Status January 2014 - ETSI
24
Infrastructural Message Sets St d di ti t CEN d ISO Standardization at CEN and ISO Status January 2014 Paul Spaandermann, TNO, NL
Transcript of Status January 2014 - ETSI

Infrastructural Message SetsSt d di ti t CEN d ISOStandardization at CEN and ISOStatus January 2014
Paul Spaandermann, TNO, NL

Page 1 By Paul Spaanderman (TNO, NL)
Infrastructural Message Sets
SIGNAL. PHASE AND TIMING (SPAT)ROAD TOPOLOGY (MAP)ROAD TOPOLOGY (MAP)PRIORITY AND PRE-EMPTION (SRM, SSM)
PROBE VEHICLE DATA (PVD, PDM)
IN VEHICLE INFORMATION (IVI)

Page 2 By Paul Spaanderman (TNO, NL)
SIGNAL. PHASE AND TIMING (SPAT)ROAD TOPOLOGY (MAP)ROAD TOPOLOGY (MAP)PRIORITY AND PRE-EMPTION (SRM, SSM)
4. (DT8.1 IN CEN/TC278/WG16 & ISO/TC204/WG18)1

Page 3 By Paul Spaanderman (TNO, NL)
SPAT, MAP, SRM and SSM
Wh t i th ?9091
What is the purpose?To inform vehicles about road situations in terms of road topologies as well as traffic management related information such as traffic light status and to provide special vehicles prioritized access atO
TS
1
light status and to provide special vehicles prioritized access at specific road segments to improve traffic safety and efficiency.
What is the expectation?For Road Operators to be able to more fluently manage the trafficE
N IS
O
For Road Operators to be able to more fluently manage the traffic flow and thereby the traffic throughput of the network and improve safety.For the Road Users to get though traffic more efficiently and safely.A
P,
SM
CE
For the Road Users to get though traffic more efficiently and safely. Get informed better and in advance for traffic light status in the car.For Fleet Operators such as busses, trucks and emergency vehiclesto request priority passage and for efficiency and reliability of public AT
, MA
RM
, SS
transport and freight management.To support the Basis Set of Applications (BSA)SP
ASR

Page 4 By Paul Spaanderman (TNO, NL)
What is MAP?9091
The MAP message defines the topology of an infrastructure area. It includes all the roads for vehicles, public transpor-O
TS
1
, p ptation and the paths for pedestrian crossings. The area described coversabout 200 m of the approaches startingE
N IS
O
about 200 m of the approaches, starting from the position of the stop line. If a neighbor intersection is closer than 400 t th MAP d i tiA
P,
SM
CE
400 meters, the MAP description may be done up to an extent of approximately the half distance between AT
, MA
RM
, SS
the intersections.SPA
SR

Page 5 By Paul Spaanderman (TNO, NL)
What is SPAT?The SPAT message defines the status of the signals in an 90
91
intersection. The status information includes general operational states of the traffic controller, the current signal state, the residual time of the state before changing in to the next state, the right of way O
TS
1
g g g yor each allowed maneuver and assistance for crossing the conflict area of. Additionally SPAT mayE
N IS
O
Additionally SPAT may include detailed green way advisory information
d th t t f bliAP,
SM
C
E
and the status for public transport prioritization.
AT, M
AR
M, S
SSP
ASR

Page 6 By Paul Spaanderman (TNO, NL)
SituationJoint Work Item (WI) established at CEN/TC278/WG16 & ISO/TC204/WG18 as part of the M/453 activities.90
91
2 activities are established:The creation of the CEN ISO TS 19091 specifying the messages, related message structures and data elements of SPAT, MAP, SSM and SRMO
TS
1
and SRM.To ensure that required application requirements are met an intensive application overview was created and is included as informative reference.As there are differences between the different regions (Europe, NorthE
N IS
O
As there are differences between the different regions (Europe, North America, Asia-Pacific) it is expected that there will be different profiles to allow choice for the specific situations or regions.Besides SPAT and MAP, for priority and pre-emption support at intersections the message types Single Request Message (SRM) and Signal StatusAP,
SM
C
E
the message types Single Request Message (SRM) and Signal Status Message (SSM) will be defined.
Liaison with SAE: Strong support from CEN and ISO since Dec 2012 to modify SAE J2735 to meet apparent needs for immediate AT
, MA
RM
, SS
y ppdeployment based of trials conducted to date and to harmonize the message sets.SP
ASR

Page 7 By Paul Spaanderman (TNO, NL)
CEN ISO TS 19091 (VA/CEN lead)Document structure at current thinking90
91
Document structure at current thinkingIntroductionReference to revised SAE SPaT & MAP messages (Normative)
Mechanism to allow regional teams to add new elements and the newO T
S 1
Mechanism to allow regional teams to add new elements and the new elements should be informed to other regional teams, for potential inclusion to the baseline future release if suited.
Annex A (Informative): App use cases & traceabilityEN
ISO
Regional AnnexesWhich elements are required/optionalNew elements that are not yet included in the SAE J2735 SPaT & MAP b liAP,
SM
C
E
baselineAnnex B (Normative) – EU Annex C (Normative) – JPNA D (N ti ) USAT
, MA
RM
, SS
Annex D (Normative) – USAnnex X (Normative) – Korea, Australia, etc.SP
ASR

Page 8 By Paul Spaanderman (TNO, NL)
StatusCEN ISO TS 19091 related90
91
A draft version is available for internal evaluation at WG level The regions related content to be addedAdditional requirements to be identified
O T
S 1
Data concepts investigatedInvestigate what is needed for SSM/SRM Comments received from Korea, Japan and Europe to be resolvedE
N IS
O
Document to be restructuredNext step: TC review in Q3/2014
SAE J2735 relatedAP,
SM
C
E
A update proposal for the J2735 has been realized. This incorporates significant changes and added element aspects as requested by Europe, Japan and Korea so far. This proposal is now for balloting to SAEAT
, MA
RM
, SS
SAE.
SPA
SR

Page 9 By Paul Spaanderman (TNO, NL)
PROBE VEHICLE DATA (PVD) ANDPROBE DATA MANAGEMENT (PDM)PROBE DATA MANAGEMENT (PDM)
(DT8 2 IN CEN/TC278/WG16 & ISO/TC204/WG18)4.
(DT8.2 IN CEN/TC278/WG16 & ISO/TC204/WG18)
1

Page 10 By Paul Spaanderman (TNO, NL)
Probe Vehicle DataCEN ISO TS xxxxx “Functional Characteristics of Probe Data
age
exchange”
What is the purpose?ary
sta
Provide operators with vehicle collected general specific but none individual
information related to road safety, road throughput and reduction of CO2
emissions.relim
ina
emissions.
What is the expectation?For Road Operators to get better trustworthy information about the current
situation of traffic and the roads to avoid accidents manage vehicle density
Pr
situation of traffic and the roads to avoid accidents, manage vehicle density
and road throughput, road quality and notify on weather conditions.
For the Road User to be better prepared for hazardous situation on the road
VD,
DM
like for black ice situations realizing less accidents, providing better time
prediction (arriving at destination) and less fuel consumption. PV PD

Page 11 By Paul Spaanderman (TNO, NL)
The European contextage
The European contextIt is specified for day-1 applications that vehicles shall provide most
relevant Road Operator real-time information by means of ary
sta
p y
awareness messages (CAM) as well as hazardous situation
information exchange supporting messages (DENM) to enable
relim
ina
notification of the different situations to others including Road
Operators.
R d O t h ill t b bl t i ll l t
Pr
Road Operators however will not be able to receive all relevant
messages at all locations along the roads. Probe Data will ensure
the acceptance of relevant information from locations the messages
VD,
DM p g
could not be received.PV PD

Page 12 By Paul Spaanderman (TNO, NL)
Why Probe-Data?
Vehicles delivery of bufferedage
Data when in RSU ITS-S reach
ary
sta
1 3relim
ina
2
Pr
RO i d V2V d t lik
RO’s cannot receive V2V data. Buffering needed
allowing data provisioning
2
VD,
DM
ROs can use received V2V data like CAM and DENM to improve traffic management
allowing data provisioning when in reach of R-ITS-SPV PD

Page 13 By Paul Spaanderman (TNO, NL)
Probe Data Outside Europeanag
e
Outside EuropeanProbe Data standards are developed within ISO/TC204/WG16. Additional knowledge shows that further improvement of these standards as well as creating new work-items are needed.ar
y st
a
Alignment of CEN/TC278/WG16 & ISO/TC204/WG18 and ISO/TC204/WG16 activities resulted in a cooperation agreement with shared responsibilities and cross WG contribution between the WG’s.
relim
ina
Project Editor WG16 WG18 Joint project
22837 Probe Data Sato-san R p yes
25114 Probe Data Management xxx2) p R yes
29284 Event Based Probe Data Sato-san R p yes
Pr
NWI Probe data Service Architecture Ito-san,Sato-san
R no
24100 Personal data protection Sato-san,Ito-san
R p yes
NWI Functional Characteristics of Probe Data exchange
Paul Sp. p R yes
VD,
DM
NP 16461 Privacy and Integrity protection Ito-san R p yes
PV PD

Page 14 By Paul Spaanderman (TNO, NL)
Probe Data What can be expectedag
e
What can be expectedThe NWIP “Functional Characteristic of Probe Data exchange” will be approved by CEN/TC278 and ISO/TC204 in Q2/2014. The standard will be developed in 2014/2015ar
y st
a
standard will be developed in 2014/2015.Cooperation with the ISO/TC204/WG16 is on-going related to the other probe data projects in ISO.Harmonization with SAE J2735 will take place.re
limin
a
Harmonization with SAE J2735 will take place.Harmonization with ETSI TC ITS message sets is needed also.
Project Editor WG16 WG18 Joint project
22837 Probe Data Sato-san R p yes
Pr
25114 Probe Data Management xxx2) p R yes
29284 Event Based Probe Data Sato-san R p yes
NWI Probe data Service Architecture Ito-san,Sato-san
R no
24100 Personal data protection Sato-san,Ito-san
R p yes
NWI Functional Characteristics of Probe Data Paul Sp. p R yesVD,
DM
exchange p p y
NP 16461 Privacy and Integrity protection Ito-san R p yesPV PD

Page 15 By Paul Spaanderman (TNO, NL)
IN VEHICLE INFORMATION (IVI)
(DT8.3 IN CEN/TC278/WG16 & ISO/TC204/WG18)
4.
1

Page 16 By Paul Spaanderman (TNO, NL)
In Vehicle Information9321
What is the purpose?To inform the road user and vehicles about travel information and
O T
S 1
9
road signs such as currently situated at the roadside.What is the expectation?
For Road Operators to reduce the amount of signs along the roadEN
ISO
For Road Operators to reduce the amount of signs along the road, begin able to provide additional services like contextual speed and better manage traffic flow.F th R d U t t l i f d b t d i f ti h
CE
For the Road User to get only informed about road information when it is applicable to the situation this specific road user is in. Get more efficient and will less fuel consumption to the final destination.
IVI

Page 17 By Paul Spaanderman (TNO, NL)
Supported configurations of IVI
9321
Fixed signs (examples:)Mechanic (Rotating prism) VMS (Variable Message Signs)
O T
S 1
9
( g g )
(Light Emitting) VMS with various pictograms(Light Emitting) Text VMSE
N IS
O
(Light Emitting) Text VMS incl. Pictogram (optional)Full Matrix signs and
CE
mixed static & VMS signsCompliant with DATEX II approach (VMSCharacteristics/VMSMessage)IV
I

Page 18 By Paul Spaanderman (TNO, NL)
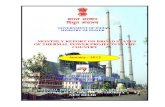
Structural Model9321
The IVI container represents the Application Data Unit to be transmitted and received by an ITS station (ITS-S). The container is composed by:
O T
S 1
9
One IVI Management sub-container. It is applicable to the entire IVI structure and is mandatory. It provides enough information to handle the IVI container.
One or more Location sub-containers.It describes the essential information for an application to understand where an IVI is relevant If one or moreE
N IS
O
IVI Structure
It describes the essential information for an application to understand where an IVI is relevant. If one or more Location containers is present in one IVI structure, all Containers carry the same content but are expressed in different forms.
One or more IVI Application sub-containers.
CE
IVI Structure
LocationIVI Management IVI ApplicationITS Common
Location Container(s)
IVI Management Container
IVI Application Containers(s)
ITS Common Header IV
I

Page 19 By Paul Spaanderman (TNO, NL)
Information ZonesThe IVI container represents the Application Data Unit. When an ITS-93
21
The IVI container represents the Application Data Unit. When an ITSS receives an IVI structure, the ITS-S is able to interpret the application information in the context of the appropriate location information. For this there are four zones defined:
1 Mi i di i ti (MDA) ( f t ISO 17425)O T
S 1
9
1. Minimum dissemination area (MDA) (refer to ISO 17425); 2. Detection zone;3. Driver awareness zone (DAZ) (refer to ISO 17425);4. Relevance zone (RZ).E
N IS
O
( )
CE
IVI

Page 20 By Paul Spaanderman (TNO, NL)
Information ZonesThe Location Container contains a definition of one or more zones93
21
The Location Container contains a definition of one or more zones, which can represent a detection zone, a relevance zone, or both.The application information in the Application Container is self-contained and refers to location information for its spatial validity
O T
S 1
9
contained and refers to location information for its spatial validity. Application information of the same type shall not refer to overlapping reference zones. Each Application Container refers to zones defined in the Location Container.
EN
ISO
CE
IVI

Page 21 By Paul Spaanderman (TNO, NL)
Document structure at current thinking9321 CEN ISO TS 19321 (VA/CEN lead)
Document structure at current thinkingNormative Structure & IVI Containers
IVI Management ContainerLocation Containers (Static, Dynamic)
O T
S 1
9
( , y )IVI Application Container (IVS, Text, Layout)
Normative Definition of content of Data Frames and Data ElementsNormative Definition of data syntax in ASN.1 Module
EN
ISO
yProfile for G5 communication (guidelines)Information on use cases (further input expected)Example of pictogram catalogue (input from stakeholders)
CE
Linked to CEN ISO TS 17425 Intelligent transport systems - Cooperative ITS – Data exchange specification for in-vehicle presentation of external road and traffic related data,and to CEN ISO TS 17426 Intelligent transport systems - Cooperative ITS –and to CEN ISO TS 17426 Intelligent transport systems Cooperative ITS Contextual speedsIV
I

Page 22 By Paul Spaanderman (TNO, NL)
St t9321
StatusFinal draft delivered for comments on WG levelTC review in Q2/2014
O T
S 1
9
The TS19321 references to the application specificationsTS 17425 for In Vehicle Signage (IVS) andTS 17426 for Contextual Speed.E
N IS
O
TS 17426 for Contextual Speed.In Europe at C2C-CC and Amsterdam Group this TS19321 is being evaluated for first deployment support.
CE
IVI

Thank YOUThank [email protected]