
Semi-active Base isolation System for Buildings … Base isolation System for Buildings using MR...
6
Semi-active Base isolation System for Buildings using MR Dampers Sk. Faruque Ali & Ananth Ramaswamy Department of Civil Engineering, Indian Institute of Science, Bangalore, India Anil K. Agrawal Deptartment of Civil Engineering, City College of the City University of New York, NY 10031 Due to limitations on the use of passive base isolation systems which show poor performance in near field seismic excitations or active systems which require high external power, as stand alone control devices for a range of seismic excitations, a hybrid control system that mitigates the limitations of either passive or active control systems is preferred. The present study examines the use of semi–active base isolation systems for vibration mitigation. A combination of base isolation and MR-dampers forms the control device that has been deployed as a base isolation unit in the building. A combination of GA–fuzzy based control algorithm has been proposed to be implemented as a control strategy. Scaled seismic inputs for both near and far field excitations have been used in this study on three story (base + three) building. The paper presents the analytical modeling and results obtained through numerical experiments. 1 INTRODUCTION Mitigation of structural damage induced by large loads, stemming from earthquake, is of particular in- terest to engineers. Specifically, in seismic regions, earthquakes pose a serious threat to both the in- frastructure and human lives. The protection of civil structures, including its material content and the hu- man occupants, is without doubt a priority to the designers worldwide. The extent of protection may range from reliable operation and occupant comfort to human and structural survival. Base–isolation is one of the most widely applied structural protection technique against seismic events (Soong, 1990). Var- ious researchers have studied the potential of base isolation under far–field and near–field earthquake (Agrawal et.al. 2006). Studies reveled that base iso- lation strategy perform poor under near source excita- tion. Various benchmark exercises have also been un- dertaken to improving base isolation performance us- ing hybrid control strategies, such as the hybrid isola- tion system, consisting of a passive base isolation sys- tem (either rubber bearing isolators or sliding bearing isolators) and either active, or semi-active, or smart or passive control devices (Narashiman et.al. 2006). The philosophy of hybrid control technique is to reduce the structural responses under the limitation of both the control force level (limited by the num- ber and actuator capacity and the required amount of energy to drive the system) and the number of mea- sured signals. This approach is used to provide opti- mal solution to linear systems. In addition, hardware related constraints, such as saturation and resolu- tion of the sensor, analog-to-digital converter (ADC), and digital-to-analog converter (DAC), lead to quan- tization errors (Soong, 1990). Recently, the applica- tion of intelligent controllers [e.g., fuzzy logic con- troller (FLC), neural network Controller, ANFIS etc] to structural control problem have been studied exten- sively. Some characteristics of intelligent systems ap- pealing to control engineers are its effectiveness and ease in handling structural nonlinearities, uncertain- ties, and heuristic knowledge. Considerable research has been reported on the development and application of neural networks (Ghaboussi & Joghataie, 1995) for active control of civil structures. The advantage of these techniques is that they are independent of struc- tural models and relies only on the input–output map- ping. Vibration control using fuzzy logic, although has been studied earlier (Joghataie & Ghaboussi, 1994), (Battaini et.al. 1998), is on rise only recently. There has been an increasing interest in applying FLC to structures (Ali & Ramaswamy, 2007), (Ahlawat & Ramaswamy, 2004), (Jang et.al 2005) where some in- teresting results have been reported. Fuzzy control offers a simple and robust framework with which to specify nonlinear control laws, that can accommodate uncertainties and imprecision in the system model. A major advantage of fuzzy control is that it requires 1
Transcript of Semi-active Base isolation System for Buildings … Base isolation System for Buildings using MR...

Semi-active Base isolation System for Buildings using MR Dampers
Sk. Faruque Ali & Ananth RamaswamyDepartment of Civil Engineering, Indian Institute of Science, Bangalore, IndiaAnil K. AgrawalDeptartment of Civil Engineering, City College of the City University of New York, NY 10031
Due to limitations on the use of passive base isolation systems which show poor performance in near fieldseismic excitations or active systems which require high external power, as stand alone control devices for arange of seismic excitations, a hybrid control system that mitigates the limitations of either passive or activecontrol systems is preferred. The present study examines the use of semi–active base isolation systems forvibration mitigation. A combination of base isolation and MR-dampers forms the control device that has beendeployed as a base isolation unit in the building. A combination of GA–fuzzy based control algorithm has beenproposed to be implemented as a control strategy. Scaled seismic inputs for both near and far field excitationshave been used in this study on three story (base + three) building. The paper presents the analytical modelingand results obtained through numerical experiments.
1 INTRODUCTIONMitigation of structural damage induced by largeloads, stemming from earthquake, is of particular in-terest to engineers. Specifically, in seismic regions,earthquakes pose a serious threat to both the in-frastructure and human lives. The protection of civilstructures, including its material content and the hu-man occupants, is without doubt a priority to thedesigners worldwide. The extent of protection mayrange from reliable operation and occupant comfortto human and structural survival. Base–isolation isone of the most widely applied structural protectiontechnique against seismic events (Soong, 1990). Var-ious researchers have studied the potential of baseisolation under far–field and near–field earthquake(Agrawal et.al. 2006). Studies reveled that base iso-lation strategy perform poor under near source excita-tion. Various benchmark exercises have also been un-dertaken to improving base isolation performance us-ing hybrid control strategies, such as the hybrid isola-tion system, consisting of a passive base isolation sys-tem (either rubber bearing isolators or sliding bearingisolators) and either active, or semi-active, or smart orpassive control devices (Narashiman et.al. 2006).
The philosophy of hybrid control technique is toreduce the structural responses under the limitationof both the control force level (limited by the num-ber and actuator capacity and the required amount ofenergy to drive the system) and the number of mea-
sured signals. This approach is used to provide opti-mal solution to linear systems. In addition, hardwarerelated constraints, such as saturation and resolu-tion of the sensor, analog-to-digital converter (ADC),and digital-to-analog converter (DAC), lead to quan-tization errors (Soong, 1990). Recently, the applica-tion of intelligent controllers [e.g., fuzzy logic con-troller (FLC), neural network Controller, ANFISetc]to structural control problem have been studied exten-sively. Some characteristics of intelligent systems ap-pealing to control engineers are its effectiveness andease in handling structural nonlinearities, uncertain-ties, and heuristic knowledge. Considerable researchhas been reported on the development and applicationof neural networks (Ghaboussi & Joghataie, 1995) foractive control of civil structures. The advantage ofthese techniques is that they are independent of struc-tural models and relies only on the input–output map-ping. Vibration control using fuzzy logic, althoughhas been studied earlier (Joghataie & Ghaboussi,1994), (Battaini et.al. 1998), is on rise only recently.There has been an increasing interest in applying FLCto structures (Ali & Ramaswamy, 2007), (Ahlawat &Ramaswamy, 2004), (Jang et.al 2005) where some in-teresting results have been reported. Fuzzy controloffers a simple and robust framework with which tospecify nonlinear control laws, that can accommodateuncertainties and imprecision in the system model. Amajor advantage of fuzzy control is that it requires
1

only a linguistic description of the control law withfuzzy rules and does not require a detailed analyti-cal description of the structure. Moreover fuzzy con-trol can handle the hysteretic behaviour of structuresunder earthquake (Battaini et.al. 1998). Another ad-vantage of the FLC model in collaboration with MRdamper is unlike clipped optimal and Lyapunov con-trol techniques, the change in voltage input to the MRdamper is gradual and it covers all voltage values inthe range of maximum and minimum damper voltage[0,1]. This particular advantage not only permits thedesigner to use any voltage value between[0,1] butalso provides an inherent stability to the closed loopsystem (Ali & Ramaswamy, 2006).
A FLC includes a fuzzifier (fuzzification inter-face), an inference engine (rule base) and a defuzzi-fier to simulate linguistic and structured knowledgeby means of fuzzy set theory. It is up to the expertsknowledge to establish the fuzzy parameters (pre-scale gain, rule base, membership function type andparameters) (Ali & Ramaswamy, 2007). Therefore,formation of appropriate fuzzy if-then rules and mem-bership functions remains an intractable issue. Fur-thermore, static fuzzy rules and membership func-tion are vulnerable to changes in system parameters.One way to overcome this sensitivity to parametricchanges is to combine a fuzzy system with an opti-mization technique such that optimal parameters areselected for a predefined class of objective functions.
2 BASE ISOLATED BUILDING MODELA three storey rectangular building model built forexperimental studies using fuzzy logic controller, hasbeen taken for the present analytical work. Base iso-lation has been done using a set of springs and linearroller shafts at the base of the building model. Linearshafts were set in two tiers (each tier provides mo-tion in one direction) such that a 3D analysis can beperformed. The super structure and the base are mod-eled using three master degrees of freedom per floorat the center of mass and are assumed to linear for thepresent analysis. Floor slabs and the base are assumedto be rigid in plane. The super structure is assumedto be undamped. Base isolated buildings are designedsuch that the superstructure remains elastic. The equa-tions of motion are developed in such a way that thefixed base properties are used for modeling the linearsuperstructure. The MR dampers are assumed to beattached at the base of the building and the shake ta-ble (in both directions), so that it can restrict the largedeformation of the linear shafts. The equations of mo-tion for the elastic superstructure are expressed in thefollowing form:
Mn×n Un×1 +Cn×n Un×1 +K n×n Un×1 =−M n×n Rn×3
(
Ug + Ub)
3×1(1)
in which, n is three times the number of floors (ex-cluding base),M is the superstructure mass matrix,Cis the superstructure damping matrix in the fixed-basecase,K is the superstructure stiffness matrix in thefixed-base case andR is the matrix of earthquake in-fluence coefficients. Furthermore,U, U, andU repre-sent the floor acceleration, velocity and displacementvectors relative to the base,Ub is the vector of baseaccelerations relative to the ground andUg is the vec-tor of ground accelerations. The equations of motionfor the base are as follows:
RT3×n Mn×n
[
Un×1 + Rn×3(
Ug + Ub)
3×1
]
n×1+ Mb3×3
(
Ug + Ub)
3×1+Cb3×3 Ub3×1+Kb3×3 Ub3×1 + f3×1 = 0
(2)in which Mb is the diagonal mass matrix of the rigidbase,Cb is the resultant damping matrix of viscousisolation elements,K b is the resultant stiffness matrixof elastic isolation elements,f is the vector containingthe MR damper control forces. Combining Equation1 and Equation 2, we get the following equation ofmotion of the system.
M ¨X + C ˙X + K X + Fc = −M Ug (3)
whereM , C, K are matrices of appropriate form anddimension 12×12. TheX is a vector containing thesuper structure motion in X-direction, Y-direction, su-per structure rotation, base motion in two directionsand base rotation. Since, the model is rectangular andsymmetric about the axes present analysis does nottake into account the rotational components of themotion.
3 CONTROLLER DESIGNA hybrid strategy has been taken to suppress thebuilding vibrational levels under seismic excitations.A combination of base isolation and the semi–activemagnetorheological (MR) damper forms the hybridmechanism.
3.1 Magnetorheological damper modelFor analytical studies simple Bouc-Wen hystereticmodel has been taken. The equations governing theforce produced by this model are given as
f = c0 Ub + α zz = −γ ‖Ub‖ z ‖z‖n−1−β Ub ‖z‖n + A Ub
(4)
whereUb is the displacement of the base;z is the evo-lutionary variable, andγ, β , n, A are parameters con-trolling the linearity in the unloading and the smooth-ness of the transition from the pre-yield to the post-yield region. The functional dependence of the device
2

parameters on the command voltageuc is expressedas
α(uc) = αa +αb uc c0(uc) = c0a + c0b uc (5)
In addition, the resistance and inductance present inthe circuit introduce dynamics into this system. Thesedynamics are accounted for by the first order filter onthe control input given by
uc = −η(uc − v) (6)
whereη is the time constant associated with the firstorder filter andv is the command voltage applied tothe current driver. Equation 4 to Equation 6 show anonlinear force–command voltage relation. One candetermine the force required to suppress the build-ing vibration using feedback technique, but it is veryhard to determine the amount of voltage required bythe damper to provide that particular force require-ment. The advantage of the intelligent algorithms likeANN, fuzzy systemsetc. is in the ease with whichthey handle nonlinearity in the system. The advan-tages of fuzzy control include simplicity and intrinsicrobustness since it is not affected by the plant modelselection. In the present paper the voltage requirementof the MR damper is monitored using a GA basedfuzzy logic system (FLC).
3.2 GA based optimal fuzzy logic controlThe performance of conventional controllers (LQG,H2 etc.) depend fully on the accuracy in the mod-eling of the system dynamics and are effective incontrol of linear structural behavior. Complex struc-tural systems posses nonlinearities and uncertaintiesin the structural properties and measurements. Conse-quently, standard analytical model based control tech-niques are impracticable. As an alternative to conven-tional control theory, FLC allows the resolution of im-precise or uncertain informations. It maps the nonlin-ear input–output relation effectively and easily. It canalso handle the hysteretic behaviour of structures un-der earthquake loads (Battaini et.al. 1998). Further-more, FLC output [v(t)], used to monitor the voltagerequirement of the MR damper, can take any valuebetween [0,1] and therefore covers full voltage rangeavailable for the damper (Ali & Ramaswamy, 2006).In the process the voltage switch is gradual and doesnot jump between maximum and minimum voltagevalues as in Lyapunov or LQG clipped optimal cases.
The design of an optimal FLC can be viewed as asearch in a multi-dimensional space, or hypersurface,where combinations of differing component proper-ties of the fuzzy system (rule base, input–output mem-bership functions, their properties and scaling gains)correspond to a point in that space. Fuzzy search sur-faces are large, since the choice in the number and
properties of fuzzy sets for each variable is unlimited,non-differentiable as changes in fuzzy set numbersand rules are discrete and therefore create points ofdiscontinuity on the surface and multi–modal, sincedifferent rule bases and MFs may have comparableperformance (Shi et.al. 1999). This characteristics ofFLC makes application of a GA to find an optimal lo-cation within search surface, feasible and an attractiveone.
In this paper GA has been used for automaticallygenerating the rule base, membership functions (MFs)parameters in order to optimize the FLC response. Inthis study, an optimization of the FLC was attemptedwith a priori information in relation to of the num-ber of rules and the number of MFs that give mean-ing to these rules. For the GA used in this study, eachchromosome represents a complete FLC as defined byMAT LABr (MATLAB, 2004) fuzzy inference files(FIS). FLC input–output relation in the first mode ofvibration of the structure (Ali & Ramaswamy, 2007),(Ahlawat & Ramaswamy, 2004) is exploited to de-sign the adaptive rule base keeping the symmetryin the rule base intact. To achieve the symmetry inrule base, a geometric approach is taken which re-duces the required chromosome length and therebythe search space is reduced. This reduces the com-putational overhead of the optimization scheme. Thechoice of initial rule base pattern is dependent on thefirst mode of vibration of the structure, in effect it rep-resents an a priori knowledge being made available tothe algorithm.
Present FLC has two inputs (premises), relative ve-locity and acceleration at the point of the action ofthe damper and one output (consequent), control volt-age,v(t)∈ [0,1], which is then passed to MR damper.The input variables are normalized over the UOD(universe of discourse) of [-1 1]. The input variablesrange their respective UOD using five membershipfunctions (NL=Negative Large, NS=Negative Small,ZE=Zero, PS=Positive Small, PL=Positive Large),whereas the output space is mapped using sevenmembership function. It is to be noted that the outputcontains negative values, this has been done to keepsymmetry about the zero in UOD. Therefore to getoutput voltage as positive values between [0, 1], theMATLAB r abs function has been used, which takesany input value [−∞, ∞] and gives only the absolutevalue [0, ∞] as an output.
In this geometric approach the consequent space isoverlayed upon the ‘premise coordinate system’ andis in effect partitioned into non–overlapping small re-gions (in our case 5), where each region represents aconsequent fuzzy set (see Fig. 1). To design the adap-tive rule base we define a consequent line as shown inFigure 1. The line is made pivotal on premise zero–zero position (i.e. both inputs being zero) and it is
3

Figure 1: Adaptive rule base design
free to rotate over the consequent space and there-fore the rule base adapts according to the optimizationscheme. It is to be noted that the rule base remainssymmetrical what ever be the position of the conse-quent line. The rule base is then extracted by deter-mining the consequent region in which each premisecombination point lies. The geometric approach ismade possible using two different parameters.
• Slope of the consequent line angle CA: It hasbeen used to create the output space partitions(angles between 0− 180◦), as the outputv(t)range is[0,1].
• Consequent-region spacing (CS): As seen fromFigure 1 CS is the proportion of the fixed-distance between the premises (NL, NE, NS, ZE,PS, PO, PL) on the coordinate system and is usedto define the distance between consequent pointsalong the consequent line.
Generalized bell shaped (MATLAB, 2004) member-ship function (MF) is used for all the input–outputvariables in the analysis, as it can assume any otherMF shape. The MF properties altered by the GA areMF shape, MF center shift and MF slope at 0.5 mem-bership grade. While attempting to encode the FLCmembership functions associated with the 2 inputsand 1 output, the UOD is kept symmetrical aboutthe central, zero region for each variable. The ex-treme MF for input variables are kept unbounded inthe respective positive (s-shaped) and negative (z-shaped) UOD. To enable evaluation of non-uniformdistributed MFs, slope at 0.5 membership grade isalso encoded. This is achieved by raising each of theMF to the power that ranges from 0.5 to 2.
4 NUMERICAL ANALYSISTime history analysis of the 3D analytical build-ing model has been done for five near source earth-quakes namely, Jiji (1999), NorthPalm Spring (1986),Northridge (1994), KobeNIS (1995), Chichi (1999),and Terkey Bolu (1999) with bi–directional excita-tions. The state space form of the differential equa-tion (Equation 3) has been deduced and solved usingode45 in MATLAB r. The schematic diagram of the
Figure 2: Simulation model
simulation is shown in Figure 2. Two different fuzzymodels have been used in two orthogonal direction,i.e. one genetically optimized FLC has been used forthe controller in X–direction and another GA opti-mized FLC for the controller in Y–direction. The rulebase has been modified at every second of the sim-ulation to save computational time. Each evaluationof GA uses a genetically-altered version of the orig-inal FLC which is defined using the MATLABr FISstructure (MATLAB, 2004).
Base isolations are provided to separate the su-perstructure from catastrophic earthquake excitations.But, the excessive displacement that the isolators un-dergo in near–fault ground motion brings in a causeof concern to the structural engineers (Narashiman &Nagarajaiah, 2006). Non-linear passive dampers areprovided to limit the bearing displacement in such sit-uations. This however, increases the forces in the su-perstructure and at the isolation level. In the presentstudy MR dampers are provided to minimize bearingdisplacement as well as to keep the bearing accelera-tion to a minimum, as the bearing acceleration is di-rectly proportional to bearing shear force. The FLChas been optimized using GA to meet this demand.Therefore, the weighted multi-objective function tobe optimized by GA is taken to be
φ = w1×U2b +w2×U2
b (7)
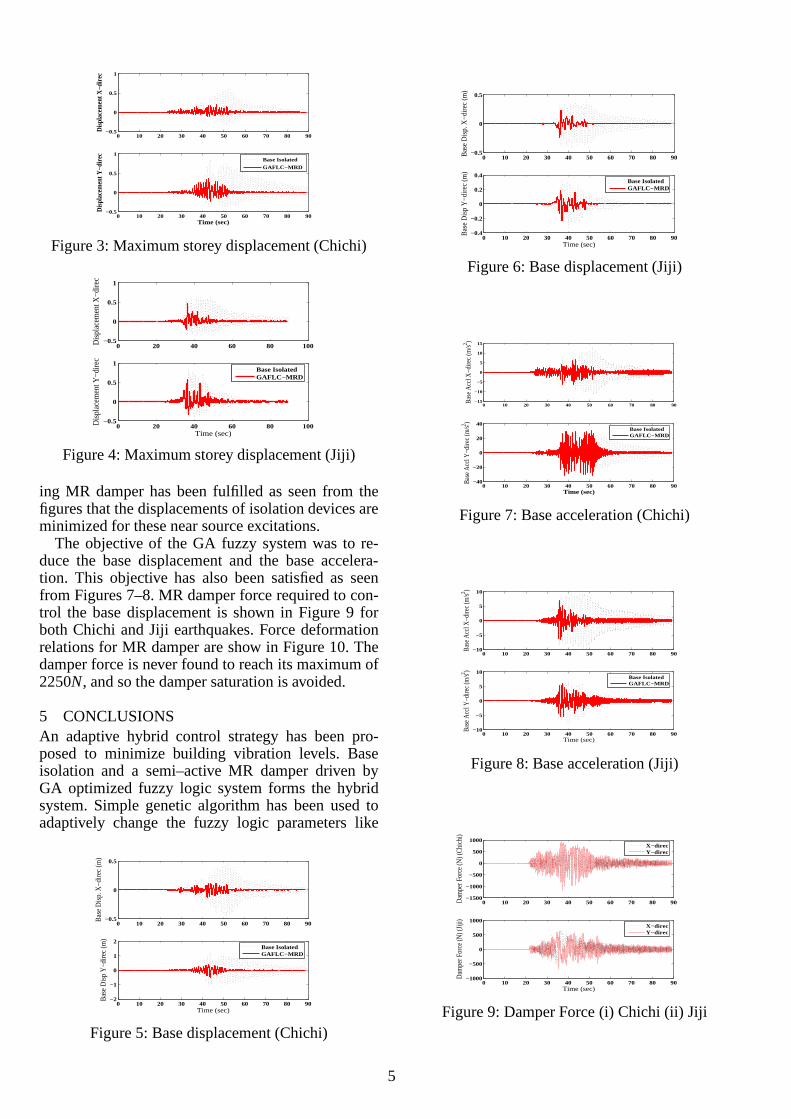
Where wi’s are the weights for each objective. Bysuitably adjusting the weights a set of nondominatedpareto optimal solution can be obtained. In the presentstudy, only one such solution corresponding tow1 =w2 = 1.0 i.e. equal importance to all objectives hasbeen reported. Results have been shown for Chichiand Jiji earthquakes. Simple genetic algorithm (Gold-berg, 1989) has been used to optimize the objectivefunction. Figures 3– 4 show the maximum storey dis-placement normalizedw.r.t fixed base maximum dis-placement. Figures 3– 4 contains two figures each,first one is for X-direction and the second one is forY-direction. It is clear from these figures that the max-imum storey displacement is reduced for both passivebase isolation and base isolation with fuzzy drivenMR damper system. Hybrid system consisting of baseisolation and MR damper provides better control asthe displacements are far less.
Base displacements for Chichi and Jiji earthquakesare shown in Figures 5– 6. The motivation of employ-
4
0 10 20 30 40 50 60 70 80 90−0.5
0
0.5
1
Dis
plac
emen
t X−d
irec
0 10 20 30 40 50 60 70 80 90−0.5
0
0.5
1
Time (sec)
Dis
plac
emen
t Y−d
irec
Base Isolated
GAFLC−MRD
Figure 3: Maximum storey displacement (Chichi)
0 20 40 60 80 100−0.5
0
0.5
1
Dis
plac
emen
t X−d
irec
0 20 40 60 80 100−0.5
0
0.5
1
Time (sec)
Dis
plac
emen
t Y−d
irec
Base IsolatedGAFLC−MRD
Figure 4: Maximum storey displacement (Jiji)
ing MR damper has been fulfilled as seen from thefigures that the displacements of isolation devices areminimized for these near source excitations.
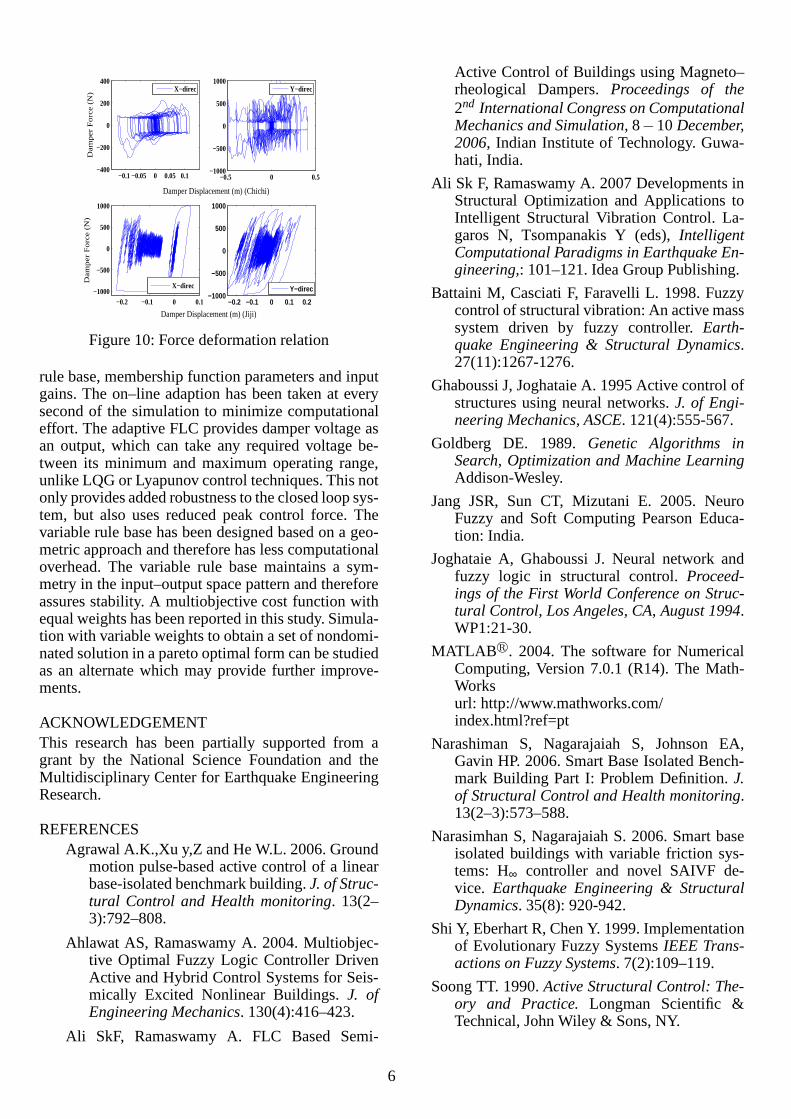
The objective of the GA fuzzy system was to re-duce the base displacement and the base accelera-tion. This objective has also been satisfied as seenfrom Figures 7–8. MR damper force required to con-trol the base displacement is shown in Figure 9 forboth Chichi and Jiji earthquakes. Force deformationrelations for MR damper are show in Figure 10. Thedamper force is never found to reach its maximum of2250N, and so the damper saturation is avoided.
5 CONCLUSIONSAn adaptive hybrid control strategy has been pro-posed to minimize building vibration levels. Baseisolation and a semi–active MR damper driven byGA optimized fuzzy logic system forms the hybridsystem. Simple genetic algorithm has been used toadaptively change the fuzzy logic parameters like
0 10 20 30 40 50 60 70 80 90−0.5
0
0.5
Bas
e D
isp.
X−d
irec
(m)
0 10 20 30 40 50 60 70 80 90−2
−1
0
1
2
Time (sec)
Bas
e D
isp
Y−d
irec
(m)
Base IsolatedGAFLC−MRD
Figure 5: Base displacement (Chichi)
0 10 20 30 40 50 60 70 80 90−0.5
0
0.5
Bas
e D
isp.
X−d
irec
(m)
0 10 20 30 40 50 60 70 80 90−0.4
−0.2
0
0.2
0.4
Time (sec)
Bas
e D
isp
Y−d
irec
(m)
Base IsolatedGAFLC−MRD
Figure 6: Base displacement (Jiji)
0 10 20 30 40 50 60 70 80 90−15
−10
−5
0
5
10
15
Bas
e A
ccl X
−dire
c (m
/s2 )
0 10 20 30 40 50 60 70 80 90−40
−20
0
20
40
Time (sec)
Bas
e A
ccl Y
−dire
c (m
/s2 )
Base IsolatedGAFLC−MRD
Figure 7: Base acceleration (Chichi)
0 10 20 30 40 50 60 70 80 90−10
−5
0
5
10
Base
Acc
l X−d
irec
(m/s2 )
0 10 20 30 40 50 60 70 80 90−10
−5
0
5
10
Time (sec)
Base
Acc
l Y−d
irec
(m/s2 )
Base IsolatedGAFLC−MRD
Figure 8: Base acceleration (Jiji)
0 10 20 30 40 50 60 70 80 90−1500
−1000
−500
0
500
1000
Dam
per F
orce
(N) (
Chi
chi)
X−direcY−direc
0 10 20 30 40 50 60 70 80 90−1000
−500
0
500
1000
Dam
per F
orce
(N) (
Jiji)
Time (sec)
X−direcY−direc
Figure 9: Damper Force (i) Chichi (ii) Jiji
5
−0.1−0.05 0 0.05 0.1−400
−200
0
200
400
Damper Displacement (m) (Chichi)
Da
mp
er
Fo
rce
(N
) X−direc
−0.5 0 0.5−1000
−500
0
500
1000Y−direc
−0.2 −0.1 0 0.1−1000
−500
0
500
1000
Damper Displacement (m) (Jiji)
Da
mp
er
Fo
rce
(N
)
X−direc
−0.2 −0.1 0 0.1 0.2−1000
−500
0
500
1000
Y−direc
Figure 10: Force deformation relation
rule base, membership function parameters and inputgains. The on–line adaption has been taken at everysecond of the simulation to minimize computationaleffort. The adaptive FLC provides damper voltage asan output, which can take any required voltage be-tween its minimum and maximum operating range,unlike LQG or Lyapunov control techniques. This notonly provides added robustness to the closed loop sys-tem, but also uses reduced peak control force. Thevariable rule base has been designed based on a geo-metric approach and therefore has less computationaloverhead. The variable rule base maintains a sym-metry in the input–output space pattern and thereforeassures stability. A multiobjective cost function withequal weights has been reported in this study. Simula-tion with variable weights to obtain a set of nondomi-nated solution in a pareto optimal form can be studiedas an alternate which may provide further improve-ments.
ACKNOWLEDGEMENTThis research has been partially supported from agrant by the National Science Foundation and theMultidisciplinary Center for Earthquake EngineeringResearch.
REFERENCESAgrawal A.K.,Xu y,Z and He W.L. 2006. Ground
motion pulse-based active control of a linearbase-isolated benchmark building.J. of Struc-tural Control and Health monitoring. 13(2–3):792–808.
Ahlawat AS, Ramaswamy A. 2004. Multiobjec-tive Optimal Fuzzy Logic Controller DrivenActive and Hybrid Control Systems for Seis-mically Excited Nonlinear Buildings.J. ofEngineering Mechanics. 130(4):416–423.
Ali SkF, Ramaswamy A. FLC Based Semi-
Active Control of Buildings using Magneto–rheological Dampers.Proceedings of the2nd International Congress on ComputationalMechanics and Simulation, 8−10 December,2006, Indian Institute of Technology. Guwa-hati, India.
Ali Sk F, Ramaswamy A. 2007 Developments inStructural Optimization and Applications toIntelligent Structural Vibration Control. La-garos N, Tsompanakis Y (eds),IntelligentComputational Paradigms in Earthquake En-gineering,: 101–121. Idea Group Publishing.
Battaini M, Casciati F, Faravelli L. 1998. Fuzzycontrol of structural vibration: An active masssystem driven by fuzzy controller.Earth-quake Engineering & Structural Dynamics.27(11):1267-1276.
Ghaboussi J, Joghataie A. 1995 Active control ofstructures using neural networks.J. of Engi-neering Mechanics, ASCE. 121(4):555-567.
Goldberg DE. 1989.Genetic Algorithms inSearch, Optimization and Machine LearningAddison-Wesley.
Jang JSR, Sun CT, Mizutani E. 2005. NeuroFuzzy and Soft Computing Pearson Educa-tion: India.
Joghataie A, Ghaboussi J. Neural network andfuzzy logic in structural control.Proceed-ings of the First World Conference on Struc-tural Control, Los Angeles, CA, August 1994.WP1:21-30.
MATLAB r. 2004. The software for NumericalComputing, Version 7.0.1 (R14). The Math-Worksurl: http://www.mathworks.com/index.html?ref=pt
Narashiman S, Nagarajaiah S, Johnson EA,Gavin HP. 2006. Smart Base Isolated Bench-mark Building Part I: Problem Definition.J.of Structural Control and Health monitoring.13(2–3):573–588.
Narasimhan S, Nagarajaiah S. 2006. Smart baseisolated buildings with variable friction sys-tems: H∞ controller and novel SAIVF de-vice. Earthquake Engineering & StructuralDynamics. 35(8): 920-942.
Shi Y, Eberhart R, Chen Y. 1999. Implementationof Evolutionary Fuzzy SystemsIEEE Trans-actions on Fuzzy Systems. 7(2):109–119.
Soong TT. 1990.Active Structural Control: The-ory and Practice. Longman Scientific &Technical, John Wiley & Sons, NY.
6


















