Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology

of 12
Transcript of Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
1/12
T E C H N I C A L P A P E R
Ultra high aspect-ratio MEMS and NEMS on basisof fibrous composite technology
Sergey Sukhoveyev
Received: 4 June 2007/ Accepted: 16 December 2007 / Published online: 8 January 2008
The Author(s) 2008
Abstract Indisputably, microelectronics is the mother
of the MEMS/NEMS technologies. Unfortunately, themajority of developed MEMS and NEMS devices inherited
from microelectronics technologies not only of merit but
also deficiencies one of which is their planarity. Recently
developed devices on the flexible base and also devices
with the moving elements on the hinges, in principle,
remain geometrically flat. With this micro- and nano-
mechanisms (motors, actuators, sensors, etc.) they are not
divided with the base (from silicon or another material)
large part of which (volume and mass) functionally is not
used and has usual of macro sizes (dimensions of a chip).
As a result, these ultra modern planar technologies are
helpless with the creation of powerful autonomous
3D-devices with the overall sizes *(110) mm3. The
author makes the attempt to estimate the prospects for
development and fabrication of topology complex 3D
MEMS/NEMS, for example, flaying microrobot and elastic
micro motor on the basis of fibrous compositesultra high
aspect-ratio glass structures with predetermined 3D micro-
and nano-topologies and embedded wires.
1 Fibrous composite mems/nems technology
The name of fiber technology came from the process of
product manufacture in fibrous composite. The fibers can
be polymeric, glass or other materials but today this tech-
nology uses glass. Fibrous MEMS/NEMS technologypreceded from micro channel plates the well known in
electronic industry as MCP. About 70% of the area of such
plates (thickness of*0.4 mm) is comprises of identical
cylindrical channels with a diameter from several units to
tens of micrometers. This process circumstance was used
for preparing the hyperfine vacuum-tight windows-filters of
soft X-ray for the SR beam-line (Chesnokov et al. 1991). In
this filter geometrically high transparent MCP performs the
role of the supporting structure.
There are other examples of non-traditional use of MCP.
For example, they were used in area of the mechanical
mass separators of atoms and molecules of intensive
molecular beams (Murphy 1989). In recent years, new
interest in the application of MCP structures has been
stimulated by the intensive development of laser units. In
particular, the work (Tonucci et al. 1992) communicates
about the development of the MCP with the diameter of
the channels and the partition thickness between them
*33 nm. In this case the density of openings is
*3 9 1010 cm-2. The potential of the use of such struc-
tures is very high since the channels of structure can be
filled with materials with different properties (polymers,
metals, alloys, semiconductors, etc.). A novel method of
producing ordered arrays of glass nanocones with precisely
controlled height, lattice constant and aspect ratio is
recorded by (Urso et al. 2007).
In 1989 Sergey Sukhoveyev and Edward Kolerov from
Scientific Research Institute of Vacuum Techniques
(Moscow, Russia) proposed some design for thick X-Ray
masks with ultra-high aspect-ratio microstructure (Kolerov
and Sukhoveyev 1989). In contrast to MCP, in such masks
from lead glass, the cross-section of each channel can be
very predictable. It was the first step (not yet realized) on
S. Sukhoveyev (&)
Electronics Department, Sub-Faculty of Micro System
Techniques, Moscow State Institute of Radioengineering,
Electronic and Automatic (Technical University),
Pros. Vernadskogo, 78, 119954 Moscow, Russia
e-mail: [email protected]
123
Microsyst Technol (2008) 14:10991110
DOI 10.1007/s00542-007-0519-6
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
2/12
the way to the creation of fibrous composite MEMS and
NEMS. It was not realized since the authors creating this
mask as a technological tool for LIGA-technology, resulted
in an obtained fundamentally new product-microstructure
with geometric parameters that exceed LIGA-microstruc-
tures. Moreover, the prime cost of this new product proved
to be to very low, and the special features of fibrous
composite technology gave fundamentally new possibili-ties to the area of production volumetric microstructures:
obtaining geometrically similar microstructures on any
assigned scale in one and the same technological process.
The author of this article proposed to fill channels with
low-temperature alloy for the purpose of the creation of the
built-in wires or electrodes, and on this basis developed the
design of the fibrous composite stator of 3-phase syn-
chronous micromotor with external diameter of (0.02 -
2.0) mm. It is interesting that this idea was first perceived
in earnest only Russian childrens popular periodical
journal, Young Technician (Sukhoveyev and Ilin 1992)
which inspired to the development of fibrous compositeMEMS/NEMS technology (Beloglazov et al. 1999).
The essence of fiber technology consists of the process
of drawing the bundle from the tightly packed and spliced
fibers and (or) capillaries which primary are made of two
sorts of glass sharply differing from each other in terms of
solubility in the aqueous solution HCl. Most frequently
used hexagonal fibers, Fig. 1b, c, enable the densest
packing of the bundle and minimal withdrawal of
topological sizes of the cross-section of the bundle during
its pulling. The fibers composition in the bundle is deter-
mined by the pattern of the cross section of the
microstructure assigned on a certain scale. In this case the
dissoluble fibers (D) form the future channels, Fig. 2. They
further stretch the bundle into the thinner preserving the
geometric similarity of the bundles cross-section, Fig. 3.
The scale of pulling the bundle does not exceed the values
*(1:20 - 1:24). The prepared bundle is cut into parts
from which it is possible to form new bundle. This process
can be repeated many times. For example, an X-ray mask,
Fig. 7, was made from hexagonal fibers with the transverse
size of*0.5 mm, and each of these fibers was obtained by
pulling a bundle from*4,000 fibers. Cutting of the drawn
bundle is done by diamond disk using the internal cutting
edge. The minimum faultless length of the bundle piece in
this case comprises*0.3 mm. A shorter length and flat or
non-flat geometry of the microstructures can be obtained
by additional polishing. Figure 4 illustrates formation of
3D-structure by etching the bundle from indissolved core
(ID) and dissoluble shell (D)Fig. 4a, and from dissoluble
core and indissolved shellFig. 4b. Generally, the dis-
soluble and insoluble parts can have any assigned profile
section. The cantilevers are formed by etching the bundle
end, Fig. 4a. In the case shown by Fig. 4b the channels are
formed. Vacuum-tight partitions inside the channels,
Fig. 4c, can be obtained by etching two sides of the bundle.
In our experiments 5 lm-partitions were made inside the
channels of the X-ray mask of lead glass with a thickness
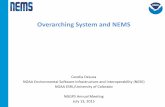
of the mask*5 mm. Figures 5, 6 and 7 demonstrate some
examples of the structures with cantilevers and X-ray
masks. In principle, the technology enables fabrication of
the cantilevers with predictable cross-sections, including
the channels, which can be filled with electrically con-
ducting substance.
Fiber composite technology gives great possibilities in
area of creation of microdevices with embedded wires or
electrodes. For example, Fig. 8 shows the fibers composi-
tion in the bundle forming the stator of a 3-ph synchronous
micromotor with a permanent magnet-rotor. The part of
these fibers (six groups) contains capillaries filled with
PbSn solder the melting point of which lower than the
softening temperature of the glass. This rule is primary
important for the pulling of the bundles containing
Fig. 1 Packing diagram of bundle from round (a) and hexagonal
fibers (b, c)
1100 Microsyst Technol (2008) 14:10991110
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
3/12
embedded micro and nanowires. It is one of the original
properties of the fiber technology. In the pulling process,
the bundle cross-section decreases continuously so that
directly in one cycle of pulling, geometrically similar
microstructures with an infinite number of standard sizes
can be obtained. None of the other technologies provide
this possibility. Moreover, specially selected composition
of the hollow and continuous fibers in the bundle enables
the fabrication of topologically complex microstructures
with predictable cross-sections without the retention of the
geometric similarity of the cross-section during pulling of
the bundle. For example, Fig. 9a shows a section of the
hollow cylinder with noncircular channels. The stator of
the micromotor, Figs. 9b and 10, was prepared by this
process. The channels of the stators preform were filled up
by PbSn-alloy. These capillary wires perform the role of
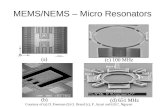
the active parts of the 1-turn phase windings. Figure 10
shows design, electric scheme and photo of 3-ph syn-
chronous micromotor with the stator and NdFeB rotor
described above.
The technology enables batch fabrication for different
types of devices which can involve, for example, fluidic,
light and X-ray devices. The fibers composition in the
bundle is selected specifically for this. The example of the
batch fabrication of the stators mentioned above, with
external diameter of*160 lm is shown by Fig. 11.
In principle, the plastic deformation process allows
giving to the composite bundle any 3D-geometry. For
example, twisting of the bundle is easily attended in
practice. The channels can be twisted around the axis of
bundle to some preset angle. Figure 12 gives some patterns
of the simplest devices which could be obtained in this
Fig. 2 Bundle packing diagram: dissoluble (D) and indissoluble (ID)
fibers
Fig. 3 Bundle pulling diagram
Fig. 4 Diagram of the production of the relief of the structure
Microsyst Technol (2008) 14:10991110 1101
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
4/12
case: Fig. 12a shows a structure with the twisted channels
that can be used as micro turbines or micro-worm con-
veyor, and Fig. 12b-analogous to its conical structure. The
possible application of such microstructures is not limited
only to mechanics. Its use in optics, X-ray and thermal
neutron optics, and also multichannel electron micro-optics
is distinctly evident from these figures. It is important to
emphasize the roughness of the channels does not exceed
*10 nm. This makes it possible to channel X-radiation by
them on the basis of the total external reflection effect.
Figure 12c shows the scheme of twisted cable, the
minimum diameter in practice composes *20 lm. With
powering this cable by 3-phase current it can be used as the
stator of the micromotor with an external rotor. It is not
difficult to see in this design some mechanical devices, for
example, a cylindrical gear. If the cable is made with
dissoluble shell for each of lived, and these shells are
eliminated to the specific length, Fig. 12d, such device
pretends to the use as an electrostatic actuator with
mechanical efforts (F).
Concluding the examination of the infinite series of the
possible applications of fibrous microstructures, one addi-
tional very important observation should be made. The
Fig. 8 Stator of micromotor with six groups of the capillary wires
Fig. 6 X-Ray code aperture (mask) from lead glass. Minimal lateral
size of the partition *400 nm
Fig. 7 X-Ray mask from lead glass with submicron partitions
*(200300) nm
Fig. 5 Micro-cantilevers (diameter*7 lm)
1102 Microsyst Technol (2008) 14:10991110
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
5/12
channels of fibrous microstructures can be filled with gases,
electrolytes, semiconductor materials, and also by materi-
als with other properties. In this case there are no visible
obstacles for all these diverse forms and types of channels
that would be present in one and the same microstructure.
Specifically in this the author sees unique special featuresof fibrous composite technology.
2 Prospects for fibrous composite nanotechnology
In contrast to planar technologies, the production of fibrous
nanostructures does not require special technological
equipment and super-expensive clean rooms. Nano-
dimensional structures, including structures with embedded
nanowires they obtain as a result of repeated pulling of the
bundle (amazingly simple and does not require any com-
mentary). The author saw some other original possibilities
of fibrous nanotechnology. One of them relates to pro-
duction of non-planar NEMS without using any
lithography processes (Sukhoveyev 2000) and as an
example is explained by the schematic of the production of
the stator of the micromotor, Fig. 13. According to this
diagram, the glass-fiber preform carries out two primary
tasks. First, it is used as the sacrificial body with prede-
termined 3D geometry and thus forms the geometric form
of the fabricated device. In the general case, this preform
can be prepared from the dissoluble and indissolved glasses
(partially sacrificial). Second, after removal of the surface
layer of the perform, for example by etching process
(Fig. 13bc) the special relief is fabricated and used later
as mask at the next step, Fig. 13d. This technological
approach makes it possible to fabricate devices from dif-
ferent materials: metals, polymers, rubber, etc.
Other prospects of using the fiber technology in the
NEMS area include the possibility of preparing the struc-
tures with sub-micron thickness partitions between the
channels. In the case of using the glass ultra-thin parti-
tions (as is known) possess membrane properties. Such
nanostructure arrays involving the channels filled by dif-
ferent sorts of electrolytes become similar to natural nerve
fibers. Consequently, under specific conditions they must
transfer signal-stimulus (information) from one end
to the other. Fibrous structure can be prepared with a
smoothly changing cross-section along its length. It is
known a change of a nerve fiber diameter ensures a change
in the speed of transmission on it of nerve impulse, and
Nature skillfully uses this with the creation of living
Fig. 10 Design, electric scheme and photo of the 3-ph micromotor
with NdFeB rotor and 1-turn phase windings: 1 hollow cylinder with
the channels inside the wall; 2 PbSn wires; 3 metal disk-connector
for all wires (point o); 4 rotor; 5 shaft; Ax, By, Cz-phase windings,
P power source
Fig. 9 Hollow cylinder: before (a) and after (b) filling the noncir-
cular channels by PbSn solder (microwires)
Microsyst Technol (2008) 14:10991110 1103
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
6/12
organisms. Thus, it is possible to speak about the possi-
bility of designing of artificial nerve fibers on the basis of
fibrous structures or, more modest-unique sensors.
It should be noted, fibrous nanotechnology provides not
only the possibility of preparing the structures unique in the
topology, but also it does not require expensive equipment
and rooms. In addition, it does not use any radiation. Finally,
this technology can be realized at any geographical point.
3 Prospects for fibrous composite technology in the
robotics
Creation of self-powered mobile sensors, microrobots
(MR) and mobile networks is at present new development
stage of MEMS technologies. On a global scale, the net-
works will accomplish monitoring the planets surrounding
media, on a global scale they will be able, for example: to
protect of a state border, inspect unattended areas of atomic
power plants, etc. One of the important tasks of the creationof mobile MR, caused by the idea that maximally small
overall size and the mass of detail of MR must be multi-
functional, and their quantity in the ideal must be equal to
one (one detailone MR). However, such MR is not
practically realized. Actually, one brief enumeration alone
of the vitally important knots (onboard power source,
engine, onboard controller, sensor, and transceiver) speaks
for itself. The author made an attempt at the estimation of
the possibility of designing the flying micro-robot by use of
the fibrous composite technology (Sukhoveyev 2003).
As the prototypes in this case the plants seeds which are
flying in air were selected. More precisely they float in it.
Reynolds Number is so small with the small dimensions of
the micro air vehicle (MAV) that it occurs much nearer to
the regime of floating in viscous air. From natural objects
the author spied the MAV prototype as dandelion seed
with a cone-shaped parachute system from fibers, Fig. 14.
Fig. 13 Non-flat fabrication
process sequence
(amin * 30 nm): a fabrication
of a sacrificial substrate 1 from
soluble glass with channels 2;
b, c etching of external surface
3 to obtain relief (mask);d fabrication of the promoter 4;
e removing the relief (mask) by
etching; f, g fabrication of the
functional layers 5, 6, by
electroplating ore another way;
h removing of the sacrificial
substrate
Fig. 11 The bundle with batch-fabricated seven preforms of the
micromotor stators (external diameter *160 lm)
Fig. 12 Schemes of the twisted structures
1104 Microsyst Technol (2008) 14:10991110
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
7/12
Sometimes in flight separate seeds interlace by their fibers
and form the hovering clouds. Previously has been spo-
ken about of ideal MR design. From this point of view,
the MAV design similar to the seed of dandelion is very
attractive. Fibers can perform simultaneously the roles of
parachute system, elastic feet (landing) or elastic guarding
shell (collision with an obstacle), and also the role of the
onboard source of electrical energy and radio-antenna.
In particular, the battery from the coaxial capacitors
executed in the form of fibers can have the following cal-
culated parameters. If charging voltage U= 2V, the outside
diameter of the cable (external electrode) 2R = 20 lm,
thickness of dielectric layer (R - r) = 0.5 lm, permeability
of dielectric e = 4, and the length of each cable l = 20 mm,
the capacity of one cable will be*87 pF. If the endsof these
cables are fixed and connected with each other (in parallel)
on area *4 mm2, and each cable occupies space
*(30 9 30) lm2 the number of cables in the battery will
prove to be equal *4444, and its capacity C* 0.4F.
Energy of this battery will be*0.8 J. If will be used as the
dielectric polymeric materials (density * 1,400 kg/m3) the
mass of battery (without mass of thin film external cable
electrode) will be*40 mg, and the specific density of the
stored energy of the battery is 0.02 J/kg.
The scheme of the MAV power unit with this battery
can appear analogous to Fig. 15 on which the number of
cables is shown in the reduced quantity. Cables can be
located on both sides of the disk since as their function,
they guarantee not only of planning MAV but also damp-
ing impacts with the obstacles and landings.
In principle, the simplest MAV can have aboard a
reserve of energy sufficient only for the sensor functioning
and delivery to its operator any alarm message about
target (fire, harmful gas, etc). However, according to the
authors intention, it must be capable of the autonomoustakeoff after landing. Therefore, in order to be joined away
from the earth by catching random puff of wind, the MAV
must be supplied with additional actuators ensuring its
takeoff and support of gliding condition. For this purpose
instead of disk 1, Fig. 15, it is more expedient to use the 3-
or 4-blade propeller, Fig. 16, which can revolve on a shaft
3 by magnetostatic slide bearing.
This propeller can be made in the form of tape solar cell
and fulfill the function of charger for the low-voltage fiber
battery. In addition, the unipolar dc-motors supplied with
its own propellers can be placed at the tips of the blades of
this propeller, Fig. 17. The mass of such a propeller can be*50 mg (the 1 cm2element can provide short-circuit
current *2.8 mA (1.8 - 2.3) V.
Another approach can use lithium film batteries. It is
important to note these micromotors, according to their
operating principle, must be dc-unipolar motors since, in
this case, their stator windings are powered directly from
the onboard power source without use of any additional
devices. Unfortunately, the very low power of these mi-
cromotors is pay for the gain in mass and simplicity of
design. Obviously, the presence of a propeller does not
solve the problem of takeoff in all possible situations. For
example, if the MAV sits in the grass, the possibility to
untwist the propeller is small.
In addition, the wing-actuator and/or micromotor on
reactive thrust can be used. It should be noted they would be
effective for super-light weight MAVs only. The design of
these actuators appears as follows. The shaft 3 of the pro-
peller, Fig. 16, can be used simultaneously as the fuselage.
Its external surface is covered with electrically conductive
film 3, Fig. 18. The ferromagnetic layer 4 is made over the
film 3 in the section of shaft angular sector *300. Elastic
Fig. 14 Dandelion seed: f fiber; s seed
Fig. 15 Art-work of the low-voltage battery-parachute system: 1
disk-shaped solar cell; 2 cross-section of the fiber battery; 3 cables
Fig. 16 Solar cell-propeller: 1 blade of solar cell-propeller; 2, 3
magnetostatic bearing
Microsyst Technol (2008) 14:10991110 1105
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
8/12
ferromagnetic wings 2 (one or several pairs) are attached to
the section of shaft that is free from film 4.
With current on the film along the fuselage, the resulting
ring-shaped magnetic flux is locked in the air gaps between
layer 4 and wings 2. This actuator is an electromechanical
resonator with wings in kind of moving element. One of the
authors ideas for the complex motion microwing is non-
continuous wing from elastic fibers of predetermined
length, Fig. 19. In this case we have a system of resonators
with their own mechanical parameters for each fiber.
It should be noted the independent application of such
wing-actuators can be useful for other devices. For exam-
ple, autonomous MRs designed to only creep could be
propelled along the same surface by jumping with the aidof the wing-actuator. In this case, power consumption for
its motion by jumping can prove to be less than con-
sumption for rolling or sliding along the surface. Another
scenario is possible, for example, during monitoring of
unattended areas of harmful or dangerous production,
storage, tunnels, etc. In these cases inspection robot with a
wing-actuator could be moved along an assigned route,
along a guide of cord, for example, along a powered wire-cord, passed through the fuselage.
Another takeoff-actuator can be an engine of the reac-
tive thrust, executed directly as a part of the bushing 2,
Fig. 16, which in this case combines the functions of the
bearing and the holder of the fibers (capacitors of battery).
The author took the design of this device, initially devel-
oped as a multichannel electron optic lens, Fig. 20, as the
basis of this engine. When the potentials U1 and U2 are
present on electrodes 3 and 6, an electric field 8 forms the
meniscus 9 of liquids 7 at the open end of each of the
channels 2. The form of the meniscus can be changed (by
supplying potential to the electrode that is isolated from
electrode 6 by insulator 10) to such an extent, the detach-
ment of the drop of liquid occurs, creating reactive thrust.
Technology provides the possibility of preparing the plate
1 with a minimum thickness of*0.3 mm and channels 2
with a minimum diameter of*0.3 lm. The cross-section
of the channels 2 can have any assigned geometry and
sizes. The distance between these channels can be also
predetermined. In addition, channels 2 can be prepared in a
cone-shaped core, twisted relative to the longitudinal axis
of the plate at specific angle. Electrode 3 consists of
capillary wires, the cross-section of which, and their
arrangement relative to the walls of the channels 2 can also
be predetermined. In general, the author sees the wider
application area of this design, in particular: a plasma
electron gun, liquid-metal ionic source, micro pump,
electrochemical microprobe, photon crystal, the wave-
guide of X-radiation, and also a device with all possible
combinations of the devices in the composition of one plate
enumerated above.
Returning to the MAV, one say the liquid propellant
rocket engine can also be prepared in the form of fibrous
Fig. 17 Solar cell-propeller with unipolar dc-motors (3): 1 blade; 2
detail of the magneto-static bearing; 4 propeller
Fig. 18 Flapping wings actuator: 1 fuselage; 2 wing; 3 electro-
conductive layer; 4 ferromagnetic layer
Fig. 19 Wings from independent fibers (1)
1106 Microsyst Technol (2008) 14:10991110
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
9/12
composite packed in orthogonal planes. In this case, each of
the fibers can contain one or several channels 2 with elec-
trodes 3. This engine can shoot liquid in the three mutually
perpendicular directions resulting in thrust vector of the
engine being controlled. A model of this composite, in the
form of cube*(5 9 5 9 5) mm, prepared by the gluing of
the preformed micromotor stators (Sukhoveyev et al. 1999)
is shown in Fig. 21. In the shear of the angle of model are
three visible orthogonal channels with six electrodes 3 each.
This model is a demonstration of the extraordinarily wide
and original possibilities of fibrous composite technology in
the field of the MAV creation. A common form of the MAV
Dandelion is shown by Fig. 22.
4 Micromotors on the basis of flexible fibrous
shells and their segments
It is known that stators winding of electric motors creates
a moving magnetic field. One of the simplest forms of such
a 2-phase winding appears a strip winding consisting of
two identical periodically bent conductors displaced rela-
tive to each other to fourth of their period along their
common longitudinal axis. Among the practical tasks of
MEMS there are tasks of displacement of microparticles,
liquid or other objects along the surface or in the depth
of body. In such micro-elevators as we find use grid
constructions from the microwire and multilayer tape
windings. Very often the windings with assigned 3D-
geometry can be made as independent attached elements of
the device only. This deficiency can be overcome by using
fibrous technology that enables fabrication of the micro-
structures with periodic relief of the surface. This relief iswell visible, for example, on the walls of the channels of
the X-Ray mask, Fig. 7. Earlier has been noted (Bel-
oglazov et al. 1999) a structure with this relief can be used
as X-Ray diffraction grating.
The stator involves two identical periodic surface
structures separated from each other by the air gap, and
Fig. 21 Example of the glass array with the microchannels placed in
orthogonal planes
Fig. 22 Art-work of the MAV Dandelion
Fig. 20 Scheme of the fluidic multichannel rocket engine; 1 fiber
glass array; 2 channel; 3 embedded microelectrodes; 4, 6 film
electrodes; 5, 10 insulating layers; 7 fluid; 8 field lines; 9 meniscus;
U1, U2-electrodes potentials
Microsyst Technol (2008) 14:10991110 1107
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
10/12
these structures are displaced relative to each other,
Fig. 23b. The phase stator windings are obtained by fab-
ricating a thin, continuous electrically conductive layer on
these surfaces with a relief. The profile of the windings can
have, for example, a form of meandering. With the pow-
ering of the windings by currents I1 and I2 taking place in a
direction transverse to the relief and moved between
themselves in the gap on the phase of the stator a runningmagnetic field will occur. The field speed is determined by
current frequency and by the period of the relief. Rotor or
slider they place in the gap. This is the special feature of
the described motors. They can be made on the structured
surface of the flexible fibrous shell or its segments with any
3D geometry and have several sections with the relief
surface between which, in the gaps (if necessary, nonlin-
ear), several moving elements of the motor can be moved.
In the case of a cylindrical motor with a revolving rotor,
one of the two parts of the stators preform with the periodic
relief of the surface can take the form, shown by Fig. 24.
Fibrous preforms, Fig. 24, can be hollow or continuous.Two such parts of the stator can be attached on both sides
of the shaft with the rotor. The outside diameter of this
stator which can be actually are made at precise dimensions
*20 lm. This device can also be used as an angular dis-
placement sensor. One property of fibers is their flexibility.
The value of a safe bend radius of the fiber comprises not
less than its hundred radiuses. Consequently, this property
of fiber gives new possibilities to the construction of
microdevices.
The author must emphasize here the selection of MAV as
the object of the possible application of the described
construction of micromotors is made for the purpose to
exclusively emphasize the enormous potential field of
activity for fibrous composite technology in the MEMS area.
5 Electrode and 3d-winding systems
from glass-metallic fabrics
It is well known the micro-robotics world needs very
powerful motors and actuators with 3D complex topology.
One of the most significant challenges is the creation of
some design and method of fabrication way for the
electrical windings, having many turns, with a complex,
predictable non-flat topology. There are similar tasks in
the area of non-contacts manipulation of the micropartsby travelling electric and magnetic fields (Moesner and
Higuchi 1997) and (Moesner et al. 1997). In an early
paper (Sukhoveyev et al. 1999) an idea of utilizing the
flexible fabrics from electro-conductive microfibers or
microwires in MEMS-area was briefly proposed. Recently
the glass-metallic fabrics were made by using industrial
equipment from the fabrication of conventional glass
fibers with low softening temperatures and metallic wires
made from Mo, Cu, FeNialloys with diameters of 20
120 lm (Sukhoveyev and Suetin 2003). The width of
such an industrial fabric band is about 1.0 m. Tiny pieces
cut from the fabric band demonstrate a high flexibility
suited to bond such a piece to the non-flat substrate with a
predictable 3D geometric shape. Flexibility of the fabric
is the main key that opens a door to novel and unusual
applications of the fabrics in the MEMS-area. Particu-
larly, such an approach enables fabricating of the
windings and electrode systems with numerical shapes.
The skeleton of the electric part of the fabric involves
long parallel elastic microwires. These microwires inter-
twine slim and long parallel flexible fiberglass beams.
Fig. 23 Micromotor on the basis of fibrous stator with periodic relief
surface: a diagram of currents I1 and I2; b design of stator; 1 part of
stator with periodic relief; 2 conducting layer; 3 ferromagnetic slider
or rotor
Fig. 24 Fibrous preforms of the stator (a, b, c) with the periodic
relief
1108 Microsyst Technol (2008) 14:10991110
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
11/12
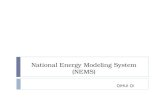
Figure 25 shows a general view of the fabric. The shapeof the elastic microwires is similar to a sinusoidal func-
tion every half-wave of which, intertwines two (Fig. 25b)
or three (Fig. 25c) fiber-glass beams. Another interesting
architecture feature of the fabric is a periodical space shift
of the neighboring half-wave of the wires. The shift
period equals *(a + b) (see Fig. 25b). This fabric feature
can be used in order to create 3D microsystems
that explore moving electric or magnetic fields by 2- or
3-phase windings or electrode systems. In such a system
the field will be moved along the fabric surface (flat or
non-flat). It is very important to mark a choice for the
method of fabrication some device from described fabricmust contains the way of fabrication leads and intercon-
nections between microwires manufacturing. If the fabric
is fixed on thin substrate from material that can be plas-
tically deformed without disruption of the fabric wires,
some area (or several areas) of such a preform can be
deformed by micro stamping. The wires after stamping
can have some predictable topology. When these wires
are powered the fabric can works, for example, as elec-
tromagnetic coil or an electron optic lens.
6 Conclusions
Thus, fibrous composite technology enables fabrication of
volumetric micro- and nano-structures with an ultra-high
aspect ratio inaccessible in its geometry to other known
technologies. At present, microand nanostructures from
the glass already are found a use as MCP, MEMS/NEMS
powerful devices, X-ray waveguides and lenses, and pho-ton crystals. It is important that one and the same
technology for preparing these completely different in the
functions devices is used. Exceptionally important are
other aspects. Fibrous composite technology does not use
radiation, it does not need extra-pure accommodations, it
can be realized practically at any geographical point and,
finally, it needs a minimum quantity of specialists of
average qualification. And the latter, fibrous composite
technology conceals the inexhaustible possibilities since
the materials which it can use are not exhausted.
Acknowledgments The author expresses gratitude to ProfessorPeter Maltcev of the Moscow State Institute of Radioengineering,
Electronics and Automation (Technical University) for the fruitful
discussions and critical relation to the work of the author in the area
of MEMS and NEMS.
Open Access This article is distributed under the terms of the
Creative Commons Attribution Noncommercial License which per-
mits any noncommercial use, distribution, and reproduction in any
medium, provided the original author(s) and source are credited.
References
Beloglazov VI, Sukhoveyev SP, Suetin NV (1999) Three-dimensional
micron and submicron structures based on fiber-glass technol-
ogies. In: Pustovoy VI, Jain VK (eds) Proceedings of SPIE Indo-
Russian workshop on micromechanical systems, 24 February
1999, New-Delhi. 3903:134140
Chesnokov VV, Fedchenko VI, Nazmov VP (1991) Study of SR
beam line Windows within the range of 1780 nm. Nucl Instr
Meth Phys Res A308:333335
Kolerov EP, Sukhoveyev SP (1989) Copyright USSR for invention of
X-Ray mask from glass fibers with ultra high aspect-ratio, N
1729225
Moesner FM, Higuchi T (1997) Traveling electric field conveyor for
contactless manipulation of microparts. In: IEEE industry
applications society annual meeting, New Orleans, Louisiana
3:20042011Moesner FM, Buhler PS, Politano DC, Prati PV (1997) Electrostatic
propulsion motor for tiny vessels. In: IEEE industry applications
society annual meeting, New Orleans, Louisiana 3:18741878
Murphy D (1989) Wall collisions, angular flux, and pumping
requirements in molecular flow through tubes and microchannel
arrays. J Vac Sci Technol A7(5):30753091
Sukhoveyev S, Ilin A (1992) The great achievements on the
microlevel. J Young Techn USSR 11:2123
Sukhoveyev SP, Stepanov VP, Beloglazov VI, Skibina NB, Stcher-
bakov AV, Suetin NV (1999) Fiber glass structure as basic
elements of moving actuators for microrobots operated by
Fig. 25 Diagram of fabric structure: a top-view; b, c two different
schemes of the microwires {(A, B, C) and (D, E, F)} and composition
of glass fibers g
Microsyst Technol (2008) 14:10991110 1109
123
-
8/3/2019 Sergey Sukhoveyev- Ultra high aspect-ratio MEMS and NEMS on basis of fibrous composite technology
12/12
umbilical cable. In: Proceedings of IARP international workshop
on micro robots, micro machines and systems, Moscow, Russia,
2425 November 1999, pp 185190
Sukhoveyev S (2000) Non-flat surface micromachining without
lithography for MEMS by use of fiber glass sacrificial substrates.
In: Proceedings of thesiss plenary session NEXUS Russian
conference on sensor, Saint-Petersburg, Russia, 2123 July 2000,
p 268
Sukhoveyev SP (2003) Tiny flying micro vehicle similar to gliding
dandelion seed. Built and application conceptions.In: Proceed-
ings of IARP international workshop on micro robots, micro
machines and systems, Moscow Russia, 2425 April 2003, pp
231238
Soukhoveyev SP, Suetin NV (2003) 3D micro windings and electrode
systems from glass-metallic fabrics for MEMS-applications. In:
Proceedings of IARP international workshop on micro robots,
micro machines and systems, Moscow, Russia, 2425 April
2003, pp 207210
Tonucci RJ, Justus BL, Campillo AJ, Ford CE (1992) Nanochannel
array glass. Science 258:783785
Urso BD, Simpson JT, Kalyanaraman M (2007) Nanocone array
glass. J Micromech Microeng 17:717721
1110 Microsyst Technol (2008) 14:10991110
123