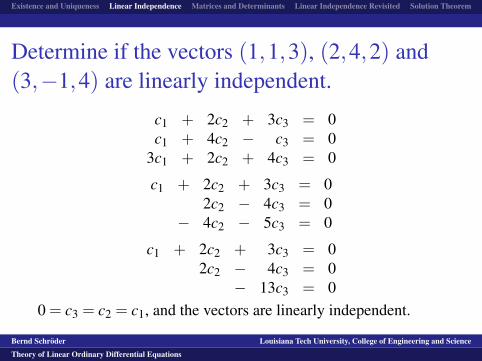
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
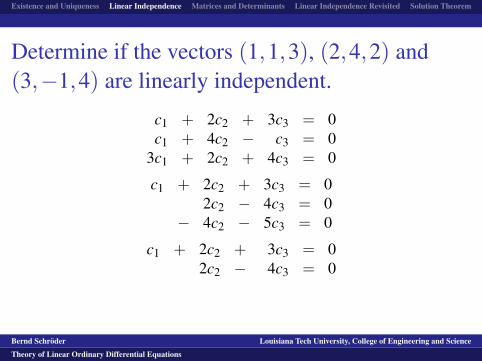
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 0
2c2 − 4c3 = 0− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
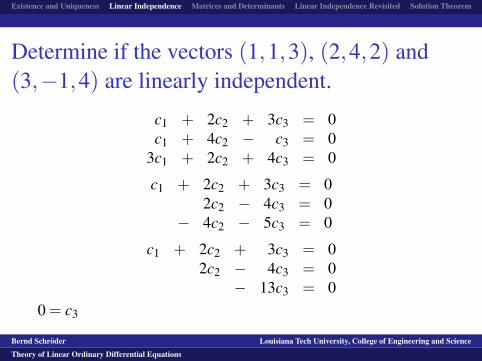
− 13c3 = 0
0 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3
= c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
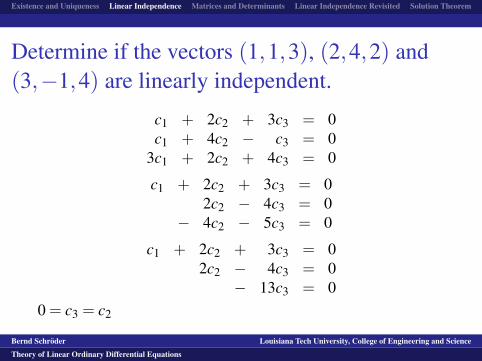
− 13c3 = 00 = c3 = c2
= c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
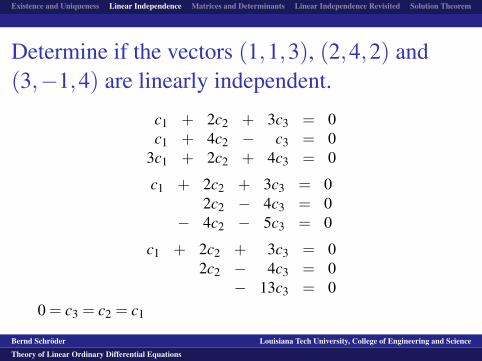
− 13c3 = 00 = c3 = c2 = c1
, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if the vectors (1,1,3), (2,4,2) and(3,−1,4) are linearly independent.
c1 + 2c2 + 3c3 = 0c1 + 4c2 − c3 = 0
3c1 + 2c2 + 4c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 4c2 − 5c3 = 0
c1 + 2c2 + 3c3 = 02c2 − 4c3 = 0
− 13c3 = 00 = c3 = c2 = c1, and the vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
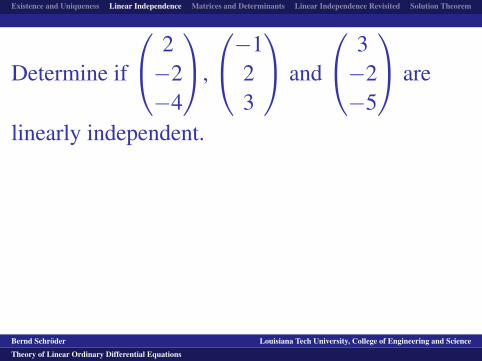
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
2c1 − 1c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
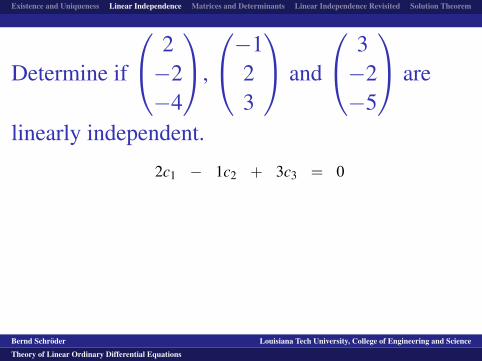
linearly independent.
2c1 − 1c2 + 3c3 = 0
−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
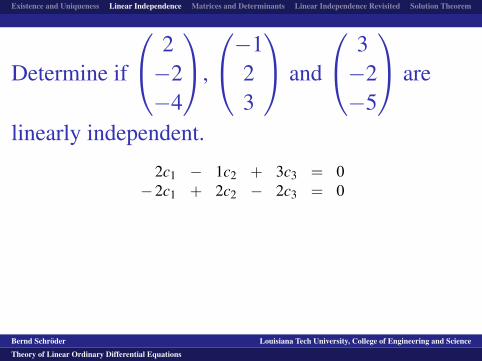
linearly independent.
2c1 − 1c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0
−4c1 + 3c2 − 5c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
2c1 − 1c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
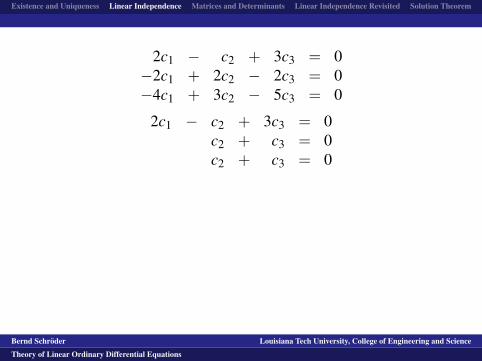
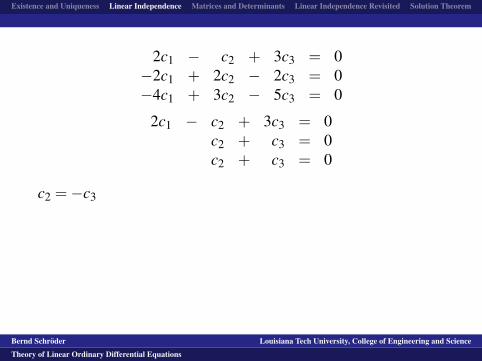
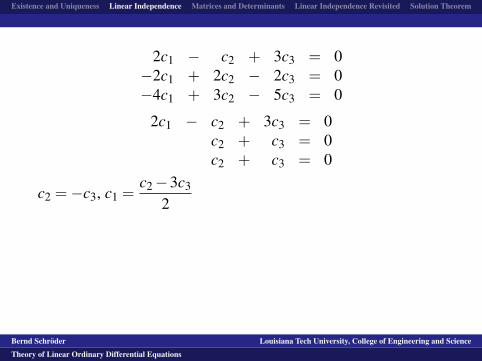
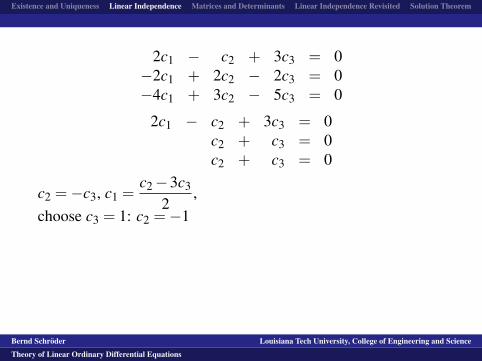
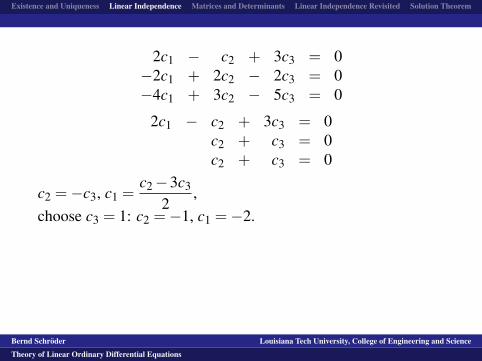
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
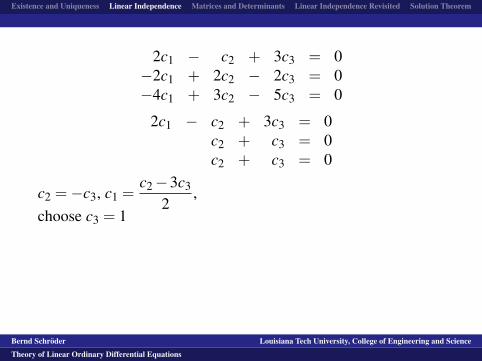
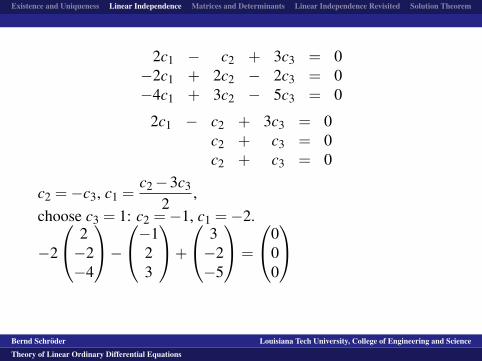
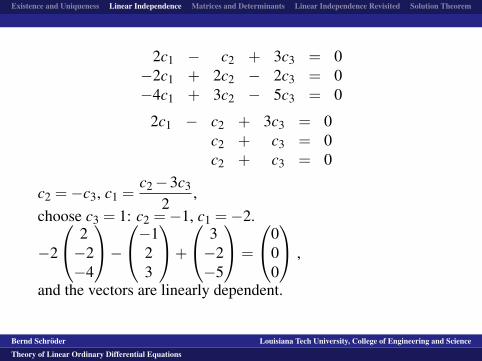
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0
c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0
c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3
, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2
,choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1
: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1
, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
2c1 − c2 + 3c3 = 0−2c1 + 2c2 − 2c3 = 0−4c1 + 3c2 − 5c3 = 0
2c1 − c2 + 3c3 = 0c2 + c3 = 0c2 + c3 = 0
c2 = −c3, c1 =c2 −3c3
2,
choose c3 = 1: c2 = −1, c1 = −2.
−2
2−2−4
−
−123
+
3−2−5
=
000
,
and the vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Why use Matrices?
113
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Why use Matrices?
113
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Why use Matrices?
113
242
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Why use Matrices?
113
2 34 −12 4
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Why use Matrices?
113
2 34 −12 4
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Matrices
Let m and n be positive integers. An m×n-matrix is arectangular array of mn numbers aij, commonly indexed andwritten as follows.
A=(ai,j) i = 1, . . . ,mj = 1, . . . ,n
=
a11 a12 · · · a1(n−1) a1na21 a22 · · · a2(n−1) a2na31 a32 · · · a3(n−1) a3n
......
a(m−1)1 a(m−1)2 · · · a(m−1)(n−1) a(m−1)nam1 am2 · · · am(n−1) amn
.
The index i is called the row index and the index j is called thecolumn index.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
MatricesLet m and n be positive integers. An m×n-matrix is arectangular array of mn numbers aij, commonly indexed andwritten as follows.
A=(ai,j) i = 1, . . . ,mj = 1, . . . ,n
=
a11 a12 · · · a1(n−1) a1na21 a22 · · · a2(n−1) a2na31 a32 · · · a3(n−1) a3n
......
a(m−1)1 a(m−1)2 · · · a(m−1)(n−1) a(m−1)nam1 am2 · · · am(n−1) amn
.
The index i is called the row index and the index j is called thecolumn index.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determinants
Let A =(
a11 a12a21 a22
)be a 2×2 matrix. Then we define the
determinant of A to be
det(A) := det(
a11 a12a21 a22
):=
∣∣∣∣(a11 a12a21 a22
)∣∣∣∣ := a11a22 −a12a21.
Let A = (aij)i,j=1,...,n be a square matrix and let Aij be the matrixobtained by erasing the ith row and the jth column. Then thedeterminant of A is defined recursively by
det(A) := |A| :=n
∑j=1
(−1)i+jaij det(Aij) =n
∑i=1
(−1)i+jaij det(Aij) ,
where the i in the first sum is an arbitrary row and the j in thesecond sum is an arbitrary column.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DeterminantsLet A =
(a11 a12a21 a22
)be a 2×2 matrix. Then we define the
determinant of A to be
det(A) := det(
a11 a12a21 a22
):=
∣∣∣∣(a11 a12a21 a22
)∣∣∣∣ := a11a22 −a12a21.
Let A = (aij)i,j=1,...,n be a square matrix and let Aij be the matrixobtained by erasing the ith row and the jth column. Then thedeterminant of A is defined recursively by
det(A) := |A| :=n
∑j=1
(−1)i+jaij det(Aij) =n
∑i=1
(−1)i+jaij det(Aij) ,
where the i in the first sum is an arbitrary row and the j in thesecond sum is an arbitrary column.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
DeterminantsLet A =
(a11 a12a21 a22
)be a 2×2 matrix. Then we define the
determinant of A to be
det(A) := det(
a11 a12a21 a22
):=
∣∣∣∣(a11 a12a21 a22
)∣∣∣∣ := a11a22 −a12a21.
Let A = (aij)i,j=1,...,n be a square matrix and let Aij be the matrixobtained by erasing the ith row and the jth column. Then thedeterminant of A is defined recursively by
det(A) := |A| :=n
∑j=1
(−1)i+jaij det(Aij) =n
∑i=1
(−1)i+jaij det(Aij) ,
where the i in the first sum is an arbitrary row and the j in thesecond sum is an arbitrary column.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Uses of the Determinant
1. The determinant gives the n-dimensional volume of theparallelepiped spanned by the column vectors.
2. The n-dimensional vectors~v1, . . . ,~vn are linearlyindependent if and only if det(~v1, . . . ,~vn) 6= 0, where(~v1, . . . ,~vn) denotes a matrix whose columns are thevectors~vi.
3. Computation of characteristic polynomials.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Uses of the Determinant1. The determinant gives the n-dimensional volume of the
parallelepiped spanned by the column vectors.
2. The n-dimensional vectors~v1, . . . ,~vn are linearlyindependent if and only if det(~v1, . . . ,~vn) 6= 0, where(~v1, . . . ,~vn) denotes a matrix whose columns are thevectors~vi.
3. Computation of characteristic polynomials.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Uses of the Determinant1. The determinant gives the n-dimensional volume of the
parallelepiped spanned by the column vectors.2. The n-dimensional vectors~v1, . . . ,~vn are linearly
independent if and only if det(~v1, . . . ,~vn) 6= 0, where(~v1, . . . ,~vn) denotes a matrix whose columns are thevectors~vi.
3. Computation of characteristic polynomials.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Uses of the Determinant1. The determinant gives the n-dimensional volume of the
parallelepiped spanned by the column vectors.2. The n-dimensional vectors~v1, . . . ,~vn are linearly
independent if and only if det(~v1, . . . ,~vn) 6= 0, where(~v1, . . . ,~vn) denotes a matrix whose columns are thevectors~vi.
3. Computation of characteristic polynomials.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
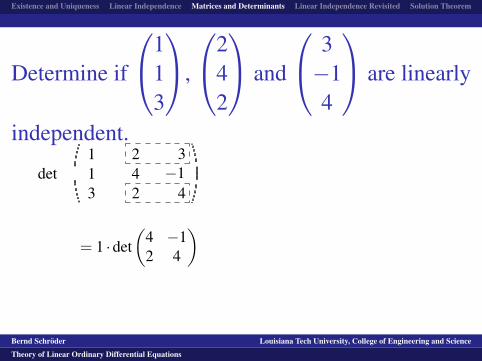
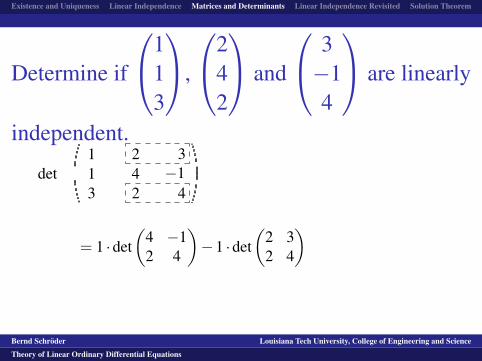
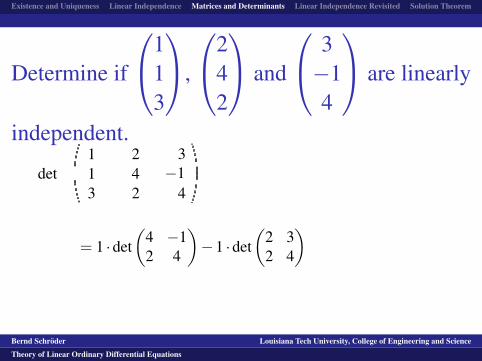
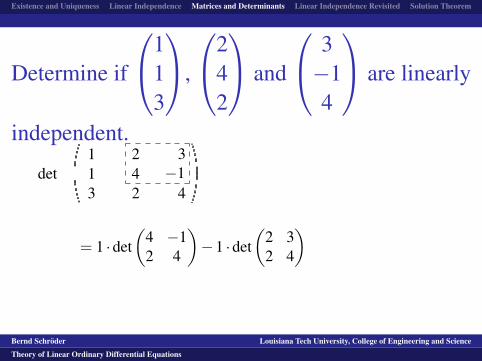
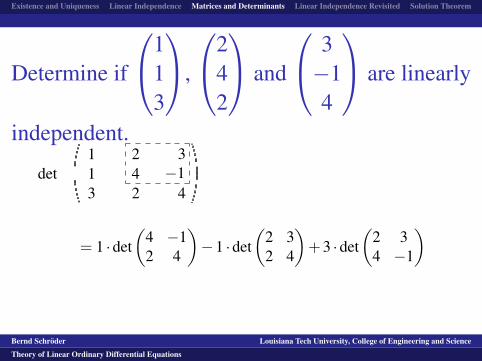
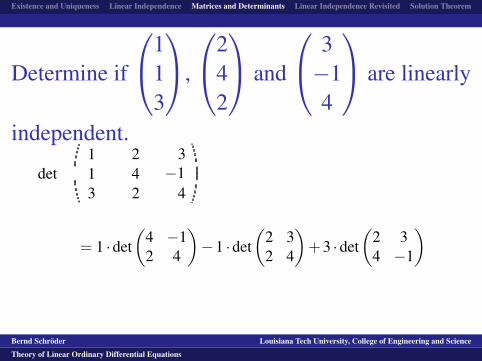
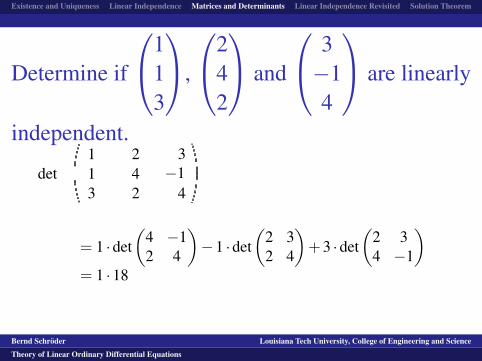
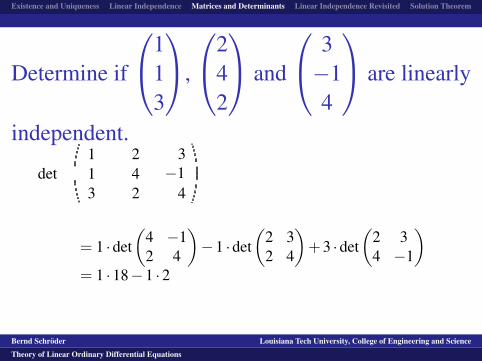
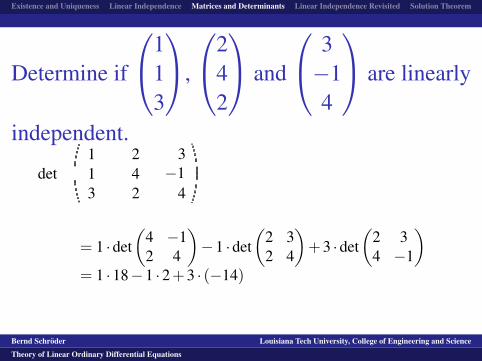
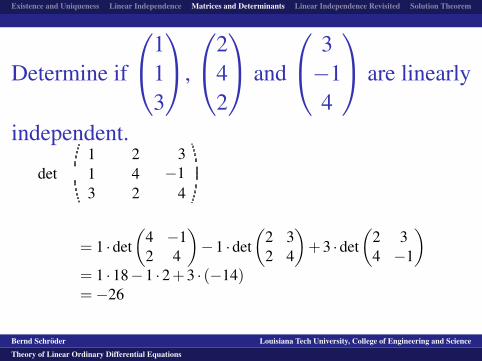
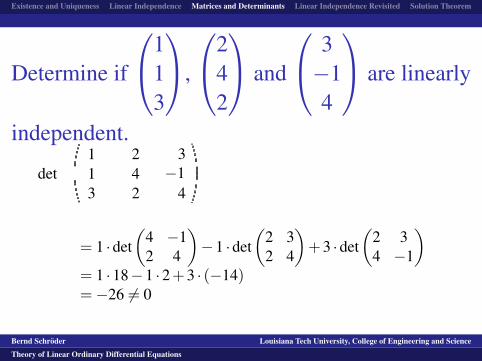
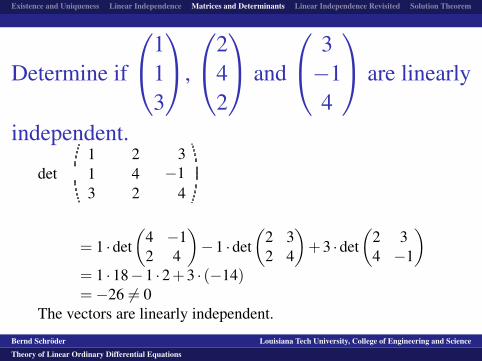
Determine if
113
,
242
and
3−14
are linearly
independent.
113
2 34 −12 4
det
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)
= 1 ·18−1 ·2+3 · (−14)= −26 6= 0
The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18
−1 ·2+3 · (−14)= −26 6= 0
The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18−1 ·2
+3 · (−14)= −26 6= 0
The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18−1 ·2+3 · (−14)
= −26 6= 0The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18−1 ·2+3 · (−14)= −26
6= 0The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18−1 ·2+3 · (−14)= −26 6= 0
The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
113
,
242
and
3−14
are linearly
independent.113
2 34 −12 4
det
= 1 ·det(
4 −12 4
)−1 ·det
(2 32 4
)+3 ·det
(2 34 −1
)= 1 ·18−1 ·2+3 · (−14)= −26 6= 0
The vectors are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
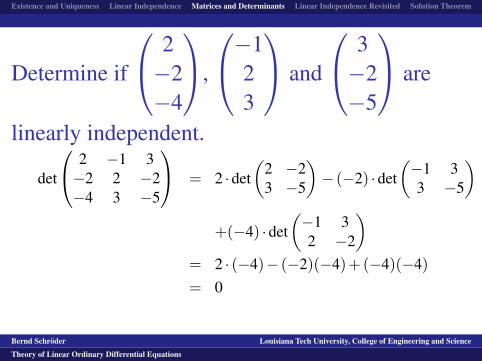
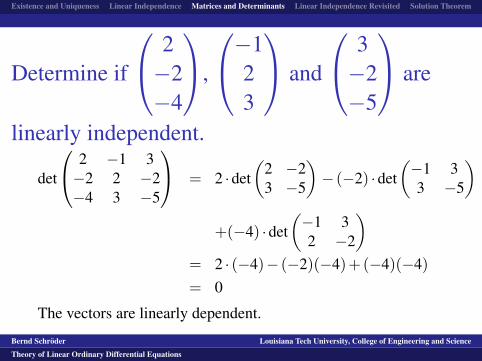
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
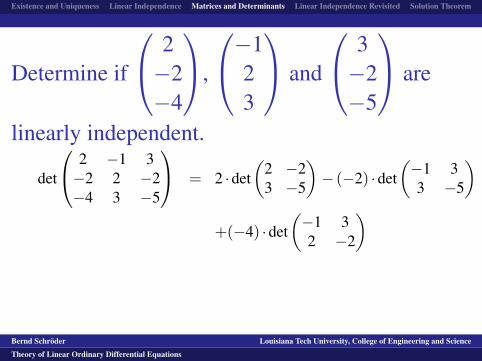
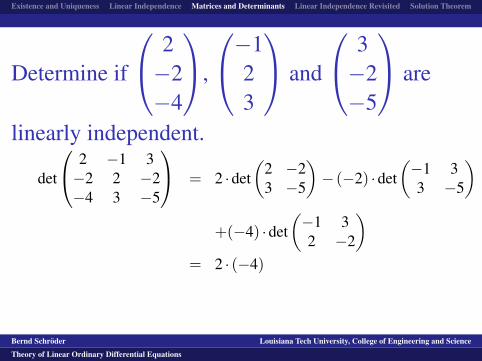
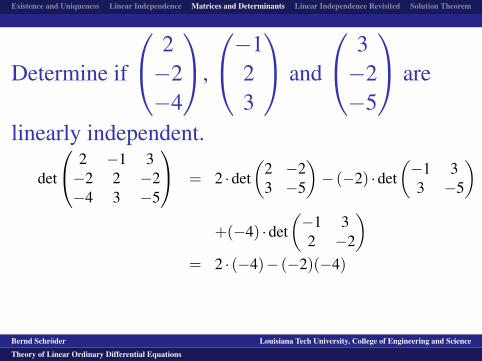
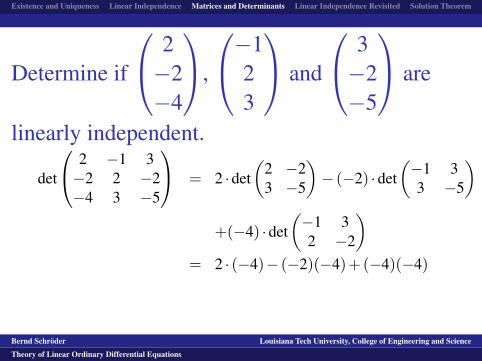
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)
− (−2) ·det(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)
= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)
− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)
+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)
= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if
2−2−4
,
−123
and
3−2−5
are
linearly independent.
det
2 −1 3−2 2 −2−4 3 −5
= 2 ·det(
2 −23 −5
)− (−2) ·det
(−1 33 −5
)
+(−4) ·det(−1 32 −2
)= 2 · (−4)− (−2)(−4)+(−4)(−4)= 0
The vectors are linearly dependent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of Functions
We need to determine what it means that several functions“point in different directions”.Otherwise we would not be able to recognize that a family likeyc1,c2(x) = c1 sin2(x)+ c2
(1− cos(2x)
)is not the general
solution of sin(x)y′′− cos(x)y′ +2sin(x)y = 0.(The family has only one constant, because2sin2(x) = 1− cos(2x).)
Let f1, f2, . . . , fn be functions. Then any sumn
∑i=1
cifi = c1f1 + c2f2 + · · ·+ cnfn
with the ci being real numbers is called a linear combinationof the functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of FunctionsWe need to determine what it means that several functions“point in different directions”.
Otherwise we would not be able to recognize that a family likeyc1,c2(x) = c1 sin2(x)+ c2
(1− cos(2x)
)is not the general
solution of sin(x)y′′− cos(x)y′ +2sin(x)y = 0.(The family has only one constant, because2sin2(x) = 1− cos(2x).)
Let f1, f2, . . . , fn be functions. Then any sumn
∑i=1
cifi = c1f1 + c2f2 + · · ·+ cnfn
with the ci being real numbers is called a linear combinationof the functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of FunctionsWe need to determine what it means that several functions“point in different directions”.Otherwise we would not be able to recognize that a family likeyc1,c2(x) = c1 sin2(x)+ c2
(1− cos(2x)
)is not the general
solution of sin(x)y′′− cos(x)y′ +2sin(x)y = 0.
(The family has only one constant, because2sin2(x) = 1− cos(2x).)
Let f1, f2, . . . , fn be functions. Then any sumn
∑i=1
cifi = c1f1 + c2f2 + · · ·+ cnfn
with the ci being real numbers is called a linear combinationof the functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of FunctionsWe need to determine what it means that several functions“point in different directions”.Otherwise we would not be able to recognize that a family likeyc1,c2(x) = c1 sin2(x)+ c2
(1− cos(2x)
)is not the general
solution of sin(x)y′′− cos(x)y′ +2sin(x)y = 0.(The family has only one constant, because2sin2(x) = 1− cos(2x).)
Let f1, f2, . . . , fn be functions. Then any sumn
∑i=1
cifi = c1f1 + c2f2 + · · ·+ cnfn
with the ci being real numbers is called a linear combinationof the functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Combinations of FunctionsWe need to determine what it means that several functions“point in different directions”.Otherwise we would not be able to recognize that a family likeyc1,c2(x) = c1 sin2(x)+ c2
(1− cos(2x)
)is not the general
solution of sin(x)y′′− cos(x)y′ +2sin(x)y = 0.(The family has only one constant, because2sin2(x) = 1− cos(2x).)
Let f1, f2, . . . , fn be functions. Then any sumn
∑i=1
cifi = c1f1 + c2f2 + · · ·+ cnfn
with the ci being real numbers is called a linear combinationof the functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for Functions
A set of n functions {f1, . . . , fn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1f1 + · · ·+ cnfn = 0. That is, c1, . . . ,cn must be suchthat for all x in the domain of f1, . . . , fn we havec1f1(x)+ · · ·+ cnfn(x) = 0.If no such numbers exist, then the set of functions is calledlinearly independent. That is, a set of n functions {f1, . . . , fn}is called linearly independent if and only if the only numbers
c1, . . . ,cn, for whichn
∑i=1
cifi = 0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for FunctionsA set of n functions {f1, . . . , fn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1f1 + · · ·+ cnfn = 0. That is, c1, . . . ,cn must be suchthat for all x in the domain of f1, . . . , fn we havec1f1(x)+ · · ·+ cnfn(x) = 0.
If no such numbers exist, then the set of functions is calledlinearly independent. That is, a set of n functions {f1, . . . , fn}is called linearly independent if and only if the only numbers
c1, . . . ,cn, for whichn
∑i=1
cifi = 0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Linear Independence for FunctionsA set of n functions {f1, . . . , fn} is called linearly dependent ifand only if there are numbers c1, . . . ,cn, which are not all zero,such that c1f1 + · · ·+ cnfn = 0. That is, c1, . . . ,cn must be suchthat for all x in the domain of f1, . . . , fn we havec1f1(x)+ · · ·+ cnfn(x) = 0.If no such numbers exist, then the set of functions is calledlinearly independent. That is, a set of n functions {f1, . . . , fn}is called linearly independent if and only if the only numbers
c1, . . . ,cn, for whichn
∑i=1
cifi = 0 are c1 = c2 = · · · = cn = 0.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
The Wronskian
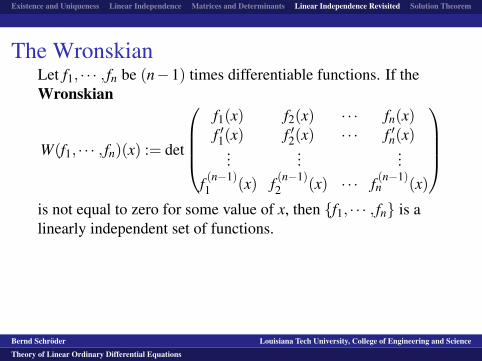
Let f1, · · · , fn be (n−1) times differentiable functions. If theWronskian
W(f1, · · · , fn)(x) := det
f1(x) f2(x) · · · fn(x)f ′1(x) f ′2(x) · · · f ′n(x)
......
...f (n−1)1 (x) f (n−1)
2 (x) · · · f (n−1)n (x)
is not equal to zero for some value of x, then {f1, · · · , fn} is alinearly independent set of functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
The WronskianLet f1, · · · , fn be (n−1) times differentiable functions. If theWronskian
W(f1, · · · , fn)(x) := det
f1(x) f2(x) · · · fn(x)f ′1(x) f ′2(x) · · · f ′n(x)
......
...f (n−1)1 (x) f (n−1)
2 (x) · · · f (n−1)n (x)
is not equal to zero for some value of x, then {f1, · · · , fn} is alinearly independent set of functions.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)
−1 ·det(
et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
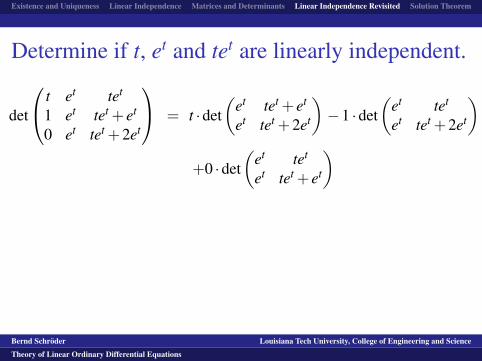
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)
= t(
te2t +2e2t − te2t − e2t)
−(
te2t +2e2t − te2t)
= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
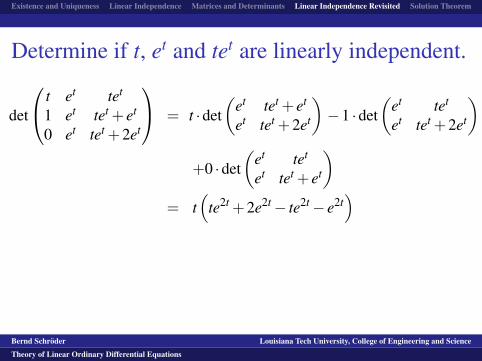
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)
−(
te2t +2e2t − te2t)
= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
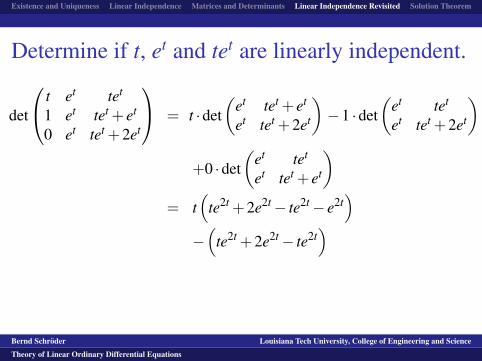
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)
= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
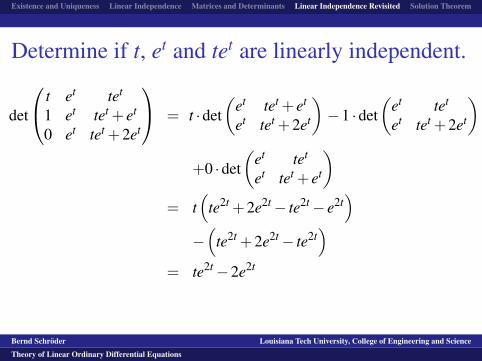
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t
6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
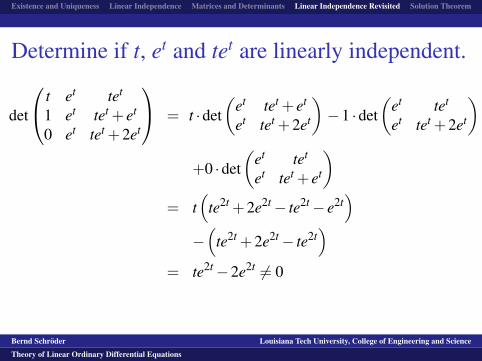
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
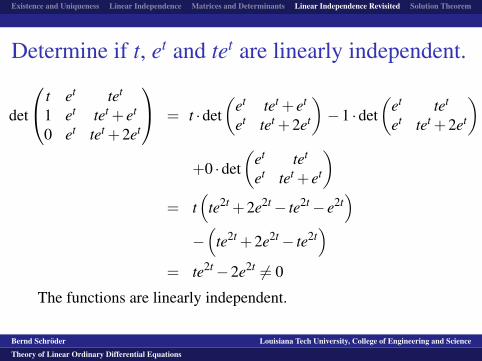
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Determine if t, et and tet are linearly independent.
det
t et tet
1 et tet + et
0 et tet +2et
= t ·det(
et tet + et
et tet +2et
)−1 ·det
(et tet
et tet +2et
)
+0 ·det(
et tet
et tet + et
)= t
(te2t +2e2t − te2t − e2t
)−
(te2t +2e2t − te2t
)= te2t −2e2t 6= 0
The functions are linearly independent.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Defining the General Solution
The general solution of a differential equation is a family offunctions so that for every initial value problem for thedifferential equation there is a unique choice of the coefficientsthat gives the solution of the initial value problem. A particularsolution of a differential equation is one specific solution.
In the theory, we typically work with initial value problems,because even this definition is a bit messy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations

logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Defining the General SolutionThe general solution of a differential equation is a family offunctions so that for every initial value problem for thedifferential equation there is a unique choice of the coefficientsthat gives the solution of the initial value problem. A particularsolution of a differential equation is one specific solution.
In the theory, we typically work with initial value problems,because even this definition is a bit messy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Defining the General SolutionThe general solution of a differential equation is a family offunctions so that for every initial value problem for thedifferential equation there is a unique choice of the coefficientsthat gives the solution of the initial value problem. A particularsolution of a differential equation is one specific solution.
In the theory, we typically work with initial value problems,because even this definition is a bit messy.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Solution Theorem for Linear HomogeneousDifferential Equations
The general solution of a linear homogeneous differentialequation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= 0,
is of the form
y(x) = c1y1(x)+ · · ·+ cnyn(x),
where {y1, · · · ,yn} is a linearly independent set of particularsolutions of the linear homogeneous differential equation.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations
logo1
Existence and Uniqueness Linear Independence Matrices and Determinants Linear Independence Revisited Solution Theorem
Solution Theorem for Linear HomogeneousDifferential Equations
The general solution of a linear homogeneous differentialequation
an(x)y(n)(x)+an−1(x)y(n−1)(x)+· · ·+a1(x)y′(x)+a0(x)y(x)= 0,
is of the form
y(x) = c1y1(x)+ · · ·+ cnyn(x),
where {y1, · · · ,yn} is a linearly independent set of particularsolutions of the linear homogeneous differential equation.
Bernd Schroder Louisiana Tech University, College of Engineering and Science
Theory of Linear Ordinary Differential Equations














