
Stereo PIV flow-calibration in towing tank · Stereo PIV flow-calibration in towing tank S. Grizzi,...
9
1 Stereo PIV flow-calibration in towing tank S. Grizzi , F. di Felice INSEAN, Italian model ship basin, via di vallerano 139, 00129 Rome, Italy Abstract An enhancement of Stereo PIV calibration is presented. The feature of this technique is to calibrate the Stereo system directly from a uniform flow measurement. This is achieved making a first two-dimensional calibration of the measurement plane using a standard dotted target, then getting information of perspective and laser sheet thickness from some measurements of well-known flows (uniform flow). This technique results in three-dimensional measurements of high accuracy with a simple calibration phase and reduces mechanical misalignment and dot recognition errors. A very simple application of this technique is performed in towing tanks. The technique is tested to a tip vortex couple of a submarine bridge fin. Introduction Stereo particle image velocimetry (SPIV) is an extension of traditional particle image velocimetry (PIV) (Arroyo and Greated 1991; Willert 1997; Prasad 2000). Using principles of stereoscopic vision, SPIV reconstructs the three-component velocity field in a two-dimensional plane using two velocity fields derived using PIV from two cameras. This reconstruction process uses geometrical equations, calibrated to consider geometrical information of the stereoscopic system, to link the image planes to events occurring in the object plane. Different calibration techniques are possible: Geometric reconstruction relates the parameters of image acquisition and the measured two-dimensional velocity fields through geometrical parameters of the stereoscopic system (Prasad and Adrian 1993). Those parameters are affected by measurement uncertain and for complex stereoscopic configurations became more difficult. Two-dimensional calibration uses geometrical parameters to perform the reconstruction, similar to geometric reconstruction. It differs because the distortion field is derived from the calibration process rather than calculating distortion directly from the geometric parameters. Three-dimensional calibration techniques are more commonly used than two- dimensional ones (Soloff et al. 1997). The main advantage of three-dimensional calibration is that geometric information of the stereoscopic system is not required. Mapping functions are calibrated using a number of parallel planes near the imaging plane. In this way the functions correct distortions and contain also geometrical information required in reconstruction phase. The three-dimensional calibration technique uses a calibration target, which consists of a regular Cartesian grid of markers (Lawson and Wu 1997). Unfortunately the calibration phase is affected by misalignment errors of the calibration target and the laser sheet and shifting errors when target is moved on parallel planes near the imaging one. An interesting idea was developed in Willert (1997) and further in Wieneke (2005). This idea is to use the cross correlation of the particle images to generate additional information (disparity maps) for correcting the misalignment errors but this adds complexity and increase computational cost. Aim of present work is to introduce a simple calibration method based on a standard two- dimensional calibration for linking object plane with camera planes adding three- dimensional information obtained by a uniform flow.
Transcript of Stereo PIV flow-calibration in towing tank · Stereo PIV flow-calibration in towing tank S. Grizzi,...

1
Stereo PIV flow-calibration in towing tank
S. Grizzi, F. di Felice
INSEAN, Italian model ship basin, via di vallerano 139, 00129 Rome, Italy
Abstract An enhancement of Stereo PIV calibration is
presented. The feature of this technique is to
calibrate the Stereo system directly from a
uniform flow measurement. This is achieved
making a first two-dimensional calibration
of the measurement plane using a standard
dotted target, then getting information of
perspective and laser sheet thickness from
some measurements of well-known flows
(uniform flow). This technique results in
three-dimensional measurements of high
accuracy with a simple calibration phase and
reduces mechanical misalignment and dot
recognition errors.
A very simple application of this technique
is performed in towing tanks. The technique
is tested to a tip vortex couple of a
submarine bridge fin.
Introduction Stereo particle image velocimetry (SPIV) is
an extension of traditional particle image
velocimetry (PIV) (Arroyo and Greated
1991; Willert 1997; Prasad 2000).
Using principles of stereoscopic vision,
SPIV reconstructs the three-component
velocity field in a two-dimensional plane
using two velocity fields derived using PIV
from two cameras.
This reconstruction process uses geometrical
equations, calibrated to consider geometrical
information of the stereoscopic system, to
link the image planes to events occurring in
the object plane.
Different calibration techniques are possible:
Geometric reconstruction relates the
parameters of image acquisition and the
measured two-dimensional velocity fields
through geometrical parameters of the
stereoscopic system (Prasad and Adrian
1993). Those parameters are affected by
measurement uncertain and for complex
stereoscopic configurations became more
difficult.
Two-dimensional calibration uses
geometrical parameters to perform the
reconstruction, similar to geometric
reconstruction. It differs because the
distortion field is derived from the
calibration process rather than calculating
distortion directly from the geometric
parameters.
Three-dimensional calibration techniques
are more commonly used than two-
dimensional ones (Soloff et al. 1997).
The main advantage of three-dimensional
calibration is that geometric information of
the stereoscopic system is not required.
Mapping functions are calibrated using a
number of parallel planes near the imaging
plane. In this way the functions correct
distortions and contain also geometrical
information required in reconstruction
phase.
The three-dimensional calibration technique
uses a calibration target, which consists of a
regular Cartesian grid of markers (Lawson
and Wu 1997).
Unfortunately the calibration phase is
affected by misalignment errors of the
calibration target and the laser sheet and
shifting errors when target is moved on
parallel planes near the imaging one.
An interesting idea was developed in Willert
(1997) and further in Wieneke (2005). This
idea is to use the cross correlation of the
particle images to generate additional
information (disparity maps) for correcting
the misalignment errors but this adds
complexity and increase computational cost.
Aim of present work is to introduce a simple
calibration method based on a standard two-
dimensional calibration for linking object
plane with camera planes adding three-
dimensional information obtained by a
uniform flow.
2
Flow Calibration Usually in a Soloff based algorithm the
calibration phase is accomplished by the
definition of polynomial mapping functions
between object and camera planes.
This type of calibration defines polynomial
coefficients using least-square applied on a
three-dimensional group of points extracted
from many target positions.
Calibration points are extracted by many
images of a dotted target placed on parallel
planes around center of the laser sheet.
In this phase misalignment errors between
laser sheet and target plane are possible and
are also possible mechanical misalignments
during shifting of it.
The presented technique instead uses only
two-dimensional information from a target
image to define correspondence between
cameras and object plane and obtain
additional necessary information from
acquisitions of a constant flow field. In fact
the knowledge of a constant flow
(W0(x,y,z,t) = C) projected on both camera
planes contain information about distortions,
optical aberrations and misalignment errors,
moreover this calibration is not affected by
target shifting errors.
Calibrating mapping functions using this
information gives the capability to
reconstruct 2D3C flow and at the same time
to correct misalignment errors.
Necessary to this phase is to have an exactly
constant flow, for this reason this technique
is easy in towing tanks, in fact having a
stagnant water tank and mounting the stereo
system on a carriage is possible to move it in
water to a constant speed obtaining so
desired fields.
Assuming z = 0 plane the center of the laser
sheet, the reference acquisition is made to a
constant speed W0 with a delay time Dt
between two consecutive frames, so is
reasonable to assume that frames gives a
better description of the laser volume
between z = -W0*Dt/2 and z = +W0*Dt/2
zone. Changing W0 speed or delay time Dt is
possible to obtain a more complete
description of laser sheet thickness until
correlation fails, which indicates particles
trespassing laser sheet.
Polynomial mapping functions are used
(Soloff et al. 1997) (Eq.1). In a first step the
degree of the polynomial is 2nd
for x and y
and is 1st for z.
(X,Y)l,r = ∑ ai*xj*y
k*z
m Eq.1
In these functions, absolute object
coordinates (x,y,z) and cameras coordinates
(X,Y)l,r are present.
A coordinate change is necessary to
introduce velocity information from constant
field, in fact x= x0+Dx and Dx=U*Dt. The
x0, y0 and z0 information are given by two-
dimensional calibration and U0, V0, W0 are
given by calibration flow acquisition.
The 2D3C field reconstruction uses mapping
functions gradients as follow:
xxFX
j
iji
x
FF
,)(
With i=1,2 and j=1,2,3
3
2
1
)2(
3,2
)2(
2,2
)2(
1,2
)2(
3,1
)2(
2,1
)2(
1,1
)1(
3,2
)1(
2,2
)1(
1,2
)1(
3,1
)1(
2,1
)1(
1,1
)2(
2
)2(
1
)1(
2
)1(
1
x
x
x
FFF
FFF
FFF
FFF
X
X
X
X
(Soloff et al. 1997)
To comparing results, Soloff based
algorithm with standard three-dimensional
calibration are used.
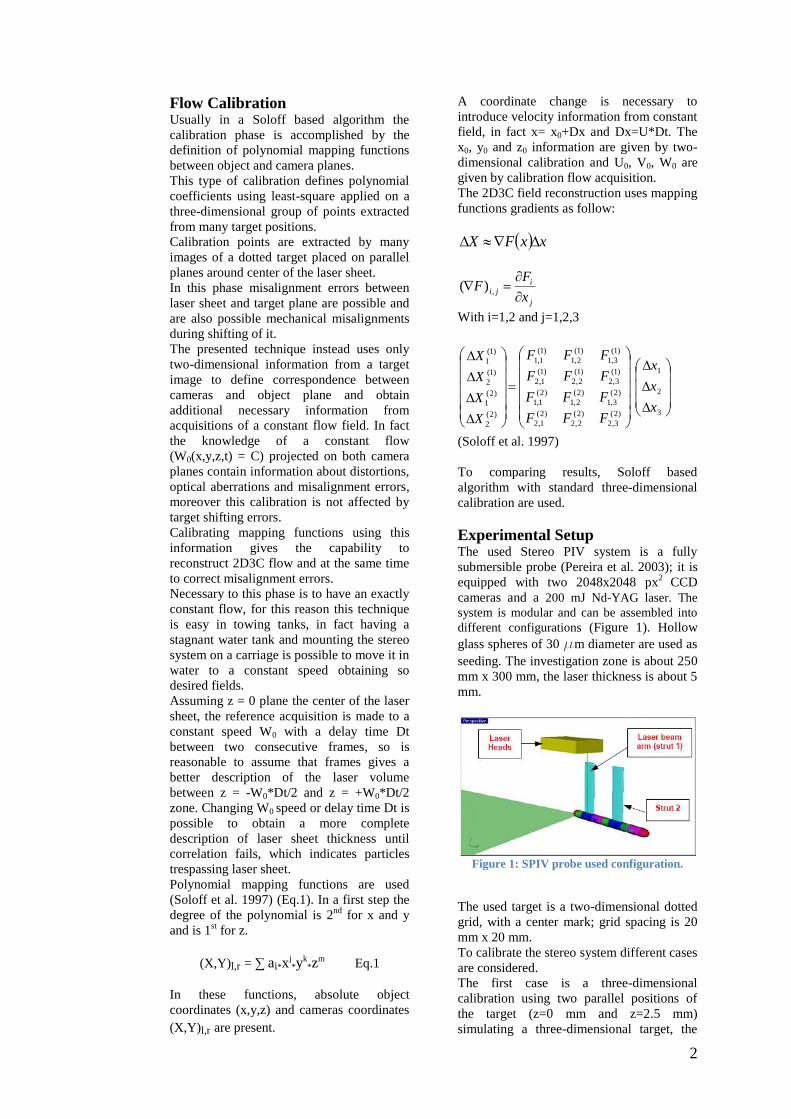
Experimental Setup The used Stereo PIV system is a fully
submersible probe (Pereira et al. 2003); it is
equipped with two 2048x2048 px2
CCD
cameras and a 200 mJ Nd-YAG laser. The
system is modular and can be assembled into
different configurations (Figure 1). Hollow
glass spheres of 30 mm diameter are used as
seeding. The investigation zone is about 250
mm x 300 mm, the laser thickness is about 5
mm.
Figure 1: SPIV probe used configuration.
The used target is a two-dimensional dotted
grid, with a center mark; grid spacing is 20
mm x 20 mm.
To calibrate the stereo system different cases
are considered.
The first case is a three-dimensional
calibration using two parallel positions of
the target (z=0 mm and z=2.5 mm)
simulating a three-dimensional target, the
3
degree of the mapping polynomial is the 2nd
for x and y and is the 1st for z.
The second case is a three-dimensional
calibration using thirteen parallel positions
of the target (2 mm spacing between each
position), the degree of the mapping
polynomial is the 3rd
for x and y and is the
2nd
for z.
The second case is a three-dimensional
calibration using thirteen parallel positions
of the target (2 mm spacing between each
position), the degree of the mapping
polynomial is the 4th
for x and y and is the
3rd
for z.
The fourth case is a two-dimensional
calibration using the z=0 position of the
target added to the constant flow calibration
with only 1 value of the displacement
±W0*Dt/2 (Flow Calibration), the degree of
the mapping polynomial is the 2nd
for x and
y and is the 1st for z.
The fifth case is a flow calibration using
mapping polynomial functions, 3rd
x and y
and 2nd
z degree.
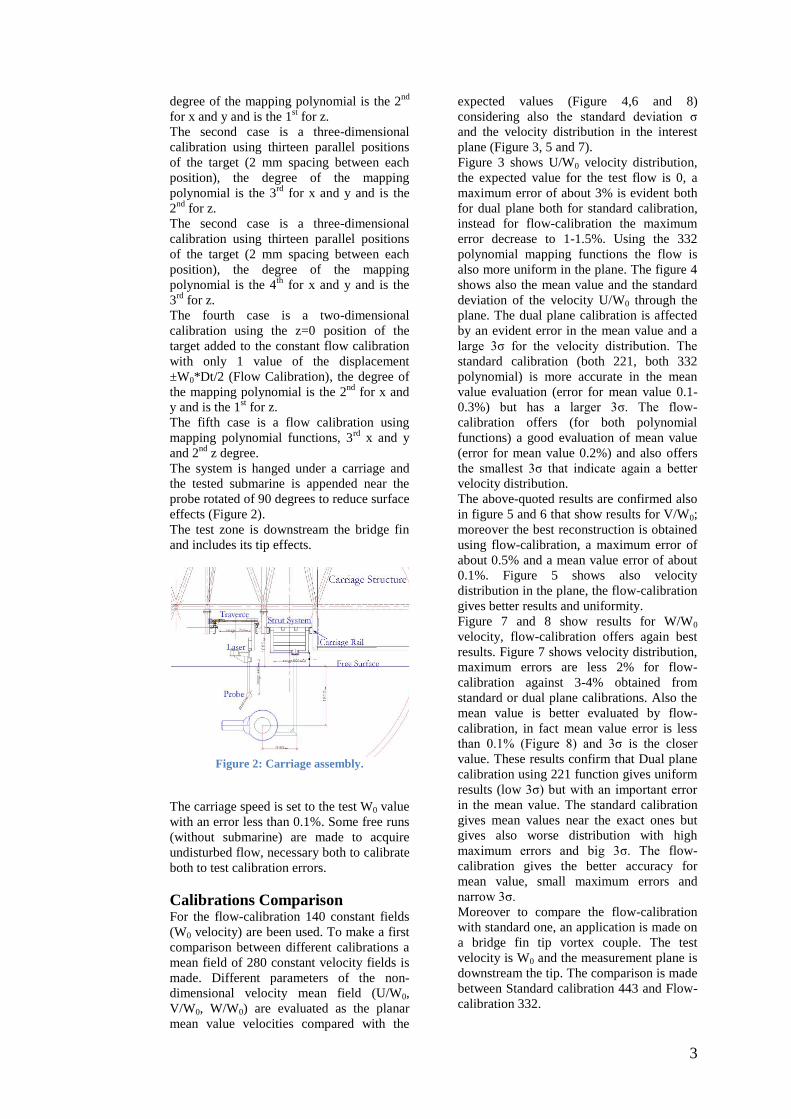
The system is hanged under a carriage and
the tested submarine is appended near the
probe rotated of 90 degrees to reduce surface
effects (Figure 2).
The test zone is downstream the bridge fin
and includes its tip effects.
Figure 2: Carriage assembly.
The carriage speed is set to the test W0 value
with an error less than 0.1%. Some free runs
(without submarine) are made to acquire
undisturbed flow, necessary both to calibrate
both to test calibration errors.
Calibrations Comparison For the flow-calibration 140 constant fields
(W0 velocity) are been used. To make a first
comparison between different calibrations a
mean field of 280 constant velocity fields is
made. Different parameters of the non-
dimensional velocity mean field (U/W0,
V/W0, W/W0) are evaluated as the planar
mean value velocities compared with the
expected values (Figure 4,6 and 8)
considering also the standard deviation σ
and the velocity distribution in the interest
plane (Figure 3, 5 and 7).
Figure 3 shows U/W0 velocity distribution,
the expected value for the test flow is 0, a
maximum error of about 3% is evident both
for dual plane both for standard calibration,
instead for flow-calibration the maximum
error decrease to 1-1.5%. Using the 332
polynomial mapping functions the flow is
also more uniform in the plane. The figure 4
shows also the mean value and the standard
deviation of the velocity U/W0 through the
plane. The dual plane calibration is affected
by an evident error in the mean value and a
large 3σ for the velocity distribution. The
standard calibration (both 221, both 332
polynomial) is more accurate in the mean
value evaluation (error for mean value 0.1-
0.3%) but has a larger 3σ. The flow-
calibration offers (for both polynomial
functions) a good evaluation of mean value
(error for mean value 0.2%) and also offers
the smallest 3σ that indicate again a better
velocity distribution.
The above-quoted results are confirmed also
in figure 5 and 6 that show results for V/W0;
moreover the best reconstruction is obtained
using flow-calibration, a maximum error of
about 0.5% and a mean value error of about
0.1%. Figure 5 shows also velocity
distribution in the plane, the flow-calibration
gives better results and uniformity.
Figure 7 and 8 show results for W/W0
velocity, flow-calibration offers again best
results. Figure 7 shows velocity distribution,
maximum errors are less 2% for flow-
calibration against 3-4% obtained from
standard or dual plane calibrations. Also the
mean value is better evaluated by flow-
calibration, in fact mean value error is less
than 0.1% (Figure 8) and 3σ is the closer
value. These results confirm that Dual plane
calibration using 221 function gives uniform
results (low 3σ) but with an important error
in the mean value. The standard calibration
gives mean values near the exact ones but
gives also worse distribution with high
maximum errors and big 3σ. The flow-
calibration gives the better accuracy for
mean value, small maximum errors and
narrow 3σ.
Moreover to compare the flow-calibration
with standard one, an application is made on
a bridge fin tip vortex couple. The test
velocity is W0 and the measurement plane is
downstream the tip. The comparison is made
between Standard calibration 443 and Flow-
calibration 332.

4
Figure 4: U/W0 planar mean value. Error bars indicate ±3σ.
Figure 3: U/W0 distribution.

5
Figure 6: V/W0 planar mean value. Error bars indicate ±3σ.
Figure 5: V/W0 distribution.

6
Figure 8: W/W0 planar mean value. Error bars indicate ±3σ.
Figure 7: W/W0 distribution.

7
Tip Vortex Couple A couple of tip vortexes are generated by the
bridge fin moving with a 0° drift angle from
the tip. The bridge fin can be assimilated to
a bold wing with a high thickness and low
aspect ratio, so the pressure distribution
forces the flow to move around the tip,
because the thickness of the fin and the 0°
drift angle, two opposite vortex are
generated (Figure 9).
Figure 9: Bridge fin: tip vortex couple.
Figure 10 shows the non-dimensional
velocity W/W0 for the interest plane
(Standard calibration 433 versus Flow
calibration 332) results are obtained using
175 acquired frames.
As expected the flow-calibration (332) gives
a more uniform external flow, less
influenced by optical aberrations and
misalignment errors, in fact this
reconstruction corrects this kind of errors.
Figure 10: Couple of tip vortexes W/W0
Figure 11 shows a detail of the vorticity and
cross flow: no differences are evident
principally for the vorticity field; this
indicates that the errors on the gradients are
negligible. To evaluate cross flow errors, a
comparison between velocities extracted on
the red line in Figure 11 is made (Figure 12
and 13).
Figure 11: Vorticity (up) and Cross Flow
(down): the red line is the comparison line.
As expected, there are relevant differences
principally regarding U/W0 velocity, all the
stereo reconstructions give good results for
V component but for U component the flow-
calibration based one gives less errors
especially in the peripheral zones of the
field.

8
Conclusions The flow-calibration method is a simple and
efficient algorithm for calibrating
Polynomial mapping functions, using a
constant flow no alignment errors are
present and optical aberrations are
accurately compensated.
Unfortunately to have an accurate uniform
flow a towing tank is needed.
The residual errors are generated principally
during the interpolation phase of the stereo
reconstruction. Future enhancements of this
stereo-technique are settled to correct also
numerical errors.
Acknowledgements The present work was supported by the
Italian “MINISTERO DEI TRASPORTI” in
the framework of the INSEAN “Programma
Ricerche Luglio 2006 – Dicembre 2007”.
Figure 12: U/W0 Comparison on the red line.
Figure 13: V/W0 Comparison on the red line.

9
References
Arroyo M, Greated C (1991) Stereoscopic particle image velocimetry. Meas Sci Technol 2:1181–1186
Lawson N, Wu J (1997) Three-dimensional particle image velocimetry: experimental error analysis of a
digital angular stereoscopic system. Meas Sci Technol
8:1455–1464
Pereira F, Costa T, Felli M, Calcagno G, Di Felice F (2003) A versatile fully submersible Stereo-PIV probe for tow tank applications. 4th ASME_JSME Joint
Fluids Engineering Conference, Honolulu, Hawaii,
USA
Prasad A, Adrian R (1993) Stereoscopic particle
image velocimetry applied to liquid flows. Exp Fluids 15:49–60
Prasad A (2000) Stereoscopic particle image velocimetry. Exp Fluids 29:103–116
Raffel M, Willert C, Kompenhans J (1998) Particle image velocimetry: a practical guide. Springer, Berlin
Soloff S, Adrian R, Liu Z (1997) Distortion compensation for generalized stereoscopic particle
image velocimetry. Meas Sci Technol 8:1441–1454
Wieneke B (2005) Stereo-piv using self-calibration on particle images. Exp Fluids 39:267–280
Willert C (1997) Stereoscopic digital particle image velocimetry for application in wind tunnel flows. Meas
Sci Technol 8:1465–1479
Zang W, Prasad A (1997) Performance evaluation of a
Scheimpflug stereocamera for particle image
velocimetry. Appl Opt 36:8738– 8744















![WAKE FLOW MEASUREMENTS IN TOWING TANKS … FLOW MEASUREMENTS IN TOWING TANKS WITH PIV J. Tukker\ JJ. ... Computational Fluid Dynamics ... manual [8]). For the measurements ...](https://static.fdocuments.us/doc/165x107/5ace81c27f8b9a1d328be484/wake-flow-measurements-in-towing-tanks-flow-measurements-in-towing-tanks-with.jpg)
