Order-Independent Texture Synthesis Li-Yi Wei Marc Levoy Gcafe 1/30/2003.
date post
21-Dec-2015Category
view
221download
2
Symmetric Photography:Exploiting Data-sparseness in
Reflectance Fields
Gaurav Garg Eino-Ville Marc Levoy Hendrik P. A. Lensch
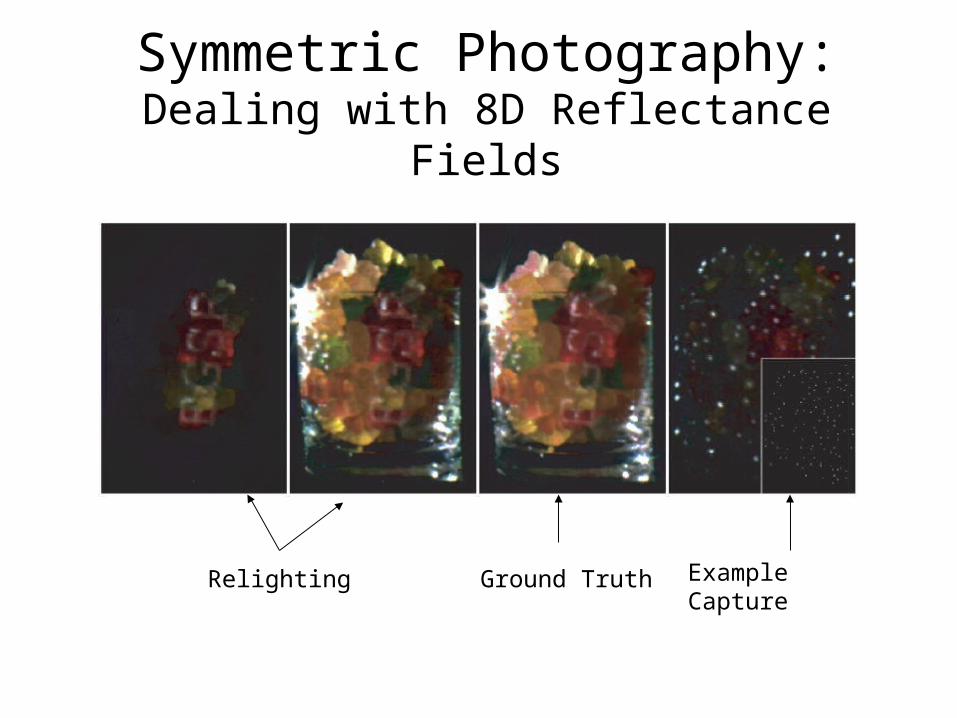
Symmetric Photography:Dealing with 8D Reflectance Fields
Relighting Ground Truth Example Capture
Overview
• Full 8D Reflectance field!– Changing View (4D) * Changing Light (4D)– Eg.: For Each 4D, 3x3 images at 100x100 res
results in 10^10 4D table
• How do we deal with data explosion?– Exploit Symmetry between light/view
• Helmholtz reciprocity
– Exploit Data Sparseness

Symmetric Photography
inout TLL Transport equation:
• T is symmetric (Helmholtz reciprocity)
• T is not sparse
• But sub-blocks of T are “data sparse”
4321
4
3
2
1
44434241
34333231
24232221
14131211
cccc
b
b
b
b
aaaa
aaaa
aaaa
aaaa
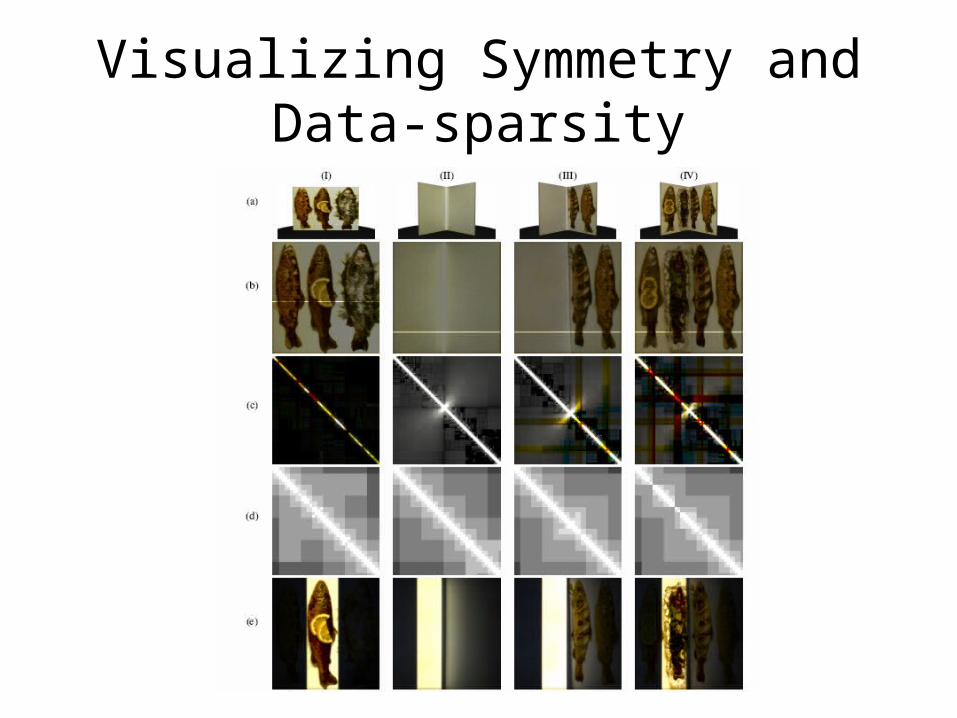
Visualizing Symmetry andData-sparsity
Outline
• Data Acquisition Setup
• Exploiting Symmetry and Data Sparsity in the Transport Matrix
• Results
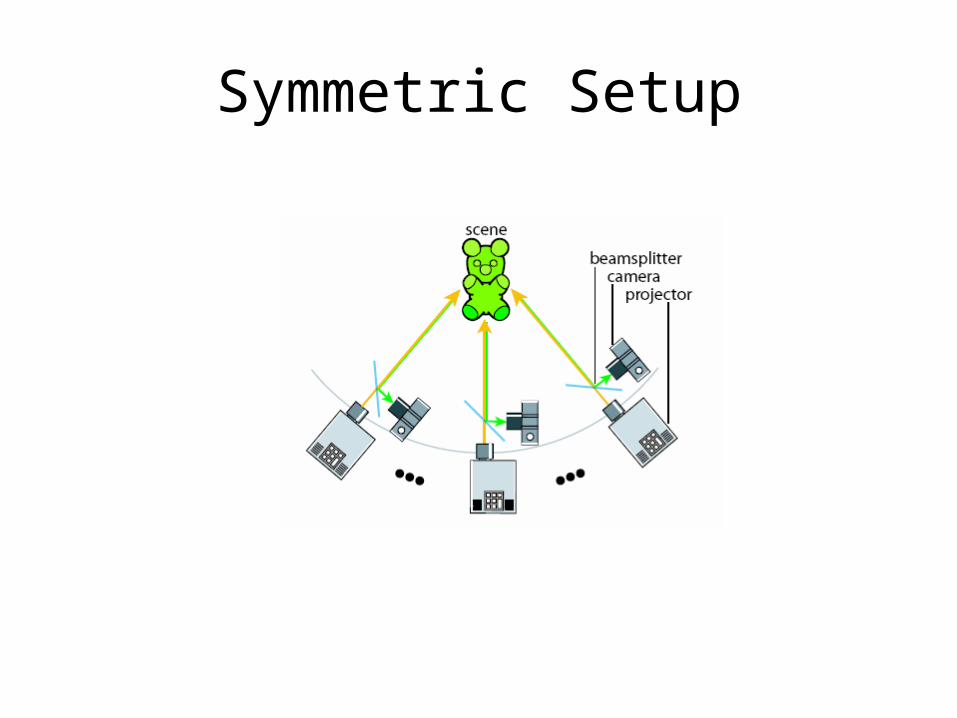
Symmetric Setup
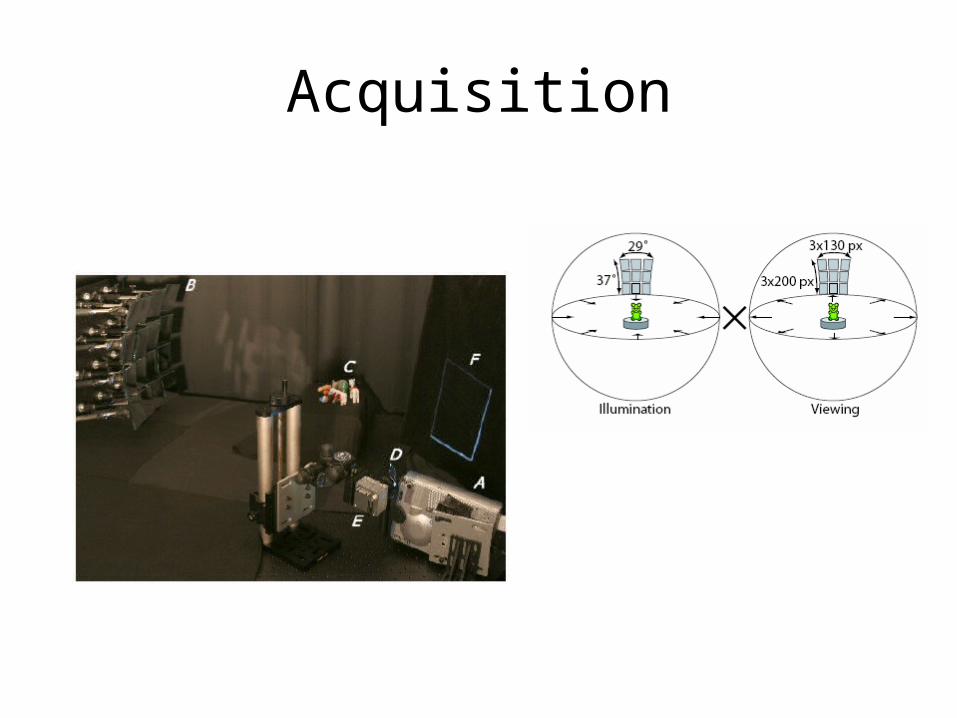
Acquisition

Outline
• Data Acquisition Setup
• Exploiting Symmetry and Data Sparsity in the Transport Matrix
• Results
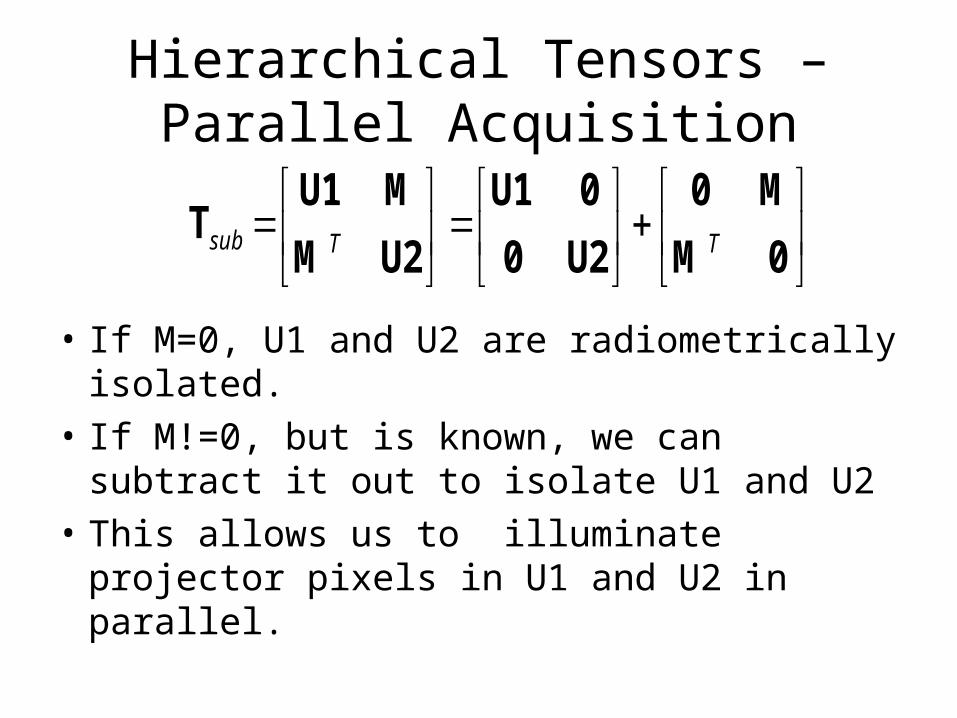
Hierarchical Tensors –Parallel Acquisition
• If M=0, U1 and U2 are radiometrically isolated.
• If M!=0, but is known, we can subtract it out to isolate U1 and U2
• This allows us to illuminate projector pixels in U1 and U2 in parallel.
0M
M0
U20
0U1
U2M
MU1T TTsub

Hierarchical Tensors –Rank-1 Approximation
• “An image captured by the camera is the sum of the columns corresponding to the pixels lit by the projector. The image is also the sum of the corresponding rows”
• Use two projector patterns (Pr and Pc) s.t.
and
• The rank-1 approximation of M is
0M
M0
U20
0U1
U2M
MU1T TTsub
cMpc rpMr T
prM

Hierarchical Acquisition
1. Already have a rank-1 approximation– For root node, use flood lit image for first approximation
2. Divide node by 16 and move to next level– 4 projector blocks X 4 camera blocks
– Use 4 projector patterns and capture 4 images (8 images total)
3. Evaluate previous level’s rank-1 approx against these images– If good enough, finish
– If the size of the projector block is down to a pixel, finish
– Else, use these images to create 16 rank-1 approximations, and goto 1.) for each of them
Note – I have heavily glossed over the selection of projector patterns

Outline
• Data Acquisition Setup
• Exploiting Symmetry and Data Sparsity in the Transport Matrix
• Results

Changing Light

Changing View
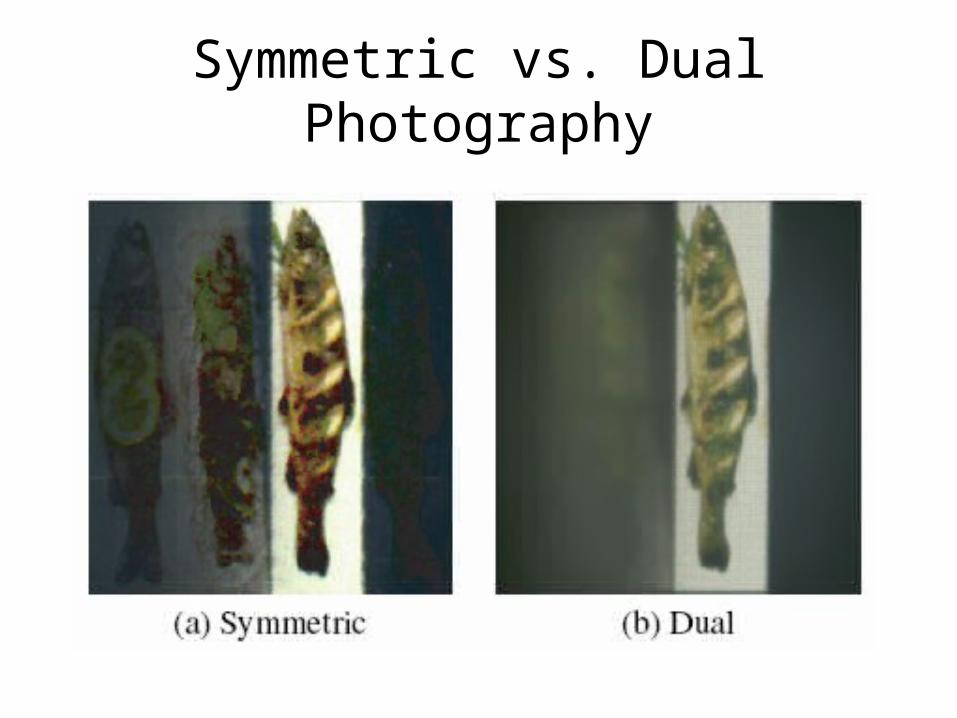
Symmetric vs. Dual Photography

Artifacts Due to Non-Symmetry
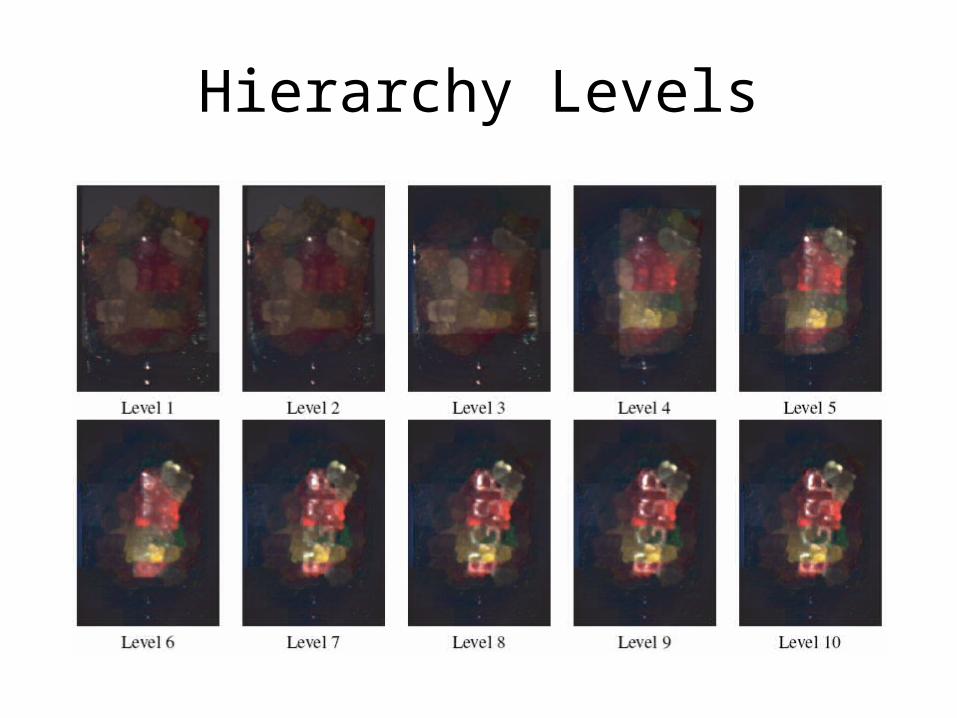
Hierarchy Levels

Table