Steady State and Step Response By: Alex...
31
University of Tennessee at Chattanooga Steady State and Step Response By: Alex Bedley Engineering 3280L Buff (Alexander Hudson, Ashley Poe) February 1, 2013
-
Upload
truongthien -
Category
Documents
-
view
214 -
download
1
Transcript of Steady State and Step Response By: Alex...

University of Tennessee at Chattanooga
Steady State and Step Response
By: Alex Bedley
Engineering 3280L
Buff
(Alexander Hudson, Ashley Poe)
February 1, 2013

Alex Bedley February 1, 2013 2
Introduction
In the past two experiments, we were conducting experiments to obtain steady state
operating curves and step response curves with respect to certain motor input
percentages. To begin the experiments for the steady state operating curve (SSOC), trial
and error is needed to approximate the input percentage, in order to have the proper
output for each particular range (low, middle, and high). Once the desired input and
output have been figured, a graph was generated to determine the SSOC; this curve will
help to approximate an output value given at any specific input value within the desired
range.
The SSOC can help with the next lab, the objective of the second experiment is to
determine the system steady state gain, time constant, and dead time for the flow system
with a step response using a variety of different step sizes and input values.
Following the introduction, the background and the theory will be discussed in order to
provide a further detailed understanding of the lab experiment and setup process. After
the background and the theory, the operating procedure is explained in order to run the
experiment and understand the included operating variables. Results and discussion then
follow and state the values gathered in the lab in tabular and graphical form, emphasize
and the importance of the values gathered. Finally, the conclusion and recommendations
will give an overview of the results and the possible ways to improve the experiment.
Alex Bedley February 1, 2013 3
Background and Theory
The filter wash flow control system is operated via the internet. The flow system is
accessed by a link to weblab.utc.edu which can be found on the ENGR3280L
homepage. The system allows for different input percentages to be applied. These
different inputs proved specific flow rate outputs. The system inputs, the valve
positions (open or closed), and experimental time duration can be varied during the
experiment by the user.
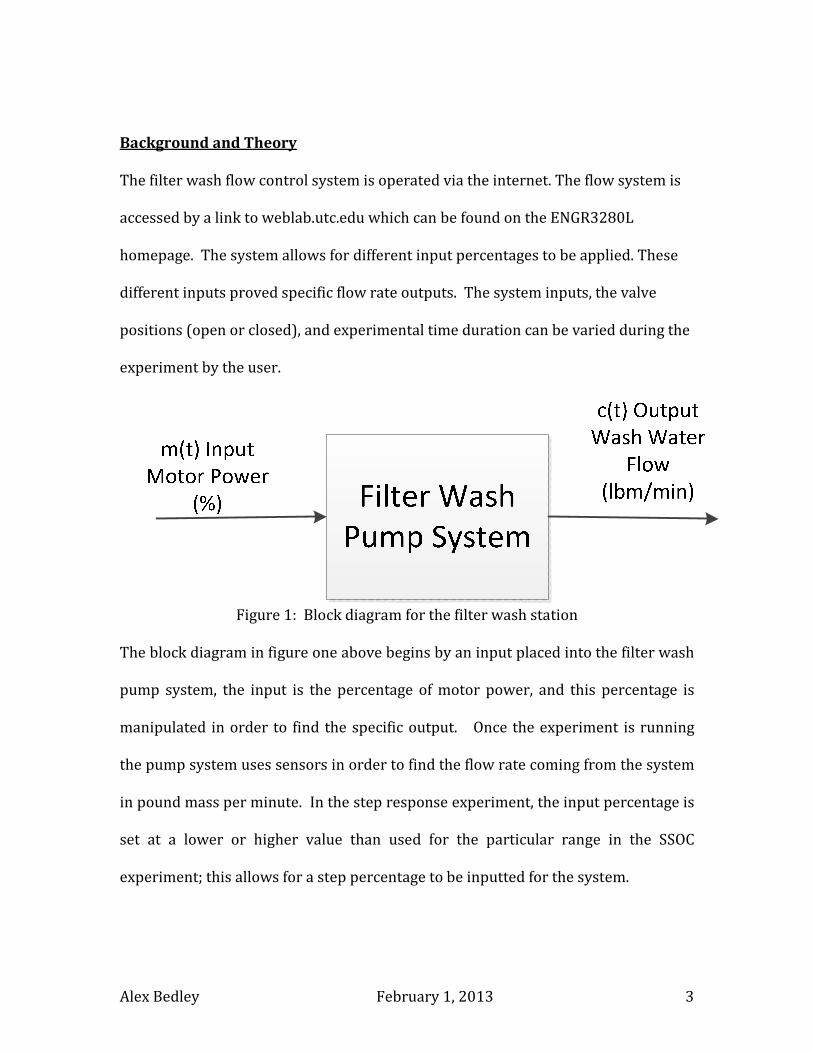
Figure 1: Block diagram for the filter wash station
The block diagram in figure one above begins by an input placed into the filter wash
pump system, the input is the percentage of motor power, and this percentage is
manipulated in order to find the specific output. Once the experiment is running
the pump system uses sensors in order to find the flow rate coming from the system
in pound mass per minute. In the step response experiment, the input percentage is
set at a lower or higher value than used for the particular range in the SSOC
experiment; this allows for a step percentage to be inputted for the system.
Alex Bedley February 1, 2013 4
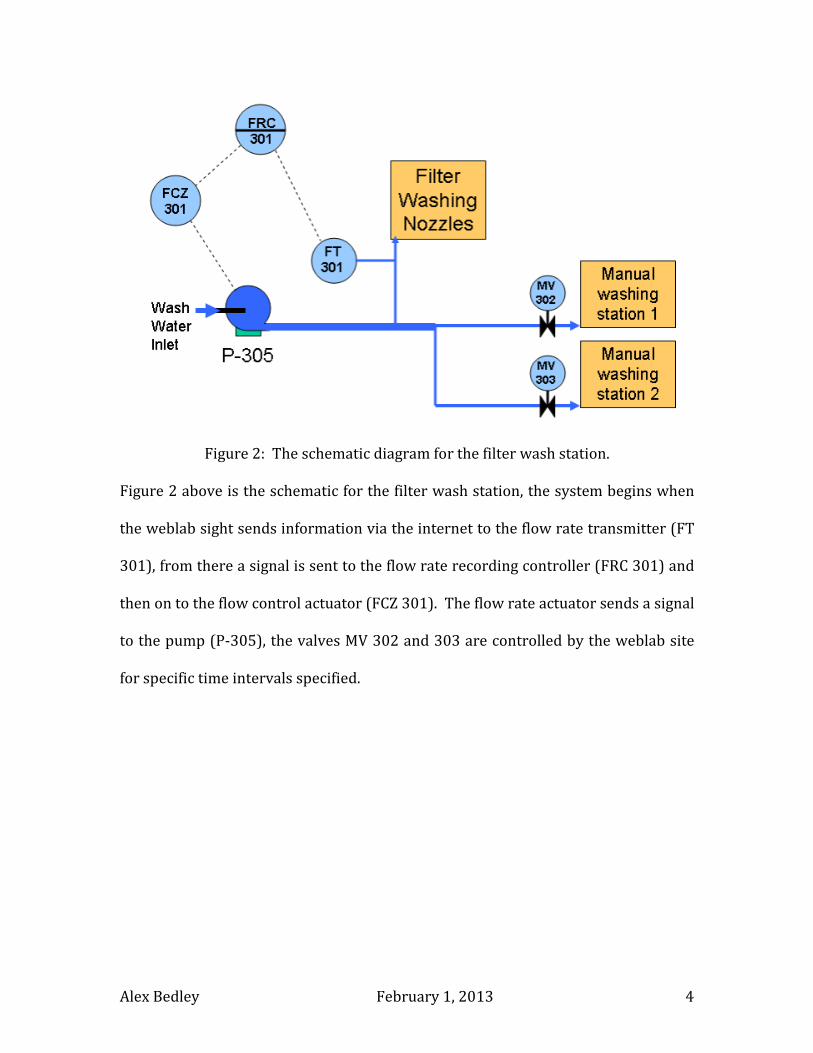
Figure 2: The schematic diagram for the filter wash station.
Figure 2 above is the schematic for the filter wash station, the system begins when
the weblab sight sends information via the internet to the flow rate transmitter (FT
301), from there a signal is sent to the flow rate recording controller (FRC 301) and
then on to the flow control actuator (FCZ 301). The flow rate actuator sends a signal
to the pump (P-305), the valves MV 302 and 303 are controlled by the weblab site
for specific time intervals specified.

Alex Bedley February 1, 2013 5
Procedure
Both experiments begin with a screen that will control the input percentage, total
time for the experiment, and the time for the valves to be closed or open. Our
system requires outputs in the range of 19-31 lbm/min with both valves closed for
the entire experimental time duration.
To begin the steady state operating experiment, a basic value needs to be guessed to
receive an output for the system. Trial and error is needed to pin point the input for
our particular output, this will take several iterations. Once the output is reached
for several values throughout the desired range, the input and output can be used to
predict a steady state operation curve. The curve predicts output given an input
multiplied by an operation constant.
The step response experiment has a place to input the beginning input percentage
and an added step value on the screen. For the step response experiment, the step
values can be either positive or negative, in order to get a step up or step down
output vs. time. The step response uses the final input that falls between the
individual ranges; the input used in the SSOC experiment will become the final value
after the step is performed. A lower or higher value is placed in the initial input on
the left side of the screen, with both valves closed and a step value must be inputted
into the right side of the screen to allow for calculations to be produced after the
experiments.
The step value must be negative for a step down function and positive for a step up.
Also inputted on the main screen of the step response is the time for the step to

Alex Bedley February 1, 2013 6
occur and total time for the experiment; the experiment worked well when the total
experiment time was around 40 seconds with a step at 20 seconds, this time frame
allowed the system to reach steady state before and after the step. At the bottom of
the screen, both valves need to be closed for the entire experiment. Once the
experiment has run the entire time set, the values from the sensor can be exported
to Excel.
Alex Bedley February 1, 2013 7
Results
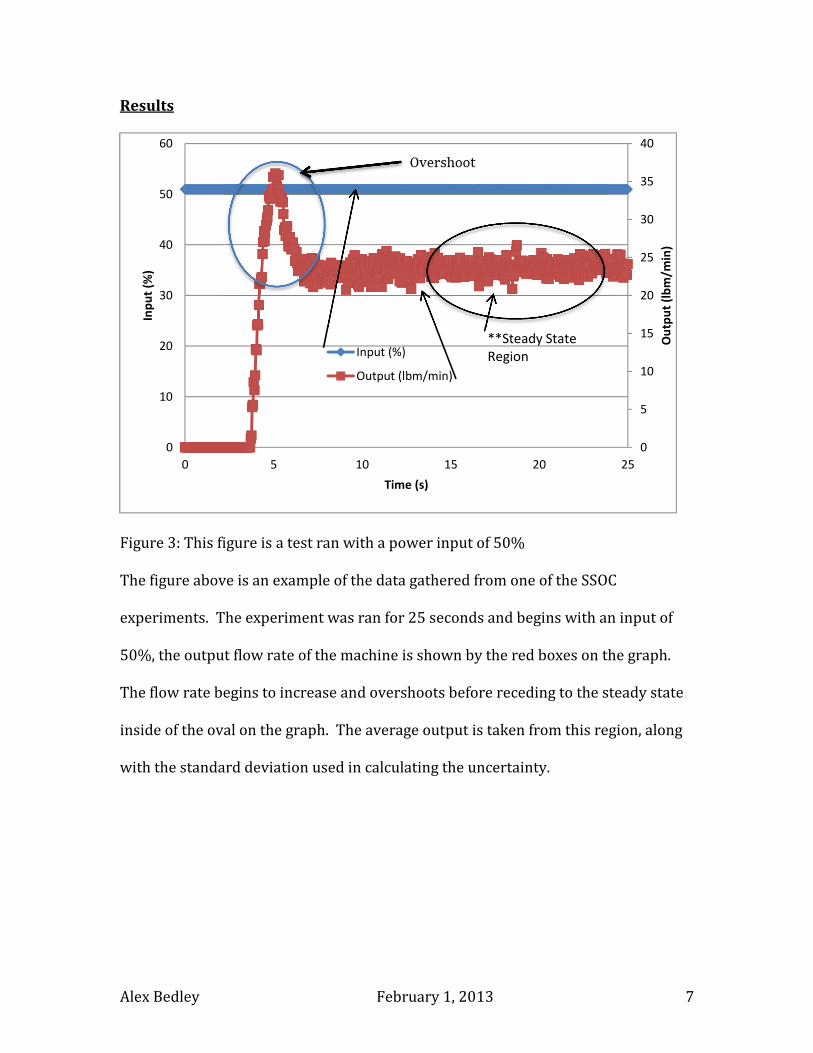
Figure 3: This figure is a test ran with a power input of 50%
The figure above is an example of the data gathered from one of the SSOC
experiments. The experiment was ran for 25 seconds and begins with an input of
50%, the output flow rate of the machine is shown by the red boxes on the graph.
The flow rate begins to increase and overshoots before receding to the steady state
inside of the oval on the graph. The average output is taken from this region, along
with the standard deviation used in calculating the uncertainty.
0
5
10
15
20
25
30
35
40
0
10
20
30
40
50
60
0 5 10 15 20 25
Ou
tpu
t (l
bm
/min
)
Inp
ut
(%)
Time (s)
Input (%)
Output (lbm/min)
**Steady State
Region
Alex Bedley February 1, 2013 8
Input (%)
Output
(lbm/min) Uncertainty
45 19.9 1.8
46 20.5 1.7
47 21 1.8
49 22.4 1.7
50 23 2.23
51 23.7 1.8
53 25 1.8
55 26.30 1.8
57 27.50 1.9
59 28.80 1.8
60 29.50 1.8
61 30.10 1.7
63 31.40 1.8
66 33.30 1.8
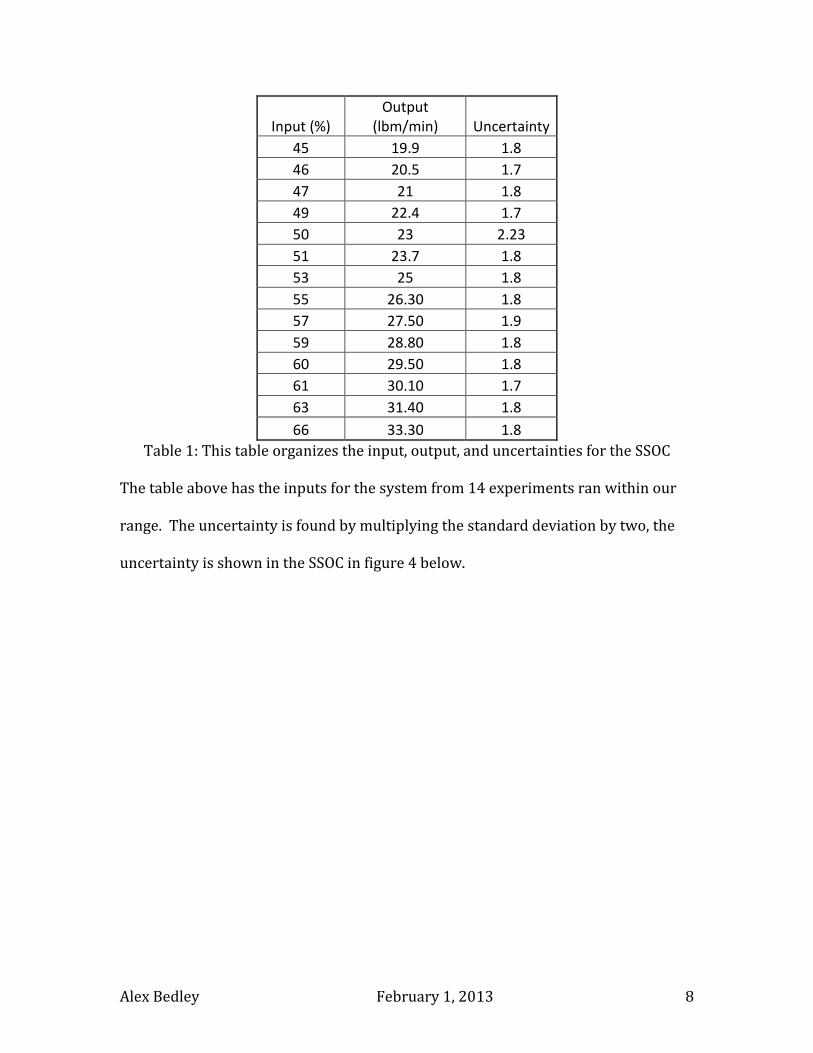
Table 1: This table organizes the input, output, and uncertainties for the SSOC
The table above has the inputs for the system from 14 experiments ran within our
range. The uncertainty is found by multiplying the standard deviation by two, the
uncertainty is shown in the SSOC in figure 4 below.
Alex Bedley February 1, 2013 9
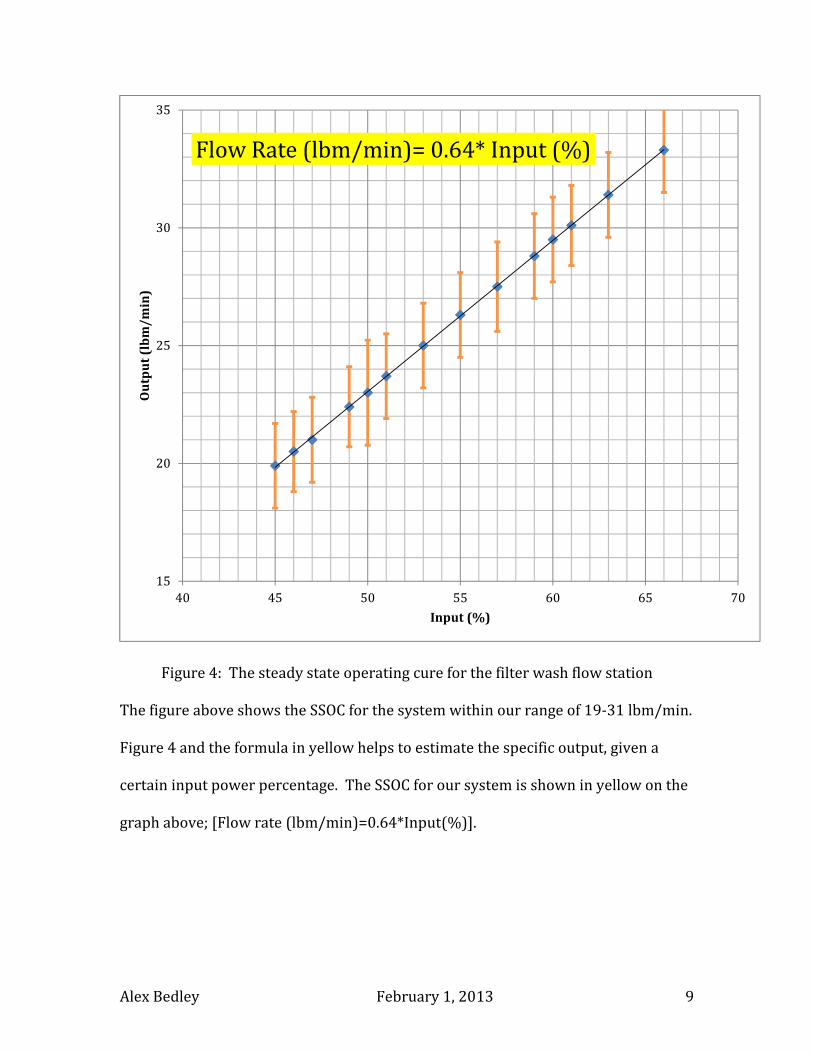
Figure 4: The steady state operating cure for the filter wash flow station
The figure above shows the SSOC for the system within our range of 19-31 lbm/min.
Figure 4 and the formula in yellow helps to estimate the specific output, given a
certain input power percentage. The SSOC for our system is shown in yellow on the
graph above; [Flow rate (lbm/min)=0.64*Input(%)].
Flow Rate (lbm/min)= 0.64* Input (%)
15
20
25
30
35
40 45 50 55 60 65 70
Ou
tpu
t (l
bm
/m
in)
Input (%)
Alex Bedley February 1, 2013 10
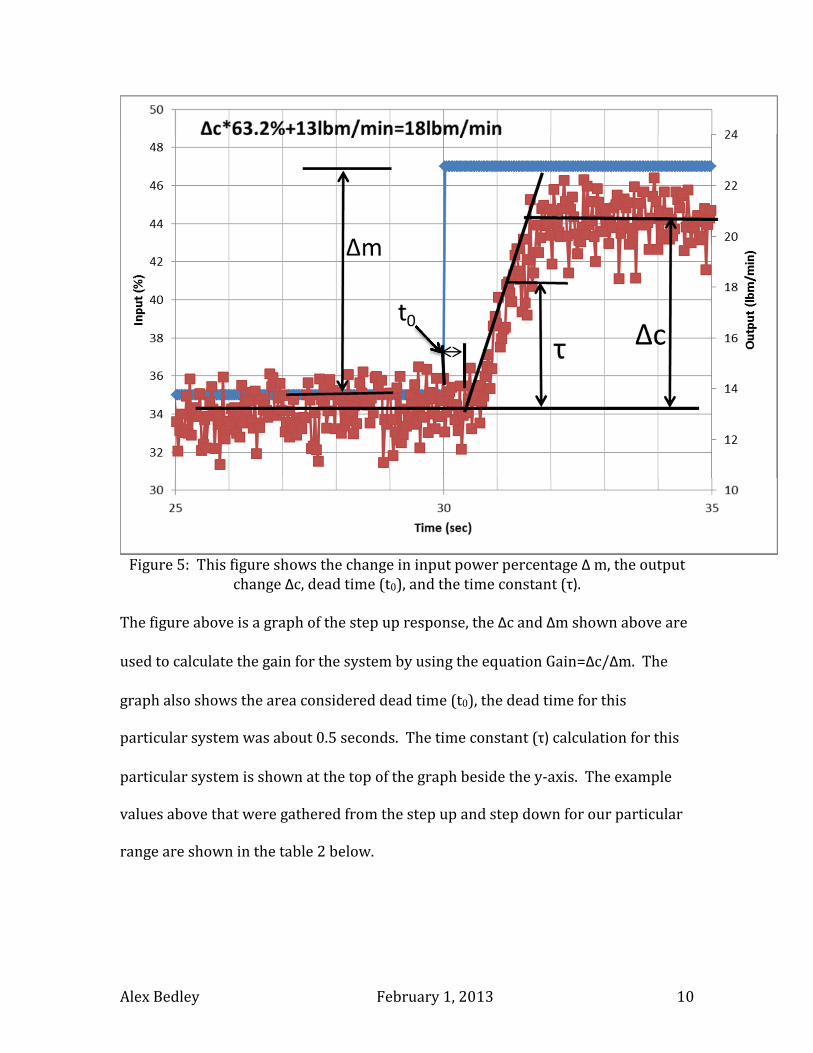
Figure 5: This figure shows the change in input power percentage Δ m, the output
change Δc, dead time (t0), and the time constant (τ).
The figure above is a graph of the step up response, the Δc and Δm shown above are
used to calculate the gain for the system by using the equation Gain=Δc/Δm. The
graph also shows the area considered dead time (t0), the dead time for this
particular system was about 0.5 seconds. The time constant (τ) calculation for this
particular system is shown at the top of the graph beside the y-axis. The example
values above that were gathered from the step up and step down for our particular
range are shown in the table 2 below.

Alex Bedley February 1, 2013 11
Regions Gain up Gain down τ up τ down t0 up t0 down
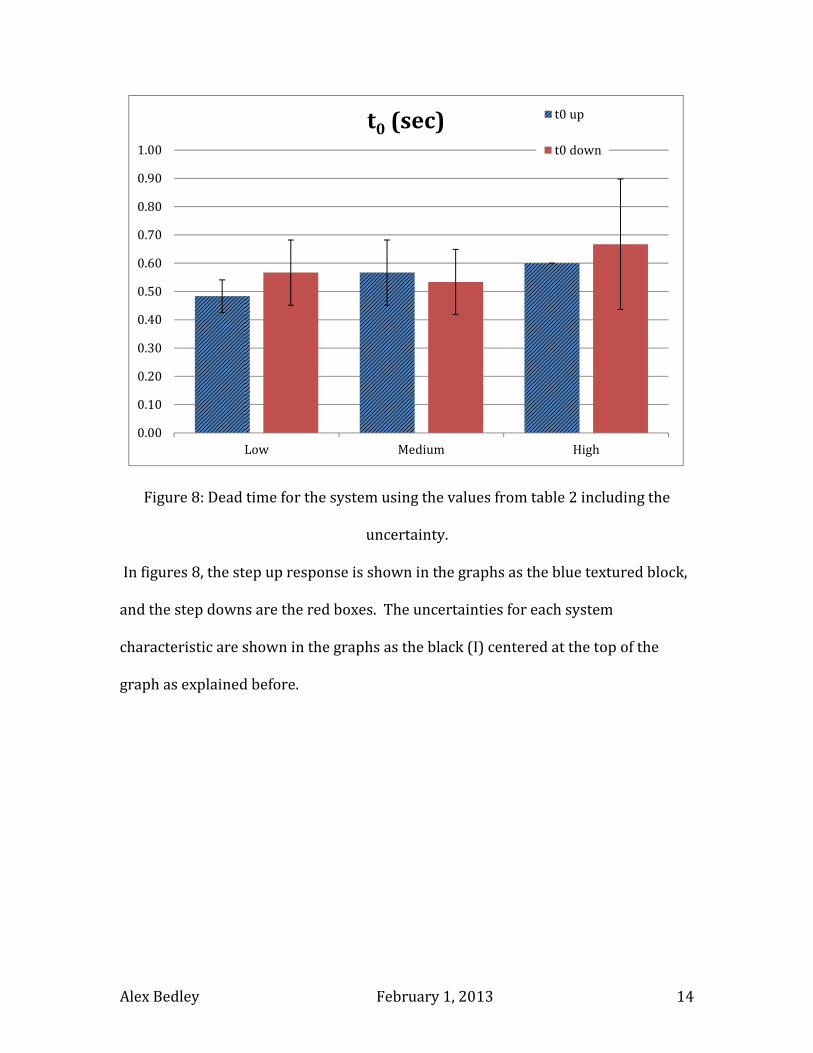
Low 0.62 0.71 0.83 0.87 0.48 0.57
Medium 0.66 0.63 0.80 0.87 0.57 0.53
High 0.63 0.67 0.77 0.53 0.60 0.67
Uncertainty Gain up Gain down τ up τ down t0 up t0 down
Low 0.09 0.01 0.12 0.12 0.06 0.12
Medium 0.02 0.04 0.20 0.12 0.12 0.12
High 0.12 0.12 0.12 0.23 0.00 0.23
Table 2: Values gathered for gain, time constant, and dead time.
This table is a list of averages for each team member for the gain, time constant and
dead time. The uncertainties for each of the characteristics of the step response are
located in the lower set of tables. These uncertainties are used in the following
figures as (I) shaped bars centered on the top of each colored or textured bar.

Alex Bedley February 1, 2013 12
Figure 6: Gain for the system using the values from table 2 including the uncertainty.
In figures 6, the step up response is shown in the graphs as the blue textured block,
and the step downs are the red boxes. The uncertainties for each system
characteristic are shown in the graphs as the black (I) centered at the top of the
graph as explained before.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
Low Medium High
Gain (lbm/min/%) Gain up
Gain down

Alex Bedley February 1, 2013 13
Figure 7: Time constant for the system using the values from table 2 including the
uncertainty.
In figures 7, the step up response is shown in the graphs as the blue textured block,
and the step downs are the red boxes. The uncertainties for each system
characteristic are shown in the graphs as the black (I) centered at the top of the
graph as explained before.
0.00
0.20
0.40
0.60
0.80
1.00
1.20
Low Medium High
τ (sec) τ up
τ down
Alex Bedley February 1, 2013 14
Figure 8: Dead time for the system using the values from table 2 including the
uncertainty.
In figures 8, the step up response is shown in the graphs as the blue textured block,
and the step downs are the red boxes. The uncertainties for each system
characteristic are shown in the graphs as the black (I) centered at the top of the
graph as explained before.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
Low Medium High
t0 (sec) t0 up
t0 down

Alex Bedley February 1, 2013 15
Discussion
In the first experiment, the steady state operating curve showed that the flow rate
was 0.64*Input (%). For the output range that we were trying to fall within, the
required motor input was between 45-66%. For the flow station, the SSOC shows
that the system is very linear and consistent; this mathematical model gives fairly
accurate results when trying to predict the output for the system when specifying
the input.
In the step response experiment, the results throughout the output range of 19-31
lbm/min, the gains, time constant, and dead time for the system are pretty
consistent from low range to the high range with the uncertainty bars for each set of
data almost falling within the range of the other values for the system characteristic.
The average gain for the system was 0.65 which is very similar to the constant value
of 0.64 obtained in the steady state operating curve. The dead time and time
constant for the system averaged around 0.8 seconds and 0.55 seconds respectively.
The uncertainties were slightly larger in the higher end of our range except for the
step up dead time.
Alex Bedley February 1, 2013 16
Conclusions and Recommendations
The objective of the experiment was to create a steady state operating curve for the
filter wash flow control system with outputs of 27-31 lbm/min with both valves
closed for the entire experiment, and to study three system characteristics for a step
response. The inputs for the system were manipulated in order to control what the
output for the system. The linear fit for the SSOC became Flow rate
(lbm/min)=0.64(lbm/min/%)*Input(%). The linear fit slope of the steady state
operating curve was within a hundredth of the average gain from the step response.
The time constant and dead times throughout the system were similar within the
high, medium, and low sections of our output range. The experiments ran well, the
system took a few experiments to warm up and give consistent data; overall the
system provided usable data.
Alex Bedley February 1, 2013 17
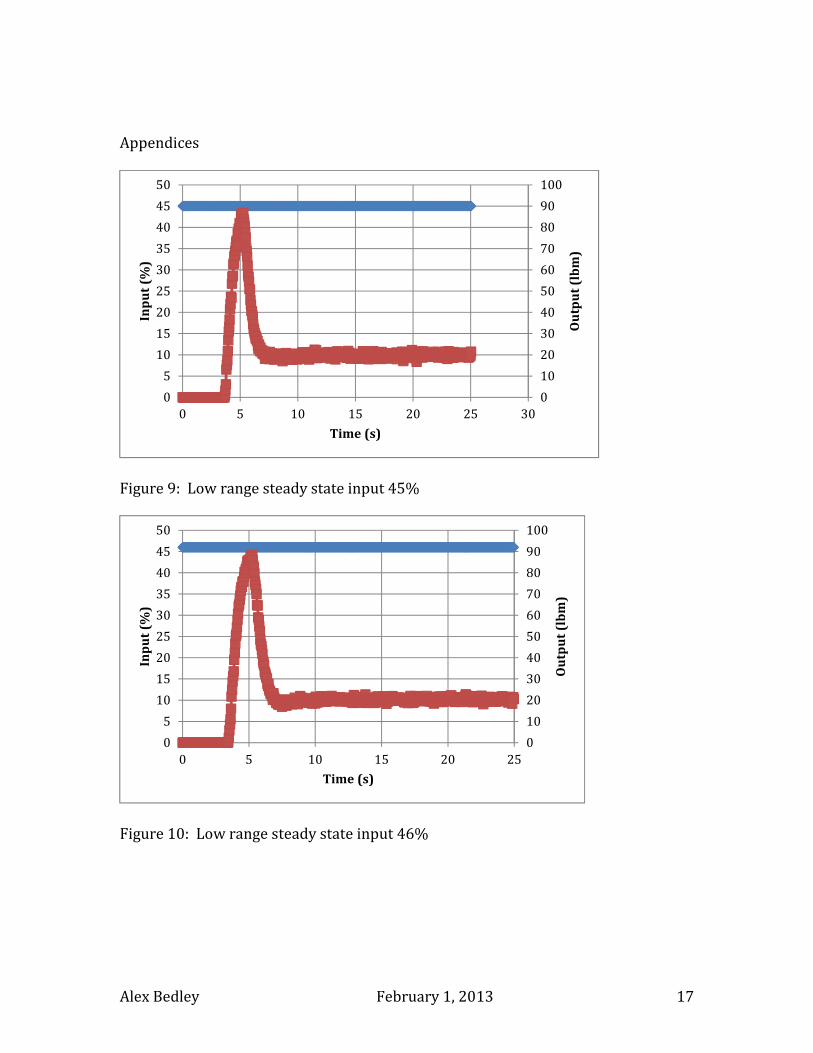
Appendices
Figure 9: Low range steady state input 45%
Figure 10: Low range steady state input 46%
0
10
20
30
40
50
60
70
80
90
100
0
5
10
15
20
25
30
35
40
45
50
0 5 10 15 20 25 30
Ou
tpu
t (l
bm
)
Inp
ut
(%)
Time (s)
0
10
20
30
40
50
60
70
80
90
100
0
5
10
15
20
25
30
35
40
45
50
0 5 10 15 20 25
Ou
tpu
t (l
bm
)
Inp
ut
(%)
Time (s)

Alex Bedley February 1, 2013 18
Figure 11: Low range steady state input 46%
Figure 12: Mid range steady state input 49%
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
45
50
0 5 10 15 20 25
Ou
tpu
t (l
bm
)
Inp
ut
(%)
Time (s)
0
10
20
30
40
50
60
70
80
90
0
10
20
30
40
50
60
0 5 10 15 20 25
Ou
tpu
t (l
bm
)
Inp
ut
(%)
Time (s)
Alex Bedley February 1, 2013 19
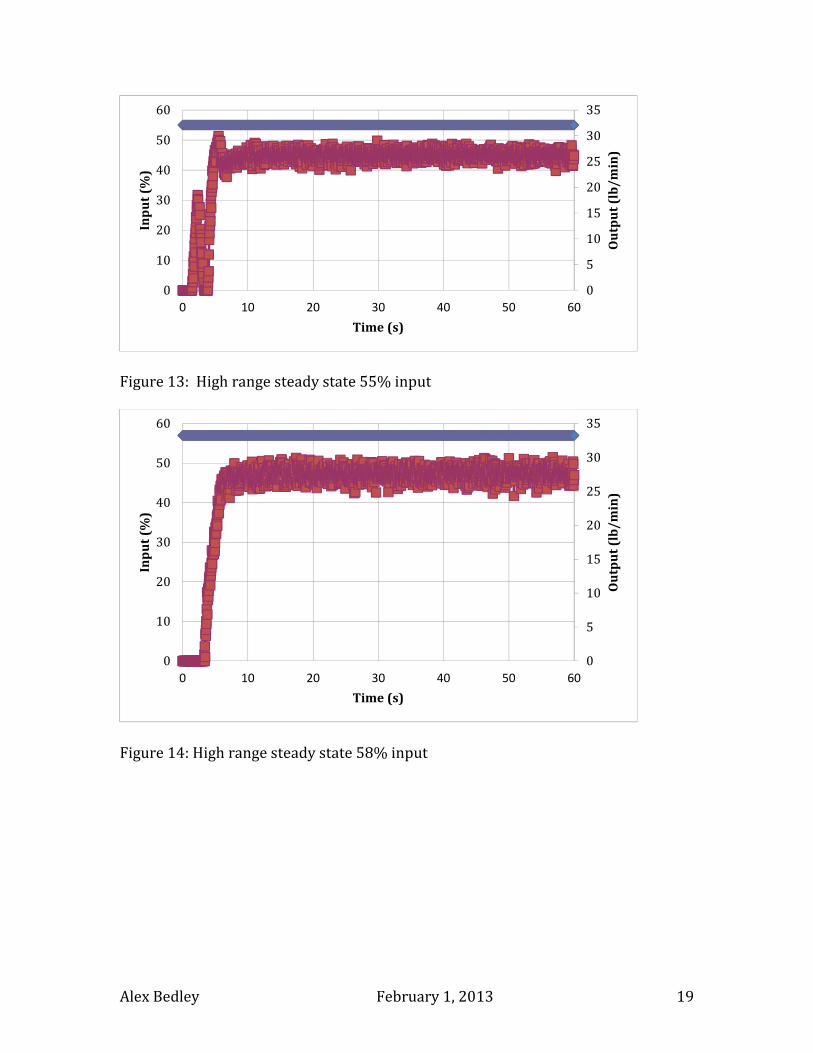
Figure 13: High range steady state 55% input
Figure 14: High range steady state 58% input
0
5
10
15
20
25
30
35
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)
0
5
10
15
20
25
30
35
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)

Alex Bedley February 1, 2013 20
Figure 15: High range steady state 60% input
Figure 16: High range steady state 61% input
0
5
10
15
20
25
30
35
40
45
50
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)
0
5
10
15
20
25
30
35
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)

Alex Bedley February 1, 2013 21
Figure 17: High range steady state input 61%
Figure 18: High range steady state 63% input
0
10
20
30
40
50
60
70
80
90
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)
0
5
10
15
20
25
30
35
40
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)
Alex Bedley February 1, 2013 22
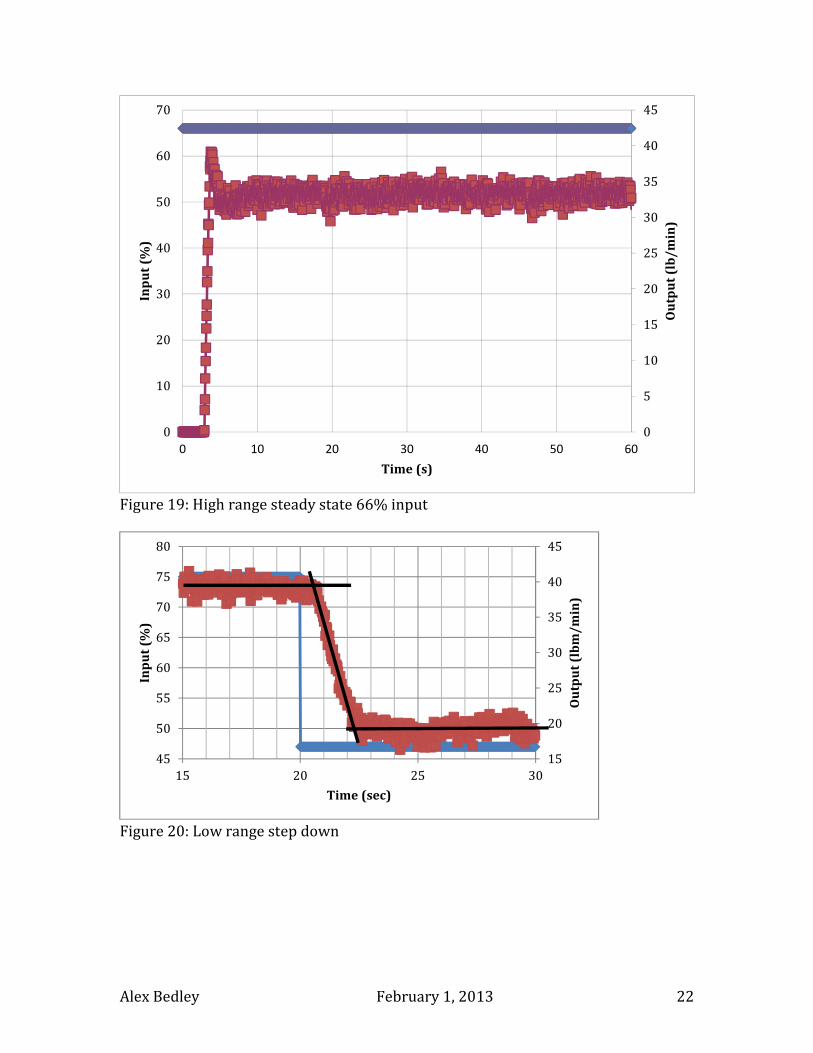
Figure 19: High range steady state 66% input
Figure 20: Low range step down
0
5
10
15
20
25
30
35
40
45
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Ou
tpu
t (l
b/
min
)
Inp
ut
(%)
Time (s)
15
20
25
30
35
40
45
45
50
55
60
65
70
75
80
15 20 25 30
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)

Alex Bedley February 1, 2013 23
Figure 21: Low range step down
Figure 22: Low range step down
15
20
25
30
35
40
45
45
50
55
60
65
70
75
80
15 20 25 30
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)
15
20
25
30
35
40
45
45
50
55
60
65
70
75
80
15 20 25 30
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)
Alex Bedley February 1, 2013 24
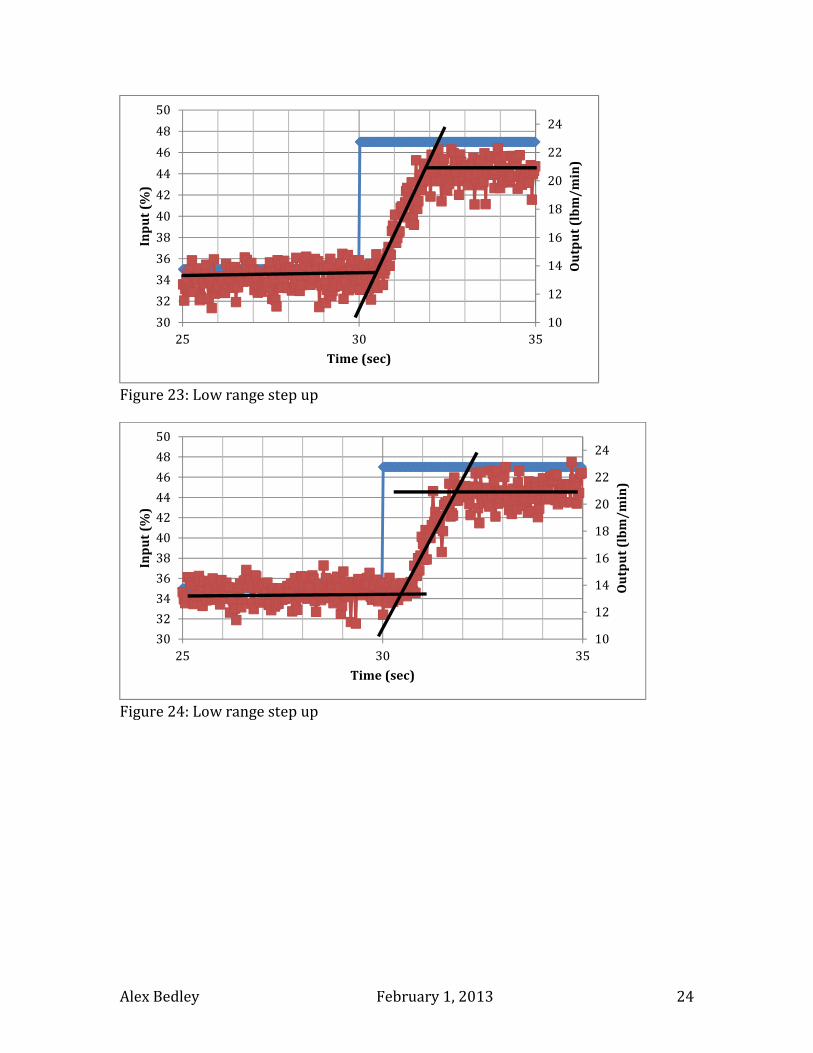
Figure 23: Low range step up
Figure 24: Low range step up
10
12
14
16
18
20
22
24
30
32
34
36
38
40
42
44
46
48
50
25 30 35
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)
10
12
14
16
18
20
22
24
30
32
34
36
38
40
42
44
46
48
50
25 30 35
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)
Alex Bedley February 1, 2013 25
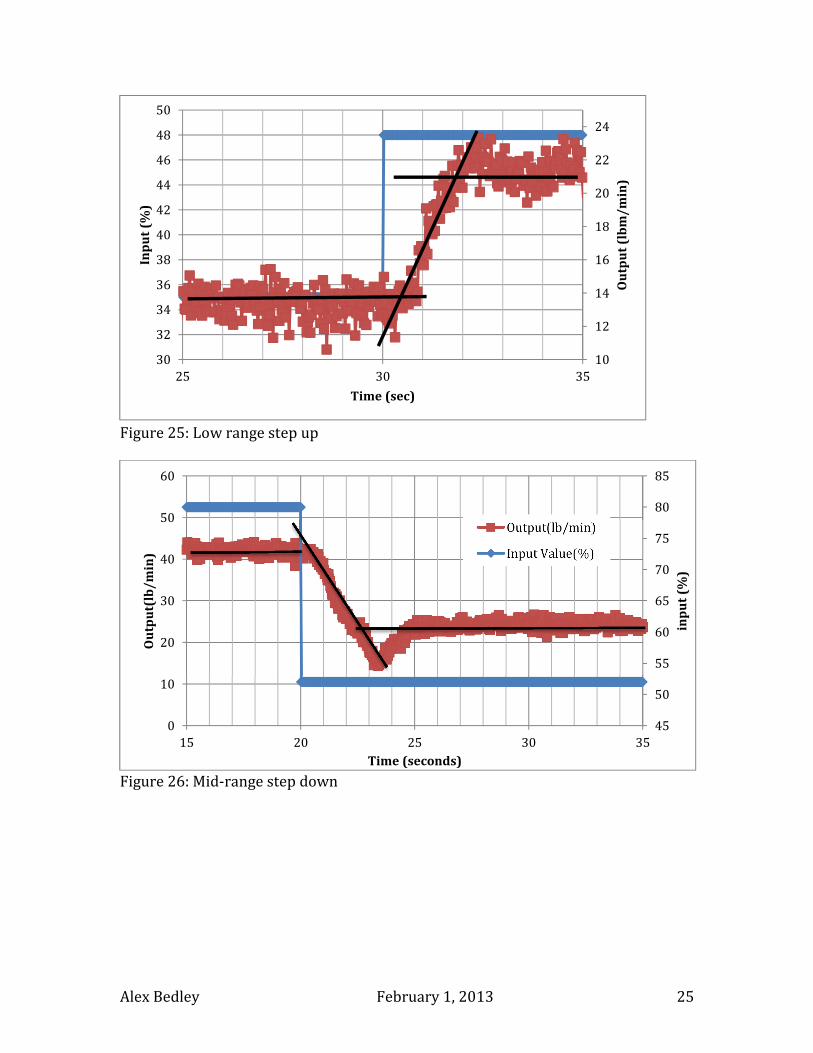
Figure 25: Low range step up
Figure 26: Mid-range step down
10
12
14
16
18
20
22
24
30
32
34
36
38
40
42
44
46
48
50
25 30 35
Ou
tpu
t (l
bm
/m
in)
Inp
ut
(%)
Time (sec)
45
50
55
60
65
70
75
80
85
0
10
20
30
40
50
60
15 20 25 30 35
inp
ut
(%)
Ou
tpu
t(lb
/m
in)
Time (seconds)
Output(lb/min)
Input Value(%)
Alex Bedley February 1, 2013 26
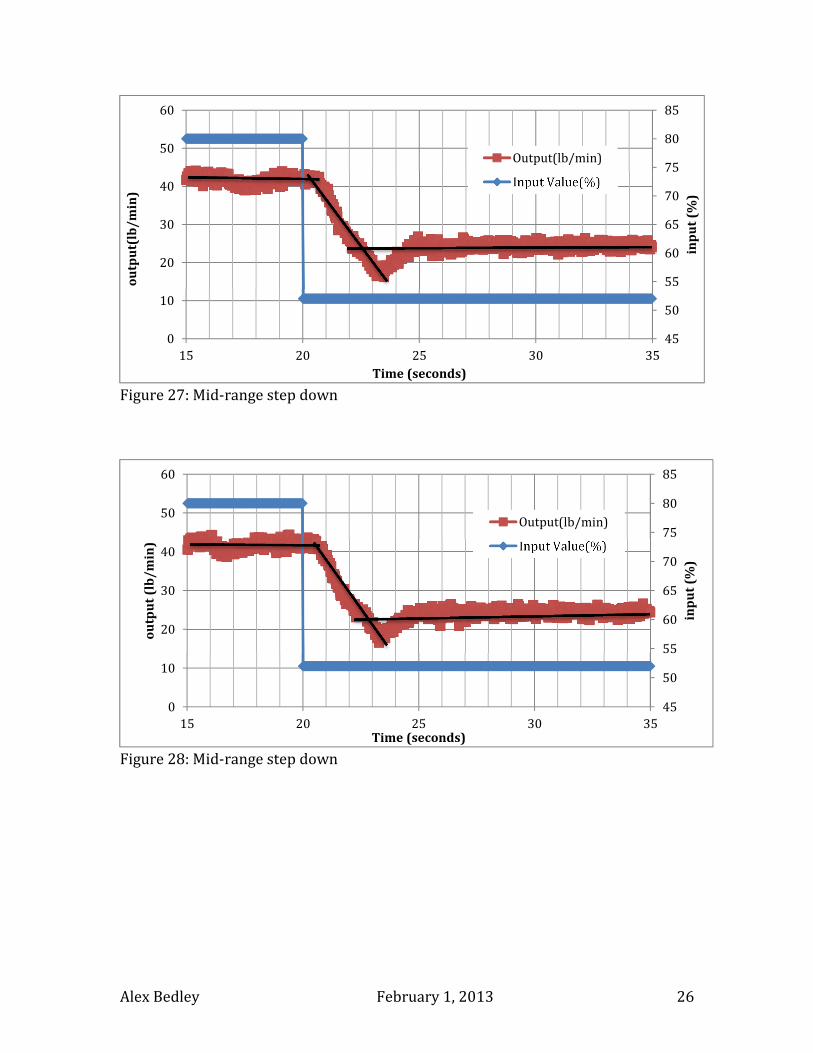
Figure 27: Mid-range step down
Figure 28: Mid-range step down
45
50
55
60
65
70
75
80
85
0
10
20
30
40
50
60
15 20 25 30 35
inp
ut
(%)
ou
tpu
t(lb
/m
in)
Time (seconds)
Output(lb/min)
Input Value(%)
45
50
55
60
65
70
75
80
85
0
10
20
30
40
50
60
15 20 25 30 35
inp
ut
(%)
ou
tpu
t (l
b/
min
)
Time (seconds)
Output(lb/min)
Input Value(%)
Alex Bedley February 1, 2013 27
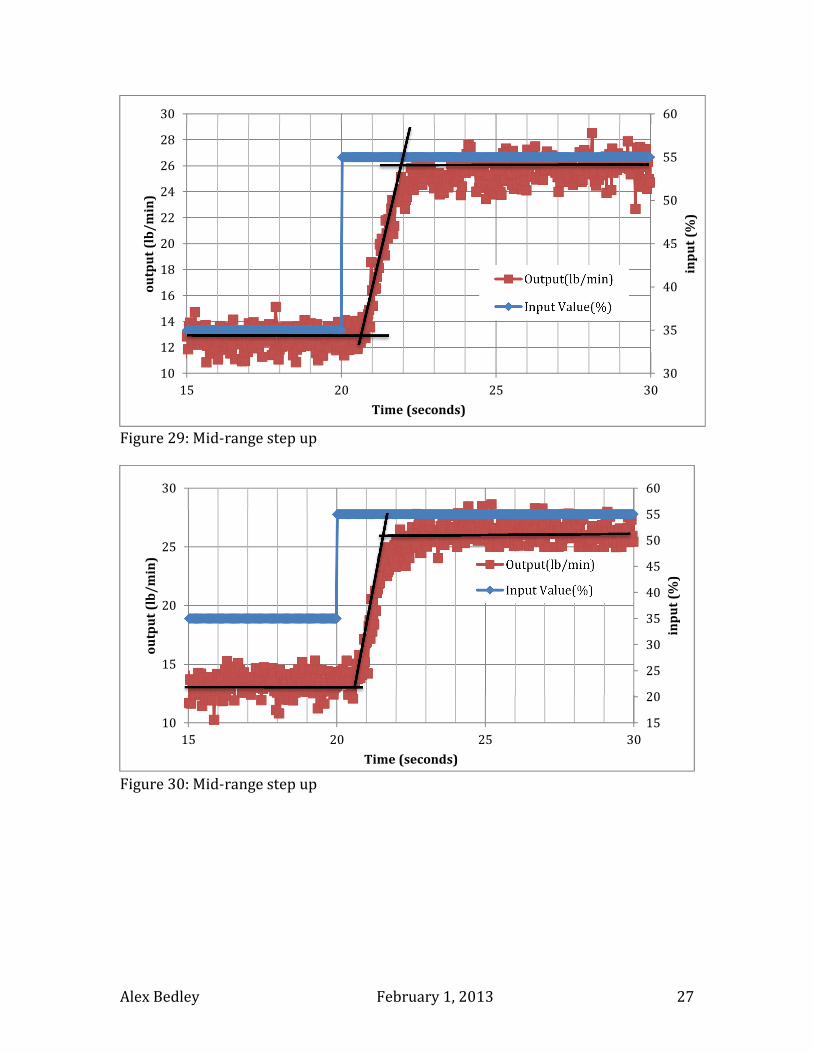
Figure 29: Mid-range step up
Figure 30: Mid-range step up
30
35
40
45
50
55
60
10
12
14
16
18
20
22
24
26
28
30
15 20 25 30
inp
ut
(%)
ou
tpu
t (l
b/
min
)
Time (seconds)
Output(lb/min)
Input Value(%)
15
20
25
30
35
40
45
50
55
60
10
15
20
25
30
15 20 25 30
inp
ut
(%)
ou
tpu
t (l
b/
min
)
Time (seconds)
Output(lb/min)
Input Value(%)
Alex Bedley February 1, 2013 28
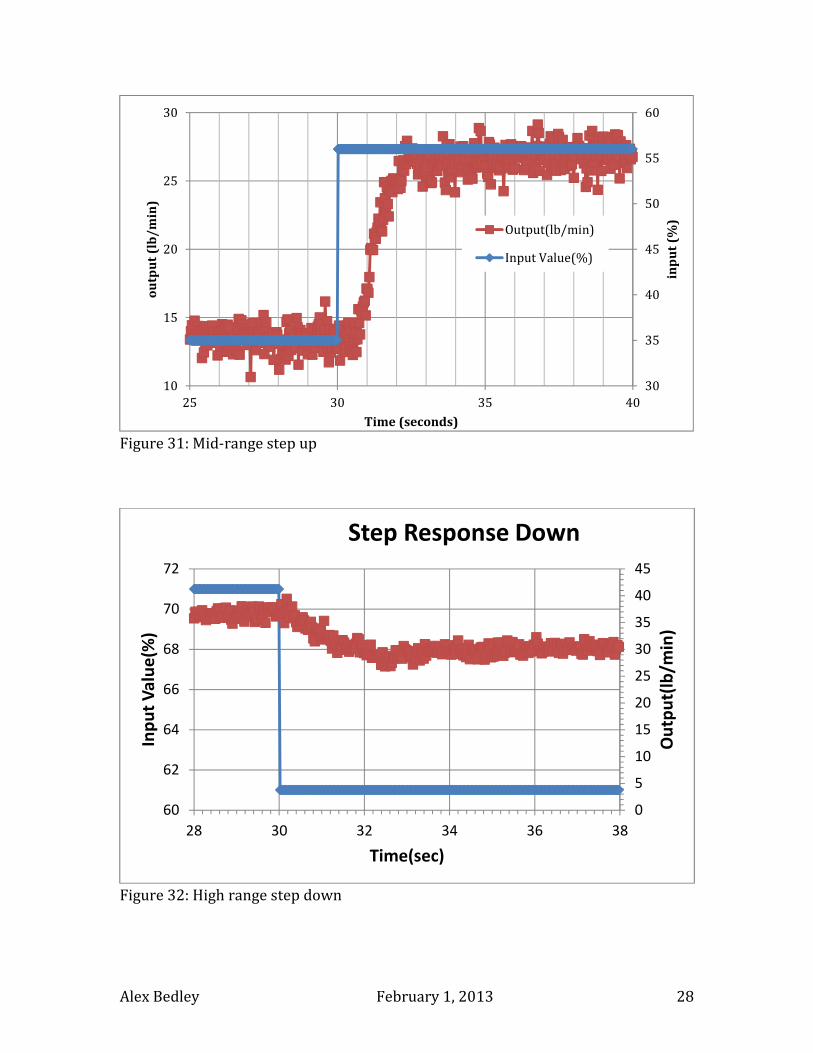
Figure 31: Mid-range step up
Figure 32: High range step down
30
35
40
45
50
55
60
10
15
20
25
30
25 30 35 40
inp
ut
(%)
ou
tpu
t (l
b/
min
)
Time (seconds)
Output(lb/min)
Input Value(%)
0
5
10
15
20
25
30
35
40
45
60
62
64
66
68
70
72
28 30 32 34 36 38
Ou
tpu
t(lb
/min
)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Down
Alex Bedley February 1, 2013 29
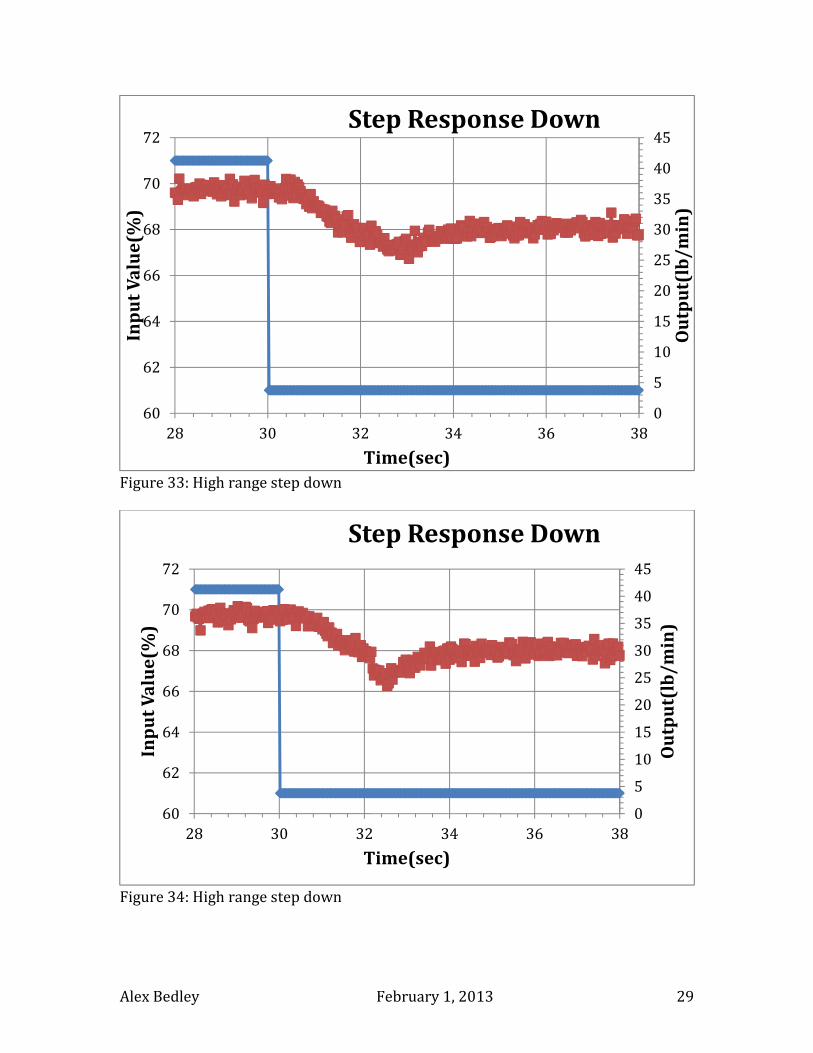
Figure 33: High range step down
Figure 34: High range step down
0
5
10
15
20
25
30
35
40
45
60
62
64
66
68
70
72
28 30 32 34 36 38
Ou
tpu
t(lb
/m
in)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Down
0
5
10
15
20
25
30
35
40
45
60
62
64
66
68
70
72
28 30 32 34 36 38
Ou
tpu
t(lb
/m
in)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Down
Alex Bedley February 1, 2013 30
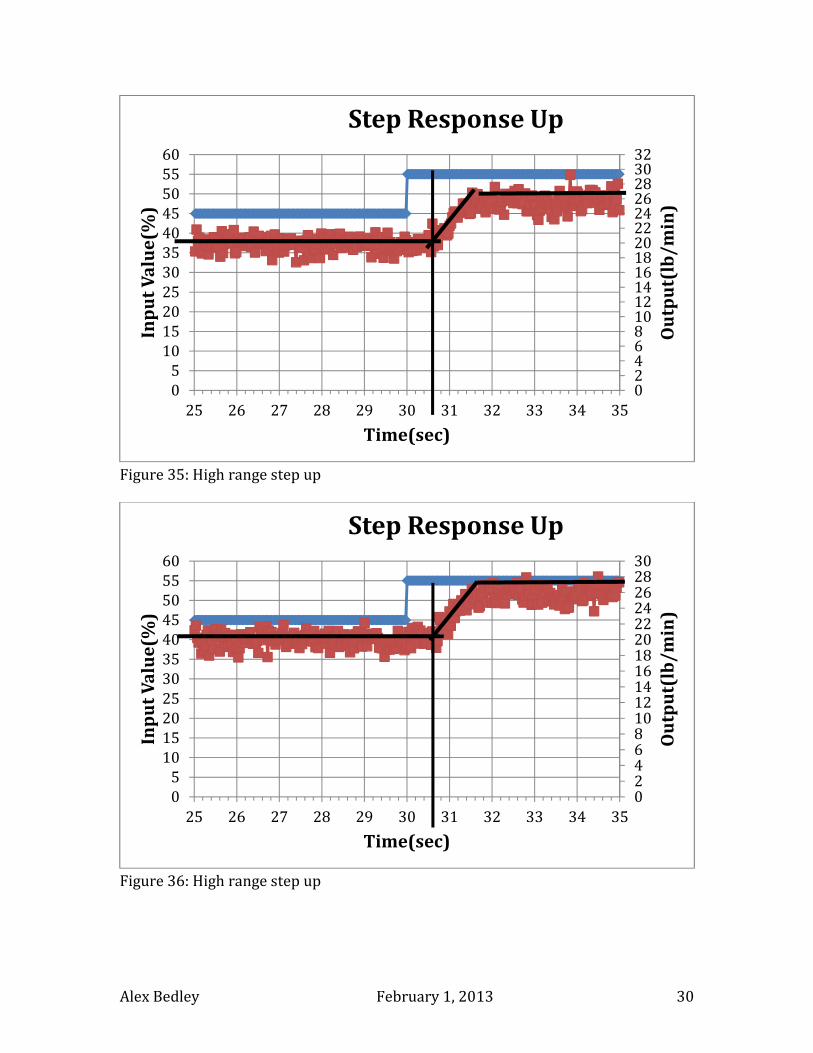
Figure 35: High range step up
Figure 36: High range step up
02468101214161820222426283032
0
5
10
15
20
25
30
35
40
45
50
55
60
25 26 27 28 29 30 31 32 33 34 35
Ou
tpu
t(lb
/m
in)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Up
024681012141618202224262830
0
5
10
15
20
25
30
35
40
45
50
55
60
25 26 27 28 29 30 31 32 33 34 35
Ou
tpu
t(lb
/m
in)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Up
Alex Bedley February 1, 2013 31
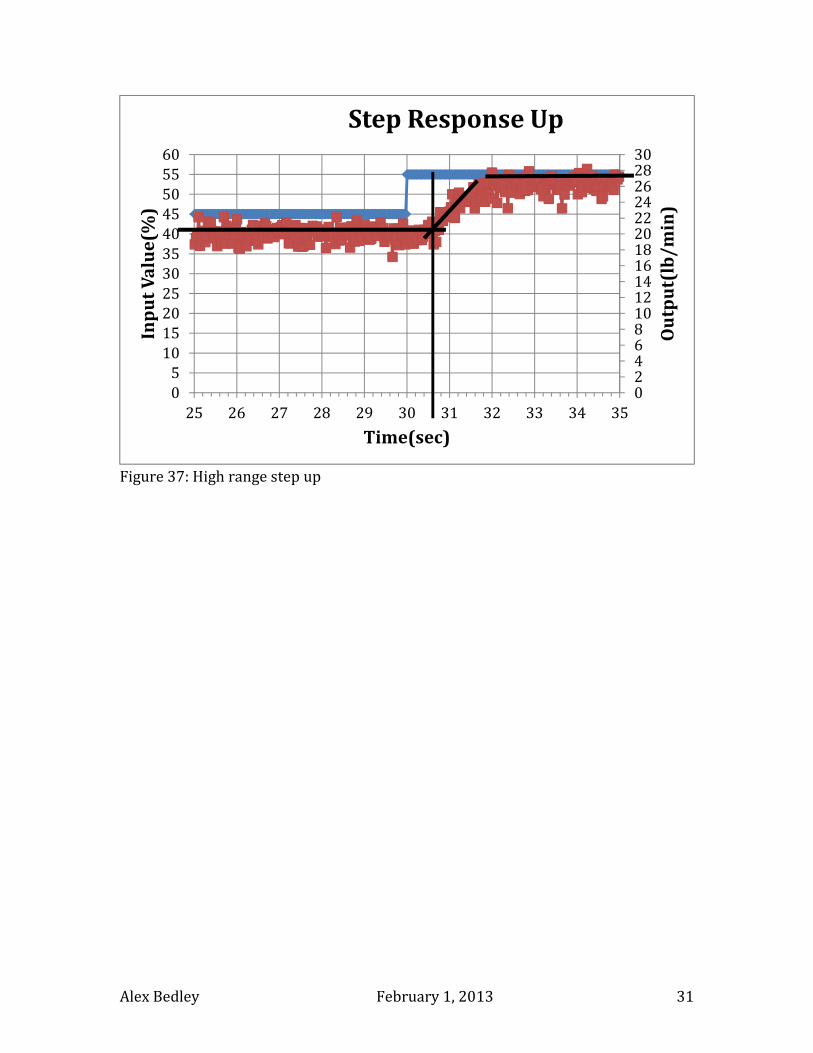
Figure 37: High range step up
024681012141618202224262830
0
5
10
15
20
25
30
35
40
45
50
55
60
25 26 27 28 29 30 31 32 33 34 35
Ou
tpu
t(lb
/m
in)
Inp
ut
Va
lue
(%)
Time(sec)
Step Response Up