Technica Product Line

of 236
-
Upload
leonardo-da-cao-quy -
Category
Documents
-
view
226 -
download
0
Transcript of Technica Product Line
-
7/25/2019 Technica Product Line
1/236
Technical Project Guide
Marine Application
-
7/25/2019 Technica Product Line
2/236
U2 |
-
7/25/2019 Technica Product Line
3/236
I INTRODUCTION | 1
-
7/25/2019 Technica Product Line
4/236
I INTRODUCTION2 |
Tognum is one of the leading suppliers of powerful, high-speed diesel engines and complete
propulsion systems for ships, heavy agricultural and rail vehicles, industrial drive systemsand onsite power generators. Tognums products include not only diesel engines but also
electronics systems, gas engines and gas turbines, fuel-injection systems and drive-shafts, as
well as onsite power generators based on diesel engines, gas engines or fuel cells.
MTU Friedrichshafen GmbH is one of the worlds leading manufacturers of large diesel and gas
engines and complete propulsion systems. MTU Friedrichshafen and MTU Detroit Diesel are the
two core companies of the Tognum Group. Their combined product range is the most modern
and extensive in the industry. MTU also benefits from having the key technologies of electronics
and exhaust turbo-charging in house.
Especially within the marine sector the company has established a long and successful
partnership with hundred thousands of diesel engines in operation around the globe on all the
seas. All diesel engines for marine application are under the brand MTU. Based on its innovative
capabilities, its reliable diesel engines and system competence, MTU disposes of unique
propulsion system know-how and offers a large range of products of excellent quality. MTU
develops, manufactures and sells marine diesel engines in the 200 to 9100 kW power range.
This Technical Project Guide has been compiled with the objective to support operators,
shipyards, consultants, project engineers and sales personnel
in the layout and planning of propulsion plants and electric power supply plants, suitable to
fulfil the tasks of the specific vessel
in the selection of the appropriate diesel engines and monitoring & control systems from the
MTU Sales Program, and
in the successful and reliable integration of propulsion equipment into the vessel.
It should also serve operators and shipyards with background information, helpful to verify and
compare different proposals.
The Technical Project Guide is a source of generally applicable information and
guidelines only.
>
>
>
-
7/25/2019 Technica Product Line
5/236
I INTRODUCTION
2008 Copyright MTU Friedrichshafen GmbH
Printed in Germany
This Publication is protected by copyright and may not be used in any way whether in whole or in
part without the prior written permission of MTU Friedrichshafen GmbH.
This restriction also applies to copyright, distribution, translation, microfilming and storage or
processing on electronic systems including databases and online services.
Subject to alterations and amendments.
Non-standard design requirements as maybe specified by the operator or by classification
societies are not taken into consideration in the scope of this publication. Such requirementsnecessitate clarification on case-to-case basis. The worldwide MTU sales organisation is ready
to offer consultation. Project-related or contract-related specifications take precedence over
the general information appearing in this publication.
The Technical Project Guide is available in two versions:
1 An electronic version within the Business Portal, which is worldwide available to the MTU
Network.
2 As a printed book supplemented by a CD-ROM containing the content again as an electronic
version.
Actual, project specific or official engine data for the different engine series may be provided
by the MTU Distributor Net and can be downloaded from the specific chapters in the Business
Portal.
Well-experienced MTU project engineers with the support of a well-known marine engineering
company, MTG Hamburg, have compiled this publication.
As such a Technical Project Guide could never be complete, we would very much appreciate
any feedback from the users in order to continuously improve and extend the publication.
Stefan Mueller
Director Application Center Marine
| 3
-
7/25/2019 Technica Product Line
6/236
II TABLE OF CONTENTS4 |
Chapter Title Page
I INTRODUCTION 1
II TABLE OF CONTENTS 4
III LIST OF FIGURES 11
1 GENERAL 15
1.1 Designations 15
2 DEFINITION OF APPLICATION GROUPS 16
2.1 General Notes 16
2.2 Marine Main Propulsion and Auxiliary Propulsion Plants 17
2.3 On-Board Electric Power Generation/Auxiliary Power 18
3 SPECIFICATION OF POWER AND REFERENCE CONDITION 19
3.1 Definition of Terms 19
3.1.1 ISO Standard Fuel-Stop Power (ICFN) 19
3.1.2 ISO Standard Power Exceedable by 10 % (ICXN) 20
3.2 Reference Conditions 20
3.3 Intake and Exhaust Pressure Loss 21
3.3.1 General 21
3.4 Inclination 22
3.4.1 Installation Inclination of the propulsion plant 23
3.4.1.1 Permissible installation inclination in longitudinal direction 243.4.1.2 Permissible installation inclination in transverse direction 24
3.5 Load Profile 25
3.6 Time Between Major Overhauls (TBO) 28
4 FLUIDS AND LUBRICANTS SPECIFICATION 29
4.1 General Notes 29
4.2 Approved Fuel for MTU Engines 29
4.2.1 Requirements 29
4.2.2 Low Sulphur Diesel Fuels 30
4.2.3 Diesel Fuels in Winter Operation 304.2.4 Fuel Properties for Calculation Routines 30
4.3 Use of alternative fuels in MTU-engines 30
5 DIESEL ENGINE PERFORMANCE DIAGRAM 31
5.1 General Notes 31
5.2 Load Curves 37
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION 40
6.1 Propulsor 40
6.1.1 Abbreviations 40
6.1.2 Propulsive Devices (Overview) 42
-
7/25/2019 Technica Product Line
7/236
II TABLE OF CONTENTS
Chapter Title Page
6.1.2.1 General characteristics 42
6.1.2.2 Typical arrangements 44
6.1.2.3 Manoeuvring characteristics 46
6.1.3 Shaft Line and Gearbox Losses 48
6.2 Propeller 50
6.2.1 Propeller Geometry 50
6.2.2 Propeller Type Selection 52
6.2.2.1 FPP or CPP 52
6.2.2.2 Propeller size 53
6.2.2.3 Cavitation and thrust breakdown 53
6.2.2.4 Propeller for high speed vessels 53
6.2.3 Direction of Propeller Rotation 54
6.2.4 Selection of Propeller Blade Number 56
6.3 Propeller Curve 57
6.3.1 Basics 57
6.3.2 Theoretical Propeller Curve 62
6.3.3 Estimating the Required Diesel Engine Power 64
6.4 Propeller and Performance Diagram 65
6.4.1 Driving Mode 65
6.4.1.1 General applications 656.4.1.2 Bollard pull 67
6.4.2 Fixed Pitch Propeller (FPP) 69
6.4.3 Controllable Pitch Propeller (CPP) 72
6.5 Waterjet and Performance Diagram 78
6.5.1 Geometry and Design Point 78
6.5.2 Parallel Operation 82
6.5.3 Estimation of Size and Shaft Speed 83
6.6 Fuel Consumption 84
6.6.1 General Assumptions 846.6.2 Operating Profile 86
6.6.3 Fuel Consumption at Design Condition 91
6.6.4 Cruising Range 92
6.6.5 Endurance at Sea 93
6.6.6 Calculating Examples 94
6.6.6.1 Example Data (Series 2000) 94
6.6.6.2 Fuel consumption at design condition 96
6.6.6.3 Fuel tank volume for a given range 97
6.6.6.4 Theoretical cruising range 98
| 5
-
7/25/2019 Technica Product Line
8/236
II TABLE OF CONTENTS6 |
Chapter Title Page
6.6.6.5 Annual fuel consumption for an operating profile 99
6.6.6.6 Correcting the lower heating value 100
6.7 Generator Drive 102
7 APPLICATION AND INSTALLATION GUIDELINES 103
7.1 Diesel Engine/Gearbox Arrangements 103
7.1.1 General notes 103
7.1.2 Diesel Engine with Flange-Mounted Gearbox (F-Drive) 106
7.1.2.1 General notes 106
7.1.3 Diesel Engine with Free-Standing Gearbox, V-Drive Inclusive 1077.1.3.1 General notes 107
7.1.4 Diesel Engine with Free-Standing Gearbox, Universal Shaft and V-drive108
7.1.4.1 General notes 108
7.2 Foundation 109
7.3 Generator Set Arrangement 110
7.3.1 General Notes 110
7.3.2 Diesel Engine with Free-Standing Generator 111
7.3.3 Diesel Engine with Flange-Mounted Generator 112
7.4 System Interfaces and System Integration 112
7.4.1 Flexible Connections 112
7.4.1.1 Notes on installation 113
7.4.1.2 General notes on system routing: 113
7.4.1.3 Hose connections: 116
7.4.1.4 Bellows connections 117
7.4.2 Combustion Air and Cooling/Ventilation Air Supply 118
7.4.2.1 General notes 118
7.4.2.2 Combustion air intake from engine room 120
7.4.2.3 Combustion air intake directly from outside (special application) 121
7.4.2.4 Cooling/ventilation air system 123
7.4.3 Exhaust System 125
7.4.3.1 Silencers 126
7.4.3.2 Arrangements, support and connection for pipe and silencer 127
-
7/25/2019 Technica Product Line
9/236
II TABLE OF CONTENTS | 7
Chapter Title Page
7.4.3.3 Acoustic data: 1297.4.3.4 Exhaust discharge system, pressure losses 129
7.4.3.5 Flexible adapters (bellows) 133
7.4.3.6 Insulation for exhaust pipework: 133
7.4.3.7 Water-cooled exhaust system 133
7.4.4 Cooling Water System 136
7.4.4.1 Cooling water system with on-engine mounted heat exchanger 137
7.4.4.2 Cooling water system with separately -mounted heat exchanger 138
7.4.4.3 Central cooling water system 139
7.4.4.4 Sea chest construction for ice ships 140
7.4.4.5 Ship heating 141
7.4.5 Fuel System 142
7.4.5.1 Preface 142
7.4.5.2 Fuel systems 142
7.4.5.3 Fuel treatment plant in scope of supply of the shipyard (not MTU) 145
7.4.5.4 General notes 146
7.4.5.5 Design data 147
7.4.6 Lube Oil System 150
7.4.7 Starting System 153
7.4.7.1 Electric starter motor 153
7.4.7.2 Compressed-air starting, compressed-air starter motor 154
7.4.7.3 Starting aid measures 157
7.4.8 Electric Power Supply 158
7.5 Emission 159
7.5.1 Exhaust Gas Emission, General Information,
Exhaust Gas After-Treatment 159
7.5.2 Acoustical Emission, General Information 161
7.5.2.1 Airborne noise level 162
7.5.2.2 Exhaust gas noise level 164
7.5.2.3 Structure-borne noise level 165
-
7/25/2019 Technica Product Line
10/236
II TABLE OF CONTENTS8 |
Chapter Title Page
7.6 Mechanical Power Transmission 1727.7 Auxiliary Power Take-Off (PTO), Power Take-In (PTI) 177
7.7.1 Diesel Engine Mounted PTO 177
7.7.2 Gearbox Mounted PTO/PTI 178
7.7.2.1 Gearbox shaft mounted auxiliary PTO 178
7.7.2.2 Gearbox top mounted PTO or PTI 179
7.7.2.3 Diesel engine with free end PTO 180
7.8 Torsional Vibration 180
7.9 Alignment 183
7.9.1 Preparation for alignment 183
8 CLASSIFICATION AND ACCEPTANCE TEST 184
8.1 Explanation of Important Classification and Acceptance Terms 184
8.1.1 Classification Societies 184
8.1.2 Ship Classification 184
8.1.3 List of Classification Societies 187
8.1.4 Characters of Classification and Notations 188
8.1.5 Type Approval/Prototype Test 191
8.1.6 Drawing Approval (Design Approval/Design Appraisal) 191
8.1.7 Classification Acceptance 191
8.1.8 Test run control 191
8.1.9 Factory Acceptance Test (FAT) 192
8.2 Acceptance Test According to a Classification Society 192
8.2.1 Main Diesel Engines for Direct Propeller Drive 192
8.2.2 Main Diesel Engines for Indirect Propeller Drive 192
8.2.3 Diesel Engines for Auxiliary and Electric Generator Drives 192
8.3 Example Documents 193
9 DIESEL ENGINE CONTROL SYSTEM 200
9.1 General 200
9.2 Typical Engine Room Installation with Automation Product Line
blueline with ADEC 201
-
7/25/2019 Technica Product Line
11/236
II TABLE OF CONTENTS | 9
Chapter Title Page
10 SHIP AUTOMATION SYSTEMS 20210.1 Series System Automation Product Lines 202
10.1.1 smartline 204
10.1.1.1 Additional Key Features 204
10.1.1.2 Typical Configuration, Visualization ex. for
Colour Graphic Display 6.5 204
10.1.2 blueLine 206
10.1.2.1 Additional Key Features 206
10.1.2.2 Typical Configuration 206
10.1.3 Blue vision 208
10.1.3.1 Additional Key Features 208
10.1.3.2 Typical Configuration, Visualization example for
TFT Colour screen 19 209
10.2 System package maritune 211
10.2.1 Key Features 211
10.2.2 Typical Configuration 212
10.2.3 Principle function of maritune 212
10.3 Project System (IMCS = Integrated Monitoring and Control System) 212
10.3.1 Key Features 212
10.3.2 Typical Configuration, Visualization example for
TFT Colour screen 19 214
11 MAINTENANCE CONCEPT / MAINTENANCE SCHEDULE 216
11.1 Reason for Information 216
11.2 Advantages of the new Maintenance Concept 216
11.3 Maintenance Schedule 216
11.3.1 Cover Sheet 217
11.3.2 Maintenance Schedule Matrix Series 4000 Application Group 1A 218
11.3.3 Task List 220
12 ASSEMBLING INSTRUCTIONS (TRANSPORT, STORAGE, STARTING) 223
12.1 Transportation 223
12.2 Storage and Initial Start-Up 223
-
7/25/2019 Technica Product Line
12/236
II TABLE OF CONTENTS10 |
Chapter Title Page
13 INSTALLATION DESCRIPTION 224APPENDIX 225
A ILLUSTRATION REFERENCES 226
B CONVERSION TABLE 227
C GLOSSARY 231
-
7/25/2019 Technica Product Line
13/236
III LIST OF FIGURES | 11
Figure Title Page
Figure 1.1.1: Diesel engine designations (sides, cylinders, direction of rotation) 15Figure 3.4.1: Inclination 22
Figure 3.4.2: Movements described about its axes by a vessel when afloat 23
Figure 3.4.3: Operating angle of inclination shown in diagrammatic form 24
Figure 3.5.1: Standard Load Profiles 25
Figure 3.6.1: TBO definition of MTU 28
Figure 5.1.1: Structure diesel engine performance diagram 31
Figure 5.1.2: Diesel engine performance diagram 35
Figure 5.1.3: Load profile and TBO: Contract specific addition 36
Figure 5.2.1: Monohull (displacement vessel without planing) 37
Figure 5.2.2: Monohull (displacement vessel with planing) 38
Figure 5.2.3: Catamaran (multihull, never planing) 38
Figure 5.2.4: Propeller curves with hump in performance diagram 39
Figure 6.1.1: Scheme of a propulsive unit (side view) 40
Figure 6.2.1: Scheme of propeller geometry (skew and rake) 50
Figure 6.2.2: Propeller clearance 52
Figure 6.3.1: Trial condition (example) 57
Figure 6.3.2: Influence of change in resistance on effective power curve (example) 58
Figure 6.3.3: From effective to delivered power curve (example) 59
Figure 6.3.4: Effect of change in resistance on delivered power curve (example) 60
Figure 6.3.5: Effect of different propeller pitches on delivered power (example) 61
Figure 6.4.1: Change in delivered power due to weather, draught and fouling 65
Figure 6.4.2: Diesel engine failure in a two shaft arrangement 66
Figure 6.4.3: Bollard pull 68
Figure 6.4.4: Bollard pull: Effect on ship speed 69
Figure 6.4.5: Choosing a design point for a fixed pitch propeller 70
Figure 6.4.6: CPP characteristic in a typical diesel engine performance diagram 72
Figure 6.4.7: Controllable pitch propeller design point 73
Figure 6.4.8: Example: Combinator diagram (position of operation lever) 74
Figure 6.4.9: Example: Combinator (position in propeller diagram) 75
Figure 6.4.10: Example: Constant speed generator in operation with CPP 76
-
7/25/2019 Technica Product Line
14/236
III LIST OF FIGURES12 |
Figure Title Page
Figure 6.4.11: Example: Single shaft operation with CPP 77Figure 6.5.1: Waterjet 78
Figure 6.5.2: Waterjet design point 79
Figure 6.5.3: Platform with pump 80
Figure 6.5.4: Waterjet performance diagram 81
Figure 6.5.5: Waterjet operation with two diesel engines 83
Figure 6.5.6: Estimating the size of a waterjet (inlet duct diameter) 83
Figure 6.5.7: Estimating the design impeller speed of a waterjet 84
Figure 6.6.1: Examples of operating profiles (freighter, fast ferry, OPV) 87
Figure 6.6.2: Examples of operating profiles (freighter, fast ferry, OPV) 88
Figure 6.6.3: Example: Owner defined operating profile for a ship 89
Figure 6.6.4: Example: Owner defined operating profile for a diesel engine 89
Figure 6.6.5: Example: 1DS diesel engine rating 90
Figure 6.7.1: Definition: Electrical power generation 102
Figure 7.1.1: Gearbox arrangements 103
Figure 7.1.2: Engine room arrangement, minimum distances 105
Figure 7.1.3: Flange-mounted gearbox 106
Figure 7.1.4: Free-standing gearbox 107
Figure 7.1.5: Free-standing gearbox and universal shaft, V drive arrangement 108
Figure 7.3.1: Free-standing generator 111
Figure 7.3.2: Flange-mounted generator 112
Figure 7.4.1: Examples showing how hoses are installed 114
Figure 7.4.2: Examples showing how hoses are installed 115
Figure 7.4.3: Relationship between nominal diameters and thread sizes 116
Figure 7.4.4: Diagrammatic view of a hose connection 116
Figure 7.4.5: Relationship between nominal diameters and pipe outside diameters 117
Figure 7.4.6: Connection of rubber bellows, diagrammatic view 117
Figure 7.4.7: Combustion air intake from engine room 120
Figure 7.4.8: Combustion air intake directly from outside 121
Figure 7.4.9: Typical exhaust gas outlets 125
Figure 7.4.10: Standard exhaust gas system via funnel 128
-
7/25/2019 Technica Product Line
15/236
III LIST OF FIGURES | 13
Figure Title Page
Figure 7.4.11: Underwater discharge (with exhaust flap) 129Figure 7.4.12: Specific mean coefficient of thermal expansion 131
Figure 7.4.13: Graph for determining longitudinal thermal expansion of exhaust pipes 131
Figure 7.4.14: Exhaust discharge system, underwater exhaust outlet, deflector 132
Figure 7.4.15: Exhaust system with water injection/spray-ring 134
Figure 7.4.16: Exhaust system design with water injection 135
Figure 7.4.17: Coolant system, functional diagram 136
Figure 7.4.18: Cooling water system with on-engine mounted heat exchanger 137
Figure 7.4.19: Cooling water system with separately-mounted heat exchanger 138
Figure 7.4.20: Central cooling water system 139
Figure 7.4.21: Sea chest construction for ice ships 140
Figure 7.4.22: FCS Selection Tool (input screen) 144
Figure 7.4.23: On-board fuel system (typical) 146
Figure 7.4.24: Evaluation value for max. fuel inlet temperature 148
Figure 7.4.25: Lube oil system 150
Figure 7.4.26: Starting system with pneumatic starter motor 155
Figure 7.4.27: Electric power supply 158
Figure 7.5.1: Limitation of NOx-emission (IMO) 159
Figure 7.5.2: Diesel engine noise sources 161
Figure 7.5.3: Example, diesel engine with sound enclosure 162
Figure 7.5.4: Diesel engine surface noise analysis (example) 163
Figure 7.5.5: Undamped exhaust gas noise analysis (example) 164
Figure 7.5.6: Single resilient mounting system with shock 167
Figure 7.5.7: Double resilient mounting system for extreme acoustic requirements 169
Figure 7.5.8: Examples for different Quiet Systems 170
Figure 7.5.9: Structure borne noise: diesel engine feet, above rubber mounts 171
Figure 7.6.1: Diesel engine direct drive 172
Figure 7.6.2: Combined diesel engine and diesel engine 173
Figure 7.6.3: Combined diesel engine and diesel engine with separate gear compartment 174
Figure 7.6.4: Combined diesel engine or gas turbine 175
Figure 7.6.5: Combined diesel engine and gas turbine 176
-
7/25/2019 Technica Product Line
16/236
III LIST OF FIGURES14 |
Figure Title Page
Figure 7.7.1: Non reverse reduction gear 178Figure 7.7.2: Non reverse reduction gear with reverse shaft, or reversing reduction gear 178
Figure 7.7.3: Power take-off (PTO) or power take-in (PTI), gear driven 179
Figure 7.7.4: Top mounted PTO with 1 output 179
Figure 7.7.5: Top mounted PTO with 2 outputs 179
Figure 7.7.6: Direct drive free-standing gearbox arrangement with free end PTO 180
Figure 7.8.1: Example for mass elastic system 182
Figure 8.3.1: Test instruction, page 1 193
Figure 8.3.2: Test instruction, page 2 194
Figure 8.3.3: Test instruction, page 3 195
Figure 8.3.4: Diesel engine inspection report 196
Figure 8.3.5: Gearbox inspections report, page 1 197
Figure 8.3.6: Gearbox inspections report, page 2 198
Figure 9.1.1: Engine Control and Monitoring System (ADEC) 201
Figure 10.1.1: Automation Matrix 203
Figure 10.1.2: Typical configuration smartline 204
Figure 10.1.3: Visualization example for Colour Graphic Display 6.5 205
Figure 10.1.4: Typical configuration blueline 206
Figure 10.1.5: Visualization example for Colour Graphic Display 5,7 (blueline) 207
Figure 10.1.6: Typical configuration (bluevision - non classified) 209
Figure 10.1.7: Typical configuration (bluevision classified) 209
Figure 10.1.8: Visualization example for TFT Colour screen 19 210
Figure 10.2.1: Typical configuration (maritune) 212
Figure 10.2.2: Principle function of maritune 213
Figure 10.3.1: Typical Configuration (IMCS) 214
Figure 10.3.2: Visualization example for TFT Colour screen 19 215
Figure 11.3.1: Maintenance Schedule Matrix Series 4000 Application Group 1A 219
Figure 11.3.2: Example task list 221
Figure 12.1.1: Lifting rig 223
-
7/25/2019 Technica Product Line
17/236
1 GENERAL | 15
1.1 Designations
The DIN 6265 respectively ISO 1204 designations are used to identify the sides
and cylinders of diesel engines. Details are explained in Figure 1.1.1.
Figure 1.1.1: Diesel engine designations (sides, cylinders, direction of rotation)
> Driving end (flywheel) = KS (Kupplungsseite)
> Free end = KGS (Kupplungsgegenseite)
> Left-bank cylinders = A1, A2, A3, ..., A9, A10
> Right-bank cylinders = B1, B2, B3, ..., B9, B10
> Direction of rotation = looking at the driving end (KS)
-
7/25/2019 Technica Product Line
18/236
2 DEFINITION OF APPLICATION GROUPS16 |
2.1 General Notes
In addition to general application by usage, e.g. marine vessel, the particular application must
be taken into account for selecting the correct diesel engine.
The choice of the application group determines the maximum possible diesel engine power and
the anticipated time between major overhauls (TBO). Load varies during operation, with the
result that the TBO is dependent on the actual load profile and varies from different applica-
tions.
For an optimum selection of the diesel engine taking into account the maximum power availa-
ble the following information should be obtained from the operator:
> Application, e.g. yacht, patrol boat, ferry, fishing vessel, freighter etc.
> Load profile (diesel engine power versus operating time)
> Anticipated operating hours per year
> Preferred time between overhauls (TBO, for special cases only)
The terms load profile and TBO and the relationship between them are explained in detail
in chapter:
3 Specification of Power and Reference Condition
11 Maintenance Concept / Maintenance Schedule
If no specific load profile information is available from the operator, the selection of the diesel
engine is performed on the basis of the standard load profile determined by MTU by means of
typical application. The MTU Sales Program distinguishes for the marine application propulsion
diesel engines and marine auxiliary diesel engines and diesel engines for the on-board supply of
electricity. The following application groups are subdivided into in detail.
-
7/25/2019 Technica Product Line
19/236
2 DEFINITION OF APPLICATION GROUPS | 17
2.2 Marine Main Propulsion and Auxiliary Propulsion Plants
1A Diesel engines for vessels with unrestricted continuous operation
Average load: 70 90 % of rated power
Annual usage: unlimited
Examples: work boats, ferries, fishing vessels, tugs, barges, sailing - and
displacement yachts
1B Diesel engines for fast vessels with high load factors
Average load: 60 to 80 % of rated power
Annual usage: up to 5000 hours (as a guideline)
Examples: fast ferries (monohulls, hydrofoils, catamarans and surface-effect
ships), crew boats, patrol boats and yachts
1DS Diesel engines for fast vessels with low load factors
Average load: Less than 60 % of rated power
Annual usage: Up to 3000 hours (as a guideline)
(Series 2000 & lower power diesel engines approx. 1000 hours)
Examples: fast patrol boats, police craft, fast yachts, corvettes and frigates
Significant deviations from the above application groups should be discussed with the responsi-
ble application engineering group.
-
7/25/2019 Technica Product Line
20/236
2 DEFINITION OF APPLICATION GROUPS18 |
2.3 On-Board Electric Power Generation/Auxiliary Power
3A Electric power generation, continuous power
Average load : 100% of rated power
Annual usage : unrestricted
(see Load Profile Figure 3.6.1)
Examples : power generation, diesel-hydraulic drive,
drive for fire fighting pumps
3B Electric power generation, prime power with variable load
Average load : 100% of rated power, variable load
Annual usage : unrestricted
(see Load Profile Figure 3.6.1)
Examples : power generation, diesel-hydraulic drive,
drive for fire fighting pumps
Annotation: Both groups (3A, 3B) are suitable for diesel electric drives.
-
7/25/2019 Technica Product Line
21/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION | 19
3.1 Definition of Terms
The available power for a specific diesel engine type and application group is listed in the Sales
Program.
The rated power of marine main propulsion diesel engines of application group 1A, 1B and 1DS
is stated as ISO standard fuel-stop power, ICFN, in accordance with DIN ISO 3046. Measure-
ment unit is kW.
I = ISO power
C = Continuous power
F = Fuel stop powerN = Net brake power
The fuel-stop power rating represents the power that a diesel engine can produce unlimited
during a period of time appropriate to the application, while operating at an associated speed
and under defined ambient conditions (reference conditions), assuming performance of the
maintenance as specified in the manufacturers maintenance schedule.
Power specifications always express net brake power, i.e. power required for on-engine
auxiliaries such as engine oil pump, coolant pump and raw water pump is already deducted.
The figure therefore expresses the power available at the diesel engine output flange.
The diesel engines of application group 1A and 1B can demonstrate 10 % overload in excess of
rated fuel-stop power for the purposes of performance approval by classification societies.
Some classification societies accept the certification of diesel engines of application group 1DS
for special service vessels with specific load profiles. In case of such a request, the respective
application engineering group should be contacted.
Before delivery, all diesel engines will be factory tested on the dynamometer at standard ISO
reference conditions (intake air and raw water temperature 25C).
Acceptance test procedures at MTU:
> MTU factory acceptance test
> Acceptance test in accordance with classification society regulations under supervision of
the customer
As a rule, marine main propulsion diesel engines are supplied with power limited to fuel-stop
power as specified in the Sales Program.
3.1.1 ISO Standard Fuel-Stop Power (ICFN)
-
7/25/2019 Technica Product Line
22/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION20 |
3.1.2 ISO Standard Power Exceedable by 10 % (ICXN)
The rated power of marine onboard power generation of application group 3A and 3B is
stated as ISO standard power exceedable by 10 %, ICXN, in accordance with DIN ISO 3046.
Measurement unit is kW.
I = ISO power
C = Continuous power
X = Service standard power, exceedable by 10 %
N = Net brake power
3.2 Reference Conditions
The reference conditions define all ambient factors of relevance for determining diesel engine
power. The reference conditions are specified in the Sales Program and in the applicable diesel
engine performance diagram.
ISO 3046-1 standard reference conditions:
Total barometric pressure: 1000 mbar or (hPa)
Air temperature: 25 C (298 K)
Relative humidity: 30 %
Raw water temperature: 25 C (298 K)
For conditions differing from the standard reference:
Air temperature: 45 C
Raw water temperature: 32 C
The available brake power and the correction for the fuel consumption will be specified in the
Sales Program or the applicable diesel engine performance diagram.
Power reduction and correction in fuel consumption for reference conditions above:
Air temperature: > 45 C
Raw water temperature: > 32 C
Use the procedures according to ISO 3046.
-
7/25/2019 Technica Product Line
23/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION | 21
3.3 Intake and Exhaust Pressure Loss
3.3.1 General
Due to the effect on diesel engine performance, careful design considerations must be given
to minimize pressure loss in intake and exhaust ducting. The design target is to avoid power
reduction by unnecessary pressure losses. Therefore the duct should be as straight and as
short as the installation will permit and bends and contractions should be minimized.
Materials and finishes should be chosen to ensure that corrosion or deterioration will not result
in release of particles that could cause foreign object damage to the diesel engine.
Due to friction between the inlet air/exhaust gas and the pipework a pressure loss will occur on
the way between the diesel engine and the inlet air intake/exhaust exit. The main reasons for the
pressure loss are:
> friction between the air/gas and the ducting
> obstacles in the flow path (e.g. meshes, screens, filter, silencer)
> discontinuities in the flow path (e.g. sharp transitions between different duct diameters)
Generally the pressure loss can be defined as the difference in total pressure between the
ambient pressure (P0) and the total pressure at the plain diesel engine air inlet or the total
pressure at the plain diesel engine exhaust exit and the total pressure at the exhaust duct exit.
The reference values for the permissible intake pressure loss (MTU: intake air depression) for
the series 2000/4000 are (see performance diagram for latest information):
Pintake = 15 mbar (series 2000 and series 4000 M73 through M93L)
= 1500 Pa
Pintake = 25 mbar (series 4000 M40 through M90)
= 2500 Pa
The reference values for the permissible exhaust pressure loss (MTU: exhaust back pressure)
for the series 2000/4000 are (see performance diagram for latest information):
Pexhaust = 30 mbar (series 2000/4000)
= 3000 Pa
If the reference values are exceeded, contact the Regional Sales Manager or MTU Sales
Application Engineering for advice.
-
7/25/2019 Technica Product Line
24/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION22 |
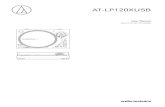
3.4 Inclination
The selection, layout and arrangement of all shipboard machinery, equipment and appliances
shall be such as to ensure faultless continuous operation under the inclination conditions
(e. g. GL rules) specified in Figure 3.4.1.
Installations, Angle of inclination in ()2
Components Athwartship For-and-aft
static dynamic static dynamic
Main and auxiliary machinery 15 22.5 5 7.5
Ships safety equipment, e.g.
emergency power installations,
emergency fire pumps and
their drives 22.53 22.53 10 10
Switchgear, electrical and
electronic appliances1 and
remote-control systems
1
Up to an angle of inclination of 45 no undesired switching operations or functional changes may occur.2 Athwartships and for-and-aft inclinations may occur simultaneously.
3 On ships for the carriage of liquefied gases and chemicals the emergency power supply must also remain operational
with the ship flooded to a final athwartships inclination up to a maximum of 30.
Figure 3.4.1: Inclination
Note:
The actual permissible figures of the MTU-engines are defined in the technical data sheets.
-
7/25/2019 Technica Product Line
25/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION | 23
3.4.1 Installation Inclination of the propulsion plant
It is important not to exceed the maximum permissible operating angle of inclination specified
for the components (engine, gearbox), in order not to endanger the operability of the propulsion
plant. The maximum permissible operating angles of inclination for engine and gearbox are
specified in the project or contract data sheet. Wind and waves impart certain movements to
the vessel (rotation about the transverse, longitudinal and vertical axes), and the result changes
in the vessels attitude must be taken into account when the installation inclination of the
propulsion plant is calculated. The movements described by the vessel are defined in Fig.3.4.2.
Note that as a rule, only the changes in longitudinal and transverse inclination are of
significance in this respect.
Figure 3.4.2: Movements described about its axes by a vessel when afloat
Pitch + trim = Rotation about transverse axis 'Y'
Roll + heel = Rotation about longitudinal axis 'X'
Yaw = Rotation about vertical axis 'Z'
The relationships between the inclinations that must be taken into account in determining the
maximum permissible installation inclination of engine and gearbox are shown in Fig.3.4.3 and
defined in equation 3.4.1.
-
7/25/2019 Technica Product Line
26/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION24 |
Figure 3.4.3: Operating angle of inclination shown in diagrammatic form
3.4.1.1 Permissible installation inclination in longitudinal direction
= max. permissible installation inclination with horizon as a datum line
1 = max. permissible operating inclination with horizon as a datum line
2 = max. trim during operation
3 = max. periodic pitching during operation
=1 - 2 - 3 in angular degrees Equation 3.4.1
3.4.1.2 Permissible installation inclination in transverse direction
Equation 3.5.1 applies by anology for calculating the maximum permissible installation inclina-
tion in the transverse direction. The actual values for heel and roll, both movements above the
longitudinal axis, must of course be inserted instead of the values for movement about the
transverse axis. In our experience, however, it is only very rarely that the need arises to install
an engine inclined off the vertical in the transverse direction.
General Note:
In calculating the max. applicable operating inclination, it is essential to take the recurring
periodic pitching and/or rolling movements into account. This is because these movements
are induced by the action of wind and wave, and as such they may be encountered as factors
applying during continuous operation. Consequently, the permissible operating inclination for
the propulsion plant must be that calculated for continuous operation.
-
7/25/2019 Technica Product Line
27/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION | 25
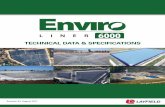
3.5 Load Profile
The load profile is a projection of the diesel engine operating routine. The following standard
load profiles (Figures 3.5.1, 3.5.2 and 3.5.3) have been established in the past, based on accu-
mulated field experience with specific vessels and a huge number of recorded load profiles.
If there is a significant difference between the actual and standard load profiles, MTU
calculates the TBO on the basis of the load profile submitted by the customer.
All MTU diesel engines can be operated at fuel-stop power as long as required by the customer.
Of course, extensive operation at fuel stop power (higher load profile) may shorten the time
between overhauls (TBO).
Further information about load profiles see chapter 3.
For example: 4000 M60/M61
BrakePowerin(%)
Time in (%) Operating Time
100
80
60
40
20
00 20 40 60 80 100
1 A Standard Load Profile
Brake Power Time Period
(%) (%)
< 15 20
60 20
80 50100 10
Brake
Powerin(%)
Time in (%) Operating Time
100
80
60
40
20
00 20 40 60 80 100
1 A (4000 M60R only) Standard Load Profile
(4000 M60R/M61R only)
Brake Power Time Period
(%) (%)
< 15 10
90 70
100 20
Application
Group 1A
Application
Group 1A
Figure 3.5.1: Standard Load Profiles 1A
-
7/25/2019 Technica Product Line
28/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION26 |
BrakePowerin(%)
Time in (%) Operating Time
100
80
60
40
20
00 20 40 60 80 100
1 BStandard Load Profile
Brake Power Time Period
(%) (%)
< 15 25
100 75
BrakePowerin(%)
Time in (%) Operating Time
100
80
60
40
20
00 20 40 60 80 100
1 DSStandard Load Profile
Brake Power Time Period
(%) (%)
< 10 20
70 70
100 10
Application
Group 1B
for example
4000 M70
Application
Group 1DS
Figure 3.5.2: Standard Load Profiles 1B and 1DS
-
7/25/2019 Technica Product Line
29/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION | 27
BrakePowerin(%)
Time in (%) Operating Time
100
80
60
40
20
00 20 40 60 80 100
3 A Standard Load Profile
Brake Power Time Period
(%) (%)
< 10 15
50 80
100 5
BrakePowerin(%)
Time in (%) Operating Time
110100
80
60
40
20
00 20 40 60 80 100
3 B Standard Load Profile
Brake Power Time Period
(%) (%)
< 15 15
70 60
100 20
110 5
Figure 3.5.3: Standard Load Profiles 3A and 3B
Application
Group 3A
Application
Group 3B
-
7/25/2019 Technica Product Line
30/236
3 SPECIFICATION OF POWER AND REFERENCE CONDITION28 |
3.6 Time Between Major Overhauls (TBO)
Up to now, the TBO for diesel engines is not specified in any international standard.
Therefore each diesel engine manufacturer uses its own definition for TBO.
According to MTU, the TBO is defined to be the time span in which operation without major
failure is ensured, i.e. it precludes wear-related damage requiring a major overhaul or diesel
engine replacement.
This time span is theoretically reached, if a probability of wear-out failures exceeds 1%
(so-called B1 definition). This means that an MTU diesel engine can still provide full and
unlimited service until the last operating hour before the scheduled overhaul.
The major criterion for a ship is availability and thus the reliability of the propulsion. Based on
this, MTU decided to limit the statistical wear-out failure rate to 1 % only.
TBO definition from other diesel engine manufacturers
In contrast to MTUs TBO definition, some other manufacturers define a scheduled TBO at a
wear-out failure rate of 10% or up to 50% (B10 or B50 definition). This means that statistically
up to 50% of all diesel engines do not reach the pre-defined TBO without major failure.
Load Profile Recorder
Most diesel engines in the MTU Sales Program do include a load profile recorder as an integral
part of the Electronic Engine Management System. This device continuously records the
operating time spent at certain power levels and speeds, together with several other important
diesel engine parameters. The load profile data can be downloaded from the Electronic
Engine Management System through autorized personnel and analyzed. In case of significant
deviations between the recorded load profile and the assumed load profile, the TBO can be
revised. The finally applicable TBO will also take into account the actual diesel engine condition
as a result of installation conditions, quality of fluids and lubricants and service.
Failurerate
TBO MTUMaintenance Echelon W6
Operating time
Early failures1 Random failures Wearout failures
1 Probable start-up failures
Figure 3.6.1: TBO definition of MTU
-
7/25/2019 Technica Product Line
31/236
4 FLUIDS AND LUBRICANTS SPECIFICATION | 29
4.1 General Notes
The fluids and lubricants used in a diesel engine are among the factors influencing serviceabili-
ty, reliability and general operability of the propulsion plant.
Only fluids and lubricants approved by MTU may be used with MTU products. MTU issues a list
of approved fluids and lubricants, for diesel engine operation and diesel engine preservation i.e.
> lubricants (oils, greases and special-purpose lubricant substances)
> coolants (corrosion-inhibiting agents, anti-freeze agents)
> fuels
> preserving agents (corrosion-inhibiting oils for use in and on the diesel engine)
The MTU approved fluids and lubricants as well as the requirements to be satisfied are listed in
the currently applicable MTU Fluids and Lubricants Specification (A001061/Revision No.).
An operator wishing to use a fluid or lubricant that is not included in the Fluids and Lubricants
Specification must consult MTU.
The specific fuel consumption (sfc) as given in performance maps or technical data sheets does
not consider the use of anti-freeze. The sfc may slightly increase with the use of anti-freeze.
4.2 Approved Fuel for MTU Engines
4.2.1 Requirements
The quality of the fuel is very important for satisfactory diesel engine performance, long diesel
engine service life and acceptable emission levels. Commercially available diesel fluids meeting
the following specifications are approved for use:
Diesel Fuels
> Diesel Fuel as per EN 590
> Grade No. 1-D as per ASTM D 975-06
> Grade No. 2-D as per ASTM D 975-06
Marine Distillate Fuels
> DMX as per ISO 8217
The following can be used if the oil quality and service-life limitations are taken into consideration:
> DMA as per ISO 8217 (Project specific only)
> Other qualities available upon request
-
7/25/2019 Technica Product Line
32/236
4 FLUIDS AND LUBRICANTS SPECIFICATION30 |
4.2.2 Low Sulphur Diesel Fuels
Sulphur is contained in chemically bound form in crude oil and therefore in fuel at varying
levels. MTU designates diesel fuels with a sulphur content of maximum 10 ppm as sulphur
free. Low sulphur diesel fuels are recommended for environmental reasons. In order to avoidwear problems, lubricity additives are also added.
4.2.3 Diesel Fuels in Winter Operation
At low outdoor temperature, the diesel fuels flow properties can be unacceptable on account
of paraffin precipitation. In order to prevent operational problems (e.g. clogged filters) during
such periods, diesel fuels with suitable cold-flow characteristic should be used. If not available
additives can be added. See the information in the specific operation manual.
4.2.4 Fuel Properties for Calculation Routines
A fuel is a chemical compound with varying properties. Instead of specific ranges, values will be
given for some properties only. But for comparable calculations fixed values have to be used.
Mainly two values will be needed in the calculations.
1 Fuel density
2 Lower Caloric Value (alias Lower Heating Value)
Therefore the following definitions have been done in order to produce comparable calculations.
Fuel Density:
The fuel density will be needed e.g. to convert mass flow to volume flow and to estimate the
tank capacity of the ship. The fuel density depends on the ambient temperature and shall be
referenced to 15C.
Fuel density = 830 kg/m3 for calculations only
Lower Caloric Value:
In the diesel engine performance diagram (see chapter 5) the lines of constant specific fuel
consumption depend on a given Lower Caloric Value. If a comparison has to be made between
different fuels or with other diesel engine performance diagrams the Lower Caloric Value of the
reference fuel has to be known.
Lower Caloric Value = 42800 kJ/kg for calculations only
4.3 Use of alternative fuels in MTU-engines
Please contact MTU-Application-Center
-
7/25/2019 Technica Product Line
33/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM | 31
5.1 General Notes
The diesel engine performance diagram serves as the basis for a number of calculations, but
one of its most important functions is to indicate the speed (n) and brake power (PB) limits that
must be observed, e.g. in different naval applications.
Figure 5.1.1: Structure diesel engine performance diagram
Figure 5.1.1 shows the scheme of a typical
diesel engine performance diagram with its
designations. The diagram can be separated
in the
> operating envelope,
> operating area,
> propeller curve, and
> adaptation on the application.
UMBL: The abbreviation UMBL stands for the
German word umblasen and describes a
method of optimizing the turbocharging (see
also paragraph operating area). This feature
is implemented in the Series 4000, i.e. in
diesel engines with sequential turbocharging
only.
BrakePowerinkW
Diesel Engine Speed in rpm
Theoretical propeller curve (P~n3)
Rated speed
(100%)
Acceleration reserve
Maximum ContinuousRating (MCR) limit line
Turbocharger
switching border line
Constant specific fuelconsumption
Rated power (100 %) = Fuel stop power
Lugging point
Lug down range
Minimums
peed(lowidle)
1
2
3
-
7/25/2019 Technica Product Line
34/236
Remark
The operating area of the diesel engine is limited by
the Maximum Continuous Rating (MCR) limit curve or
DBR limitation curve for temporary operation i.e. acceleration only
(not applicable for all engine models)
On the left side the limit will be built by the Minimum Speed (n), the
lowest self contained speed of the diesel engine. This speed should
not be mixed up with the minimum clutch engaging speed which will
be somewhat higher.
The line between the Minimum Speed and Lugging Point shows
the operational limits determined by thermal, mechanical and/or
combustion related issues.
The upper side will be built by the Fuel Stop Power or Rated Power
(100% brake power). Dependent on the application and the chosen
TBO the maximum available power output of the diesel engine will be
limited. The speed range where the Fuel Stop Power is in effect will
be called Lug-Down Range. The leftmost point of the Lug-Down Range
is the Lugging Point. Below this speed the Rated Power is no more
available.
Sometimes this type of rating where the possible available output
power is limited by the diesel engine controller is called Flat Rating.
The right side limit will be built by the Rated Speed (100%) of the
diesel engine.
Operating envelope:
5 DIESEL ENGINE PERFORMANCE DIAGRAM32 |
Envelope
-
7/25/2019 Technica Product Line
35/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM | 33
Operating area:
The operating area is divided into several areas, dependent on the operational behaviour of the
turbochargers. In the case of sequential turbocharging the status of the turbocharger is shown.
I, II: Status, sequential turbochargingII UMBL: The diesel engine operating values can be further optimized by employment of
some blowing over facilities within the exhaust turbocharger connection. After
connection of the second turbocharger, charged air is passed over to the exhaust
line controlled by the diesel engine electronics in order to increase the mass
flow rate through the turbine. In combination with the improved situation of the
working line with reference to the compressor efficiency a higher loading-pressure
and consequently an improvement of the diesel engine operating values is
obtained.
The areas are seperated by the Turbocharger Switching Borderlines where the diesel engine
controller switches from one status to another. This switching will not take place at a fixed
power-speed relation but in a certain speed range to avoid permanent switching if the diesel
engine operates near the borderline. This results in a specific behaviour of the diesel engine. If
the diesel engine will be run on a load curve from Rated Power to idle or vice versa the load
points will be slightly different (hysteresis). Normal operation will not be affected but in the
specification of an acceptance test this behaviour should be taken into consideration.
Continuous operation at the turbocharger switching line should be avoided.
Propeller curve:
In Fig. 5.1.1 a simple theoretical propeller curve is shown with its design point at Rated Power
(100% PB) and Rated Speed (100% n). The difference between the propeller curve and MCR
curve is called Acceleration Reserve. This reserve can be used during dynamic operations.
The propeller curve in the diesel engine performance diagram shows only the stationary
situation, where all forces are balanced. In this case the diesel engine moves only on the
propeller curve and all the other points in the operating area are out of reach because there is
no power-speed relation possible.
In a non stationary case this situation changes visibly. Starting at a stationary point the diesel
engine tries to accelerate. The speed of the diesel engine increases and so does the propeller.
But the relation between propeller speed (n) and ship speed (v) are not in balance any more.
-
7/25/2019 Technica Product Line
36/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM34 |
The propeller tries to rotate too fast for the given ship speed and it absorbs more power than
in a balanced situation. For the diesel engine the rise of the propeller curve tends to increase.
In this situation the power output of the diesel engine at a certain speed (n) can be higher
than the stationary propeller curve demands.If the acceleration is too fast the MCR curve will act as limiter.
Generally big acceleration reserves allow fast manoeuvring if gearbox and shaft line are to be
designed for this application.
Adaptation on application:
Every diagram is given in a specified context and should not used separately. Basis for the
shown Rated Power and the specific fuel consumption in the performance diagram are the
> Application group (1A, 1B, 1DS, 3A, 3B)
> Reference conditions
> Time between overhauls (TBO) with the belonging operating load profile
If the application does not match with the reference conditions the correction factors for output
power and specific fuel consumption are also given. Figure 5.1.2 shows such a representative
diesel engine performance diagram.
Additionally a change in TBO, due to the operating load profile, will be specified in a
Contract Specific Addition to the performance diagram (Figure 5.1.3).
Remark:
The series 2000 has an additional speed margin of 50 rpm.
-
7/25/2019 Technica Product Line
37/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM | 35
Figure 5.1.2: Diesel engine performance diagram
-
7/25/2019 Technica Product Line
38/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM36 |
Figure 5.1.3: Load profile and TBO: Contract specific addition
-
7/25/2019 Technica Product Line
39/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM | 37
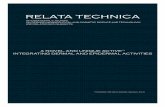
5.2 Load Curves
The main application of a diesel engine in a marine context is propulsion. Most of the ships
have individual hull forms. Nevertheless they can be sorted into groups with characteristic
propeller curves. The basis will be formed by a monohull as a typical displacement vessel
(Figure 5.2.1).
There is only a small difference between individual and theoretical propeller curves (Figure
5.1.1).
In Figure 5.2.2 the speed range of the vessel has been increased and the individual propeller
curve starts to build a hump. The ship moves from plain displacement into planing.
The theoretical curve without planing is added in order to show that the resistance of the
ship decreases considerably when planing occurs. The difference between individual and
theoretical propeller curves is obvious.
Planing depends on a lot of factors like ship size and speed and will be mainly influenced by
the hull form. A ship designed for planing will move earlier into this state than other ships.
Therefore it is not clear how the ship will behave if its particular design is not known.
Figure 5.2.1: Monohull (displacement vessel without planing)
rated power (100%)
theoretical propeller curve
(P~n3)
monohull (without planing)
BrakePowerin(%)
Diesel Engine Speed in (%)
ratedspeed(100%)
-
7/25/2019 Technica Product Line
40/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM38 |
There are some hull forms like catamarans or trimarans that will generally have no planing
phase due to their high draught and small planing area. Their hump is the result of the
interaction of waves between the hulls.
Figure 5.2.3: Catamaran (multihull, never planing)
Figure 5.2.2: Monohull (displacement vessel with planing)
rated power (100%)
theoretical propeller curve without
planing (for comparison)
monohull (with planing)
BrakePowerin(%)
Diesel Engine Speed in (%)
ratedspeed(100%)
theoretical propeller curve(P~n
3)
rated power (100%)
catamaran
BrakePowerin(%)
Diesel Engine Speed in (%)
ratedspeed(100%)
theoretical propeller curve(P~n
3)
-
7/25/2019 Technica Product Line
41/236
5 DIESEL ENGINE PERFORMANCE DIAGRAM | 39
If only the design point of a ship is known the quality of an approximation with a theoretical
propeller curve can be good or bad dependent on the influences shown and should always be
looked at with care.
Figure 5.2.4 shows what can happen when a propeller curve with hump and a diesel engineperformance diagram will be merged. It must be checked if the propeller curve is inside the
MCR limits with sufficient distance to these limits (dynamic behaviour). Also shown is the
theoretical propeller curve as a basis to get an impression how different types of ships and
their operational states can deviate.
In such cases the diesel engine manufacturer (MTU) should always be consulted. In the worst
case when a short overload is not practical a two stage gearbox must be used.
Figure 5.2.4: Propeller curves with hump in performance diagram
BrakePowerPB
in(%)
perShip
Diesel Engine Speed in (%)
20 40 60 80 100
theoretical propeller curve (P~
n3)
Ratedspeed(100%)
e.g. catamaran
MCR curve
e.g. ship with planing
Examples
Rated power (100%)100
80
60
40
20
0
-
7/25/2019 Technica Product Line
42/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION40 |
6.1 Propulsor
6.1.1 Abbreviations
The following abbreviations will be used in section 6. In the majority (marked with an asterisk)
they are according to recommendations of the ITTC Symbols and Terminology List, Draft
Version1999 (International Towing Tank Conference).
Figure 6.1.1: Scheme of a propulsive unit (side view)
Symbol Name Definition or Explanation SI Unit
ITTC
B Fuel consumption Within MTU: kg/h m3/h
kg/h
D * Propeller diameter m
Hu Lower heating value or Lower heating value of fuel
lower caloric value (preferred value 42800 kJ/kg) KJ/kg
PB * Brake power Power at output flange of the
diesel engine, power delivered
by prime mover. W
PD * Delivered power or Power at propeller flange.
propeller power, propeller
load W
PE * Effective power or Power for towing a ship.resistance power W
PS * Shaft power Power measured on the shaft.
Power available at the output flange
of a gearbox. If no gearbox fitted:
PS = PB W
PS Generator apparent power W
Pp Generator active power W
RT * Total resistance Total resistance of a towed ship. N
T * Propeller thrust or
waterjet thrust N
(Propeller flange means a location (see PD) after the last bearing and before the propeller.)
-
7/25/2019 Technica Product Line
43/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 41
Symbol Name Definition or Explanation SI Unit
be Specific fuel consumption within MTU often used as SFC kg/kWh
(MTU dimension g/kWh) (g/kWh)
f Electrical power supply
frequency Hz
n Shaft speed, rate of (diesel engine, gearbox, propulsor)
revolution alias rpm in several propulsor 1/s
applications (1/60s = rpm = 1/min) (rpm)
p Number of generator
pole pairs
v Ship speed (see remark 1) m/s
(knot)
D * Propulsive efficiency PE / PD
Gen Generator efficiency
H * Hull efficiency
m Mechanical efficiency PD / PB , represents the losses betw.
diesel engine and propeller flange
0 * Propeller open water
efficiency
R * Relative rotative efficiency
fuel
Specific density of fuel (preferred value 830 kg/m3) kg/m3
Remark 1:
While the SI-Unit of velocity is meter/second the traditional unit knots is widely used and this
situation will not change in the near future.
kn knot (1 sm/h or 1852 m/3600 s = 0.5144 m/s)
sm sea mile ( =1852 m) (alias nm = nautical mile)
-
7/25/2019 Technica Product Line
44/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION42 |
Ease of manufacture
Small hub size
Blade root dictates boss length
Design for single condition (design point)
Absorbed power varies with propeller speedNo restriction on blade area or shape
Gearbox: reverse reduction gear needed
Constant or variable speed operation
Blade root is restricted by palm dimensions
Mechanical complexity
Restriction on blade area to maintain reversibility
Can accommodate multiple operating conditions
Increased manoeuvrability
Gearbox: a fully reversible CPP needs only a non reversing
reduction gear
Good directional control of thrust
Increased mechanical complexity
Avoids need for separate rudder
Increased manoeuvrability
Diesel engine load independent of wind and sea state
High speed range (approx. > 20 kn)
Gearbox: non reversing gear needed. Sometimes a reversing
gear is used to allow back flushing of water (reverse mode)
Type General characteristics
Fixed Pitch Propeller (FPP)
Controllable Pitch Propeller
(CPP)
Waterjet
6.1.2 Propulsive Devices (Overview)
The duty of a propulsive unit is to convert the power of the diesel engine into propulsive thrust.
Note: For further information on Propulsive Devices we also refer to the typical drive arrange-
ments specified in the TUG APPLICATION GUIDE
6.1.2.1 General characteristics
-
7/25/2019 Technica Product Line
45/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 43
Rudderpropeller
Cycloidal Propeller
(Voith-Schneider Propeller)
Twin-Propeller
Podded Propulsion
Good directional control of thrust
Increased mechanical complexity
Avoids need for rudder
Increased manoeuvrability
Can employ ducted or non ducted FPP or CPP types
Low speed range (approx. < 20 kn)
Gearbox: integrated in propeller drive unit
Good directional control of thrust
Increased mechanical complexityAvoids need for rudder
Increased manoeuvrability
Low speed range (approx. < 20 kn)
Gearbox: integrated in propeller drive unit, adaptation may
be required
Good directional control of thrust
Increased mechanical complexity
Avoids need for rudder
Increased manoeuvrability
Propeller coupled mechanically
Same direction of rotation
Low speed range (approx. < 24 kn)
Gearbox: integrated in propeller drive unit
Good directional control of thrust
Avoids need for rudder
Increased manoeuvrability
Electric motor drives propeller
Gearbox: not required
General characteristics Type
-
7/25/2019 Technica Product Line
46/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION44 |
Fixed Pitch Propeller (FPP)
Controllable Pitch Propeller(CPP)
Waterjet
Rudderpropeller
Type Typical arrangements
6.1.2.2 Typical arrangements
-
7/25/2019 Technica Product Line
47/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 45
Cycloidal Propeller
(Voith-Schneider Propeller)
Twin-Propeller
Podded Propulsion
Typical arrangements Type
-
7/25/2019 Technica Product Line
48/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION46 |
Power demand: Fixed relation between ship speed and diesel
engine power. Clear dependence on hull
resistance.
Ship speed: Adjusting diesel engine speed
Astern: Reversible gearbox
Control: Not applicable
Gearbox: Reversing reduction gearbox
Rudder: Needed
Power demand: Every possible pitch has its own fixed
relation to the effective power curve.
Clear dependence on hull resistance.
Ship speed: Adjusting diesel engine speed or propeller
pitch
Astern: Reversible gearbox or fully reversible propeller
Control: Hydraulic power pack arranged in shaft line
or at the gearbox
Gearbox: Non-reversing reduction gearbox
Rudder: Needed
Power demand: Fixed relation between shaft speed and diesel
engine power. Small dependence on hull
resistance.
Ship speed: Adjusting diesel engine speed and/ or using
the bucket
Astern: Reversing bucket (optional)
Control: Hydraulic power pack for steering and
reversing bucket
Gearbox: Non-reversing/reversing reduction gearbox
Rudder: If no steering equipment at waterjet
Type Manoeuvring characteristics
6.1.2.3 Manoeuvring characteristics
Fixed Pitch Propeller (FPP)
Controllable Pitch Propeller
(CPP)
Waterjet
-
7/25/2019 Technica Product Line
49/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 47
Power demand: Fixed relation between ship speed and
diesel engine power.
Clear dependence on hull resistance.
Ship speed: Adjusting diesel engine speed
Astern: Turning the propeller pod
Control: Hydraulic power pack for steering
Gearbox: Integrated
Rudder: No need
Power demand: Every possible blade pitch has its own fixed
relation to the effective power curve.Clear dependence on hull resistance.
Ship speed: Adjusting diesel engine speed or blade pitch
Astern: Control of thrust direction via blade pitch
Control: Hydraulic power pack
Gearbox: Integrated
Rudder: No need
Power demand: Fixed relation between ship speed and
diesel engine power.
Clear dependence on hull resistance.
Ship speed: Adjusting diesel engine speed
Astern: Turning the propeller pod
Control: Hydraulic power pack for steering
Gearbox: Integrated
Rudder: No need
Power demand: Full electric propulsion, fixed relation
between ship speed and electric motor
power.
Clear dependence on hull resistance.
Ship speed: Adjusting motor speed (electrical)
Astern: Turning the pod or reversing the motor
Control: Hydraulic power pack for steering
Gearbox: No need
Rudder: No need
Manoeuvring characteristics Type
Rudderpropeller
Cycloidal Propeller
(Voith-Schneider Propeller)
Twin-Propeller
Podded Propulsion
-
7/25/2019 Technica Product Line
50/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION48 |
6.1.3 Shaft Line and Gearbox Losses
The brake power (PB) of the diesel engine will be transferred via a shaft line to the propeller
flange. All power consumers in the shaft line will be counted as mechanical losses (m).
The main loss will occur in the gearbox depending on how many gears and clutches are used
and how many pumps are attached. In any case the pumps will generate the main part of the
losses.
PB = diesel engine brake Power in kW
PD = delivered Power in kW
m = mechanical efficiency
At the design point the following approximations can be used:
m = 0.98 non reversible gearbox (with and without intermediate gear)
m = 0.97 reversible gearbox
The manufacturer must provide information about the losses in the gearbox.
Between diesel engine output flange and propeller, the diesel engine has to deal with two
different kinds of mechanical friction losses:
1 Static friction loss (no oil film yet)
2 Dynamic friction loss (built up oil film)
The dynamic friction losses in the shaft line bearings (
-
7/25/2019 Technica Product Line
51/236
| 49
-
7/25/2019 Technica Product Line
52/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION50 |
6.2 Propeller
6.2.1 Propeller Geometry
To understand the hydrodynamic action of a propeller it is essential to have a thorough under-
standing of basic propeller geometry and the corresponding definitions. Figure 6.2.1 shows
what is meant by rake and skew of a propeller. The use of skew has been shown to be effective
in reducing vibratory forces, hull pressure induced vibration and retarding cavitation develop-
ment. With rake, the stress in the blade can be controlled and slightly thinner blade sections
can be used, which can be advantageous from blade hydrodynamic considerations.
Skew
Rotation
Diameter
Rake
Hub
Figure 6.2.1: Scheme of propeller geometry (skew and rake)
Every propeller needs a hub to fix the blades and to place the control mechanism (CPP) for the
blades. This results in different hub sizes for a FPP and a CPP (propeller) and is a characteristic
difference between these two types. The hub size of a CPP is 10 to 15% larger (related to the
diameter). See the figures in the overview section (6.1.2) also.
Another difference is the blade area ratio (A/A0). Blade area ratio is simply the blade area, a
defined form of the blade outline projection, divided by the propeller disc area (A0). As a con-
trollable pitch propeller is usually fully reversible in the sense that its blades can pass through
zero pitch condition care has to be taken that the blades do not interfere with each other. With
equal number of blades, a CPP will have a somewhat smaller area ratio than a FPP.
-
7/25/2019 Technica Product Line
53/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 51
The expression (P/D) is the commonly used pitch ratio. Alternatively the pitch angle can be
given. Due to the geometry of the blade the pitch angle varies from hub to tip.
D = propeller diameter in m
R = propeller radius in m
r = location on propeller radius in m
x = dimensionless location on propeller radius (r/R)
Generally the characteristic pitch angle is defined at a propeller ratio of x = 0.7.
Unfortunately there are several pitch definitions and the distinction between them is of
considerable importance to avoid analytical mistakes:
1 nose tail pitch
2 face pitch
The nosetail pitch line is today the most commonly used and referenced line. The face pitch
line is basically a tangent to the section of the pressure side surface and used in older model
test series (e.g. the Wageningen B Series). Although the difference is not big, it can be the
reason for using different values for the same propeller.
The following equation can be used to convert the pitch from P/D to or vice versa.
P/D= relation propeller pitch/propeller diameter
x = dimensionless location on propeller radius (r/R)
= pitch angle
D = 2R and x = (dimensionless radius) (E- 6.2.1)
= arc tan ( ) (E- 6.2.2)
r
R
P/Dx
-
7/25/2019 Technica Product Line
54/236
Rudder a
D
b
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION52 |
6.2.2 Propeller Type Selection
6.2.2.1 FPP or CPP
The selection of a propeller for a particular application usually is a result of the consideration of
different factors. These factors can be determined in pursuit of maximum efficiency with
respect to:
> noise limitation
> ease of manoeuvrability
> cost of installation and so on.
Each vessel has to be considered with regard to its own special application. The choice
between a fixed pitch (FPP) and a controllable pitch propeller (CPP) has been a long contested
debate between the proponents of the various systems. Controllable pitch propellers have
gained complete dominance in Roll On Roll Off (Ro-Ro) vessels, ferry and tug markets with
vessels of over 1500 kW propulsion power with an operational profile that can be better
satisfied by a CPP than by a two speed gearbox. For all other purposes the simpler fixed pitch
propeller appears to be a satisfactory solution. Comparing the reliability between the simply
build- up FPP and the mechanically more complex CPP shows, that the CPP has achieved the
status of being a reliable component.
The CPP has the advantage of permitting constant speed operation of the propeller. Although
this leads to a loss in efficiency, it does readily allow the use of shaft driven generators, if this
is a demand in the operational profile of the ship.
During the last years the electric drive
with podded propeller has been arising
on the market. Without the need of a
gearbox and controllability of the electric
motor a fixed pitch propeller seems tobe the best choice. But it must not be
forgotten to compare the economical
aspects of an extended motor control
with the cost of a CPP.
Figure 6.2.2: Propeller clearance
Propeller Clearance
a 0.25D
b 0.20D
-
7/25/2019 Technica Product Line
55/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 53
6.2.2.2 Propeller size
To determine the propeller diameter (D) for certain delivered power (PD) at a propeller speed (n)
and a ship speed (v) is a complex routine. For some propellers calculation procedures are availa-
ble, which can be found in the literature with all necessary assumptions that have to be made or
simply direct your questions to the manufacturer.
The size of a propeller cannot only be calculated theoretically, but must also be adapted to the
ship. The ship must provide the necessary space for the propeller including a suf ficient clearance
between propeller and hull (Figure 6.2.2). Due to hydrodynamic effects and/or cavitation the
ship hull and the rudder can be mechanically excited, which can cause heavy vibrations at the
stern or the rudder with the possibility of mechanical failures.
The values shown in Figure 6.2.2 are only a design proposal. For more detailed information see
the recommendations of a classification society or the responsible yard.
6.2.2.3 Cavitation and thrust breakdown
The majority of vessels of approximately 100 tonnes displacement or more can control, not
eliminate, the effects of cavitation. That means to reduce the erosive effect on material and
to improve its hydrodynamic performance as well as its behaviour as a source of vibration
excitation. But it must be remembered that there are very few propellers that are free from
cavitation. Most of them experience cavitation at some position in the propeller disc.
A few words about the effect of thrust breakdown: The power density of a propeller can only be
increased to a certain limit, which depends on the propeller parameters and especially on theblade area ratio. Obviously the cavitation occurs first at the tip section of a blade and extends
downward with higher power consumption. It is a matter of definition when these effects are
called thrust breakdown, e.g. if the cavitation exceeds below the 0.5 radius. Subsequently the
propeller efficiency will decrease rapidly.
6.2.2.4 Propeller for high speed vessels
For high-speed vessels where both the advance and rotational speeds are high and the propeller
immersion low, a point may be reached where it is not possible to acceptably control the effects
of cavitation. To overcome this problem the blade sections are permitted to fully cavitate, so that
the cavity developed on the back of the blade extends beyond the trailing edge and collapses into
the wake of the blade in the slipstream. Such propellers are called supercavitating propellers and
are frequently used in application on high-speed naval vessels and pleasure crafts.
For small high-speed crafts the concept of a surface piercing propeller has been successful. This
propeller operates partially in and partially out of the water. The design immersion measured
from the free surface to the centre line, can be reduced to zero or is controllable (e.g. Arneson
Surface Drive). In the partially immersed condition the propeller blades are commonly designed
to operate such that the pressure face of the blade remains fully wetted and the suction side is dry.
-
7/25/2019 Technica Product Line
56/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION54 |
6.2.3 Direction of Propeller Rotation
The direction of rotation can have consequences for manoeuvring and efficiency consider-
ations. Although the given explanations in literature are not really convincing the following
recommendations can be given:
Single shaft: (looking from aft at propeller)
FPP (fixed pitch propeller)
Direction of rotation: clockwise
CPP (controllable pitch propeller)
Direction of rotation: counter clockwise
-
7/25/2019 Technica Product Line
57/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 55
FPP (fixed pitch propeller)
Port side: counter clockwiseStarboard: clockwise
also named: outboard over top rotation
CPP (controllable pitch propeller)
Port side: clockwiseStarboard: counter clockwise
also named: inboard over top rotation
Twin shaft: (looking from aft at propeller)
For those who are still eager to hear a few words about the reasons for doing so, here are some
explanations from literature (no specific source).
Propeller efficiency:
It has been found that the rotation present in the wake field, due to the flow around the ship, at
the propeller disc can lead to a gain in propeller efficiency when the direction of rotation of the
propeller is opposite to the direction of rotation in the wake field.
-
7/25/2019 Technica Product Line
58/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION56 |
Manoeuvring (single propeller):
For ships with a single propeller the influence on manoeuvring is entirely determined by the
paddle wheel effect. When the ship is stationary and the propeller is started, the propeller
will move the afterbody of the ship in the direction of rotation. Thus with a fixed pitch propeller,this direction of initial motion will change with the direction of rotation, i.e. ahead or astern
thrust. In the case of a controllable pitch propeller the motion will tend to be unidirectional
because only the pitch changes from the ahead to the astern position. The direction of rotation
will not change.
In the astern thrust position FPP and CPP will have the same direction of rotation and assuming
that starboard is the main docking side there is an advantage to push off from the quay with
astern thrust.
Manoeuvring (twin propeller):
In addition to the paddle wheel effect other forces due to the pressure differential on the hull
and shaft eccentricity come into effect. The pressure differential, due to reverse thrusts of the
propellers on either side of the hull gives a lateral force and turning moment.
From the manoeuvrability point of view it can be deduced from test results that the fixed pitch
propellers are best when turning outboard over top. For the controllable pitch propeller no such
clear-cut conclusion exists.
Although these effects are small, the design should follow the given recommendations but if the
rules are not kept no great disadvantage arises.
6.2.4 Selection of Propeller Blade Number
Blade numbers generally range from three to seven. For merchant ships four, five or six blades
are favoured, although many tugs and fishing vessels frequently use three bladed designs. In
naval applications where the generated noise becomes important, blade numbers of five and
above predominate.
The number of blades shall be primarily determined by the need to avoid harmful resonant
frequencies of the ship structure and torsional machinery vibration frequencies. As blade
number increases cavitation problems at the blade root can be enhanced, since the blade
clearance becomes less.
It is also found that propeller efficiency and optimum diameter increase as the number of
blades decreases and to some extent, the propeller speed (n) will depend on the blade number.
-
7/25/2019 Technica Product Line
59/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 57
D = () (E- 6.3.2)PE
PD
6.3 Propeller Curve
6.3.1 Basics
When a ship is being towed and is not fitted with a propeller, the required force is called
resistance (R) and the necessary power to tow the ship at a certain speed (v) is:
PE = effective Power in kW
RT = total resistance in kN
v = ship speed in m/s
Basis for the design of a propulsive device is the effective power (P E) curve for a ship, showing
the relation between effective power and ship speed (v). The effective power curve will be
evaluated by a test facility or estimated with respect to a defined condition, i.e. usually the trial
condition.
Example: Trial condition for acceptance test
> new ship, clean hull
> sea state 0 1 (calm water), wind Beaufort 2 3
> load condition (defined, e.g. full load)
> no current
Figure 6.3.1: Trial condition (example)
The load of the propulsive device to match the effective power is called delivered power (P D)
and the relation between the effective and delivered power is called the propulsive efficiency
(D).
D = propulsive efficiency
PE = effective Power in kW
PD = delivered Power in kW
PE = RT v (kW) (E- 6.3.1)
-
7/25/2019 Technica Product Line
60/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION58 |
The propulsive efficiency is the product of:
> Propulsive unit efficiency in open water (0) depending on type, size, speed, e.g. (at design
point approx. 0 = 0.60 0.75).
> Hull efficiency (H) depending on wake fraction and thrust deduction fraction (at designpoint approx. 0.90 1.10).
> Relative rotational efficiency (R) depending on the propeller efficiency behind the ship and
the propeller open water efficiency (at design point approx. 0.95 1.02).
0 = propulsive efficiency in open water
H = hull efficiency
R = relative rotational efficiency
D = propulsive efficiency
The required effective power of the ship does not depend from ship speed (v) only, but also
environmental conditions (wind, sea state), hull roughness (clean, fouling) and actual load
condition have to be taken into consideration (Figure 6.3.2).
D = 0 H R () (E- 6.3.3)
Figure 6.3.2: Influence of change in resistance on effective power curve (example)
EffectivePowerPE
Ship Speed (v)
effective power curve(in service)
power difference atconst. Speed (v)
ship speed differenceat const. Power (PE)
effective powercurve (clean hull)
-
7/25/2019 Technica Product Line
61/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 59
1
2 3 4
Effective Power
Propeller DesignThe result of the propeller design can be presented in the following diagrams.
EffectivePower
(PE
)
Ship Speed (v)
DeliveredPower(PD
)
Ship Speed (v)
BrakePower(PB
)
Propeller Speed (n)
AsRequired
As Required
User defined
Figure 6.3.3: From effective to delivered power curve (example)
On the basis of a defined effective power curve (Figure 6.3.3, part 1) a propeller will be
designed. The relation between delivered power (PD) and ship speed (v) or propeller speed (n)
can be shown in single diagrams or a diagram using both ordinates. Figure 6.3.3, part 2 to 4,
shows some examples. The diagram with the propeller speed (n) as abscissa (X-axes) has the
advantage that the performance diagram of the diesel engine can be included as well.
-
7/25/2019 Technica Product Line
62/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION60 |
Every change in the effective power curve will be seen in the propeller curve. The example in
Figure 6.3.4 shows that due to the cubic characteristic of the propeller curve small changes
can have great effects.
Figure 6.3.4: Effect of change in resistance on delivered power curve (example)
Although the curves in Figure 6.3.2 and Figure 6.3.4 are similar in shape they are different.
The effective and the delivered power will be related by the propulsive efficiency (D).
This means that the propeller curve is only valid for the designed propeller. Changing the
geometry of the propeller (e.g. diameter, area ratio, pitch or the number of blades) leads to
a new power-speed relation, i.e. a new propeller curve. If the effective power curve changes,
e.g. from clean hull and fair weather to fouled hull and heavy weather the propeller curve will
also change. That leads to the conclusion: A change in the propeller curve can be initiated bythe ship (effective power) or by a modification of the propeller.
DeliveredPowerPD
Propeller Speed (n)
power difference at const.Propeller Speed (n)
propeller speed difference atconst. Power (PD)
propeller curve(clean hull)
propeller curve(in service)
-
7/25/2019 Technica Product Line
63/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION | 61
Figure 6.3.5: Effect of different propeller pitches on delivered power (example)
This different behaviour will have distinct consequences on the design of the chosen propeller
type.
DeliveredPowerPD
Propeller Speed (n)
design pitch
FPP: The propeller curve has a fixed relation to the effective power curve and will be influenced
by the ship (effective power) only.
CPP: Every possible pitch has its own fixed relation to the effective power curve. This leads to
multiple propeller curves (Figure 6.3.5). The propeller curve is influenced by the ship (effectivepower) and the propeller pitch.
CPP (Controllable Pitch Propeller)
propeller curves = lines of constant pitch
constant ship speed
pitch increases
pitch decreases
-
7/25/2019 Technica Product Line
64/236
6 PROPULSION, INTERACTION DIESEL ENGINE WITH APPLICATION62 |
6.3.2 Theoretical Propeller Curve
Diameter (D), delivered power (PD) and shaft speed (n) of the propeller can be calculated by the
propeller manufacturer, when the effective power curve is given and the design speed (v) and
the installed brake power (PB) have been chosen. Power and propeller speed (n) have to match
the installed power of the diesel engine.
If only the design point of the propeller or the diesel engine is known, a simple approximation
can be done by a theoretical propeller curve.
PD = delivered power in kW
PD rated = rated delivered power in kW
nprop = propeller speed in rpm
nprop rated = rated propeller speed in rpm
fixed propeller geometry
PB = diesel engine brake power in kW
PB r