
The Value of Travel Time and Reliability-Evidence from a ... Value of Travel... · The Value of...
26
The Value of Travel Time and Reliability-Evidence from a Stated Preference Survey and Actual Usage Prem Chand Devarasetty, Ph.D. Candidate Zachry Department of Civil Engineering Texas A&M University CE/TTI Building, Room No.410-E College Station, TX-77843-3136 [email protected] Mark Burris*, Ph.D., P.E., E.B. Snead I Associate Professor Zachry Department of Civil Engineering Texas A&M University CE/TTI Building, Room No.304-C College Station, TX-77843-3136 Phone: (979)845-9875, Fax: (979)845-6481 [email protected] W. Douglass Shaw, Ph.D. Dept. of Agriculture Economics and Hazard Reduction and Recovery Center Texas A&M University College Station, TX-77843-2124 [email protected] Prepared for Possible Publication in the Journal of Transportation Research Part A: Policy and Practice Number of words = 6107, Number of Figures= 3, Number of Tables = 7 Total = 10x 250+ 6107= 8607 April 2012 *Corresponding Author
Transcript of The Value of Travel Time and Reliability-Evidence from a ... Value of Travel... · The Value of...

The Value of Travel Time and Reliability-Evidence from a Stated Preference Survey and Actual Usage
Prem Chand Devarasetty, Ph.D. Candidate
Zachry Department of Civil Engineering Texas A&M University
CE/TTI Building, Room No.410-E College Station, TX-77843-3136
Mark Burris*, Ph.D., P.E., E.B. Snead I Associate Professor
Zachry Department of Civil Engineering Texas A&M University
CE/TTI Building, Room No.304-C College Station, TX-77843-3136
Phone: (979)845-9875, Fax: (979)845-6481 [email protected]
W. Douglass Shaw, Ph.D. Dept. of Agriculture Economics and
Hazard Reduction and Recovery Center Texas A&M University
College Station, TX-77843-2124 [email protected]
Prepared for Possible Publication in the Journal of Transportation Research Part A: Policy and Practice
Number of words = 6107, Number of Figures= 3, Number of Tables = 7
Total = 10x 250+ 6107= 8607
April 2012
*Corresponding Author

1 Devarasetty, Burris, and Shaw
Abstract
This research examined travel behavior of Managed Lane (ML) users to better understand the value travelers place on travel time savings and travel time reliability. We also highlight the importance of survey design techniques. These objectives were accomplished through a stated preference survey of Houston’s Katy Freeway travelers. Three stated choice experiment survey design techniques were tested in this study: Bayesian (Db) efficient, random level generation, and an adaptive random approach. Mixed logit models were developed from responses using each of those designs. The value of travel time savings (VTTS) estimates do vary across the design strategies, with the VTTS estimates based on the Db-efficient design being approximately half the estimates from the other two designs. However, among the three design strategies, the value of travel time reliability (VOR) was only significant in the Db-efficient design.
The estimated VTTS from actual Katy Freeway usage (as measured using actual tolls paid and travel time saved on the managed lanes) is $51/hour. This likely also includes any value that travelers place on travel time reliability. In comparison, our combined estimate of VTTS and VOR based on the SP survey (Db-efficient design) was $50/hour, which is remarkably close to the estimate from the actual usage data. Based on our dataset, the Db-efficient design technique proved superior to the other two techniques. Finally, this research also supports the importance of including both travel time and travel time reliability parameters when estimating the willingness to pay for, and therefore benefits derived from, ML travel.
Key Words: Managed lanes, Stated preference survey, Survey design, Value of travel time savings, Value of travel time reliability.

2 Devarasetty, Burris, and Shaw
1. Introduction
In this study we use the popular stated choice experiment method (SCE) to analyze urban commuting decisions related to automobile traffic congestion and the use of managed lanes for travel. The SCE is a rigorous, accepted method among transportation modelers and economists (see Small et al. 2005). Traffic congestion is a major problem in many large cities, and the location where our study was conducted, Houston, Texas (USA), is certainly no exception. Congestion is associated with billions of dollars each year in lost hours of time for those stuck in traffic, in wasted fuel, and in polluting the environment (Schrank and Lomax, 2009). The concept of managed lanes (MLs) is an operational strategy to reduce this problem of congestion by intelligently allocating traffic capacity to different lanes. The Federal Highway Administration (FHWA) defines MLs as “a limited number of lanes set aside within an expressway cross section where multiple operational strategies are utilized, and actively adjusted as needed, for the purpose of achieving pre-defined performance objectives” (FHWA, 2004).
Managed lanes are becoming increasingly popular in the United States, partially due to the FHWA value pricing program efforts. Houston’s Katy Freeway is one of these ML facilities and is the focus in this current study.
This paper focuses on estimating both the value of travel time savings (VTTS, often referred as value of time [VOT]), and also the value of travel time reliability (VOR). The VTTS is the marginal rate of substitution between the travel time and cost in the choice models (Brownstone and Small, 2005; De Jong et al., 2007). Similarly, the VOR indicates the value travelers place on the reliability of estimated travel time and measures the willingness to pay to reduce the variability of travel time (Brownstone and Small, 2005). Though related, there is no reason to assume the two are equal, as individuals may have different preferences for time saved, and reliability gained. Empirical estimates of VOR have in fact varied considerably, ranging from as low as 0.55 times (Black and Towriss, 1993) to 3.22 times (Small et al., 1999) the VOT, on average. Brownstone and Small (2005), using the data from SR-91 and I-15 high occupancy toll (HOT) lanes, estimated the VOR to be 95 to 140 percent of the median travel time. Small et al. (2005) calculated the median VOR using revealed preference (RP) data of travelers in Los Angeles and estimated it be $19.56/hr or 85 percent of the average wage rate. A recent study by Tilahun and Levinson (2010) found travelers’ VOR to be quite close to their VTTS. Concas and Kolpakov (2009) reviewed the literature on VOT and VOR and recommended that the VOR could be estimated to be 80 to 100 percent of the VOT under ordinary travel circumstances, i.e., with no major travel constraints. However, under the constraint of non-flexible arrival/departure, they found that the VOR can be valued up to three times that of the VOT.
In this manuscript the VTTS and VOR values are estimated using data collected in a recent SP survey, which was given to travelers who used the Houston area’s Katy Freeway. The SP estimates are compared with actual ML usage data.
The remainder of the paper is organized as follows. A brief description of the Katy Freeway MLs is presented in the next section. That is followed by a description of the SP survey and various survey designs used. Next, SP survey and actual usage data collection efforts are described and following that, the results of the analysis are presented. The final section contains some conclusions and suggestions for future research.

3 Devarasetty, Burris, and Shaw
2. Katy Freeway
The Katy Freeway has (for most of its length) four general purpose lanes (GPLs) and three frontage road lanes in each direction. It extends over 23 miles connecting the nearby city of Katy to the city of Houston. In addition to these lanes, a portion (12 mile stretch) of the Katy Freeway near downtown was designed with two additional MLs in each direction (TxDOT, 2009). The construction of the Katy Freeway was completed in October 2008 and the MLs were initially opened as high occupancy vehicle (HOV) lanes one month later, in November. They opened for paid SOV use in April 2009.
The 12 mile Katy Freeway MLs extend from west of SH6 to the I-10/I-610 interchange (see Figure 1) with six lanes in each direction, of which four are general purpose lanes and two are MLs. The ML facility is operated and maintained by the Harris County Toll Road Authority (HCTRA). The MLs were fully operational beginning April 10, 2009. Unlike HOV lanes, which are only for people traveling with two or more passengers, the MLs are open to both SOVs and HOVs. The ML which is closer to the median is an HOV lane while the outer ML is open to SOVs. The SOVs must pay a toll during all times of day. The current tolls for SOVs are $4.00, $2.00, and $1.00 for 12 miles during peak, shoulder, and off-peak hours, respectively. For HOVs, the toll is $1.00 during off-peak periods and free during peak and shoulder hours. The toll can only be paid by electronic toll collection (EZTag or TxTag) (HCTRA, 2009). Metro Transit vehicles do not pay a toll. These MLs were designed and priced to maintain a minimum travel speed of 45 mph for 90 percent of the peak periods.
Figure 1: Katy Freeway Managed Lanes and Sensor Location (TxDOT, 2009; Google Maps, 2011)

4 Devarasetty, Burris, and Shaw
3. Survey Description
The survey questionnaire used in the analysis consisted of five sections. The first section asked the respondents details about their most recent actual trip on the Katy Freeway, providing RP data. About one half of the respondents were asked about their actual trip toward downtown Houston and the other half about their trip away from downtown. In the second section, respondents were introduced to the new MLs and were asked about their use of those lanes [see Burris et al. (2011) for the complete survey questionnaire].
The third section was intended to identify the risk-taking behavior or preferences of the respondents with one risk-aversion question presented in the survey. In the fourth section, the respondents were presented with SP questions, which are discussed in detail in the next section of this paper, and the last section consisted of questions regarding socio-economic characteristics of the respondents.
3.1 Stated Preference Question Design
Three pairs of SP questions were presented to each respondent. Each pair consisted of two hypothetical travel scenarios; a normal situation and an urgent situation. In this paper however, only the responses from the normal scenarios were analyzed. Approximately half of the respondents received a question in picture format, while the other half received a question using a text only format (see Figure 2a and 2b). These formats were selected based on a pilot survey, during which several methods to represent travel time reliability were tested. The respondents in the pilot survey included people at various educational backgrounds, spread over different age groups. Note that we have used combined responses from both of these formats in our results as there were similar responses to each format.
In each pair of SP questions the respondent was asked to consider a realistic travel scenario on the Katy Freeway with four different modes of travel available.
1) Drive Alone on the General Purpose Lanes (DA-GPL). 2) Carpool on the General Purpose Lanes (CP-GPL). 3) Drive Alone on the Managed Lanes (DA-ML). 4) Carpool on the Managed Lanes (CP-ML).
The modes varied based on toll, travel time, and travel time reliability values that were presented to the respondent. The toll values were initially based on the actual tolls on the Katy Freeway, but vary considerably based on the survey design; this is an advantage of SP models over those which solely rely on revealed preference (RP) data. Often, in an RP setting, there is simply not enough variation in tolls or other costs, to be able to empirically ascertain the influence of the toll on choices. SP surveys do not have that limitation, but the levels of mode attributes do need to be realistic so that respondents do not reject the scenarios presented to them. The consistency of preferences based on SP and RP data can be tested, and has been supported in many transportation studies (e.g. Small et al. 2005).
Travel time reliability can be defined in numerous ways. Small et al. (2005) investigated the comprehension of various percentiles of a distribution in defining reliability because of the

5 Devarasetty, Burris, and Shaw
importance of the tails of a probability distribution, but concluded this definition would be too difficult to use in presentation for laypeople who are respondents to a SP survey. Here we simply define it as the percentage of travel time variation away from a mean travel time. For example, in Figure 2a the travel time variability on the GPLs is 30 percent (30 percent x 21 minutes is 6 minutes) while it is only 10% on the MLs. The measure of reliability for GPL modes is 6 minutes and for ML modes it is 1 minute. Travel time variability is an indicator of the reliability or the un-reliability of a mode, higher variation in travel time indicates lower reliability and lower variation in travel time indicates higher reliability. Several relationships were maintained in the design because of expectations that travelers probably have. First, the toll for mode CP-ML was set lower than the toll for DA-ML. Second, the travel time on the MLs was set lower than or equal to the travel time on the general purpose lanes. MLs are designed to provide more reliable and faster travel, the travel time variability (the percentage variation of travel time from the average travel time) on the MLs was set lower than that of the general purpose lanes.
For each respondent, trip scenarios were generated based on the details of the actual most recent trip that he or she took, i.e. the trip’s purpose, time of day, distance, entry and exit locations, etc.. Mode attributes (toll, travel time, travel time reliability) for each trip scenario were generated using three different survey design techniques: Db-efficient, random attribute level generation, and adaptive random. These designs techniques are explained and discussed in the next section.

6 Devarasetty, Burris, and Shaw
Figure 2a: A Typical Scenario in Picture Format with Different Modes of Travel
Figure 2b: Typical Scenario in Word Format with Different Modes of Travel

7 Devarasetty, Burris, and Shaw
3.1.1 Db-Efficient Design
One of the design strategies used in this study was a Bayesian efficient design. Efficiency in design means that the parameters have been estimated using an approach that results in the smallest standard errors for the parameters, ensuring the largest possible t-statistics for independent variables that indicate significant difference from a zero influence on the choices (Bliemer et al., 2008). For generating efficient designs, the attribute levels across various choice sets are chosen based on an appropriate efficiency criterion. The fundamental concept behind the efficiency criterion for generating choice designs is to therefore minimize the asymptotic standard errors (the square roots of the diagonal elements of the asymptotic variance-covariance [AVC] matrix) of the parameter estimates of the discrete choice models (Bliemer et al., 2008). D-efficient designs are those that are obtained by minimizing the D-error (a measure of efficiency calculated as the determinant of the AVC matrix) of the AVC matrix of the parameter estimates of the discrete choice model (Bliemer et al., 2008; Huber and Zwerina, 1996). Db-efficient, or Bayesian efficient, designs are found by minimizing the Db-error (Sándor and Wedel, 2001; Scarpa and Rose, 2008; Rose and Bliemer. 2008; Ferrini and Scarpa, 2007). The Bayesian Db-error is different than the D-error and can be calculated using Equation 1.
D error det | / | (1)
where, X is the matrix of attribute levels in the design,
is a vector of parameter priors,
| is the joint distribution of the assumed parameter priors,
are the corresponding parameters of the distribution, and
K is the number of parameters in the model.
The computation of the integral in Equation 1 is complicated, as it cannot be calculated analytically, but it can be approximated using several methods. In this study, 1000 random draws were used to simulate the distribution and estimate the integral. Normal distributions with non-zero means were assumed for the priors. The mean values of priors for the attributes toll and speed were obtained from the discrete choice models estimated from a Katy Freeway SP survey conducted in 2008 (see Patil et al. (2011a) and Patil et al. (2011b) for details on the 2008 survey), and from the most relevant and recent literature for travel time reliability (we used the coefficient of unreliability of travel time from the Small et al. 2005 study, after making a necessary transformation). The mean and standard deviation of the priors used for obtaining the Db-efficient design and the exact levels of attributes used for each mode at different times of day are shown in Table 1.
The N-Gene software package was used to generate the Db-efficient designs for this survey design strategy (N-Gene, 2009). To proceed, a basic MNL was specified for the discrete choice model, and the priors were simulated using Pseudo-Random Monte Carlo simulation with 1,000 independent draws from the prior distributions. The design for peak hours obtained from the software is shown in Table 2. The values shown in Table 2 were used, with no random variation, to calculate the attributes drawn to the respondent for each mode. The corresponding

8 Devarasetty, Burris, and Shaw
Bayesian designs for other times of day were obtained by replacing the attribute levels, as shown in Table 1. The design has 24 rows divided into 3 blocks of 8 rows. Each respondent was randomly given a choice set from each block. The Db-error for the design was found to be 0.0497. The smaller the Db-error, the more efficient the design. The Db-error for this design is very close to zero; hence, the design is an efficient design.
Table 1: Mean, Standard Deviation of Attribute Priors, and Attribute Levels
Attribute
Attribute Levels Mean
Value of Priors
Standard Deviation of Priors
Mode
Time of Day Peak
Hours Shoulder
Hours Off-Peak
Hours
Toll (cents/mile)
CP-ML 0,5,10 0,2.5,5 0,1.3,3.3
-0.19 0.1 DA-ML 8,17,35 4,8.5,17.5 2.6,5.6,11.6
CP-GPL 0 0 0
DA-GPL 0 0 0
Speed (mph)
CP-ML 55,60,65 55,60,65 60,65,70
-0.1* 0.7 DA-ML 55,60,65 55,60,65 60,65,70
CP-GPL 25,35,45 30,40,50 45,50,55
DA-GPL 25,35,45 30,40,50 45,50,55
Travel Time Variability (% of mean travel time)
CP-ML 5,10,15 5,10,15 5,10,15
-0.5 0.5 DA-ML 5,10,15 5,10,15 5,10,15
CP-GPL 20,35,50 20,35,50 20,35,50
DA-GPL 20,35,50 20,35,50 20,35,50
*Prior is a coefficient of travel time estimated from the 2008 Katy Freeway survey. It was adjusted based on the relationship between travel time and speed to use it as a prior for speed.
From the attribute levels generated from this design, the travel time, toll, and travel time reliability values are calculated for each of the modes. As an example, consider the following scenario where a respondent answered that he traveled 15 miles on the Katy Freeway during peak hours, 5 miles on the section without the MLs, and 10 miles on the section with the MLs. The average speed on the former section was assumed to be 60 mph irrespective of the time of day, as this section is far from downtown and often has free-flow speeds. Assume the following values for the speed, toll rate, and travel time reliability for the section with MLs: average speed on GPLs is 45 mph and the reliability of travel time is −30 percent to +30 percent of the mean travel time. Let average speed on MLs be 65 mph, the toll for SOVs is 30 cents/mile, there is no toll for HOVs, and the reliability of travel time is −10 percent to +10 percent of the mean travel time on the MLs. Using these assumed values as an example, the average travel time, toll, and maximum and minimum travel time for each mode are calculated, and the resulting example calculations are shown in Table 3.

9 Devarasetty, Burris, and Shaw
Table 2: Db-Efficient Design Generated Using N-Gene Software (for Peak Hours)
Mode CP-ML DA-ML CP-GPL DA-GPL
Choice Situation
Speed (mph)
Toll (cents/ mile)
Travel Time
Variability Speed (mph)
Toll (cents/ mile)
Travel Time
Variability Speed (mph)
Travel Time
Variability Speed (mph)
Travel Time
Variability Block
1 60 10 0.05 60 17 0.05 35 0.5 35 0.5 3
2 60 0 0.15 60 35 0.15 35 0.2 35 0.2 1
3 55 5 0.1 55 17 0.1 45 0.35 45 0.35 1
4 55 0 0.15 55 8 0.15 45 0.2 45 0.2 3
5 55 0 0.1 55 8 0.1 45 0.2 45 0.2 1
6 60 10 0.1 60 17 0.1 35 0.35 35 0.35 3
7 60 10 0.05 60 17 0.05 25 0.5 25 0.5 1
8 65 0 0.15 65 17 0.15 35 0.2 35 0.2 2
9 55 5 0.1 55 35 0.1 45 0.35 45 0.35 2
10 65 10 0.05 65 35 0.05 25 0.5 25 0.5 2
11 60 0 0.15 60 17 0.15 35 0.2 35 0.2 3
12 60 0 0.1 60 17 0.1 35 0.5 35 0.5 3
13 65 5 0.15 65 8 0.15 25 0.35 25 0.35 1
14 60 5 0.1 60 8 0.1 45 0.35 45 0.35 1
15 55 0 0.05 55 35 0.05 35 0.5 35 0.5 2
16 55 5 0.05 55 17 0.05 45 0.35 45 0.35 3
17 60 0 0.05 60 35 0.05 35 0.5 35 0.5 3
18 65 5 0.15 65 35 0.15 25 0.2 25 0.2 2
19 55 5 0.15 55 17 0.15 45 0.35 45 0.35 2
20 65 10 0.1 65 35 0.1 25 0.2 25 0.2 2
21 55 0 0.05 55 8 0.05 45 0.5 45 0.5 1
22 65 5 0.1 65 8 0.1 25 0.35 25 0.35 3
23 65 10 0.15 65 35 0.15 25 0.2 25 0.2 2
24 65 5 0.05 65 35 0.05 25 0.5 25 0.5 1

10 Devarasetty, Burris, and Shaw
Table 3: Calculation of Travel Time, Toll, and Maximum/Minimum Travel Time for Each Mode
DA-GPL CP-GPL DA-ML CP-ML Travel Time on
Section without the MLs (rounded to the
nearest minute)
(5/60)*60 = 5 (5/60)*60 = 5 (5/60)*60 = 5 (5/60)*60 = 5
Travel Time on Section with MLs (rounded to the nearest minute)
(10/45)*60 = 13
(10/45)*60 = 13
(10/65)*60 = 9 (10/65)*60 =
9
Total Travel Time (minutes)
18 18 14 14
Toll None None (0.30*10) =
$3.00 $0.00
Variability of Travel Time (calculated
based on travel time on section with MLs)
(minutes)
(13*0.3) = 4 (13*0.3) = 4 (9*0.1) = 1 (9*0.1) = 1
Maximum Travel Time (minutes)
18 + 4 = 22 18+4=22 14+1=15 14 + 1 = 15
Minimum Travel Time (minutes)
18 – 4 = 14 18 – 4 = 14 14 – 1 = 13 14 – 1 = 13
3.1.2 Random Attribute Level Generation Design
The second type of design strategy used was the random attribute level generation method. In this method, the attribute levels of each attribute (toll per mile, average speed, and travel time reliability) were generated randomly from a corresponding range of values for each attribute. The attribute levels used for each attribute at different times of day are shown in Table 4. In some choice sets generated by this method, there was a small probability that the toll for DA-ML could be smaller than the toll for CP-ML, but note that this would not appear logical to the respondents and would naturally not give them incentives to carpool. Such economically undesirable outcomes in an SP scenario also may lead to scenario rejection. Thus, in the cases where an economically logical relationship was violated, the values were adjusted to maintain the more logical one. If the random values generated for the toll for mode CP-ML were found to be greater than that of mode DA-ML, then the toll for mode CP-ML was reset to 0 cents/mile. If the mean travel time (calculated using randomly generated speed on ML and GPL) for the GPL was found to be lower than that of ML, then the mean travel time of ML was set to be 3 minutes faster than that of the GPL.
The two random designs had a slightly different range for the attribute levels than the Db-efficient design. Because this was not ideal, we checked to see whether this may have significantly impacted to the results. The VTTS [Toll/(Travel TimeGPL-Travel TimeML)] was

11 Devarasetty, Burris, and Shaw
plotted for all the respondents of the DA-ML mode with results from each survey design plotted separately. The three plots were nearly identical. This provided some confidence that the range differences in the design may not have had a significant impact.
Table 4: Attribute Levels Used for Generating Random Attribute Level Design
Attribute Attribute Levels
Time of Day Mode Peak Hours Shoulder Hours Off-Peak Hours
Toll (cents/mile)
CP-ML 0+(0 to 10) 0+(0 to 7) 0+(0 to 5) DA-ML 5+(0 to 28) 5+(0 to 18) 5+(0 to 14.6) CP-GPL 0 0 0 DA-GPL 0 0 0
Speed (mph)
CP-ML 55+(0 to 10) 55+(0 to 10) 60+(0 to 10) DA-ML 55+(0 to 10) 55+(0 to 10) 60+(0 to 10) CP-GPL 20+(0 to 15) 30+(0 to 15) 40+(0 to 15) DA-GPL 20+(0 to 15) 30+(0 to 15) 40+(0 to 15)
Travel Time Variability (% of mean travel time)
CP-ML 5+(0 to 15) 5+(0 to 15) 5+(0 to 15) DA-ML 5+(0 to 15) 5+(0 to 15) 5+(0 to 15) CP-GPL 25+(0 to 25) 20+(0 to 12.5) 15+(0 to 8.6) DA-GPL 25+(0 to 25) 20+(0 to 12.5) 15+(0 to 8.6)
3.1.3 Adaptive Random Design
The third and final design method used was the adaptive random design method. In this method, the attribute levels for the first choice set were generated using the same method used in the random level generation method (see Table 4). For the second and third choice set, the attribute levels were generated partially based on the response to the respondent’s prior choice sets. The values for speed and travel time reliability were generated using the same random method for the second and the third choice set. However, the toll rates were increased by a random percentage anywhere between 15 and 75 if the respondent chose a toll option and decreased between 15 and 50 if the respondent chose a non-toll option for the previous SP question. The same logical checks as in the random attribute levels generation design were used in this design.
4. Data
4.1 Survey Data Collection
The internet-based survey was posted on a Texas Transportation Institute server and was made available for public access through the www.katysurvey.org website. The data collection process started on June 1, 2010, and continued until July 15, 2010. Residents of Houston who use the Katy Freeway on a regular basis or have used it recently were encouraged to participate in the survey. The existence of the survey was advertised to the public through online and news media. To increase the participation in the survey, two gas cards worth $250 each were given to

12 Devarasetty, Burris, and Shaw
two randomly chosen respondents. The contact information for the drawing was stored separately and could not be linked to the survey responses. A total of 4,919 responses were obtained from the survey. However, only 3,325 of those 4,919 responses were sufficiently completed to a point where they were useful for analysis germane to this paper.
Attributes of the household may also influence choices that drivers make. For example, wealthy households in the relevant population might make some traveling choices that are quite different than low-income households. Ideally, one desires a sample that closely mimics the population of interest, however, any sampling and survey implementation process might lead to differences between the sample and the population of interest. First, note that the population of interest is not the entire Houston area population. Rather, for our purpose here, it is the population in the area that travels on the Katy Freeway using automobiles. It is difficult to know the characteristics of this population, but we might suspect that they are younger and more affluent, on average, than the general population (see Patil et al., 2011a). Statistics on a more general population are misleading, nevertheless, the percentage of respondents in each socio-economic category were compared to the 2006 American Community Survey (2006) data of Houston. We also similarly compared these to previous (2003 and 2008) Katy Freeway survey respondents to check for any potential sampling bias (see Table 5). We are aware of the fact that such simple comparisons of simple statistics are not conclusive regarding the potential bias in our sample, but the current survey sample does appear to under-represent the age groups 16 to 24 and 65 or older; for the remaining age groups, it fairly well represents the population of Houston. The survey sample also under represents low-income groups and over represents the higher-income groups when compared to the 2006 American Community Survey statistics.
Although the survey sample differs from the 2006 American Community Survey statistics of Houston in some categories, it may be more similar to the population Katy Freeway automobile travelers. It is in fact close in comparison with previous survey samples of such travelers. The 2008 Katy Freeway survey (see Patil et al. (2011a) and Patil et al. (2011b) for details of this survey) was an online survey similar to the current survey. A 2003 survey (see Burris and Figueroa (2006) for details of this survey) was based on both Internet and mail-based surveys. The survey was mailed to the travelers observed on the Katy Freeway; hence, the 2003 survey sample can be assumed to be closer to the actual Katy Freeway travelers’ demographics than the internet survey sample.

13 Devarasetty, Burris, and Shaw
Table 5: Respondent Characteristics Compared to Other Data Sources
Variable of Comparison
Percentage of Total Respondents Percentage
of Population
2010 Katy Freeway Survey
2008 Katy Freeway Survey
2003 Katy Freeway Survey
2006 American
Community Survey
Statistics Percentage of Males 54 58 63 51
Age
16 to 24 3 2 5 17* 25 to 34 23
71 79 22
35 to 44 23 19 45 to 54 26 18 55 to 64 19
27 16 12
65 and older 6 11 Average number of people in
Household 2.73a 2.73a NA 2.73a
Annual Household Income < $25,000 5 3 2 32
Annual Household Income $25,000 to $75,000 35 29 33 45
Annual Household Income > $75,000 60 68 63 23
*Adjusted value (calculated from age groups 14–18 and 19–24) aAverage value NA = not available
4.2 Actual Managed Lane Usage Data
Other than the data collected using the SP survey, data were also collected on the actual observed usage of the MLs during the year 2009. Two types of vehicle sensors—wavetronix and automatic vehicle identification (AVI)—are installed along the Katy Freeway by TxDOT (see Figure 1 for sensor locations). These sensors collect data on the speed and volume on all the lanes on the Katy Freeway. Data from these sensors were used to estimate the actual travel time savings offered by the MLs. These actual data were combined with information on tolls paid by travelers to estimate the VTTS of Katy Freeway travelers. Finally, this observed estimate of travelers VTTS was compared to the VTTS estimates from the survey.
4.2.1 Observed Traffic Volumes
Observed traffic volume data were collected using the wavetronix sensors. These sensors are located at different locations along east and westbound lanes on the Katy Freeway (see

14 Devarasetty, Burris, and Shaw
Figure 1). Each of these sensors collects the spot speed data on all the vehicles and also counts the number of vehicles passing the sensor on each of the lanes. These data are aggregated for every 30 seconds and are then sent to the server. The aggregated data set includes the sensor number, the date, the time of the day of the 30 second interval, the lane number, the number of vehicles on the lane, and the average speed of those vehicles. The aggregated 30 second data were further aggregated to develop 15 minute interval data. It was found in our investigation that the AVI data appeared to be more accurate (had fewer obvious errors) than the wavetronix data for average speed estimation. So, only traffic volume data were extracted from the wavetronix data. The 15 minute aggregated traffic volume data were then averaged over the year 2009 to get the annual average 15 minute traffic on each of the lanes. Only the weekday traffic volumes excluding major holidays were used to estimate the annual average traffic speeds and volumes.
As mentioned earlier, there are two MLs in each direction (east and west-bound) of the Katy Freeway. During peak hours, HOVs are allowed to travel for free on the left ML and the right is for SOVs that pay a toll. The number of general purpose lanes on the Katy Freeway varies from four to seven in each direction. With these data the average number of vehicles on the GPLs, and the number of HOVs and SOVs on the MLs, for each 15 minute period was obtained for each sensor. These values were then averaged over the length of the MLs.
4.2.2 Observed Travel Time
Observations on the actual time it took to travel the 12 mile section of the Katy Freeway on the MLs and GPLs were made, and calculated using the AVI data. AVI sensors are located on the MLs and the GPLs on each direction of the Katy Freeway (see Figure 1). The sensors cover approximately 11.4 miles of the Katy Freeway. Each AVI sensor identifies each transponder-equipped vehicle based on the vehicle’s unique ID and records the time at which the vehicle is identified. The vehicle IDs recorded at an AVI sensor are matched with the adjacent AVI sensor data and the time difference is calculated to find the time each vehicle has taken to cover the distance between those sensors. From the travel time, the average speed is estimated. For each 15 minute period, the recorded travel time and speed data are averaged and sent to the server. The data include the starting AVI sensor ID, ending sensor ID, date, time of day of the 30 second interval, number of vehicles, average speed, and average travel time.
When the sensor does not detect any vehicle in any 15 minute period, it records negative values for the speed and the travel time. These negative values were therefore eliminated, and the yearly averages for the year 2009 for speed were obtained for each 15 minute period for all the sections. Only weekday data excluding major holidays were used to estimate the annual average speeds on the MLs and the GPLs. The total travel time on the MLs and the GPLs for each 15 minute period of an average day for the 11.4 mile section was then estimated by estimating the average travel times in each direction. Note that we used the entire length of the Katy MLs for the travel time savings. Clearly not all travelers use the MLs for their entire length. However, congestion is fairly uniform along this stretch of road so a traveler using the ML for only a portion of (for example, 1/3) the full, total distance would save a similar portion of travel time (1/3) and pay a similar portion of total (1/3) toll such that the VTTS would still be a reasonably accurate measure.

15 Devarasetty, Burris, and Shaw
5. Results
5.1 Empirical Model Estimation
As discussed earlier, the survey effort resulted in 3,325 completed and useable responses. An almost equal number of responses were obtained from each of the three, competing survey designs. Also, respondents’ mode choice was similar for the two formats (picture versus text only) presented, implying that the respondents likely understood both of the formats similarly. The Mixed logit (MXL) or random parameter logit (RPL) modeling methodology was used to develop mode choice models from the responses from each of those designs. N-Logit software was used for modeling (NLOGIT, 2007). MXL model is a state-of-art tool for modeling discrete choice data (Hensher and Greene, 2003). It allows for both potential observed and unobserved heterogeneity of individuals in the models (Greene et al., 2006). With the mixed logit model, it is also possible to model repeated responses from individuals (panel data), scale differences in data sources (although this is also possible with more basic models), modify error structures, and accommodate heteroscedasticity (non-constant variance) from various sources (Greene et al., 2006; Brownstone and Train, 1998; Ben-Akiva et al., 2001; Bhat and Castelar, 2002; Hensher et al., 2005; Greene and Hensher, 2007; Hensher et al., 2008).
The MXL model requires that a particular probability distribution be defined for all the random parameters (while some can be designated as fixed, non-random parameters). In this study, travel time, travel time reliability parameters, and alternative specific constants (ASCs) were assumed to be random parameters. An unconstrained triangular distribution was assumed for the travel time and the travel time reliability parameters, and a normal distribution was assumed for the ASCs. The toll parameter was assumed to be nonrandom to simplify the estimation of the VTTS and the VOR and to avoid behaviorally implausible values. 200 Halton draws were used for the mixed logit simulation (see Bhat (2001) and Hensher (2001) for more on MXL simulation). The DA-GPL mode was assumed as the base alternative in the model. The MXL models that were estimated are presented in Table 6. For all the models the mean values of the ASCs are all negative, implying that DA-GPL is preferred to other modes, ceteris paribus. The estimated values of the travel time, travel time reliability, and the toll/ hourly wage rate coefficients or parameters are all negative, which is in accordance with intuition, implying that higher values of these variables are less preferred in choosing a mode of travel. It was found that the travel time reliability parameter was not significant, was positive, and was very small in the models for random and adaptive random designs; therefore, it was removed from the final models that use the data from these designs. The statistical practice of the removal of a variable that is insignificant from a model is controversial, but the key point relates to the influence on the remaining coefficients. In our case removal made almost no difference in the significance, and values of, the other remaining coefficients.
The triangular distributions used for travel time and reliability parameters were unconstrained and could therefore yield both negative and positive coefficients over the population. The random parameters output for the survey population generated by Nlogit contained less than 5% of the sample with a positive coefficient for the travel time and less than 15% of the sample had a positive coefficient for the reliability parameter. Although one would

16 Devarasetty, Burris, and Shaw
expect these coefficients to be negative (making the mode less desirable as travel time increases and variation in travel time increases) it is possible that a small percentage of travelers would choose a less desirable option. Data from the I-394 HOT lane in Minnesota reveal (Burris et al., 2012) a small percentage of I-394 drivers choosing to pay for the express lanes even when the GPLs were faster. This is probably due to the perception of better reliability in the express lanes. Similarly, some travelers are paying for ML travel in the off-peak period when travel time reliability may be worse in the MLs. As an additional check to determine the influence of the unconstrained parameters, the model was rerun with constrained distributions for travel time and variability parameters. The resulting coefficients were very similar while the overall model fit ( ) was slightly worse. Thus, we felt not artificially forcing the parameter values to be negative was best and may in fact mimic real travel behavior. The coefficients of the non-random parameters were also in accordance with intuition. People on a recreational or leisure-oriented trip are more likely to carpool using the GPLs, because most of those trips would likely occur during weekends and using MLs during weekends would involve a toll. Respondents who commute to work are more likely to drive alone on MLs than other drivers are. One of the more interesting variables that captures some individual heterogeneity is the dummy variable, “risk taking”, which takes a value equal to 1 if the respondent stated that she or he was more willing to take a risk and 0 if risk averse. The coefficient was significant for the DA-ML mode and had a negative coefficient, implying that people who are risk averse are more likely to choose DA-ML than risk taking people. It should be noted that the respondents’ attitude towards transportation risk was categorized based on their response to a question about such risk-taking in the survey (see Burris et al. 2011 for details on the question).
Note that the hourly wage rate used in the analysis was approximated as the respondents’ annual household income divided by 2,000 (approximate number of work hours in a year). This is a standard calculation in such surveys, as asking an individual his or her hourly wage often proves unproductive. Many households and respondents earn a monthly salary, i.e. they do not earn a known hourly wage so have difficulty reporting one, or they may have two or more jobs and are not sure which of their wages to report. The standard calculation we make leads to an average hourly income and not a “marginal” wage rate, and thus may differ from the marginal wage rate calculated by the ratio of coefficients that closely corresponds to the marginal rate of substitution (MRS) between time and money. The calculated average hourly wage (or income) rate of the entire estimating sample was $34/hour.
The implied mean VTTS estimate based on the random design strategy (see Table 6) was $47/hour (approximately equal to 137 percent of the sample mean hourly wage rate). For the adaptive random design strategy it was $37/hour (about 108 percent of the sample mean hourly wage rate). Both were nearly twice that estimated by the Db-efficient design strategy of $22/hour (63 percent of the sample mean hourly wage rate). Similar VTTS, as estimated by the Db-efficient design, have been found in the literature (see Lam and Small, 2001; Cherlow, 1981; Concas and Kolpakov, 2009). The high values estimated by the random level generation design strategies points out that caution needs to be taken while choosing attribute levels in the design. Only the Db-efficient design strategy led to estimates of a significant coefficient for the VOR (as 82 percent of the sample mean hourly wage or $28/hour) and was the only design that included both VTTS ($22.hour) and VOR ($28/hour). Thus the total VTTS and VOR in the Db-efficient

17 Devarasetty, Burris, and Shaw
design ($50/hour) was not far from the other VTTS estimates. From the above discussion, it can be said that the Db-efficient design better predicted the VTTS and the VOR.
The percentage of correct predictions for the models developed were also compared to investigate the influence of design on the prediction capabilities of the models. The percentage of correct predictions for each mode by each design is presented in Table 6. Burris and Patil (2009) noted that the model that better predicts the smaller trip shares is often more useful to transportation policymakers, as trips by those modes (such as by bike, public transit, etc.) are often difficult to predict but are critical in our efforts for a more sustainable transportation system. It can be seen from the table that both of the random design strategies predicted the ML travel better than the Db-efficient design strategy. The Db-efficient strategy was found to be better in predicting GPL travel than the other two design strategies. Although the random designs were better in predicting the ML travel, travel time reliability parameter did not work in those models and they had a lower overall prediction rate compared to the Db-efficient design. So, overall, the Db-efficient designs performed better than the random designs.
The D-error metric is one of the indicators of the precision of the parameter estimates estimated by a model. Comparison of these values indicates that all the three design strategies yield designs of similar efficiency.
Table 6: Mixed Logit Models from Respondents from the Three Designs
Variable Alternative(s) Coefficient (Standard Error)
Db-Efficient Random Adaptive Random
Random Parameters in the Utility Functions
ASC-CP-GPL CP-GPLM -4.00(0.28)
-4.52
(0.37) -6.84 (0.67)
ASC-DA-ML DA-MLM -1.41(0.21)
-2.36
(0.24) -2.64 (0.33)
ASC-CP-ML CP-MLM -3.84 (0.33)
-4.69 (0.37)
-8.17 (0.80)
Travel Time (minutes) AllM -0.05 (0.02)
-0.08 (0.02)
-0.10 (0.02)
Travel Time Reliability (minutes) AllM -0.06 (0.03)
- -
Nonrandom Parameters in the Utility Functions
Toll($)/Wage Rate ($/hr) All -4.41 (1.58)
-3.53 (1.12)
-5.55 (1.30)
Trip Purpose Recreation (dv) CP-GPL 0.95
(0.24) 0.82
(0.25) 1.55
(0.48)

18 Devarasetty, Burris, and Shaw
Variable Alternative(s) Coefficient (Standard Error)
Db-Efficient Random Adaptive Random
Low Annual Household Income (< $50,000) (dv)
CP-GPL - 0.89
(0.33) -
Medium Annual Household Income ($50-100,000) (dv)
CP-GPL - 0.78
(0.30) -
Peak Period (dv) DA-ML 0.66
(0.19) 0.80
(0.18) 0.90
(0.38)
Male (dv) (male = 1, female = 0) DA-ML -0.57 (0.17)
- -
Risk Taking (dv) (Risk Taking = 1, Risk Averse = 0)
DA-ML -0.57 (0.16)
-0.46 (0.14)
-
Trip Purpose Commute/Work (dv) DA-ML -0.65 (0.17)
-0.34 (0.15)
-1.34 (0.34)
Trip Length (miles) DA-ML - 0.06
(0.01) -
Peak Period (dv) CP-ML 0.63
(0.23) 1.19
(0.24) 2.01
(0.59)
Trip Length (miles) CP-ML - 0.08
(0.02) -
Male (dv) (male = 1, female = 0) CP-ML -0.29 (0.21)
- -
Single Adult Household (dv) CP-ML - -0.64 (0.23)
-1.19 (0.61)
Trip Purpose Recreation (dv) CP-ML 0.66
(0.23) 1.03
(0.20) 1.83
(0.54) Derived Standard Deviations of Random Parameters
ASC-CP-GPL CP-GPL 2.09
(0.20) 1.97
(0.22) 3.57
(0.39)
ASC-DA-ML DA-ML 1.89
(0.15) 1.44
(0.13) 3.50
(0.26)
ASC-CP-ML CP-ML 2.07
(0.18) 2.06
(0.16) 5.66
(0.48)
Travel Time+ (minutes) All 0.22
(0.09) 0.26
(0.05) 0.26
(0.10)
Travel Time Reliability+ (minutes) All 0.48
(0.11) - -
Estimates Mean VTTS (% of Wage Rate) 63 137 108 Mean VOR (% of Wage Rate) 82 - -
Goodness-of-fit Log-likelihood for Constants Only
Model -3386.17 -3625.12 -3265.29

19 Devarasetty, Burris, and Shaw
Variable Alternative(s) Coefficient (Standard Error)
Db-Efficient Random Adaptive Random
Log-likelihood at Convergence -2588.17 -2698.38 -2059.56 Adjusted 0.23 0.25 0.37
D-error 0.0011 0.0013 0.0011
Percent of Correct Predictions
DA-GPL 60.10% 54.90% 58.30%
CP-GPL 7.20% 6.50% 5.10%
DA-ML 25.20% 30.00% 25.80%
CP-ML 12.40% 19.30% 15.90%
All Modes 43.00% 39.60% 42.60%
Note: All the coefficients in the table are significant at 0.05 significance level. MMean of the random parameter estimate. +Spread of the distribution (standard deviation = spread/√6).
Adjusted ρc2 =1- where, log-likelihood for the estimated model, K = number
of parameters in the estimated model, log-likelihood for the constants only model, Kc = number of parameters in the constants only model; ASC = alternative specific coefficient; dv = dummy or indicator variable.
5.2 Actual ML Usage
As described above, the actual traffic volume data on MLs and GPLs were collected using the independent, traffic sensors on the freeway. The actual average percentage of travelers using MLs were plotted to see if travelers were observed to be taking advantage of the MLs (see Figure 3). One of the two managed lanes in each direction is an HOV lane and allows HOVs to travel for free during peak and shoulder hours (5:00 AM to 11:00 AM and 2:00 PM to 8:00 PM). In Figure 3, ML (HOV) represents the HOV lane and ML (pay) represents the SOV lane where a toll is always collected. Recall that these data were obtained from sensors which are placed near the toll sensors, so there could be some vehicles which changed lanes after they were recorded and were therefore classified incorrectly. For example, the sensor where we obtained data might have registered 15 vehicles in the HOV ML and 25 vehicles in the SOV ML. Shortly after passing this sensor, but before the toll sensors, a vehicle could have switched from the HOV ML to the SOV ML. The true volumes would then be 14 HOVs on the ML and 26 SOVs on the ML, but our values would remain 15 and 25. Note that the sensors used here are very close to the toll sensors and very few vehicles change lanes, so this should cause minimal error.
It can be seen from the plot that the percentage of travelers using the MLs as SOVs was almost equal to the percentage of people using MLs as HOVs. During peak hours, almost 20 percent of the Katy Freeway travelers were using the MLs. Surprisingly, even during off-peak hours, some travelers were paying a toll to use the MLs when the expected actual travel time savings are minimal or non-existent because of lack of congestion on the other lanes. Similar findings were also reported by Cho et al. (2011) based on their study on I-394 in Minnesota. It
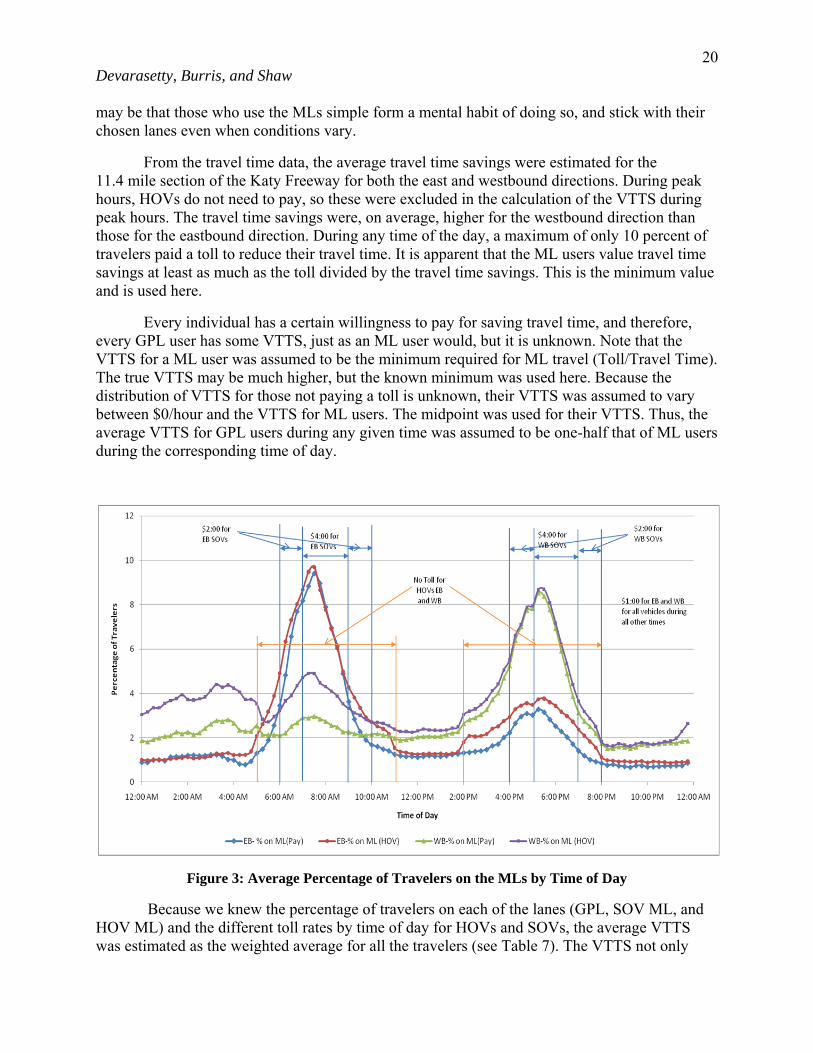
20 Devarasetty, Burris, and Shaw
may be that those who use the MLs simple form a mental habit of doing so, and stick with their chosen lanes even when conditions vary.
From the travel time data, the average travel time savings were estimated for the 11.4 mile section of the Katy Freeway for both the east and westbound directions. During peak hours, HOVs do not need to pay, so these were excluded in the calculation of the VTTS during peak hours. The travel time savings were, on average, higher for the westbound direction than those for the eastbound direction. During any time of the day, a maximum of only 10 percent of travelers paid a toll to reduce their travel time. It is apparent that the ML users value travel time savings at least as much as the toll divided by the travel time savings. This is the minimum value and is used here.
Every individual has a certain willingness to pay for saving travel time, and therefore, every GPL user has some VTTS, just as an ML user would, but it is unknown. Note that the VTTS for a ML user was assumed to be the minimum required for ML travel (Toll/Travel Time). The true VTTS may be much higher, but the known minimum was used here. Because the distribution of VTTS for those not paying a toll is unknown, their VTTS was assumed to vary between $0/hour and the VTTS for ML users. The midpoint was used for their VTTS. Thus, the average VTTS for GPL users during any given time was assumed to be one-half that of ML users during the corresponding time of day.
Figure 3: Average Percentage of Travelers on the MLs by Time of Day
Because we knew the percentage of travelers on each of the lanes (GPL, SOV ML, and HOV ML) and the different toll rates by time of day for HOVs and SOVs, the average VTTS was estimated as the weighted average for all the travelers (see Table 7). The VTTS not only

21 Devarasetty, Burris, and Shaw
varied by the time of the day but also by the direction of travel. The average VTTS for all travelers was $51/hour. It should be noted that there might be few travelers on the GPLs who are willing to pay for ML travel but could not as they do not possess a toll transponder. We examined how the values in Table 7 would change if there exist GPL travelers with no toll transponder, but who are actually willing to pay for travel on the MLs. The values in Table 7 were re-estimated assuming there were sufficient GPL travelers with high VTTS that would increase the ML volumes by 20 percent. This caused almost no change in the values in Table 7 and thus should not be a significant source of error in our rough estimation of VTTS for GPL travelers.
From the three SP survey designs, the average VTTS was estimated to be $22/hour (Db-efficient), $47/hour (random level generation), and $37/hour (adaptive random). Therefore, in two of the three survey designs the SP results were similar to actual usage. In the third design (Db-efficient) the SP result was considerably lower.
Table 7: Average VTTS by Time of Day Calculated from Actual Katy Freeway Usage Data
Time Of Day
Average VTTS ($/hour)
Eastbound
Average VTTS ($/hour)
Westbound Shoulder Hours 70 65
Peak Hours 35 44 Off-Peak Hours 48 48
TOTAL (weighted average) 51
Many travelers use MLs not only for travel time savings but also to increase their travel time reliability. Hence, the average value often estimated from the actual usage ($51/hr) may also include the amount travelers are willing to pay for travel time reliability. However, it is not known what percentage of the $51/hour is paying for travel time reliability versus travel time savings. However, this VOR was estimable from the Db-efficient design survey and was estimated as $28/hour. Thus, the total amount travelers were willing to pay based on the survey using the Db-efficient design was $22 + $28 = $50/hour, which is quite close to the value ($51/hour) calculated from the actual Katy Freeway usage data.
Based on these observations it is quite important to include reliability when attempting to estimate travelers’ complete willingness to pay for ML travel. Without that aspect our models (adaptive random and random level generation) did estimate VTTS in the correct range, but the values are likely comprised of both VTTS and VOR. Using both VTTS and VOR may aid in better traffic and revenue prediction, particularly during off-peak.
6. Summary, Conclusions, and Suggestions for Future Research
The objective of this study was to improve our understanding of traveler behavior, particularly travelers’ VTTS and VOR, and to improve survey design techniques. To achieve

22 Devarasetty, Burris, and Shaw
these objectives, a stated preference survey was designed using three different survey design methods.
A mixed logit modeling technique was used to model the responses from the survey. The average hourly wage rate for the sample was found to be $34/hr. The implied mean VTTS was estimated as 63 percent, 132 percent, and 108 percent of the mean hourly wage using the results from the Db-efficient, random level generation, and adaptive random designs, respectively. Of the three designs, only the Db-efficient design was able to estimate the VOR. It estimated the implied VOR as 82 percent of the mean hourly wage rate. The efficiency of parameter estimation (measured by D-error metric) was found to be similar for the three designs, with Db-efficient slightly more efficient. Based on these results, it can be said that the Db-efficient design was a more effective technique to capture the key data as compared to the other two design techniques.
AVI and wavetronix sensor data were used to obtain average traffic volumes and travel times along the Katy Freeway for all non-holiday weekdays in 2009. During peak periods, nearly 20 percent of the travelers on the Katy Freeway used the MLs, and this dropped to less than 6 percent in the off-peak. Of those using the lanes during the peak, approximately half of them traveled free as an HOV while the other half paid a toll to travel as a SOV. Travelers were paying to use the MLs during off-peak hours when there is often no noticeable travel time savings, although this was less than 6 percent of the total traffic at any time.
During peak hours, the travel time on the GPLs was 60 to 80 percent longer than the travel time on the MLs. The VTTS calculated from the actual data varied by the time of the day and also by direction of travel. Travelers valued their travel time savings higher while driving away from downtown than toward downtown. The implied mean VTTS from the mixed logit models (Db-efficient design) was estimated as 63 percent of the mean hourly wage rate ($22/hour). Comparing it with the calculated VTTS ($51/hour) using the actual Katy Freeway usage data, it can be said that survey estimates are nearly half the actual values. However, the $51/hour travelers are paying likely also includes the value travelers place on travel time reliability of the MLs. The total (VTTS+VOR) amount estimated from the model (Db-efficient design) developed from the survey was $50/hour, which is close to the value estimated from the actual usage.
Our study strongly suggests that travel time reliability should be included in ML related studies, along with the usual focus on travel time savings. The definition of reliability and its presentation in SP surveys needs future work: our approach is but one of many that could be taken. Once the researcher has a response to the reliability variable, it can be used in a variety of ways in modeling. This also needs additional exploration, as reliability intuitively relates to risk preferences that an individual has.
Acknowledgement
The authors recognize that support for this research was provided by a grant from the U.S. Department of Transportation, University Transportation Centers Program to the Southwest Region University Transportation Center, which is funded, in part, with general revenue funds from the State of Texas. The authors would like to acknowledge Sisinio Concas, Senior Research

23 Devarasetty, Burris, and Shaw
Associate, Center for Urban Transportation Research for his valuable insights throughout this study. The authors would like to thank Harris County Toll Road Authority, Houston-Galveston Area Council, and Houston Transtar for their help in spreading the word about the survey. The authors would also like to thank Richard Trey Baker for all the support he provided in hosting the survey. Any errors and omissions are the responsibility of the authors.
References
Ben-Akiva, M., Bolduc, D., Walker, J. (2001) Specification, Identification and Estimation of the Logit Kernel (or Continuous Mixed Logit) Model. MIT Working paper.
Bhat, C.R. (2001) Quasi-Random Maximum Simulated Likelihood Estimation of the Mixed Multinomial Logit Model. Transportation Research Part B: Methodological 35, 677–693.
Bhat, C.R., Castelar, S. (2002) A Unified Mixed Logit Framework for Modeling Revealed and Stated Preferences: Formulation and Application to Congestion Pricing Analysis in the San Francisco Bay Area. Transportation Research Part B: Methodological 36, 593–616.
Black, I.G., Towriss, J.G. (1993) Demand Effects of Travel Time Reliability. UK Department of Transportation, Her Majesty’s Stationery Office, London.
Bliemer, M.C.J., Rose, J.M., Hess, S. (2008) Approximation of Bayesian Efficiency in Experimental Choice Designs. Journal of Choice Modelling 1, 98–127.
Brownstone, D., Small, K.A. (2005) Valuing Time and Reliability: Assessing the Evidence from Road Pricing Demonstrations. Transportation Research Part A: Policy and Practice 39, 279–293.
Brownstone, D., Train, K. (1998) Forecasting New Product Penetration with Flexible Substitution Patterns. Journal of Econometrics 89, 109–129.
Burris, M., Nelson, S., Kelly, P., Gupta, P., Cho, T. (2012) Willingness to Pay for High-Occupancy-Toll Lanes: Empirical Analysis from I-15 and I-394. Proceedings of the 91st Annual Transportation Research Board Meeting, Washington, D.C.
Burris, M., Devarasetty, P., Shaw, D. (2011) Managed Lane Travelers-Do They Pay for Travel As They Claimed They Would? Texas Transportation Institute, The Texas A&M Univeristy System, College Station, TX.
Burris, M., Figueroa, C.F. (2006) Analysis of Traveler Characteristics by Mode Choice in HOT Corridors. Journal of the Transportation Research Forum 45(2), 103–117.
Burris, M., Patil, S. (2009) Estimating the Benefits of Managed Lanes. Texas Transportation Institute, The Texas A&M University System, College Station, TX.
Cherlow, J.R. (1981) Measuring Values of Travel Time Savings. Journal of Consumer Research 7, 360–371.
Cho, Y., Goel, R., Gupta, P., Bogonko, G., Burris, M. (2011) What are I-394 HOT Lane Drivers Paying for? Proceedings of the 90th Annual Transportation Research Board Meeting, Washington, D.C.
Concas, S., Kolpakov, A. (2009) Synthesis of Research on Value of Time and Value of Reliability. Center for Urban Transportation Research, Tampa, FL.
De Jong, G., Tseng, Y., Kouwenhoven, M., Verhoef, E., Bates, J. (2007) The Value of Travel Time and Travel Time Reliability. Technical Report, Significance – Prepared for the Netherlands Ministry of Transport, Public Works and Water Management.

24 Devarasetty, Burris, and Shaw
Federal Highway Administration (FHWA). (2004) Managed Lanes: A Cross-Cutting Study. U.S Department of Transportation.
Ferrini, S., Scarpa, R. (2007) Designs with a Priori Information for Nonmarket Valuation with Choice Experiments: A Monte Carlo Study. Journal of Environmental Economics and Management 53, 342–363.
Google Maps (2011) Katy Freeway Location, http://maps.google.com. Accessed May 15, 2011. Greene, W.H., Hensher, D.A. (2007) Heteroscedastic Control for Random Coefficients and Error
Components in Mixed Logit. Transportation Research Part E: Logistics and Transportation Review 43, 610–623.
Greene, W.H., Hensher, D.A., Rose, J. (2006) Accounting for Heterogeneity in the Variance of Unobserved Effects in Mixed Logit Models. Transportation Research Part B: Methodological 40, 75–92.
HCTRA (2009), Harris County Toll Road Authority, Katy managed lanes frequently asked question, https://www.hctra.org/katymanagedlanes/faq.html. Accessed September 16, 2009.
Hensher, D.A. (2001) The Valuation of Commuter Travel Time Savings for Car Drivers: Evaluating Alternative Model Specifications. Transportation 28, 101–118.
Hensher, D.A, Greene, W. H. (2003) The Mixed Logit model: The State of Practice. Transportation 30, 133–176.
Hensher, D.A., Rose, J.M., Greene, W.H. (2005) Applied Choice Analysis: A Primer. Cambridge University Press, Cambridge, MA.
Hensher, D.A., Rose, J.M., Greene, W.H. (2008) Combining RP and SP data: Biases in Using the Nested Logit ‘trick’ - Contrasts with Flexible Mixed Logit Incorporating Panel and Scale Effects. Journal of Transport Geography 16, 126–133.
Huber, J., Zwerina, K. (1996) The Importance of Utility Balance in Efficient Choice Designs. Journal of Marketing Research 33, 11.
Lam, T.C., Small, K.A. (2001) The Value of Time and Reliability: Measurement from a Value Pricing Experiment. Transportation Research Part E: Logistics and Transportation Review 37, 231–251.
N-Gene User Manual and Reference Guide 1.0 (2009). The Cutting Edge in Experimental Design. Choice Metrics.
NLOGIT Version 4.0 (2007): Reference Guide, Economertric Software, Plainview, NY. Patil, S., Burris, M., Shaw, W.D. (2011a) Travel Using Managed Lanes: An Application of A
Stated Choice Model for Houston, Texas. Transport Policy 18 (2011), p. 595 - 603.. Patil, S., Burris, M., Shaw, W.D., Concas, S. (2011b) Variation in the Value of Travel Time
Savings and its Impact on the Benefits of Managed Lanes. Transportation Planning and Technology, Vol. 34, No. 6, August 2011, p. 547 - 567
Rose, J., and Bliemer, M., 2008. Stated Preference Experimental Design Strategies, In Handbook of Transport Modeling, Hensher, D.A., and Button, K.J. (eds.), Elsevier Oxford, U.K., 151-79.
Sándor, Z., Wedel, M. (2001) Designing Conjoint Choice Experiments Using Managers’ Prior Beliefs. Journal of Marketing Research 38, 430–444.
Scarpa, R., Rose, J.M. (2008) Design Efficiency for Nonmarket Valuation with Choice Modelling: How to Measure It, What to Report and Why?. Australian Journal of Agricultural and Resource Economics 52, 253–282.

25 Devarasetty, Burris, and Shaw
Schrank, D., Lomax, T. (2009) 2009 Urban Mobility Report. Texas Transportation Institute, The Texas A&M University System, College Station, TX.
Small, K.A., Noland, R., Chu, X., Lewis, D. (1999) Valuation of Travel-Time Savings and Predictability in Congested Conditions for Highway User-Cost Estimation. National Cooperative Highway Research, Report 431, Transportation Research Board, National Research Council, Washington, D.C.
Small, K.A., Winston, C., Yan, J. (2005) Uncovering the Distribution of Motorists’ Preferences for Travel Time and Reliability. Econometrica 73, 1367-1382.
Tilahun, N., Levinson, D. (2010) A Moment of Time: Reliability in Route Choice Using Stated Preference. Journal of Intelligent Transportation Systems 14, 9.
TxDOT (2009). Katy Freeway Website, Texas Department of Transportation, www.katyfreeway.org/. Accessed May 15, 2011.
U.S. Census Bureau; American Community Survey, (2006) Summary Tables generated using American FactFinder, http://factfinder.census.gov. Accessed May 15, 2011.


















